綜采工作面中部跟機自動化控制的數學模型
2016-11-21 07:17:18石勇林江崔志芳袁小勤
工礦自動化 2016年11期
石勇, 林江, 崔志芳, 袁小勤
(1.東華大學 機械工程學院, 上海 201620;2.上海創(chuàng)力集團股份有限公司, 上海 201706;3.山西新元煤炭有限責任公司, 山西 晉中 045400)
?
綜采工作面中部跟機自動化控制的數學模型
石勇1,2, 林江2, 崔志芳3, 袁小勤3
(1.東華大學 機械工程學院, 上海 201620;2.上海創(chuàng)力集團股份有限公司, 上海 201706;3.山西新元煤炭有限責任公司, 山西 晉中 045400)
針對綜采工作面的雙向割煤生產作業(yè)特點,分析了采煤機、液壓支架、刮板輸送機聯合運轉時的協調控制過程,根據采煤生產作業(yè)中刮板輸送機彎曲段形成原理,提出了刮板輸送機彎曲段形成的數學模型;在該模型基礎上,分析了工作面中部液壓支架跟機自動化作業(yè)的工藝過程,提出了綜采工作面中部跟機自動化控制數學模型;根據該綜采工作面中部跟機自動化控制數學模型,對某煤礦3107綜采工作面相關參數進行了計算,并總結了3107綜采工作面中部跟機自動化生產的經驗。應用結果表明,綜采工作面中部跟機自動化控制的數學模型與跟機自動化工藝過程相吻合,為進一步實現智能化綜采工作面提供了理論基礎。
煤炭開采; 綜采工作面; 跟機自動化; 采煤機; 液壓支架; 刮板輸送機
0 引言
