楔形舵片失速特性的數值模擬和水洞試驗
2016-11-17 05:34:41黨建軍李代金
哈爾濱工業大學學報 2016年10期
黃 闖,黨建軍,羅 凱,李代金
(西北工業大學 航海學院,西安 710072)
?
楔形舵片失速特性的數值模擬和水洞試驗
黃 闖,黨建軍,羅 凱,李代金
(西北工業大學 航海學院,西安 710072)
為獲得楔形超空化舵片在大舵角情況下的失速特性并探究其失速機理,針對采用24°楔形舵片作為艉控制面的超空泡航行體在低速通氣條件下的繞流問題,分別構建三維數值模型和水洞試驗系統,同時采用數值模擬和水洞試驗兩種手段研究楔形舵片的升/阻力特性和低壓面空化情況隨舵角的變化關系.研究結果表明:提出的數值方法和試驗方案是合理的;楔形舵片的阻力系數在0°~5°舵角變化的影響較小,升力系數在0°~8°和9°~12°舵角范圍內均具有良好的線性度,但后者斜率遠小于前者;楔形舵片在舵角超過8°時升力系數突然減小并發生失速現象,舵片低壓面發生空化并被空泡覆蓋;低壓面因空化致使壓力不能進一步降低是導致舵片發生失速的根本原因,對于24°楔形舵片的許用舵角范圍不應超過8°.
楔形舵片;數值模擬;水洞試驗;空化;失速;許用舵角
超高速航行器憑借其獨特的流體動力布局模式將大部分殼體包裹于超空泡內部,進而實現航行阻力的大幅減小,配合強大的推進裝置可以實現水下200 kn以上的超高航速[1].然而,因超空泡的存在超高速航行器表現出的流體動力特性以及對控制系統的響應與常規水下航行器有很大的不同,因此控制和機動問題是超高速航行技術的研究重點和難點,同時也是當前的研究熱點[2-4].在水下超高速航行條件下,常規翼型往往因空化導致舵效喪失或不可預測,為此超高速航行器多采用截面為24°銳角等腰三角形的楔形三棱柱舵片[5-7].
楔形舵片被廣泛用作超高速水下航行器的控制面,具有舵效穩定、鉸鏈力矩小、空化性能穩定等諸多優點[8-9].劉海軍等[5]采用CFD的方法研究了楔形角對舵片流體動力特性的影響規律,指出較大的楔角會導致舵片阻力增加.王京華等[10]采用楔形尾舵作為控制面,通過舵片沾濕面積考慮舵效率,研究了超空泡航行體的動力學建模和控制問題.Zheng等[11]采用數值模擬的方法,研究了楔形物體的空化問題,得出了楔形物體阻力特性和空化特性與楔角的關系.Dzieiski 等[12]提出了楔形舵片在與空泡耦合時的流體動力預測方法,并基于此研究了超空泡航行器的控制技術.從國內外公開文獻來看,超空泡航行技術的研究主要集中在動力學建模和運動控制等方面,楔形舵片被廣泛用作超空泡航行體的控制面,關于其流體動力特性和空化特性的研究很少,對楔形舵片的失速特性等方面的研究尚未開展.
楔形舵片的失速現象將改變舵片的空化規律和流體動力特性,研究楔形舵片的失速規律和失速機理有助于建立精準的控制模型,并且改善超空泡航行器的運動特性.考慮到開展高速超空化試驗的困難,本文基于低速通氣工況,針對24°楔形舵片分別開展水洞試驗和數值模擬研究,旨在證明楔形舵片存在失速特性,揭示舵片失速的機理,提出能夠準確預測楔形舵片失速特性的數值方法,為研究楔形舵片在高速航行工況下的失速特性奠定基礎.
1 數值模擬
1.1 數值模型的建立
1.1.1 控制方程
超空化流動數值模型的控制方程包括氣液兩相的連續方程、動量方程和湍流方程.根據文獻[13-14]的研究成果,本文研究內容均屬于勻相流問題,可采用Mixture多相流模型;湍流控制方程采用穩定性更高的Realizablek-e湍流模型,該模型穩健性好,適用于解決復雜的流動問題;湍流模擬中近壁面處理方法可采用穩健性更好的尺度化壁面函數.
1.1.2 模型的簡化以及網格的劃分
本文的研究對象是24°楔形三棱柱舵片,舵片的弦長D=21.5 mm,舵片的展長L=30 mm,數值模擬研究的主要目的是獲得不同舵角工況下楔形舵片的流體動力特性以及附近流場的空化特性.為突出研究重點,簡化數值模型,在幾何建模時不考慮彈體和主體空泡對流場的影響,在尾舵完全穿刺空泡的情況下模擬器空化流場.
