近海島礁CORS系統測試研究
2016-11-17 08:15:14管明雷王英剛李飛龍伏天淑周立
海洋開發與管理 2016年8期
管明雷,王英剛,李飛龍,伏天淑,周立
(1.淮海工學院 連云港 222005;2.上海華測導航技術股份有限公司 上海 201702)
?
近海島礁CORS系統測試研究
管明雷1,王英剛1,李飛龍2,伏天淑1,周立1
(1.淮海工學院 連云港 222005;2.上海華測導航技術股份有限公司 上海 201702)
近海島礁CORS系統將CORS基站從內陸向近海海岸和近海島礁延伸,使近海區域實現厘米級高精度導航定位。文章對近海島礁CORS系統的各部分組成進行介紹,同時對基準站穩定性、基準站時間延遲、移動站多路徑效應和移動站內外符合精度進行測試研究,為CORS技術向海上發展提供參考。
島礁CORS;定位導航;工程技術
2 近海島礁CORS系統構成
2.1 系統概述
近幾年城市CORS技術快速發展,已經基本實現城市區域覆蓋,為城市基礎地理空間信息的采集提供極大便利[1],CORS系統向海洋延伸也將是未來發展趨勢。CORS系統由基準站子系統、數據處理中心、數據通信系統和用戶應用系統等4個部分組成,各基準站與數據處理中心通過數據通信系統連接成一體,形成CORS基準站網。本研究的測試基于某單位在建的近海島礁CORS系統,其中2個基準站位于沿岸、1個基準站位于離岸7 km左右的海島,站間網絡通信采用無線通信技術;該島礁CORS系統基準站使用華辰HC-5型號基準站型接收機,基準站接收原始觀測數據,并通過數據通信系統傳到數據處理中心,數據處理中心主要負責處理接收的數據,并將得到的差分數據通過數據通信系統播發給用戶;基準站組網軟件選用NrsEagleNet,網絡RTK差分服務軟件選用NrsEagleServer,這2個軟件都是南方公司NRS 系統軟件系列;海島基準站的電力由太陽能電池板、太陽能控制器和大容量儲備電源提供,蓄電池可保證持續供電一周,太陽能控制器具有熄電重啟功能。
2.2 系統網絡通信
數據通信系統是CORS的重要組成部分,被稱為CORS的“神經系統”,是實現CORS各種服務功能的途徑,一套穩定可靠的數據通信系統更是保證CORS系統正常穩定運行的必要因素[2-4]。CORS的數據通信系統主要包括“基準站—數據處理中心”的原始觀測數據傳輸和“數據處理中心—用戶接收機”的差分改正數據傳輸。
2.2.1 基準站—數據處理中心通信
目前傳統的陸基CORS系統中,基準站與數據處理中心之間的數據傳輸主要通過Internet網絡實現,其傳輸速度快、穩定性高,是數據傳輸的首要選擇。但在各種基礎設施匱乏的島礁上,基準站觀測數據很難像在陸地上一樣通過Internet網絡實現有線傳輸,因此在島礁上通常采用無線網絡通信方式。基準站接收機利用宏電H792X 4G Router數據通信終端接入互聯網,采用TCP/IP協議,訪問到數據處理中心NrsEagleNet基準站管理服務器的固定IP地址,將基準站接收數據傳輸到管理服務器中。