煤炭開采屬于高危行業(yè),在煤炭開采中,總是伴隨著各種事故發(fā)生的風險[1-2],如瓦斯爆炸、粉塵爆炸、透水、冒頂等。另外,在煤炭開采中,工作人員長時間處于粉塵環(huán)境,無法避免塵肺病[3]。
為降低煤炭開采對人身的傷害,必須要發(fā)展自動化、智能化、無人化開采[4]。而自動化、智能化、無人化開采的基礎是實現“三機”(采煤機、刮板輸送機、液壓支架)的自動化、智能化聯合運轉[5]。“三機”自動化、智能化控制的關鍵點在于采煤機、液壓支架的生產工藝之間的協調控制,即跟機自動化[6]作業(yè)。跟機自動化控制功能的應用降低了煤礦工人的勞動強度,提高了煤礦生產效率[7]。其實現方式由綜采工作面的進刀方式[8-9]、生產工藝[10]、移架方式[11]等決定。
朱小林等[12]根據液壓支架的工作過程,研究了采煤機的行走速度對跟機自動化的影響,但沒有分析采煤機與液壓支架的其他聯動相關過程。田成金等[13]闡述了雙向割煤跟機自動化工藝過程,但沒有對中部跟機過程進行詳細分析。陶顯等[14]、張守祥等[15]對跟機自動化進行了簡化建模,但沒有對中部跟機過程進行建模。于亞運等[16]建立了跟機自動化系統數學模型,但沒有詳細考慮彎曲段推溜行程問題。張智喆等[17]使用間接的采煤機運動軌跡檢測方式,實現了對刮板輸送機彎曲段的檢測,但沒有給出具體的推導彎曲段形成的數學原理。
目前,綜采工作面主要采用工作面端部斜切進刀、雙向割煤方式。本文根據該作業(yè)方式特點,分析了采煤機、刮板輸送機、液壓支架聯合運轉時的協調控制過程,提出了刮板輸送機彎曲段推移的數學模型,以及在工作面中部液壓支架跟機自動化控制的數學模型。
