PID參數工程整定方法研究
2016-11-16 03:07:40許雪
中國氯堿 2016年9期
許雪
(天津渤天化工有限公司計控部,天津 300480)
PID參數工程整定方法研究
許雪
(天津渤天化工有限公司計控部,天津 300480)
本文分析了PID控制模型中比例積分微分的作用,介紹了傳統PID參數整定的方法,并總結了PID參數經驗整定方法,應用該方法對堿液降膜蒸發流量液位串級控制系統主調和副調PID參數進行調整,并取得了較穩定的控制效果。
PID控制;串級控制;經驗試湊法
PID控制即比例、積分、微分控制,廣泛應用于工業生產的儀表控制領域,是一種以消除偏差為目的的線性控制方式,PID控制器結構簡單,參數靈活,易于調整,在單元組合儀表控制轉變成集散控制系統的今天,仍然發揮著巨大的作用。
1 PID控制器模型
常規PID控制器系統框圖見圖1,系統主要由PID控制器、執行器和被控對象組成。作為一種線形控制器,根據設定值和輸出值構成偏差,按比例、積分和微分通過線性組合構成控制量,對被控對象進行控制。
其中:
e(t)=r(t)-y(t)
PID控制器的控制規律為:
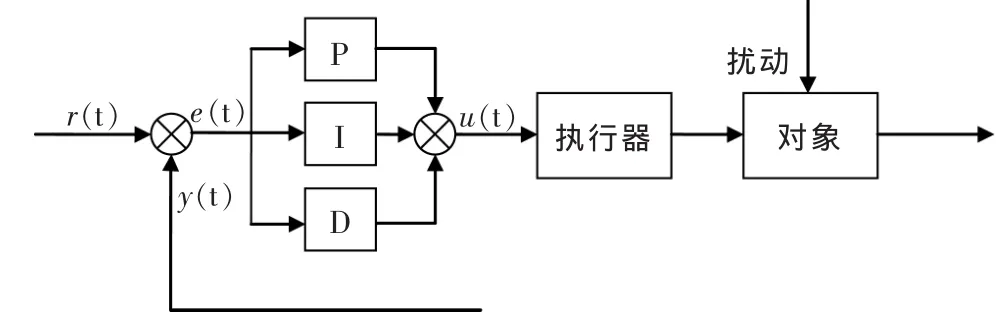
圖1 PID原理圖

式中:r(t)為給定量;y(t)為被控量;e(t)為給定量與被控量的差值;u(t)為調節器輸出;Kp為比例系數;TI為積分時間;TD為微分時間。
比例的作用是減小偏差,P及時成比例的反映控制系統的偏差信號,偏差一旦產生,控制器立即產生控制作用,減少偏差。當比例P增大時,執行機構動作靈敏、速度快。在系統穩定的情況下,增大P值,有利于減小穩態誤差,提高系統的控制精度,但不能完全消除穩態誤差。隨著P的增大,系統響應過程中的振蕩次數會增多。當P值太大時,系統將趨于不穩定;若P值太小,會降低系統的響應速度,執行元件動作緩慢。
積分環節作用是消除余差,提高系統的無差度。積分時間越小,積分作用越強,積分時間太小時,系統將不穩定,振蕩次數較多;但積分時間太大時,積分作用對系統性能影響減小,不利于消除系統的穩態誤差,控制精度低。
微分環節能反映偏差信號的變化趨勢變化速率,并能在偏差信號值變得太大之前,在系統中引入一個超前修正信號,從而加快系統的動作速度,減小調節時間,改善系統的動態性能,提高控制精度。但微分時間不能太大,太大會使系統不穩定,產生振蕩。
2 傳統PID參數整定方法
(1)動態特性參數法。控制器在開環狀態下,施加階躍信號或脈沖信號,通過系統響應的數據來推算系統參數,進而計算控制器參數。最早的開環PID經驗整定方法是z-N整定。其特點是無需建立被控對象的數學模型,通過在現場進行實驗而獲得給定系統的暫態響應,從而求取K,T,t等參數,適合用于可近似用一階慣性環節加延遲環節來表示的被控對象。
(2)臨界比例度法。也稱為z-N閉環整定方法,通過比例控制作用激發出等幅振蕩來求取臨界增益Kc和臨界振蕩周期Tc并以此整定參數。該方法基本思想是:系統只投入比例作用,去掉微分和積分作用,給定信號為階躍形式,逐漸增大比例系數KP,直到系統發生持續等幅振蕩,然后記錄下系統的I臨界振蕩周期Tc和使系統發生振蕩的臨界放大系數Kc,利用上述兩個參數代入下式計算就可確定好PID調節器的3個參數。
KP=0.6Kc;TI=0.5Kc;Td=0.125Kc
相對于Z-N開環整定方法,z-N閉環整定方法有不需要斷開控制回路和相對受擾動影響較小的優點,在工業上獲得了廣泛的應用。但使用此方法時需使系統處于等幅振蕩狀態,所以應考慮被控過程和執行器的承受問題。
(3)衰減曲線法。先將積分時間置于最大值,微分時間置于最小值,然后讓設定值的變化作為干擾輸入,逐漸改變比例系數,觀察系統的輸出響應曲線。按照過渡過程的衰減情況改變比例系數的值,直到系統出現4∶1或10∶1的衰減振蕩,記下此時的比例系數和衰減振蕩周期Ts,再根據相應公式整定參數。