某型超高速航行器的楔形舵片的最大厚度約8 mm,而航行體圓柱段直徑約220 mm,因此弧形殼體可以按照平壁面進行簡化處理;文獻[12, 15]指出在尾舵存在空泡不完全穿刺的條件下,可根據有效沾濕面積計算舵片的流體動力.因此,本文通過對合理簡化的模型開展數值模擬,研究完全穿刺空泡時的楔形舵片的流體動力特性是可行的.
針對所建立的楔形空化舵片的數值計算模型,采用GAMBIT軟件劃分結構化網格,在近壁面添加邊界層,并基于湍流模型對y+的要求優化近壁面網格,以便精確地模擬湍流;在舵片周圍以及舵片后部的尾流區劃分足夠精細的網格,以便準確地捕捉空化泡;通過網格無關性檢驗,保證空泡形態和流體動力的數值模擬結果不受網格分布規律的影響.
按照上述的模型簡化方法和網格劃分原則,以1°為間隔建立0°~12°舵角工況下尾舵流場的幾何模型并劃分網格,每個模型的網格單元數為82萬.以0°工況為例,楔形舵片周圍的結構化網格分布情況如圖1所示.

圖1 楔形舵片周圍的網格劃分情況
1.1.3 邊界條件設置
邊界條件設置如下:計算域采用速度進口,流速10 m/s;計算域采用壓力出口,絕對壓力90 kPa;通氣口采用質量流量進口,以維持舵后空泡穩定所需的最小通氣量作為最終通氣量,計算使用的通氣量為32 g/min,不考慮氣體可壓縮性約合26S LPM;采用通氣空化模型考慮相變,模擬超空泡的生成和發展,數值模型的計算域構建及邊界條件設置情況如圖2所示.
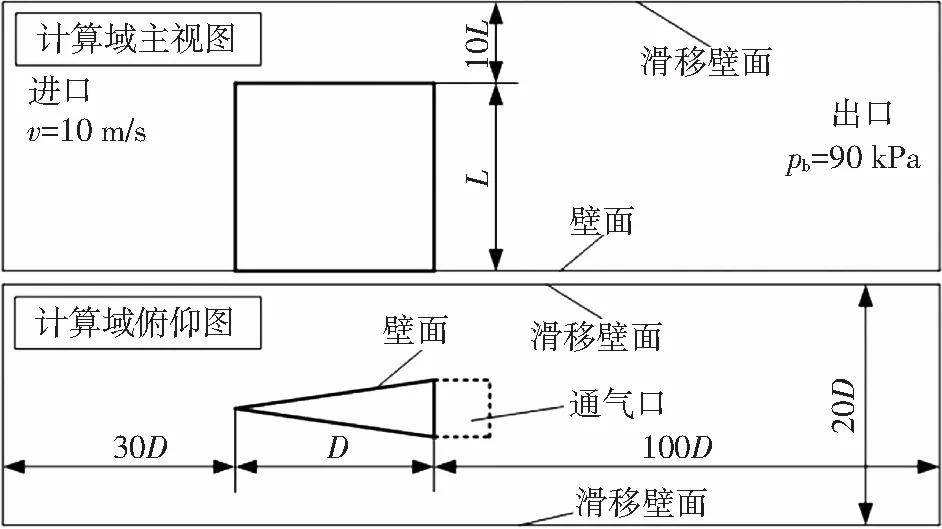
圖2 計算域構建及邊界條件設置
1.2 舵片流體動力特性數值模擬結果
根據楔形舵片在0°~12°舵角工況下的數值模擬結果,得出楔形舵片在低速通氣工況下的流體動力特性.為便于分析,以尾舵縱剖面面積為參考面積、來流速度為參考速度、水的密度為參考密度對流體動力數據進行無量綱化.楔形超空化舵片在不同舵角下的升力系數和阻力系數見表1.
表1顯示,楔形舵片在低速通氣工況下,阻力系數在0°~5°舵角范圍幾乎保持恒定,在5°~12°范圍隨舵角的增加而略微增大;升力系數在0°~8°范圍內與舵角正相關,超過8°以后舵片則突然變小,并且在9°~12°范圍內升力系數仍與舵角正相關,但數值僅維持在5°~6°舵角時的水平.基于此,認為楔形超空化舵片在8°舵角以后,舵片的舵效突然變小,出現失速現象.因此,為保證控制效果,該類舵片的許用舵角不得超過8°.