2.2.2 數據處理中心—用戶移動站接收機通信
數據處理中心與用戶移動站間的數據傳輸采用無線通信,目前最流行的是GPRS/CDMA通信方式,即移動站通過GPRS/CDMA接入互聯網,采用TCP/IP協議,訪問到數據處理中心NrsEagleServer用戶管理服務器的固定IP地址,驗證通過Sever管理用戶給出的賬號密碼,實現移動站與數據處理中心之間的雙向通信。
3 CORS系統穩定性測試
CORS系統在運行之前必須對CORS基準站組網進行測試,檢測CORS系統運行的穩定性和數據可靠性,為移動站用戶提供實時、高精度的導航定位服務。對CORS系統基準站組網的測試主要包括基準站穩定性分析和通信穩定性分析。
3.1 CORS基準站穩定性測試
為確保CORS系統為用戶移動站提供高精度、穩定可靠的服務,首先要確保基準站本身的精度。由于基準站位于海島上,受天文潮和固體潮雙重作用,基準站會產生位置變動,從而影響CORS系統的定位精度。因此,需要對基準站的真實坐標進行定期檢核修復,具體方法就是將系統中的基準站與我國的IGS跟蹤站進行聯測,利用高精度數據處理軟件GAMIT/GLOBK對長基線進行解算,得到基準站的最新坐標,一般選擇3~4個靠近CORS網的IGS站就可以得到精度較高且較為穩定的解算精度[4]。
在實驗中選取bjfs站、shao站和wuhn站進行聯測,它們分別位于北京房山、上海佘山和武漢。通過解算得到3個基準站在WGS-84坐標系統下的三維坐標(表1)。
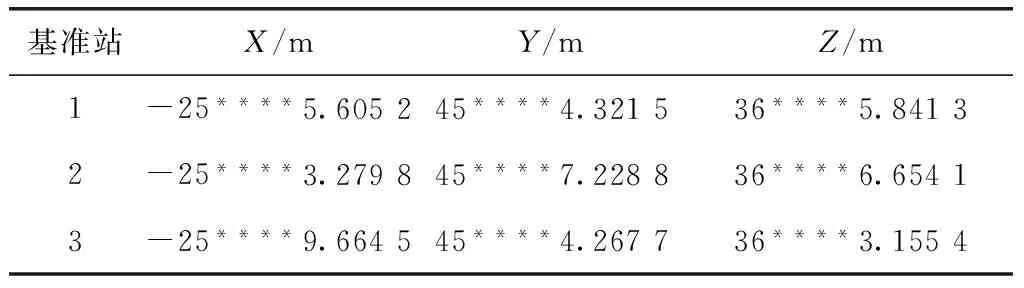
表1 最新基準站坐標
3.2 CORS 基準站時間延遲測試
在CORS系統中,時間延遲包括數據發送時延、數據傳播時延和數據處理時延,而網絡從基準站到數據處理中心的數據時延主要是發送時延和處理時延[3]。一般來說,數據時延小于500 ms就不會影響數據處理中心實現網絡RTK基線的實時解算[5]。
發送時延計算公式如下:
發送時延式中:數據塊長度即基準站1 Hz帶寬的數據量,按照50~130 KB計算;信道寬度為數據傳輸的上行速率。島礁上的基準站接收機與數據處理中心之間的數據傳輸是通過無線模塊實現的,為選擇合適的網絡模式,進行時間延遲測試,結果如表2所示。
從表2可以看出,在使用3G模塊時只有聯通時延在500 ms以內,而在使用4G模塊時三大運營商時延均遠遠小于500 ms,又由于數據處理延時根據儀器的不同在60~120 ms之間,因此理論上在網絡正常的情況下,只有4G數據延時可滿足基線實時解算。該島礁CORS通信系統測試階段選用聯通3G作為基準站與數據處理中心之間的通信模塊,結果表明CORS基線可以實時解算但會出現短暫的基線浮動。因此,在CORS系統運行中應盡量選擇4G模塊作為數據傳輸手段。
4 CORS系統精度測試
4.1 海面多路徑測試