1 跟機自動化概述
綜采工作面設備布局如圖1所示。在綜采工作面生產作業(yè)過程中,液壓支架掩護內部的設備、人員。采煤機通過行走齒輪咬合刮板輸送機上的銷排實現左右行走[18-19],同時左右搖臂帶動滾筒根據工作面情況適當上升與下降,行走前方滾筒在上方割頂刀,后方滾筒在下方割底刀。刮板輸送機將截割下來的煤運出工作面。
跟機自動化是以采煤機的位置和行走方向為基準,各個支架根據綜采工作面的工藝要求,在采煤機前方(采煤機行走方向為前)的支架自動收回煤壁支護的護幫板,以便讓采煤機正常通過,互不干涉;在采煤機后方的支架及時自動移架,完成對割煤后懸空頂板的支護,并適時伸出護幫板,防止煤壁垮落;在移架完成后的適當距離自動推移刮板輸送機(形成彎曲段),將采煤機滾筒裝煤剩下的煤塊裝載至刮板輸送機上,并為下一刀割煤循環(huán)做準備。
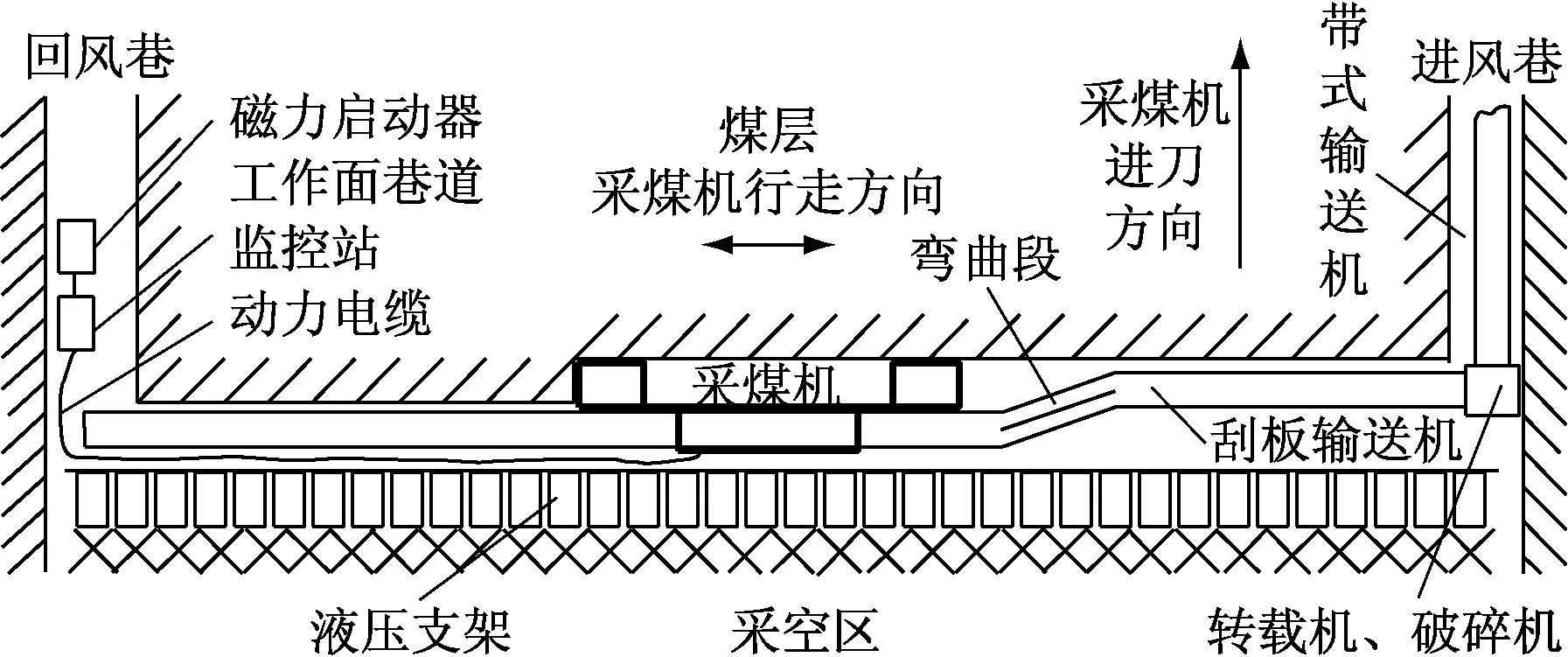
圖1 綜采工作面設備布局(俯視)
跟機自動化的目標是實現工作面采煤設備的自動推進,并保證采煤機與液壓支架互不干涉;刮板輸送機保持良好的運行姿態(tài),并保證其直線度;對工作面頂板、煤壁進行有效管理,保證支護強度達到設定的初撐力[6]。
2 跟機自動化數學模型
在綜采工作面中部跟機自動化生產作業(yè)時,液壓支架根據采煤機的位置和行走方向,完成護幫板的伸縮、推溜、移架的自動控制。在移架自動控制過程中,液壓支架的推移千斤頂根據設定的彎曲段長度,自動推移刮板輸送機的溜槽,由推移千斤頂的執(zhí)行時間、推移行程確定彎曲段每節(jié)溜槽的推移量。