表1 楔形舵片流體動力特性的數值模擬結果
Tab.1 The numerical results of hydrodynamic characteristic of wedge rudder
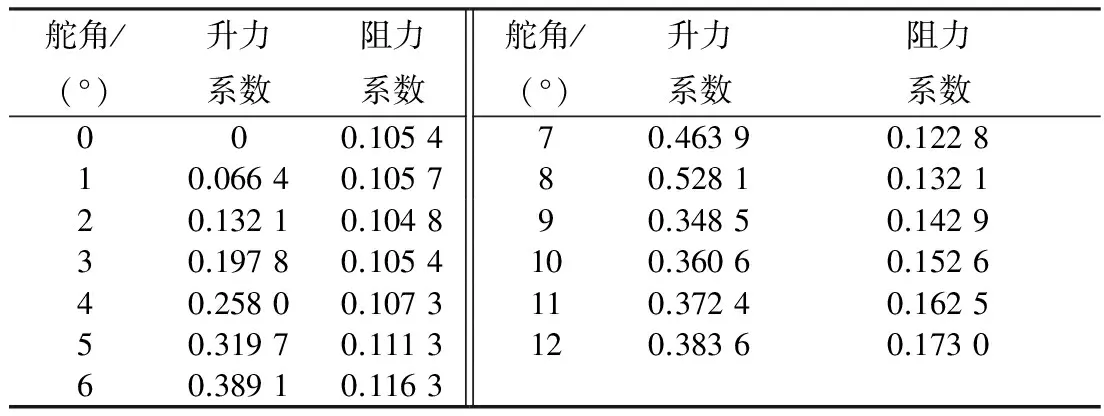
舵角/(°)升力系數阻力系數舵角/(°)升力系數阻力系數000.105470.46390.122810.06640.105780.52810.132120.13210.104890.34850.142930.19780.1054100.36060.152640.25800.1073110.37240.162550.31970.1113120.38360.173060.38910.1163
1.3 舵片空化特性的數值模擬結果
根據數值模擬結果,統計并對比不同舵角時楔形舵片周圍流場的空化情況,揭示楔形舵片的失速機理.為便于觀察,以舵片中截面流場的氣相體積分數云圖表征舵片低壓面的空化情況.0°~12°舵角舵片中截面的氣相分布分別如圖3所示.部分工況的三維空泡外形如圖4所示.
圖3顯示了舵片低壓面的空化情況隨舵角的變化情況,可以發現舵角在0°~8°時空泡僅出現在楔形舵片之后且清晰穩定;舵角在9°~12°時楔形舵片的低壓面發生空化并被空泡完全包裹.結合圖3可知,大舵角時低壓面的空化是導致楔形舵片失速的主要原因.
圖4所示為0°、5°、9°和12°舵角工況時舵片后部的超空泡三維圖,可知,大舵角工況下,舵片低壓面發生空化并且完全被空泡包裹,空泡尺度也有所增大.

圖3 不同舵角時楔形舵片低壓面的空化情況

圖4 不同舵角時的三維空泡形態
Fig.4 The three dimensional shape of cavity under different rudder angle
1.4 壓力分布和速度矢量的數值模擬結果
對比楔形舵片的低壓面發生空化前后流場的壓力分布和速度矢量,進而研究舵片失速的機理.舵角為8°和9°時舵片附近的壓力云圖和速度矢量對比如圖5所示.

圖5 舵面空化前、后的壓力云圖和速度矢量對比
Fig.5 The contrast of pressure distribution and velocity vector of flow field considering cavitation with that of flow field not considering cavitation
圖5顯示,楔形舵片在有舵角的情況下駐點位于迎流面的最前端,駐點的阻滯作用引起部分流體在舵片迎流面發生逆向流動,致使來流與楔形舵片中線的夾角大于實際舵角,進而導致9°舵角工況下低壓面發生空化;低壓面空化后,舵面的壓力分布規律隨之改變,并最終導致舵片的流體動力特性突變,發生失速現象.
2 試 驗
依托西北工業大學的高速水洞實驗室,搭建具有自動操舵及舵角控制功能的試驗系統,研究超高速水下航行器的楔形空化舵片的流體動力特性和空化特性,揭示其失速機理.
2.1 試驗原理及試驗條件
2.1.1 試驗原理
通過調節水洞的壓力、水速和通氣流量,生成穩定透明的超空泡.