在CORS系統精度測試中,最主要的就是對移動站定位精度進行測試[6]。影響移動站定位精度的主要因素包括基準站穩定性、接收機性能和移動站觀測條件,其中影響海上移動站定位精度的最主要因素是多路徑效應。CORS系統無法對移動站的多路徑效應所帶來的誤差進行改正,目前多路徑的改正主要通過改變截止高度角或增加抑徑板等方法來降低誤差。本研究基于接收機兼容不同星座的情況,研究多路徑效應與接收機星座數增加、衛星顆數變化的關系,為海上移動站選擇合適的接收機來降低多路徑效應、提高島礁CORS服務精度。
島礁CORS系統建設主要針對港口及其近海工程的需求,提供厘米級的實時定位精度。由于海面情況在潮波作用下的復雜性,海面上目標點的多路徑效應也各異,對海面目標進行導航定位時,CORS系統無法對其多路徑效應進行合理改正。因此,在對移動站測試的過程中,海面對移動站產生的多路徑效應測試是不可或缺的。本實驗利用GPS單模(單星座)接收機和GPS/GLONASS雙模(雙星座)接收機進行單點定位比較海面多路徑效應與衛星顆數的關系,解算軟件采用TEQC(Translation、Editing and Quality Checking);TEQC是功能強大且簡單易用的 GPS/ GLONASS 數據預處理軟件,主要功能有格式轉換、編輯和質量檢核。試驗結果如圖1至圖3所示。
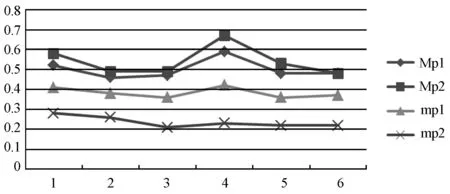
圖1 單模mp1/mp2和雙模Mp1/Mp2比較
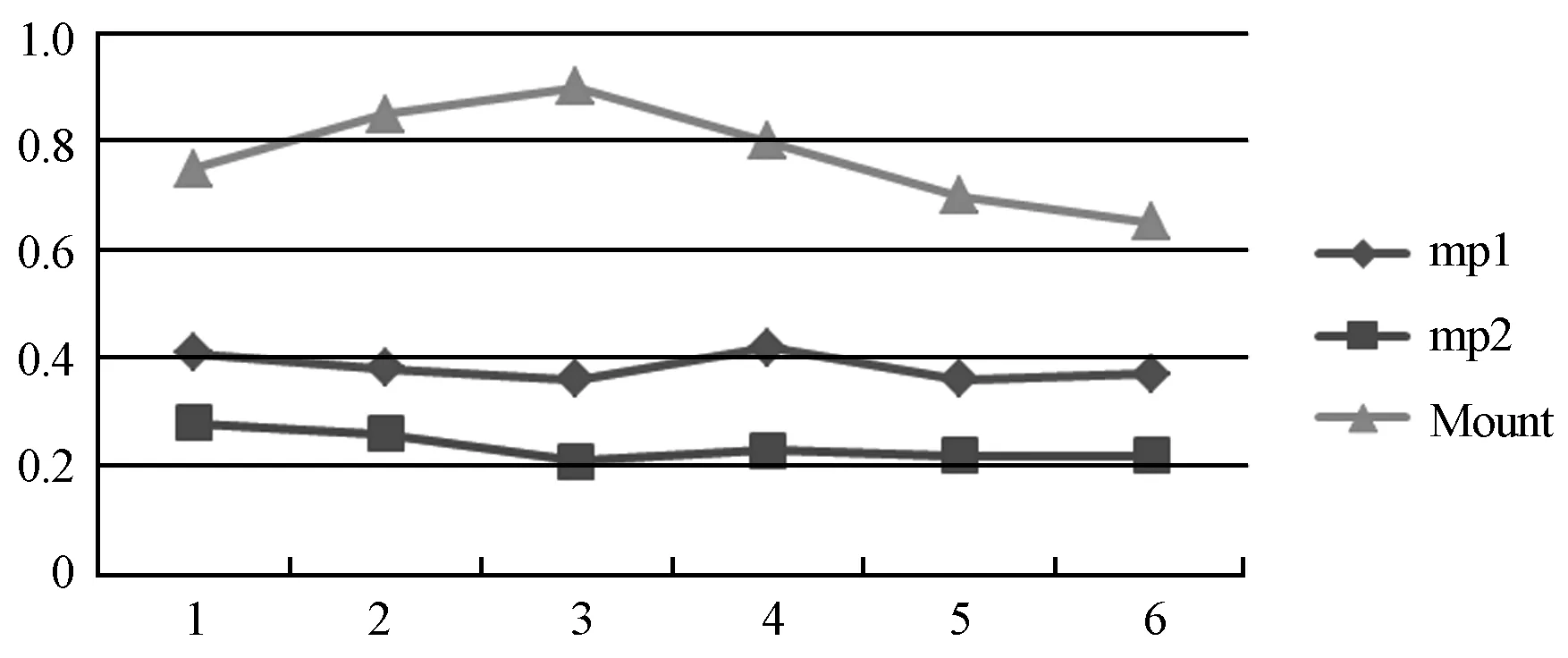
圖2 單模mp1/mp2與衛星顆數比較
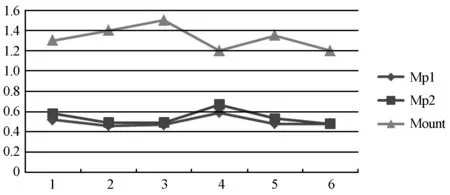
圖3 雙模Mp1/Mp2與衛星顆數比較
從圖1可以發現,GPS/GLONASS雙模下的Mp1/Mp2值始終高于GPS單模下的mp1/mp2值,表明增加不同導航衛星的種類對改善多路徑效應沒有益處,這與GLONASS導航系統本身有關,因為GLONASS采用頻分多址(FDMA),使信號頻率的變化受外界條件的影響,導致GLONASS的單點定位精度稍遜于GPS[7];由于目前TEQC軟件還不支持BDS的質量檢核,所以未進行BDS與GPS/GLONASS的比較。從圖2、圖3可以發現,mp1/mp2值與衛星顆數成負相關性,即衛星顆數越多、mp1/mp2值越小。因此,移動站在進行海上導航定位時應盡量選用GPS單模接收機,降低多路徑對其影響,以提高CORS系統對移動站改正的精度。
4.2 內外符合精度測試
內符合精度用來評定差分定位的穩定性程度,其數學方法是計算每一測點所有測量值的算術平均值,再將求得的算術平均值與每個測量值求差,然后分別統計出X、Y和Z三個方向上差值的分布情況,內符合精度值越小表示CORS-RTK定位的穩定性越高。外符合精度反映系統定位的準確性,其定義為在已知測試點上,通過轉換參數實測得出當地坐標系下的坐標成果,與該測試點的已知坐標成果相比較,即可得出在X、Y和Z方向上的外符合精度分布情況。
