連續地月載荷轉移系統二維柔性動力學建模與分析
2016-11-17 05:34:38齊乃明孫啟龍林海奇
哈爾濱工業大學學報 2016年10期
關鍵詞:振動
齊乃明,陽 勇,趙 鈞,孫啟龍,林海奇
(哈爾濱工業大學 航天學院,哈爾濱 150001)
?
連續地月載荷轉移系統二維柔性動力學建模與分析
齊乃明,陽 勇,趙 鈞,孫啟龍,林海奇
(哈爾濱工業大學 航天學院,哈爾濱 150001)
為研究系繩柔性對連續地月載荷轉移系統(continuous cislunar payloads transfer system, CCPTS)動力學的影響,利用Lagrange方法建立了CCPTS二維柔性動力學模型,并對所建立的二維柔性動力學模型進行了理論及仿真分析.通過對系繩為柔性繩與剛性桿兩種情況下的動力學進行仿真對比分析表明:系繩柔性對CCPTS軌道、姿態參數有一定的影響,而這種影響表現為變量變化的時間不同步,并且會隨著時間的推移逐漸增大;系繩的柔性特性導致母星徑向加速度以及真近角加速度出現“毛刺”現象;由系繩長度所產生的重力梯度力矩對剛性桿和柔性繩產生了不同程度的影響;當外力矩不存在時,系繩旋轉角速度隨時間周期變化,當外力矩不為零時,旋轉角速度隨時間近似線性增加,增加的快慢由外力矩的大小決定.此外,系繩初始旋轉角速度以及系繩長度對系繩的橫向、縱向振動的幅值和周期均產生了一定的影響.
動量交換;地月轉移;繩系衛星;柔性;動力學
隨著人類邁向太空步伐的加速,深空探測任務變得也越發頻繁,積極地進行太空探索與開發的時代也隨著航天等相關領域的各種技術的進步而慢慢到來.月球作為離地球最近的一個天體,自然而然成為了人類離開地球、邁向深空的首個開發目標.眾所周知,以“阿波羅”系列為典型代表的月球探測飛行器由于技術復雜、成本高昂、不可重復使用等缺點,早在上世紀70年代就已經退出了歷史舞臺.為了建立月球基地,需要研制出能夠實現較大運載能力、可重復使用、節省能量的地月運輸工具來實現地月之間大規模的物資轉移(對于建立月球基地,就需要從地球向月球運送大量的水、食品、科考器材等,同時需要從月球向地球運送大量的寶貴的月球采樣的樣品以及其他物質).
基于此想法,學者大膽地提出了兩種構想,一種構想是以TUI公司的Robert[1-2]為代表的研究團隊于1980年首次提出的一種動量交換/電動繩系衛星推進系統(momentum-exchange/electrodynamic reboost tethers, MXER).MXER采用動量交換原理,結合電動繩系變軌原理進行載荷轉移.該系統一次只能轉移一個載荷,并且在轉移載荷的過程中,母星系統的軌道參數由于動量(或能量)的損失將發生較大變化,因此需要采用電動繩原理進行軌道的調整與恢復.另一種基于動量交換原理進行載荷運輸的繩系衛星系統概念是英國Glasgow大學的Cartmell[3-4]等于1996年首次提出的驅動型動量交換繩系衛星(motorized momentum exchange tether,MMET).MMET不同于MXER,MXER主要實現載荷與母星之間的動量交換以完成載荷的軌道轉移,而MMET將母星置于系統質心處,而由兩根等長的系繩分別連接兩套相同的抓捕系統.這樣,MMET就能更加合理地利用兩個載荷之間的能量轉移,在不消耗母星能量的前提下同時實現其中一個載荷升軌、另一個載荷降軌的目的.
在此后近20年的研究歷程中,Cartmell及其研究團隊繼續對MMET廣泛地開展研究.Ziegler等[5-6]通過將系繩簡化為剛性桿模型對MMET動力學進行了研究,同時也針對性地開展了一些地面模擬試驗.在文獻[5-6]研究的基礎上,Chen等[7-9]將系繩的柔性特性加入到MMET動力學模型的建立過程中,并對柔性動力學進行了初步的仿真分析,其研究成果標志著MMET動力學的研究向更實際的情況靠近.此外,Murray等[10-11]對基于MMET的地月轉移系統中的月球跟蹤軌道進行了研究.結果表明,如果月球軌道的升交點(或降交點)能夠被準確地跟蹤,則MMET通過適時發送載荷使得載荷與月球同時到達該點,并保證載荷能夠被月球影響球捕獲.
近來,齊乃明等[12-13]在上述研究基礎上對MMET進行了進一步的研究.首先,對載荷的兩種地月轉移方式(MMET方式以及傳統脈沖方式)進行了能量對比分析.研究結果表明,相同條件下,采用MMET進行載荷的地月轉移所需的能量比采用傳統脈沖變軌方式進行載荷地月轉移所需的能量要少.其次,將結構偏差(即系繩長度存在偏差以及載荷質量存在偏差)、錐形繩的概念引入到MMET之中[13-15],分析了結構偏差對母星軌道參數、姿態參數的影響,并分析了錐形繩對母星軌道、姿態以及系統能量的影響.
綜上所述,文獻[5-6]在處理系統勢能時,采用了離散處理方法,該方法的精度取決于離散程度,而且在求解動力學方程時略顯復雜.本文在不影響系統模型精度的情況下,采用泰勒展開的方式對連續地月載荷轉移系統(continuous cislunar payload transfer system, CCPTS)的勢能進行了相應簡化.首先,在考慮系繩柔性之后,對比分析系繩柔性對CCPTS的軌道參數、姿態參數的影響;其次,通過對柔性模型與剛性桿模型的對比分析,揭示重力梯度力矩的存在以及對CCPTS姿態及軌道參數的影響; 最后,分析系繩初始旋轉角速度、系繩長度對系繩縱向、橫向振動量的影響.通過設置不同的系繩初始旋轉角速度以及不同的系繩長度,對比分析系繩初始旋轉角速度以及系繩長度對系繩橫向、縱向振型函數的振動幅值、振動周期的影響.