由伺服電機、滾珠絲杠和精密位置傳感器構成的伺服驅動系統精確控制主動液壓缸的行程.兩個完全一樣的液壓缸通過管路并聯構成液壓隨動系統,主動液壓缸由伺服電機驅動位于水洞外,隨動液壓缸通過擺桿推動舵軸轉動實現操舵動作.上位機在水洞外發出舵角指令,通過液壓隨動系統在水洞內實現舵片在0°~12°范圍內的任意角度動作.
通過三分力天平測試舵片受到的流體動力,測力信息經數據線上傳至上位機并存儲;測力天平的一端固定在機架上,另外一端通過連接件與楔形舵片相連接;舵軸與天平連接件之間安裝深溝球軸承.
2.1.2 試驗條件
西北工業大學高速水洞為閉式循環水洞,工作段尺寸為Φ400 mm×2 000 mm;水速為0~18 m/s連續可調;工作壓力為20~300 kPa連續可調;最小空化數為0.15.
試驗所采用的水流速度10 m/s,水洞壓力為90 kPa.模型通氣量為54 SPLM,該通氣量為維持舵后空泡穩定所需的最小通氣量.舵片為24°楔形舵片,展長30 mm,弦長21.5 mm.以1°為間隔,依次給定0°~12°舵角,測試舵片受力,并拍攝流場的空化情況.
2.2 試驗裝置
試驗系統主要由空泡調節子系統、測力子系統和操舵子系統3部分構成.空泡調節子系統以6 bar的壓縮空氣作為氣源,配合水速和壓力調節,生成超空泡;測力子系統采用三分力天平測試舵片的升/阻力;操舵子系統通過伺服電機驅動液壓隨動系統實現舵角控制.
2.2.1 操舵子系統
操舵子系統由伺服驅動系統和液壓隨動系統構成,如圖6所示.上位機發出舵角指令,伺服驅動系統控制主動缸的行程;主動液壓缸與隨動液壓缸同步運動;伺服驅動系統和主動缸位于水洞外,隨動液壓缸安裝于模型內部與多軸相連.
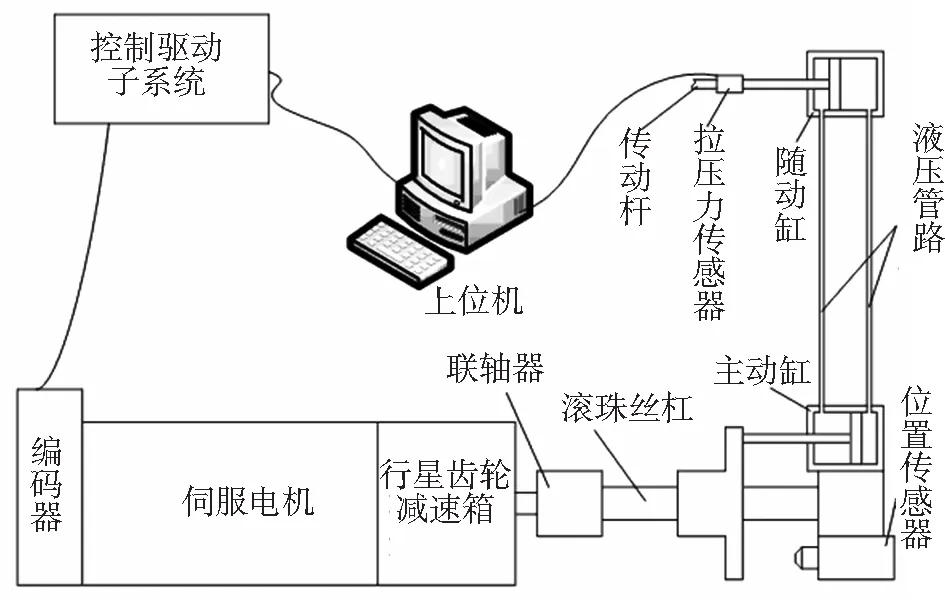
圖6 操舵系統工作原理
2.2.2 試驗模型
如圖7所示,試驗模型主要由隨動液壓缸、測力天平、軟管、舵片空化器、模型殼體以及連接裝置組成,可實現超空泡生成和維持、流體動力測試與儲存以及按給定舵角操舵等功能.試驗模型通過支撐桿固定于水洞上蓋板,如圖8所示.