實驗選取島礁CORS網覆蓋海區內多個島嶼上分布的8個坐標已知點作為測試點,分別做采樣間隔為1 s的長時間觀測,經過數據處理,得到的觀測值內符合精度結果如圖4、圖5所示。
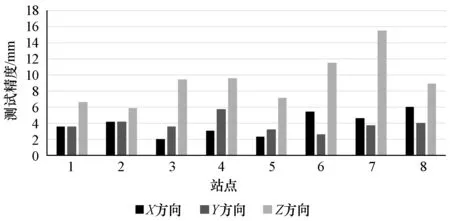
圖4 內符合精度測試
從圖4可以看出,在基站覆蓋范圍內,8個測試點上各方向的內符合精度值都符合系統設計要求:平面X、Y方向上內符合精度最小為2 mm、最大為6 mm,均在1 cm內;Z方向上精度略差,最小為5.9 mm、最大為15.5 mm,均在2 cm內。
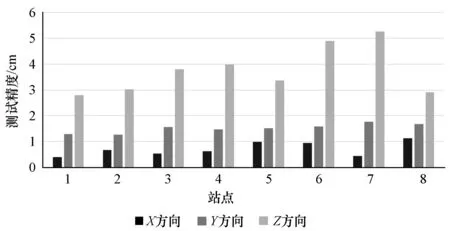
圖5 外符合精度測試
從圖5可以看出,各測站點平面X、Y方向定位精度在2 cm以內,Z方向個別高于5 cm。結果表明,近海島礁CORS系統在平面方向定位精度明顯優于垂直方向,且兩者均符合系統設計要求。
5 結語
通過測試結果,該島礁CORS系統的穩定性和定位精度均達到規范要求,海上移動站多路徑效應也找到新的改善方法。但島礁CORS系統建設還面臨一些問題,如站點選址、網絡通信等。在未來CORS系統向近海建設的過程中,常規無線網絡通信技術將不再適用于海上數據傳輸,需要將衛星通信和北斗短報文通信等新的通信技術運用于CORS系統數據傳輸中。隨著海上風力發電站、近海石油平臺等一大批海洋工程的建設,CORS基準站點選址也不再局限于近海島礁的位置。隨著近海CORS系統的不斷建立和發展,近海CORS網絡范圍內的實時導航定位精度將得到大大提高,使近海厘米級定位精度成為可能。
[1] 汪偉,馬華山,史廷玉,等.基于CORS的單基站RTK點位檢校與精度評定[J].測繪通報,2013(11):52-54.
[2] 黃俊華,陳文森.連續運行衛星定位綜合服務系統建設與應用[M].北京:科學出版社,2009.
[3] 黃丁發,周樂韜,李成鋼,等.GPS增強基準站網絡理論[M].北京:科學出版社,2011.
[4] 趙倩,沈飛.江蘇省CORS系統解算中IGS基準站選取的研究[J].測繪科學,2011,36(6):124-126.
[5] 全GB/T 28588—2012球導航衛星系統連續運行基準站網技術規范[S].北京:中國標準出版社,2012.
[6] 張西軍,唐衛明,曾廣鴻,等.廣州市CORS系統實時動態定位精度測試[J].測繪信息與工程,2008,33(5):6-7.
[7] 付先國.GPS與GLONASS的幾點比較分析[J].城市勘測,2010(2):81-83.
Testing Research of Offshore Reefs CORS System
GUAN Minglei1,WANG Yinggang1,LI Feilong2,FU Tianshu1,ZHOU Li1