1 連續地月物質轉移系統概念
本文所研究的連續地月物質轉移系統(簡稱CCPTS)包括兩套長期駐軌的子系統,一套子系統運行于地球某橢圓軌道上,稱為駐地載荷轉移系統;另一套子系統運行于月球某橢圓軌道上,稱為駐月載荷轉移系統.兩套系統工作原理相似,如圖1所示給出了CCPTS的示意圖.
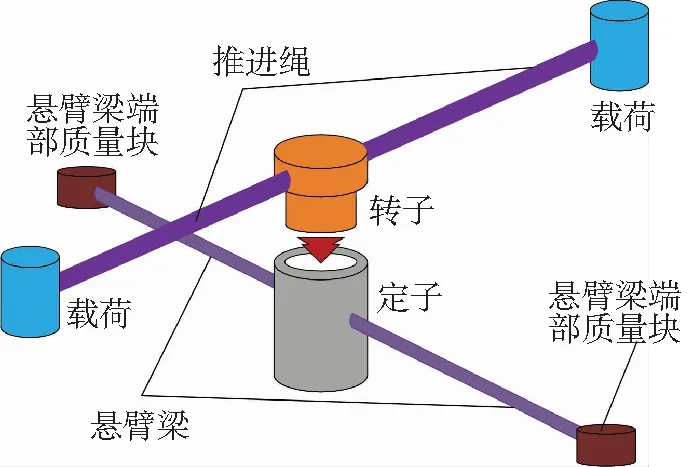
圖1 CCPTS示意[3]

同理,處于月球軌道的轉移系統—Lunavator的工作機制類似于CCPTS,不同的是,當Lunavator運行到其軌道近月點時,母星兩端的系繩的長度剛好等于此時的近月點高度,其作用是方便地將載荷放置在月球表面或從月球表面抓取載荷.
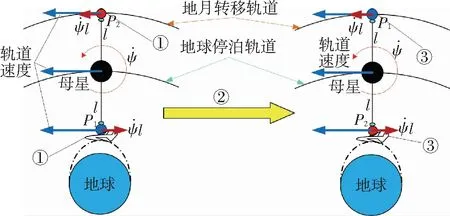
圖2 CCPTS進行載荷轉移過程示意
2 連續地月轉移系統二維柔性動力學模型
2.1 坐標系定義
在進行動力學模型建立之前,需要定義如下幾個坐標系:
1)慣性坐標系OEXYZ.坐標原點OE為地球質心,OEX軸指向春分點,OEY軸位于地球赤道面內并垂直于OEX,OEZ軸與OEX軸、OEY軸構成右手系并指向地球北極,3個軸方向上的單位矢量分別為I、J及K.
2)軌道坐標系OMxoyozo.原點定義在CCPTS質心OM處,OMxo軸位于軌道面內,由地心指向CCPTS質心方向,OMyo軸垂直于OMxo并位于軌道平面內,OMzo與OMxo、OMyo構成右手坐標系,3個軸方向上的單位矢量分別為ro、θo及no;慣性系與運動系如圖3所示.圖3中ω為近地點幅角,θ為真近角,Ω為升交點赤經.
4)體軸坐標系OMxbybzb.OMxb由低軌載荷(lowerpayload)指向高軌載荷(upperpayload),OMyb位于軌道面內,垂直于OMxb,OMzb軸與OMxb、OMyb構成右手坐標系.3個軸方向上的單位矢量分別為ib、jb及kb;軌道面坐標系與體軸系的幾何關系如圖4所示,圖4中R為母星矢徑,ψ為俯仰角,OM為母星.
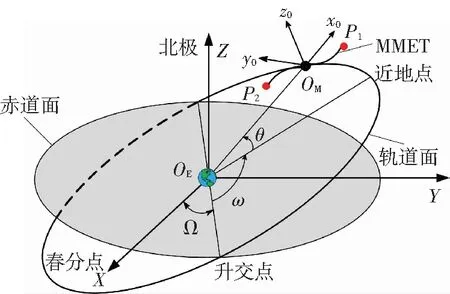
圖3 慣性坐標系與軌道坐標系
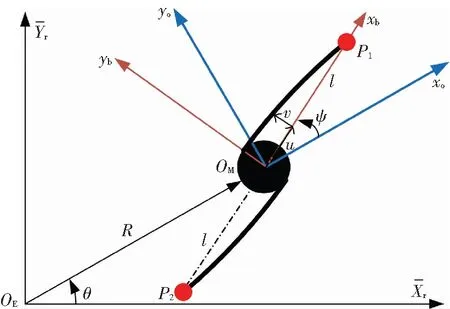
圖4 CCPTS在軌道面坐標系下的示意
2.2 動力學模型
CCPTS質心運行在以地球為中心的橢圓軌道上,半長軸為a,離心率為e,軌道傾角為i,并對系統做出如下假設:
1)系繩旋轉面與軌道面夾角為零;
2)忽略第三體引力以及地球扁率等擾動因素對系統的影響.
假設系繩距母星任意一點x處由于系繩柔性而產生的形變在體軸系下的分量為:xb方向(即縱向)形變為u(x,t),yb方向(即橫向)形變為v(x,t).系繩形變在體坐標系下的相對位置關系,如圖5所示.

圖5 系繩形變在體坐標系下相對位置關系
由于系繩縱向與橫向形變均可以表達為時間與空間的函數,因此由Bubnov-Galerkin方法,在一階模態近似情況下,得到系繩的縱向與橫向形變為[9]
(1)
(2)
式中,q1(t)、q2(t)分別為系繩縱向、橫向振型函數.