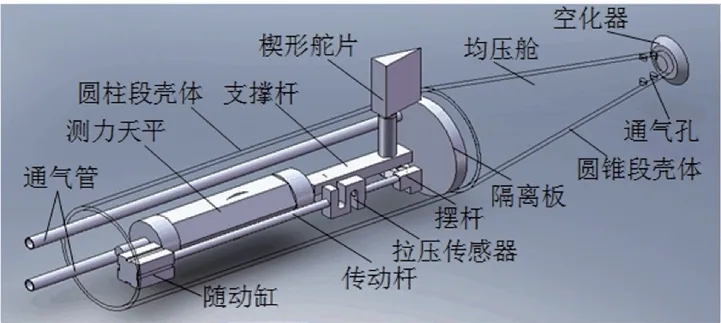
圖7 試驗裝置結構圖

圖8 試驗模型在水洞的安裝方式
2.3 舵片流體動力特性的試驗結果
以1°為間隔針對0°~12°舵角依次開展試驗,分別記錄測力信息和空泡形態.楔形舵片在試驗工況下受到的流體動力見表2,流體動力數據的處理方法同舵片流體動力特性數值模擬結果所述.
表2顯示,在0°~5°舵角范圍舵片的阻力系數幾乎維持穩定;在5°~12°范圍內舵片的阻力系數隨舵角的增加而略微增大;在0°~8°范圍內,舵片升力系數隨舵角的增加而顯著增大;舵角為9°舵片升力系數突然下降至5°時的水平;在9°~12°范圍內,舵片升力系數隨舵角的增加而略微增加,然而舵效遠小于小舵角工況.
表2 楔形舵片流體動力特性的水洞試驗結果
Tab.2 The experimental results of hydrodynamic characteristic of wedge rudder
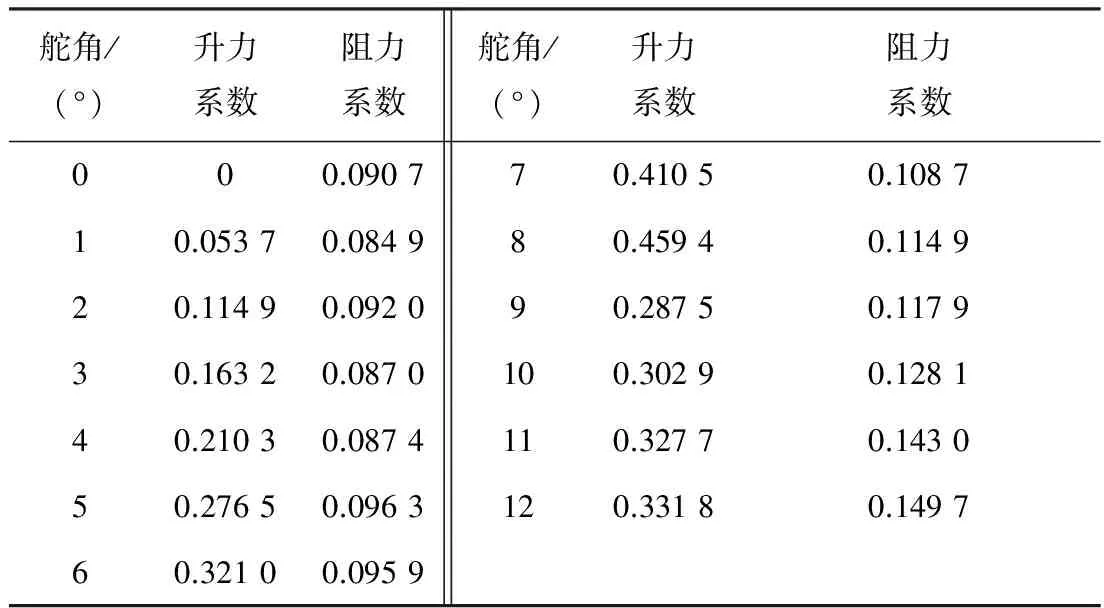
舵角/(°)升力系數阻力系數舵角/(°)升力系數阻力系數000.090770.41050.108710.05370.084980.45940.114920.11490.092090.28750.117930.16320.0870100.30290.128140.21030.0874110.32770.143050.27650.0963120.33180.149760.32100.0959
2.4 舵片空化特性的試驗結果
采用通氣空化的方法開展試驗,在10 m/s的低速工況下獲得足以包裹大部分模型的超空泡,試驗中的模型安裝以及超空泡生成情況如圖9所示.

圖9 試驗中的超空泡
3 結果分析
根據表1,2中的數據,楔形舵片流體動力特性的數值模擬結果和水洞試驗結果的對比如圖10所示.0°~12°不同舵角舵片低壓面的繞流情況對比如圖11所示.
由圖11可知,舵角超過9°時楔形舵片的低壓面發生空化并被空泡覆蓋.楔形舵片的流體動力特性與低壓面的空化特性隨舵角的變化規律吻合,均在舵角超過8°時發生突變.因此,可認為舵片低壓面的空化導致了升力系數的突然減小.