(1.Huaihai Institute of Technology,Lianyungang 222005,China;2.Shanghai Huace Navigation Technology LTD,Shanghai 201702,China)
Offshore reefs CORS system extends the coverage of CORS from inland to the near shore and offshore islands and reefs to achieve centimeter level accurate navigation and positioning in offshore areas. Components of the offshore reefs CORS system were introduced in the paper. At the same time, stability and time delay of the
tation, multi-path effects and accuracy of the mobile station were tested and studied, which provided references for the development of CORS technology utilized on the sea.
Reefs CORS,Positioning and navigation,Engineering technology
CORS(Continuous Operational Reference System)的建設和發展,陸地上全球導航衛星系統實時動態定位精度已達到厘米級。由于海上地理環境的特殊性,近海高精度導航定位成為海洋開發利用的“瓶頸”之一。為解決這一問題,我國在沿海地區都布設相應的差分臺站,如沿海信標臺站、海洋局差分站和沿海省(自治區、直轄市)CORS網等,在一定程度上提高定位精度和穩定性,但是港口航道建設和近海海洋工程這類對導航定位精度要求較高的行業,目前海上定位精度還達不到相應的規范要求,因此近海島礁CORS系統建設成為未來海上定位發展的趨勢之一。本文基于在建的近海島礁CORS系統,對系統網絡的穩定性和時間延遲、海上移動站的多路徑效應以及系統的定位精度進行測試研究。
2016-04-14;
2016-08-01
管明雷,碩士研究生,研究方向為海洋空間信息技術,電子信箱:lyggml@126.com
P71
A
1005-9857(2016)08-0073-04
1 引言
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
當代化工研究(2016年9期)2016-03-20 16:22:13
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