由圖4可以得到載荷P1、P2在軌道面坐標系中的坐標分量表達式為
(3)
(4)
(5)
(6)
母星在軌道面坐標系下的分量可以表示成
(7)
(8)
為了求得變形繩在軌道面坐標系下的坐標分量,先將體坐標系分量(x+u,v,0)通過坐標變換轉到與軌道面坐標系平行的坐標系OMX′Y′中,得
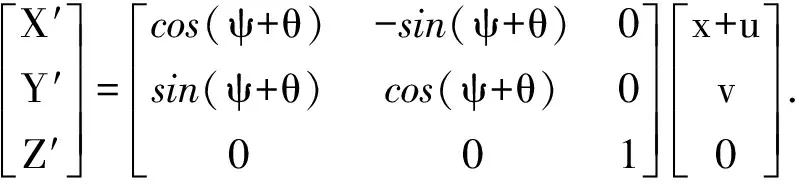
然后將坐標系OMX′Y′的原點平移到地心,得到軌道面坐標系中的變形繩的坐標分量:
(9)
(10)
(11)
(12)
2.2.1 CCPTS的平動動能
CCPTS的平動動能,由動力學知識,系統平動動能Ttrans的表達式可以表示為

式中:mM為母星質量;mP為載荷質量;ρ為系繩質量密度;A為系繩橫截面積.
二維模型中,系統的轉動動能Trot的表達式為
式中:Iz為CCPTS相對于z軸的轉動慣量;ωz為相對于z軸的轉動角速度.假設載荷P1、P2、母星OM以及系繩T1、T2均為圓柱體,各自的尺寸半徑為(rP,rM,rT),載荷及母星的尺寸高度為(hP,hM),由此得到CCPTS轉動動能為
其中,
聯立式(3)~(8)得到CCPTS載荷與母星的動能表達式為
(13)
式中IPM為載荷P1、P2以及母星OM關于CCPTS質心的轉動慣量,其具體表達式為
結合式(9)~(12),得系繩的平動和轉動動能為

(14)

2.2.2CCPTS勢能
由于系統由母星、系繩及載荷組成,且考慮系繩存在彈性變形,因此,系統勢能除重力勢能之外還包括系繩形變產生的彈性勢能.在滿足動力學研究的前提下,為了簡化分析,略去x/R、l/R二次以上的項,由圖4可以得到系統的重力勢能為
(15)
式中:m=mM+2mP+2ρAl,表示CCPTS總質量,μ為地球引力場數.同時,由系繩的彈性形變產生的彈性勢能為
(16)
式中,εT為系繩總應變.系繩拉力T與系繩彈性模量E、系繩橫截面積A以及應變εE存在如下關系:
(17)
式中,T0為系繩不受外力(重力之外的力)情況下,來自于CCPTS離心力作用在系繩上的拉力,εE表示系繩的形變導致的實際應力,各自的表達式為
(18)