圖10 流體動力特性的數值模擬與水洞試驗結果對比
Fig.10 The comparison of hydrodynamic characteristics drawn by numerical method with those drawn by experimental method
結合圖10、表1,2可知,數值模擬和試驗研究所得楔形舵片的流體動力隨舵角的變化規律一致;試驗結果的升/阻力系數均小于數值模擬結果,相對偏差約在14%~23%之間.對比圖3和圖11可知,數值模擬和試驗研究均得出在舵角超過8°時舵片低壓面開始出現空化現象的結論.
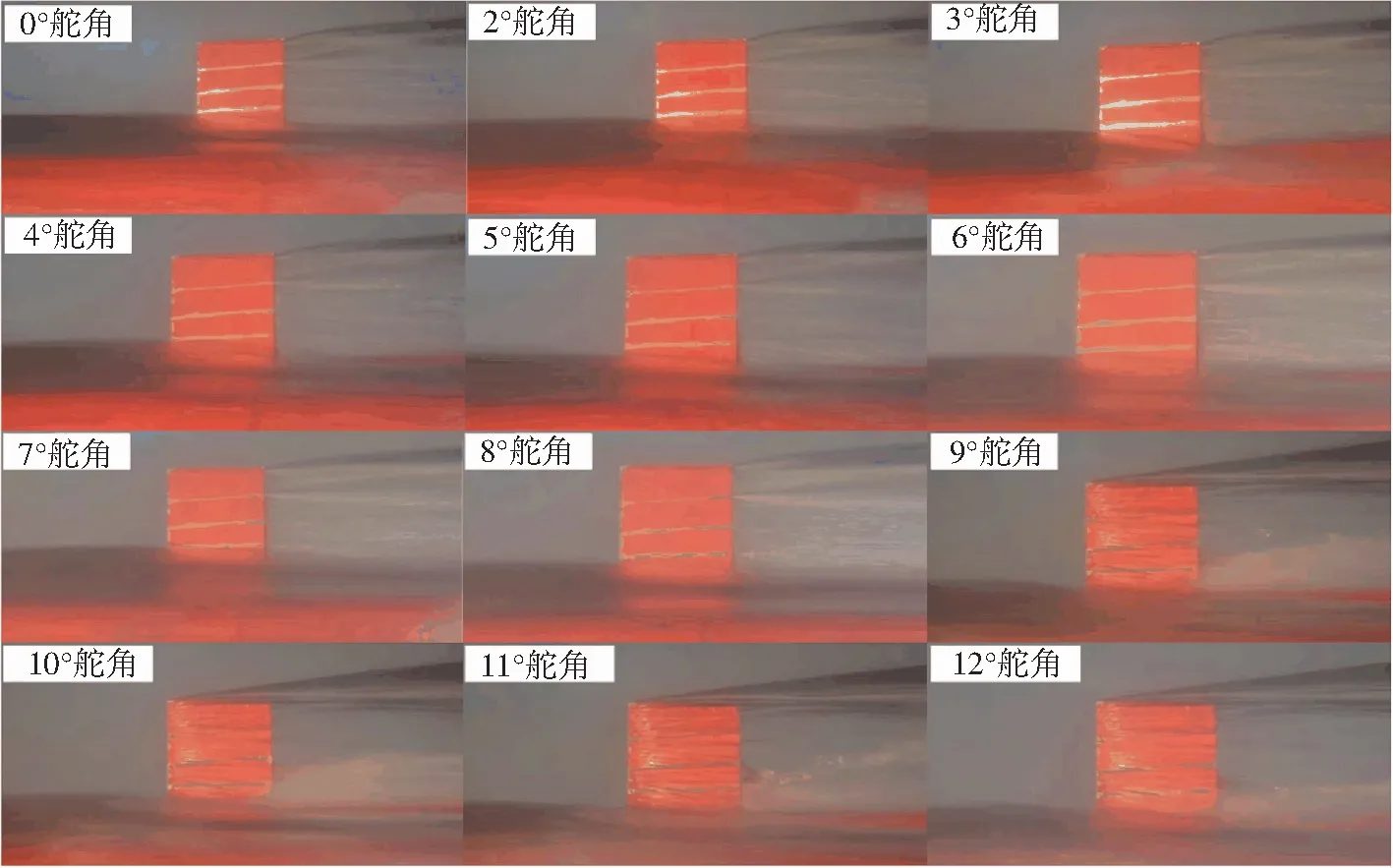
圖11 不同舵角時楔形舵片低壓面的空化特性對比
圖11顯示,由于受主體空泡的影響,不同舵角時楔形舵片根部均有10%左右的面積被空泡包裹,使得楔形舵片的有效沾濕面積減小,并且有可能導致試驗結果偏小.此外,數值模擬模型忽略了通氣工質的可壓縮性,則有可能造成舵片后部空泡的壓力小于試驗狀態,并導致數值模擬結果偏大.根據舵片流體動力特性和流場空化情況的數值模擬以及試驗研究結果可以認為,在舵角超過8°以后,發生在楔形舵片低壓面的空化現象導致舵片表面的壓力被顯著改變,進而導致舵片的流體動力特性發生突變,最終表現為楔形舵片失速.鑒于楔形舵片的流體動力特性,在失速區(9°~12°舵角)的升力系數僅與5°~6°相當,因此該類舵片的許用舵角不能超過8°.