3 工業現場經驗原則
(1)理論上液位不需要微分作用,但在液位計出現不穩定波動時可以加微分,流量控制系統中比例度P可以增大到200,而在溫度控制系統積分時間可以達到1 000 s以上。
(2)PID參數調整過程中,若出現等幅震蕩或發散,必然有比例或積分作用強,可以適當減小比例度或增大積分時間,減小比例和積分作用。
(3)執行機構的選擇要合理,一般閥的50%~70%開度時能穩定控制,若開閥10%就出現流量或液位的大幅波動,說明閥的選型不合理。
4 降膜蒸發堿液液位流量串級控制PID參數整定
理論上液位Ⅱ效蒸發器的液位自電解液管進入,濃縮后流出至Ⅰ效蒸發器,若使液位LC502穩定在23%,則進液出液要動態平衡,即進液流量=出液流量+蒸發掉的液體,使用串級控制,液位LC502控制流量FC503,流量FC503控制調節閥LV502,從而消除了流量的滯后,見圖2。

圖2 蒸發工序NaOH液位流量串級控制
串級控制系統PID參數的整定,采用的是2步整定法。先不考慮外環,內環為單回路PID控制,在內環加階躍信號,調整內環PID參數,看如何能得快速穩定在設定值;再把主調PID串級連上,在外環加階躍信號,調整外環PID參數,看如何能得到穩定曲線。在實際應用中,先把副調節器投入自動,主調斷開,按照單回路的方法整定副調PID參數,再把主調節器投入自動,形成串級控制,整定主調PID參數。
如果采用衰減曲線法,將主調比例度固定在100%,逐漸減小副調比例度,直到系統出現4∶1的衰減振蕩,記下此時的比例系數和衰減振蕩周期T2s,再逐漸減小主調比例度,直到系統出現4∶1的衰減振蕩,記下此時的比例系數和衰減振蕩周期T1s,根據相應公式整定參數見圖3。
從圖3可以看到,當工況產生波動時,液位LICA-0502小幅上漲,控制器迅速調節流量FICA-0503,使流量大幅降低,閥位減小(FICA-0503.MV),由于閥是氣關閥,所以MV增大,使LICA-0502穩定在23%附近。調整的PID參數可以實現對液位的穩定控制。
Study of PID parameters adjust method
XU Xue
(Tianjin Botian Chemical Co.,Ltd.,Tianjin 300480,China)
This article analyzes the effect of proportion,integrate and differential control in the PID control model,introduces traditional PID parameter tuning methods,and summarizes the PID parameter empirical tuning methods,depending on the method of falling film evaporator flow level cascade control system,the main theme and the sub-tune PID parameters can be adjusted,the result indicates that the System can control the process of production smoothly.
PID control;cascade control;empirical tuning method
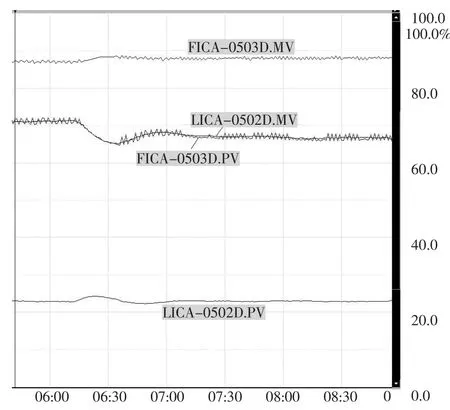
圖3 控制效果
TM762
B
1009-1785(2016)09-0044-02
2016-07-17
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維護與修理(2015年2期)2015-02-28 12:15:41