(19)
式中,“u′、v′”分別為“u、v”對x的導數.
聯立式(1)~(2)、(16)~(19)得到兩系繩總的彈性勢能為


(20)

采用Lagrange方法建立CCPTS柔性動力學模型.選擇(R,θ,ψ,q1,q2)作為系統廣義坐標,相應的廣義力為(0,0,τ,0,0),由拉格朗日函數,可得
得到以下二維柔性動力學方程:





3 動力學仿真分析
3.1 仿真初始條件
系統參數見表1,仿真時間取為60 000 s.

表1 CCPTS參數
仿真初始條件及各廣義坐標初值如下:


3.2 動力學仿真分析
圖6給出了不同外力矩作用下,CCPTS的二維柔性模型與二維剛性模型的矢徑偏差ΔR隨時間的變化關系.由圖6可知,當外力矩τ=0時,由于系繩柔性所造成的母星質心偏差的變化幅值隨時間逐漸增加.此外,隨著外力矩的增加,ΔR的幅值也隨之線性增加,說明CCPTS的姿態運動與軌道運動存在一定程度的耦合作用.
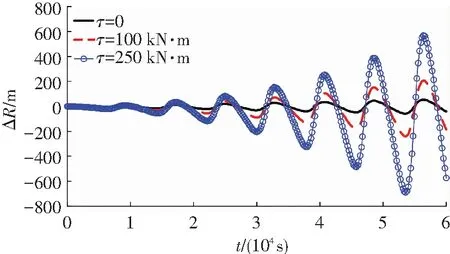
圖6 CCPTS母星質心矢徑偏差ΔR時間變化關系
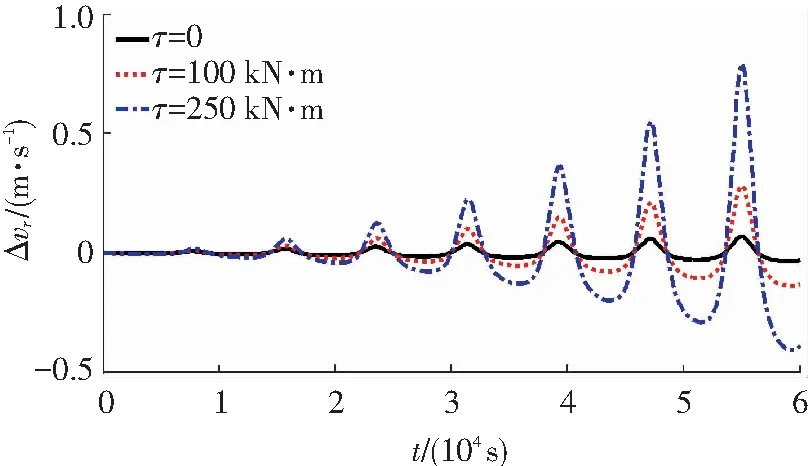
圖7 母星徑向速度偏差隨時間變化關系
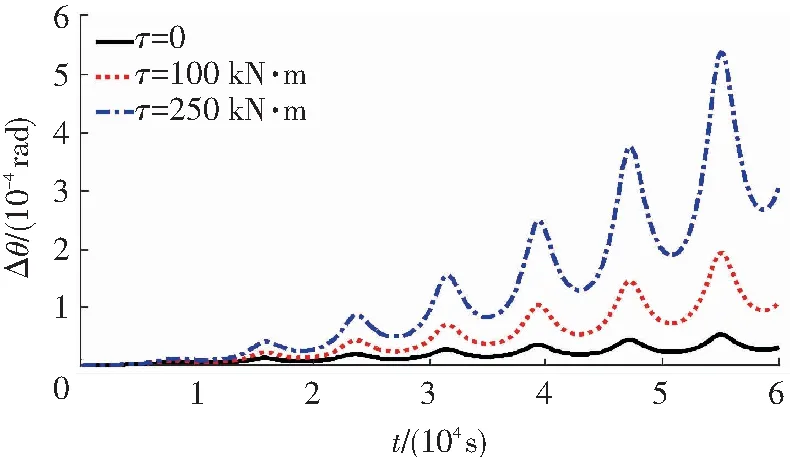
圖8 CCPTS真近角偏差Δθ隨時間變化關系
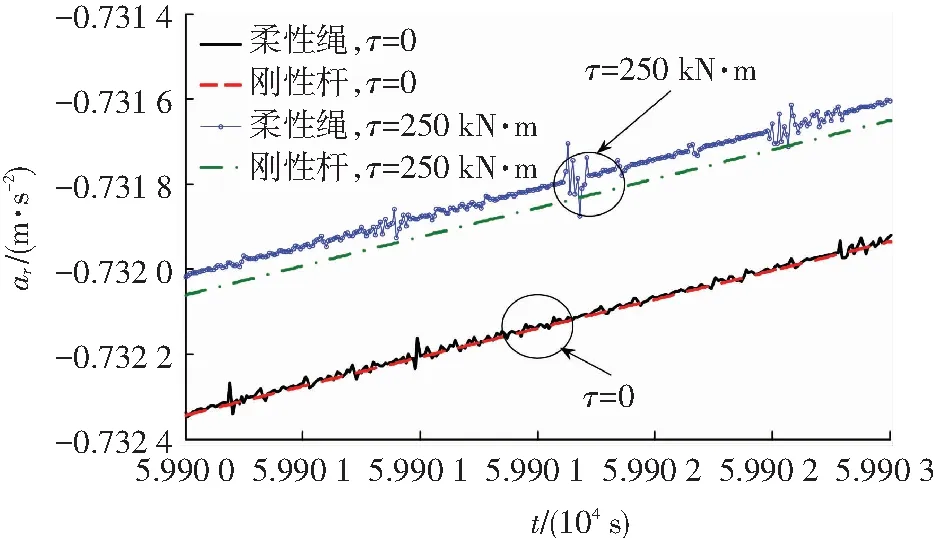
圖9 CCPTS質心徑向加速度隨時間變化關系
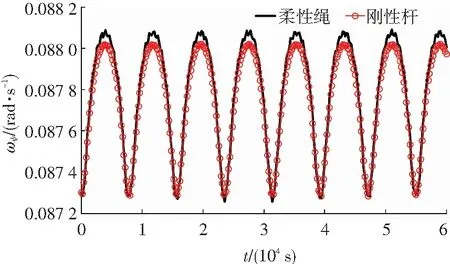
圖10 τ=0,系繩俯仰角速度ωψ隨時間變化關系
Fig.10 Time history of pitch angular velocityωψof tether withτ=0
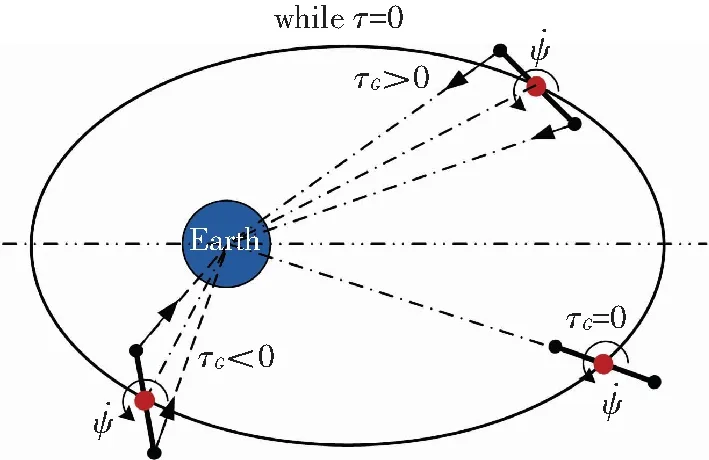
圖11 不同外力矩對系繩俯仰角速度的影響重力梯度力矩在軌道不同位置、不同姿態所對應的正負關系