本文分別采用數值模擬與水洞試驗的方法研究了楔形舵片的失速特性,并且所得現象和結論的一致性良好.兩種研究方法相互參驗,表明了研究結果的可靠性和置信度,所提出的數值方法和試驗方案均適用于同類問題的研究.
4 結 論
1)數值模擬和水洞試驗得出的舵片流體動力特性與低壓面的空化特性一致,兩種研究方法相互參驗,證明了本文建立的數值模型和提出的試驗方案具有正確性和合理性.
2)在低速通氣工況下,楔形舵片的阻力系數在0°~5°舵角范圍內基本維持不變,舵角超過5°以后阻力系數將隨舵角的增大而略微增加;舵片的升力系數在0°~8°舵角范圍內具有良好的線性,舵角超過8°以后楔形舵片的的升力系數下降舵角至5°水平,發生失速現象;在9°~12°舵角范圍內,舵片升力系數隨舵角的增大而緩慢增加,此時舵效遠小于失速前.
3)在舵角超過8°以后,楔形舵片低壓面發生空化,致使該區域壓力不能夠進一步降低;低壓面的空化是導致楔形舵片失速的根本原因;考慮楔形超空化舵片的失速特性,24°楔形舵片在低速通氣工況下的許用舵角不得超過8°.
[1] LUO Kai,LI Daijin,DANG Jianjun,et al. Motion control model of supercavitating vehicle considering time-delay effect of supercavitation[J]. Journal of Traffic and Transportation Engineering, 2010, 10(3): 41-45.
[2] LI Daijin, LUO Kai, HUANG Chuang, et al. Dynamics model and control of high-speed supercavitating vehicles incorporated with time-delay[J]. International Journal of Nonlinear Sciences and Numerical Simulation, 2014, 15(3/4): 221-230. DOI: 10.1515/ijnsns-2013-0063.
[3] NGUYEN V. Dynamics and control of non-smooth systems with applications to supercavitating vehicles[D]. Maryland: University of Maryland, College Park, 2011.
[4] HASSOUNEH M A, NGUYEN V, BALACHANDRAN B, et al. Stability analysis and control ofsupercavitating vehicles with advection delay[J]. Journal of Computational and Nonlinear Dynamics, 2013, 8(2): 21003. DOI: 10.1115/1.4006835.
[5] 劉海軍,鄒振祝. 楔型角對尾舵的流體動力特性研究[J]. 哈爾濱商業大學學報(自然科學版),2009, 25(1): 92-95.
LIU Haijun, ZOU Zhenzhu. Study of angles of wedge effect on hydrodynamic characteristics of rear fin[J]. Journal of Harbin University of Commerce(Natural Sciences Edition), 2009, 25(1): 92-95.
[6] 楊洪瀾,張嘉鐘,趙存寶,等. 楔體外部超空泡形狀預測[J]. 哈爾濱理工大學學報, 2006, 11(4): 106-110. DOI: 10.3969/j.issn.1007-2683.2006.04.030.
YANG Honglan, ZHANG Jiazhong, ZHAO Cunbao, et al. Prediction of wedge's supercavity shape[J]. Journal of Harbin University of Science and Technology, 2006, 11(4): 106-110. DOI: 10.3969/j.issn.1007-2683.2006.04.030.
[7] 胡影影,朱克勤,席葆樹. 翼型空化繞流數值研究[J]. 力學季刊, 2003, 24(4): 572-576. DOI:10.3969/j.issn.0254-0053.2003.04.022.
HU Yingying, ZHU Keqin, XI Baoshu. Numerical study of cavity flow around a hydrofoil[J]. Chinese Quarterly of Mechanics, 2003, 24(4): 572-576. DOI:10.3969/j.issn.0254-0053.2003.04.022.
[8] NGUYEN V, HASSOUNEH M A, BALACHANDRA B, et al. Non-steadyplaning and advection delay effects on the dynamics and control of supercavitating vehicles [C]// Amer Soc Mechanical Engineers. Denver:[s.n.], 2011: 775-781.
[9] WANG Zou, YU Kaiping, ROGER A. Modeling and simulations of supercavitating vehicle with planing force in the longitudinal plane [J]. Applied Mathematical Modelling, 2015, 39(19): 6008-6020.
[10]王京華,魏英杰,于開平,等. 基于空泡記憶效應的水下超空泡航行體建模與控制[J]. 振動與沖擊, 2010, 29(8): 160-163. DOI: 10.3969/j.issn.1000-3835.2010.08.036.
WANG Jinghua, WEI Yingjie, YU Kaiping, et al. Modeling and control of underwater supercavitating vehicle based on memory effect of cavity[J]. Journal of Vibration and Shock, 2010, 29(8): 160-163. DOI: 10.3969/j.issn.1000-3835.2010.08.036.
[11]ZHENG Zhiying, LI Fengchen, LI Qian, et al. Numerical study on the characteristics of natural supercavitation by planar symmetric wedge-shaped cavitators for rotational supercavitating evaporator [J]. Science China Technological Sciences, 2015, 58(6): 1072-1083.
[12]DZIELSKI J, KURDILA A. A benchmark control problem for supercavitating vehicles and an initial investigation of solutions[J]. Journal of Vibration and control, 2003, 9(7): 791-804. DOI: 10.1177/1077546303009007004.
[13]YU Kaiping, ZHANG Guang, ZHOU Jingjun, et al. Numerical study of the pitching motions of supercavitating vehicles[J]. Journal of Hydrodynamics, Ser. B, 2012, 24(6): 951-958. DOI: 10.1016/S1001-6058(11)60323-5.
[14]黃闖,羅凱,黨建軍,等. 流域徑向尺度對自然超空泡的影響規律[J]. 西北工業大學學報,2015, 33(6): 936-941. DOI:10.3969/j.issn.1000-2758.2015.06.011
HUANG Chuang, LUO Kai, DANG Jianjun, et al. Influence of flow field’s radial dimension on natural supercavity [J]. Journal of Northwestern Polytechnical University, 2015, 33(6):936-941. DOI:10.3969/j.issn.1000-2758.2015.06.011
[15]GOEL A. Robust control ofsupercavitating vehicles in the presence of dynamic and uncertain cavity[D]. Gainesville, FL: University of Florida, 2005.
(編輯 張 紅)
Numerical simulation and water tunnel experiment on the stalling characteristics of wedge rudders
HUANG Chuang, DANG Jianjun, LUO Kai, LI Daijin
(School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an, 710072, China)
To obtain the stalling characteristics of wedge rudders under cavitation conditions and to explore the mechanism leading to the stalling, the ventilating cavitation flow field around supercavitating vehicle which uses a 24° wedge rudder as the aft control plane was investigated by establishing the three-dimensional numerical simulation model and the water tunnel experimental system. The change law of the wedge rudder’s lift, drag, and cavitation characteristics along with rudder angle were studied by the numerical simulation and water tunnel experiment, respectively. According to the research results, the proposed numerical and experimental methods are reasonable; the drag coefficient of the wedge rudder varies slightly with the rudder angle in the range of 0°-5°; the lift coefficient has good linearity in the rudder angle range of 0°-8° and 9°-12°, but the slope of the former range is considerably bigger than that of the latter range. Moreover, when the rudder angle exceeds 8°, the lift coefficient of the wedge rudder will reduce sharply, stalling will happen, and the low-pressure surface of the wedge rudder will be covered by cavity. Therefore, the cavitation occurring on the low-pressure surface of the wedge rudder may be the main reason leading to the stalling. Furthermore, it is suggested that the allowable rudder angle of the 24° wedge rudder should not exceed 8°.
wedge rudder; numerical simulation; water tunnel experiment; cavitation; stalling; allowable rudder angle
10.11918/j.issn.0367-6234.2016.10.018
2015-04-20
國家自然科學基金(51579209;51409215;51679202)
黃 闖(1989—)男,博士研究生;
黨建軍(1965—)男,教授,博士生導師;
黃 闖,hc_389@163.com
TJ630.1
A
0367-6234(2016)10-0125-06
羅 凱(1972—)男,教授,博士生導師