Fig.11 The positive and negative relationship of the gravity gradient torque with different position and different attitude in the parking orbit
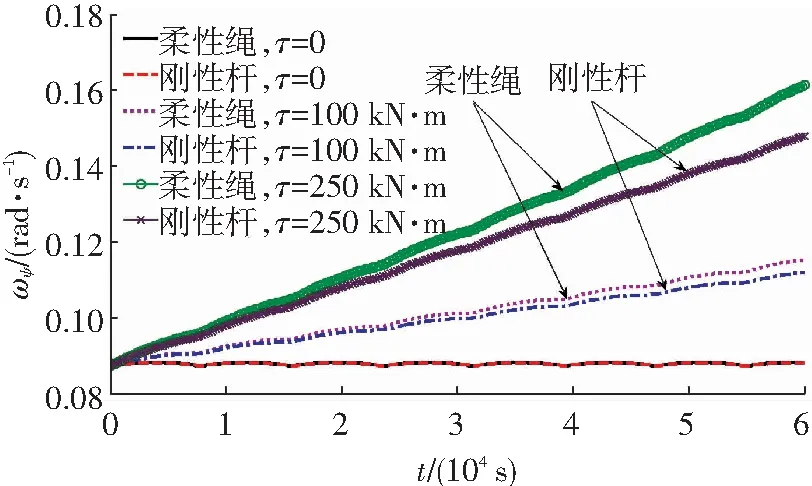
圖12 不同外力矩對系繩俯仰角速度的影響
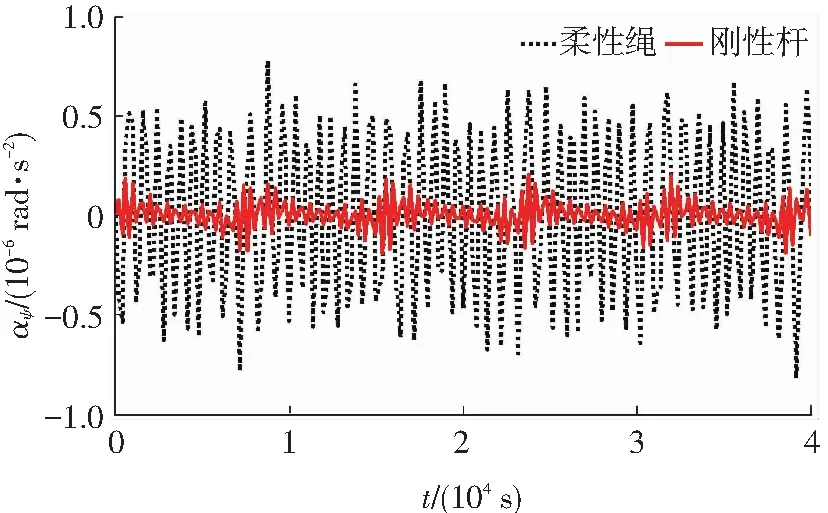
圖13 τ=0,CCPTS系繩俯仰角加速度隨時間變化關系

圖14、15給出了τ=0、τ≠0兩種情況下系繩縱向振動量q1(x)隨時間的變化關系.由圖14可知,當外力矩為零時,系繩縱向振形函數q1(x)隨時間呈現周期性變化關系,縱向最大振動量為8.683 m,振蕩周期為4 400 s(對應的振蕩頻率為2.272 7×10-4/s).由圖15可以看出,當外力矩不為零時,系繩縱向振動函數q1(x)的振動幅值隨時間逐漸增加,而且振蕩周期逐漸減小,振蕩頻率逐漸增加,外力矩越大,縱向振動量增加越快.
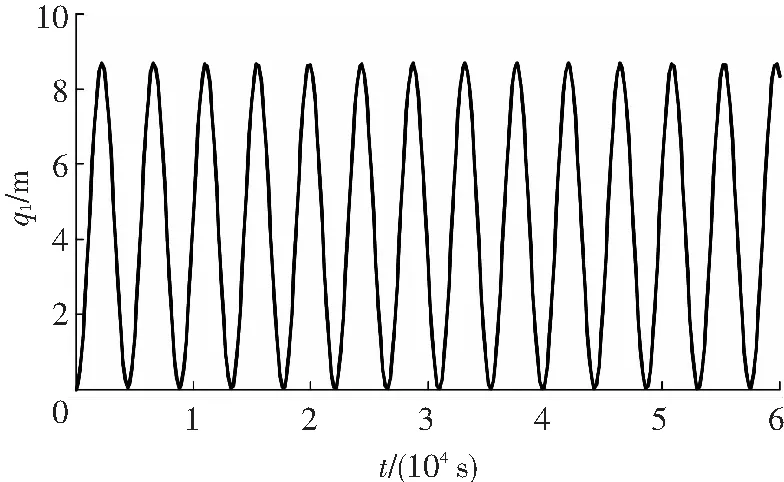
圖14 τ=0,CCPTS系繩縱向振動量q1隨時間變化關系
Fig.14 Time history of tether’s longitudinal vibration displacementq1withτ=0
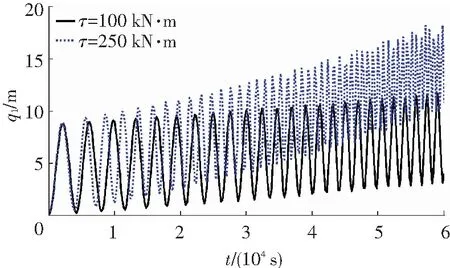
圖15 τ≠0,CCPTS系繩縱向振動量q1隨時間變化關系
Fig.15 Time history of tether’s longitudinal vibration displacementq1withτ≠0
圖16、17給出了不同外力矩作用下,系繩橫向振型函數(或橫向振動量)q2隨時間的變化關系.由圖16可知,當外力矩為零時,系繩橫向振型函數q2隨時間進行周期性振蕩,振蕩幅值介于[-2.144,2.103]m之間.當外力矩不為零時,系繩橫向振動函數不再隨時間呈周期性變化關系,振蕩幅值隨時間呈現小幅衰減趨勢.
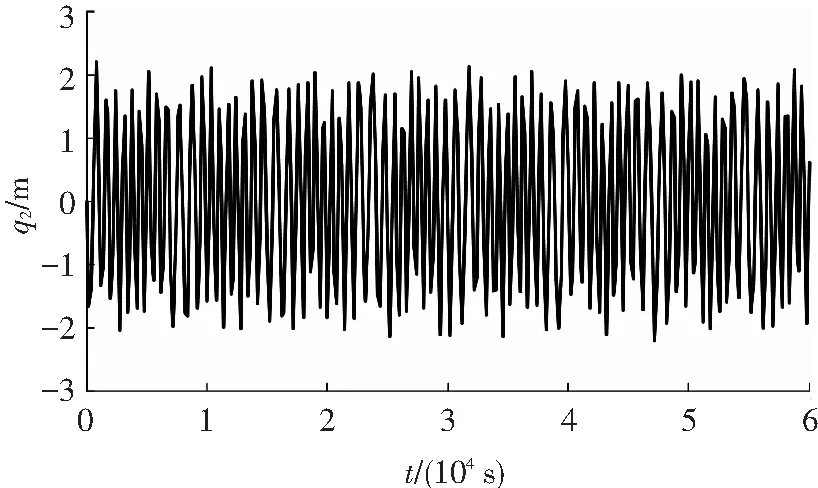
圖16 τ=0,CCPTS系繩橫向振動量q2隨時間變化關系
Fig.16 Time history of tether’s transverse vibration displacementq2withτ=0

圖17 τ≠0,CCPTS系繩橫向振動量q2隨時間變化關系
Fig.17 Time history of tether’s transverse vibration displacementq2withτ≠0
表2 系繩初始俯仰角速度對系繩縱向、橫向振動量的影響
Tab.2 Relations between the magnitudes of tether’s longitudinal and transverse vibration displacements and initial pitch angular velocity
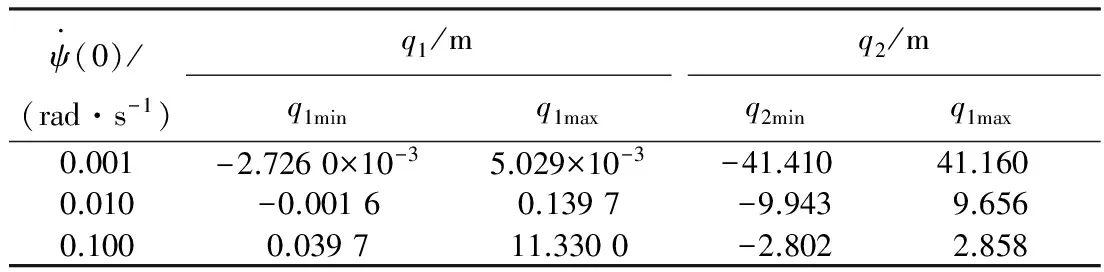
ψ·(0)/(rad·s-1)q1/mq2/mq1minq1maxq2minq1max0.001-2.7260×10-35.029×10-3-41.41041.1600.010-0.00160.1397-9.9439.6560.1000.039711.3300-2.8022.858
表3給出了不同系繩長度與系繩縱向、橫向振動幅值的關系.由表3可知,隨著系繩長度的增加,系繩縱向、橫向振動幅值均非線性增加.由此說明,系繩的長度對系繩的穩定性影響明顯.
4 結 論
1)系繩的柔性對軌道參數R、θ有一定的影響,同時外力矩的大小也將改變系繩柔性對CCPTS軌道、姿態參數的影響程度.由于系繩縱向、橫向振動方向與母星徑向加速度方向往復變化,母星徑向加速度、真近角加速度出現“毛刺”現象.
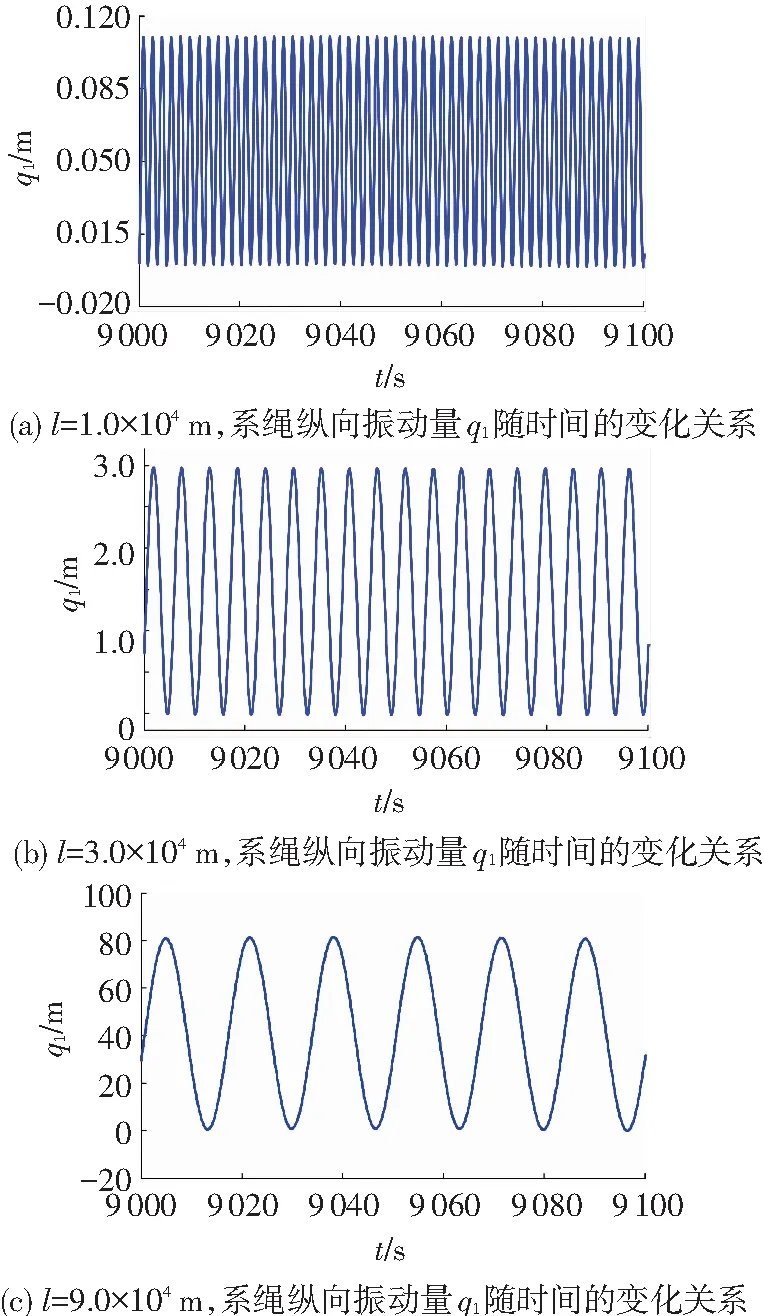
圖18 不同系繩長度對系繩縱向振動量q1的影響
Fig.18 Impact of different tether length on tether’s longitudinal vibration displacementq1
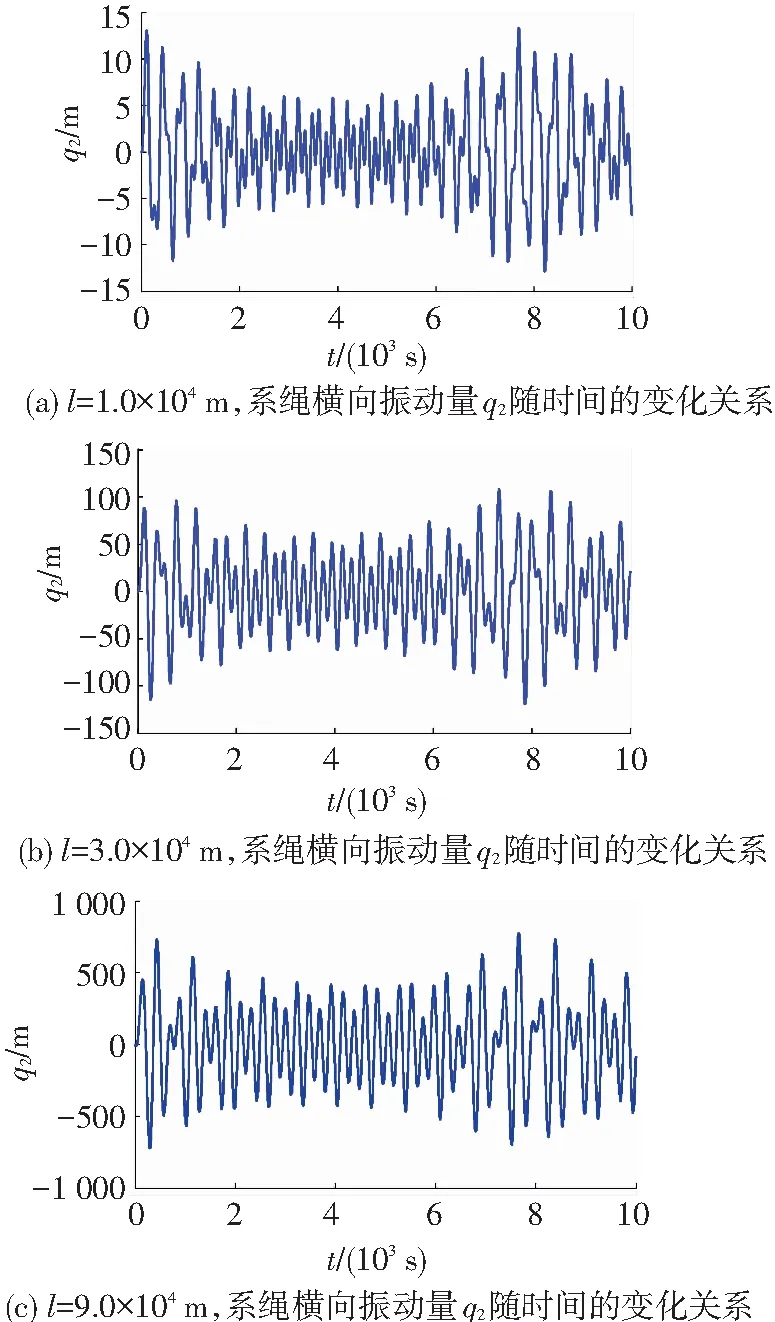
圖19 不同系繩長度對系繩橫向振動量q2的影響
Fig.19 Impact of different tether length on tether’s transverse vibration displacementq2
表3 系繩長度對系繩縱向、橫向振動量的影響
Tab.3 Relations between the magnitudes of tether’s longitudinal and transverse vibration displacements and tether length
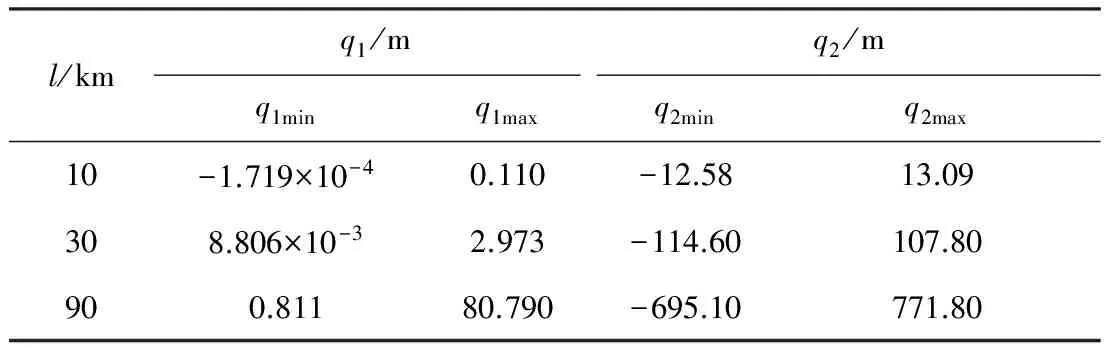
l/kmq1/mq2/mq1minq1maxq2minq2max10-1.719×10-40.110-12.5813.09308.806×10-32.973-114.60107.80900.81180.790-695.10771.80
2)由于系繩長度不可忽略,因此,CCPTS存在重力梯度力矩,并且對系繩的旋轉運動產生了一定程度的影響,相比于重力梯度力矩對剛性桿模型的影響,該影響對柔性繩較大.
3)系繩初始角速度以及系繩長度對系繩縱向、橫向振動量均產生了較大影響.隨著系繩初始旋轉角速度的增加,系繩縱向振動量急劇增加、振動周期縮短,系繩橫向振動量幅值逐漸減小、振動周期亦縮短;系繩長度的增加導致了系繩縱向、橫向振動幅值的非線性指數增加,系繩縱向振動周期近似等比例增加,橫向周期增加不明顯.
[1] ROBERT P H. Chauncey U. Cislunar tether transport system[J]. Journal of Spacecraft and Rockets, 2000, 37(2): 177-186. DOI: 10.2514/2.3564.
[2] ROBERTP H. Commercial development of a tether transport system[C]// 36th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit. Huntsville, AL: AIAA, 2000. DOI: 10.2514/6.2000-3842.
[3] CARTMELL M P. Generating velocity increments by means of a spinning motorised tether[C]//34th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit. Cleveland, OH: AIAA, 1998. DOI:10.2514/6.1998-3739.
[4] CARTMELLM P, MCKENZIE D J. A review of space tether research [J]. Progress in Aerospace Science, 2008, 44(1):1-21. DOI: 10.1016/j.paerosci.2007.08.002.
[5] ZIEGLER S W. The rigid body dynamic of tethers in space [D]. UK: University of Glasgow, 2003.
[6] ZIEGLERS W, CARTMELL M P. Using motorized tethers for payload orbital transfer [J]. Journal of Spacecraft and Rockets, 2001, 38(6): 904-913.
[7] CHEN Yi. Dynamical modelling of a flexible motorised momentum exchange tether and hybrid fuzzy sliding mode control for spin-up [D]. Glasgow: University of Glasgow, 2010.
[8] CHEN Yi, CARTMELL M P. Hybrid fuzzy sliding mode control for motorised space tether spin-up when coupled with axial and torsional oscillation [J]. Astrophys and Space Science, 2010, 326(1): 105-118. DOI: 10.1007/s10509-009-0212-6.
[9] ISMAIL N A. The dynamics of a flexible Motorised Momentum Exchange Tether (MMET) [D]. UK: University of Glasgow, 2012.
[10]MURRAY C. Continuous Earth-moon payload exchange using motorized tethers with associated dynamics[D]. UK: University of Glasgow, 2011.
[11]MURRAY C, CARTMELL M P. Moon-tracking orbits using motorized tethers for continuous Earth-moon payload exchanges[J]. Journal of Guidance, Control and Dynamics, 2013, 36(2): 567-576. DOI: 10.2514/1.56248.
[12]陽勇,齊乃明,黃盤興,等. 連續地月轉移系統動力學研究與能量分析[J]. 航空學報,2015, 36(6): 2005-2015. DOI: 10.7527/S1000-6893.2015.0061.
YANG Yong, QI Naiming, HUANG Panxing, et al. Dynamics and energy analysis of continuous cislunar transfer system[J]. Acta Aeronautica ET Astronautica Sinica, 2015, 36(6): 2005-2015. DOI: 10.7527/S1000-6893.2015.0061.
[13]QI Naiming, YANG Yong, ZHAO Jun, et al. Effects of asymmetries on the dynamics of motorized momentum exchange tether and payloads injection precision [D]. [S.l.]: International Journal of Aerospace Engineering, 2015: 1-13. DOI: 10.1155/2015/468482.
[14]齊乃明,陽勇,黃盤興,等. 結構偏差對二維連續地月載荷轉移系統動力學影響[J]. 北京航空航天大學學報,2015, 41(11): 2000-2009. DOI: 10.13700/j.bh.1001-5965.2014.0730.
QI Naiming, YANG Yong, HUANG Panxing, et al. Two dimensional dynamics of continuous cislunar payload transfer system considering structural deviation effect[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(11): 2000-2009. DOI: 10.13700/j.bh.1001-5965.2014.0730.
[15]YANG Yong, QI Naiming, LIU Yanfang, et al. Influence of tapered tether on cislunar payload transmission system and energy analysis[J]. Aerospace Science and Technology, 2015, 46: 210-220. DOI: 10.1016/j.ast.2015.07.004.
[16]劉暾,趙鈞. 空間飛行器動力學[M]. 哈爾濱:哈爾濱工業大學出版社, 2003.
(編輯 張 紅)
The 2D flexible dynamic model and analysis of continuous cislunar transfer system
QI Naiming, YANG Yong, ZHAO Jun, SUN Qilong, LIN Haiqi
(School of Astronautics,Harbin Institute of Technology,Harbin 150001,China)
In order to analyze the impact of tether flexibility on the dynamics of CCPTS (Continuous Cislunar Payloads Transfer System) the 2D flexible dynamics of CCPTS is built by using Lagrange method and the numerical simulations are presented. Firstly, the comparison analyses between the 2D flexible model and the 2D rigid model show that the flexibility of the tether affects the orbital elements and attitude elements of CCPTS, and makes these elements of CCPTS out-of-step and increases with increasing time. The chief satellite’s radial acceleration and true anomaly angular acceleration produce some burr due to the flexibility of the tether. The gravity gradient torque caused by the tether affects the CCPTS differently. The angular velocity of tether by the gravity gradient torque regularly varies with time when external torque is zero. However, the angular velocity increases linearly with time while external torque is nonzero and the increasing speed is decided by the magnitude of the external torque. Moreover, the transverse vibration and longitudinal vibration of the tether are affected by the variations of the initial tether angular velocity and tether length.
momentum exchange;cislunar transfer; tethered satellite;flexible;dynamics
10.11918/j.issn.0367-6234.2016.10.008
2015-06-12
CAST重點創新基金(CAST20090801)
齊乃明(1962—),男,教授,博士生導師
陽 勇,yangyong_hit@hit.edu.cn
V476.3
A
0367-6234(2016)10-0057-09
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00