2.1 刮板輸送機彎曲段數學模型
工作面彎曲段長度與斜切進刀的時間相對應;彎曲段過長,增加了采煤機割1刀煤的時間;彎曲段過短,推刮板輸送機溜槽時可能會發(fā)生將刮板鏈頂斷或頂脫槽、溜槽間錯槽等事故。合理使用刮板輸送機可彎曲性能的關鍵是確定可彎曲段的合理長度。
在液壓支架立柱支護強度達到設定的初撐力時,下方的推移千斤頂方可推移刮板輸送機的溜槽,形成彎曲段。當推移千斤頂推移刮板輸送機的溜槽時,溜槽會自然出現2段長度相等、方向相反的對稱彎曲段[20]。
根據彎曲段溜槽個數Nc的奇偶性,可得圖2中的2種狀態(tài)。圖3為2個溜槽之間的轉角局部示意。
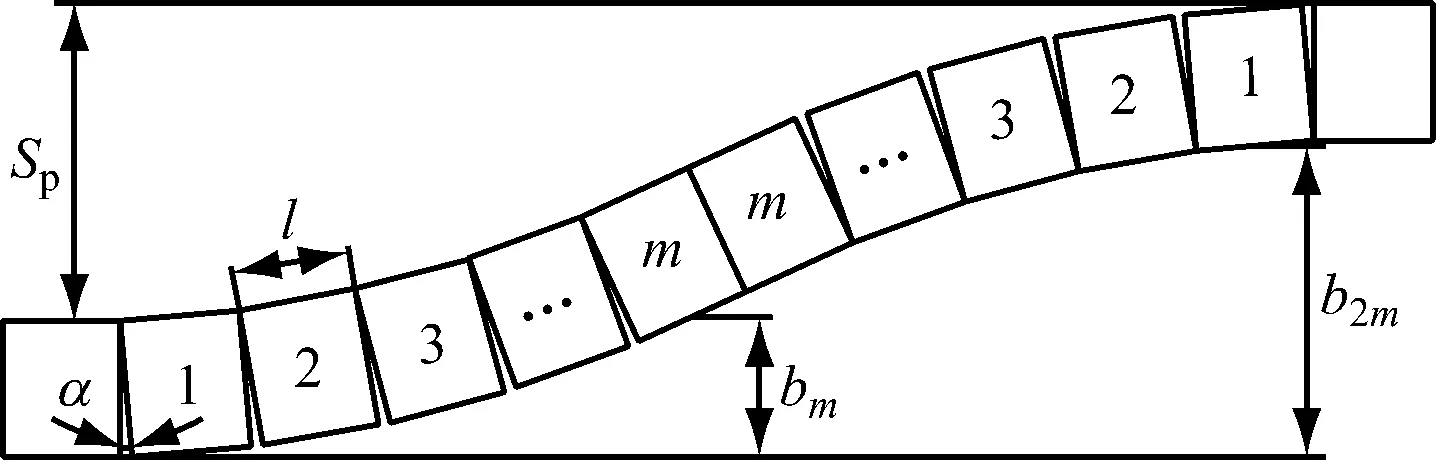
(a) Nc為偶數時(Nc=2m)
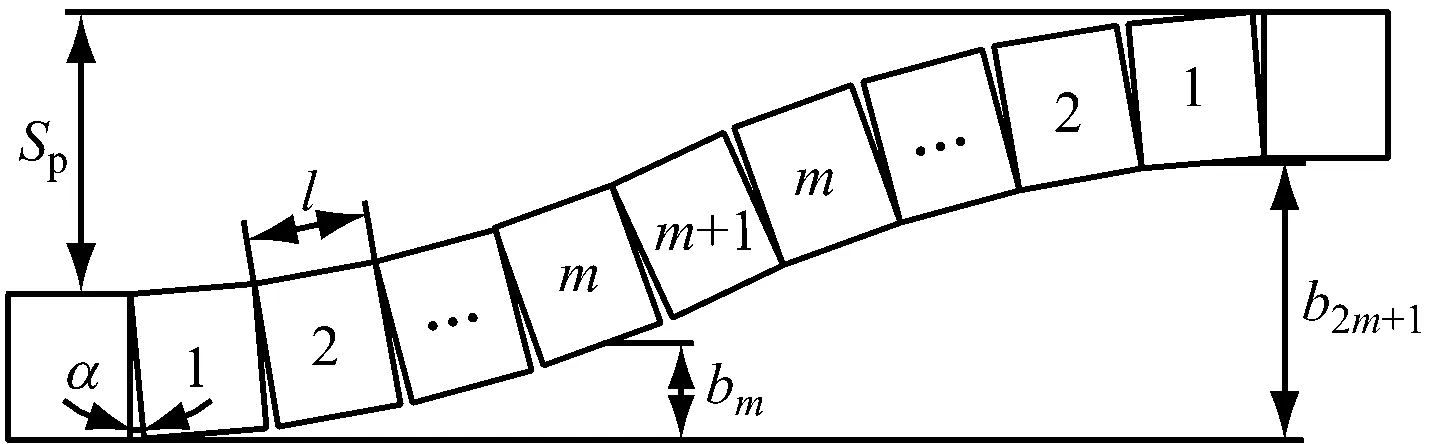
(b) Nc為奇數時(Nc=2m+1)
圖3 2個溜槽轉角局部示意
當溜槽數Nc=2m(m=1,2,…)時,推移步距為
(1)
式中:l為每節(jié)溜槽的長度,m;α為溜槽間的水平轉角,°;lw為每節(jié)溜槽的寬度,m。
每節(jié)溜槽的推移距離bi(i=1,2,…,Nc)計算公式如下。
1≤i≤m時,
(2)
式中:lx為溜槽間水平轉角α對應的弦長,m;β為弦所對應的轉角,°。
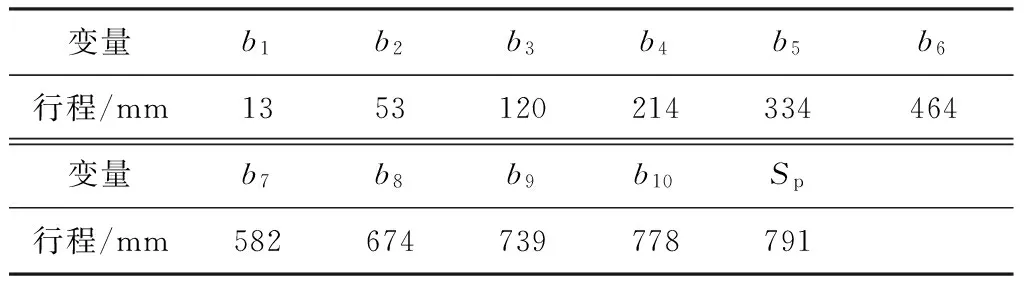
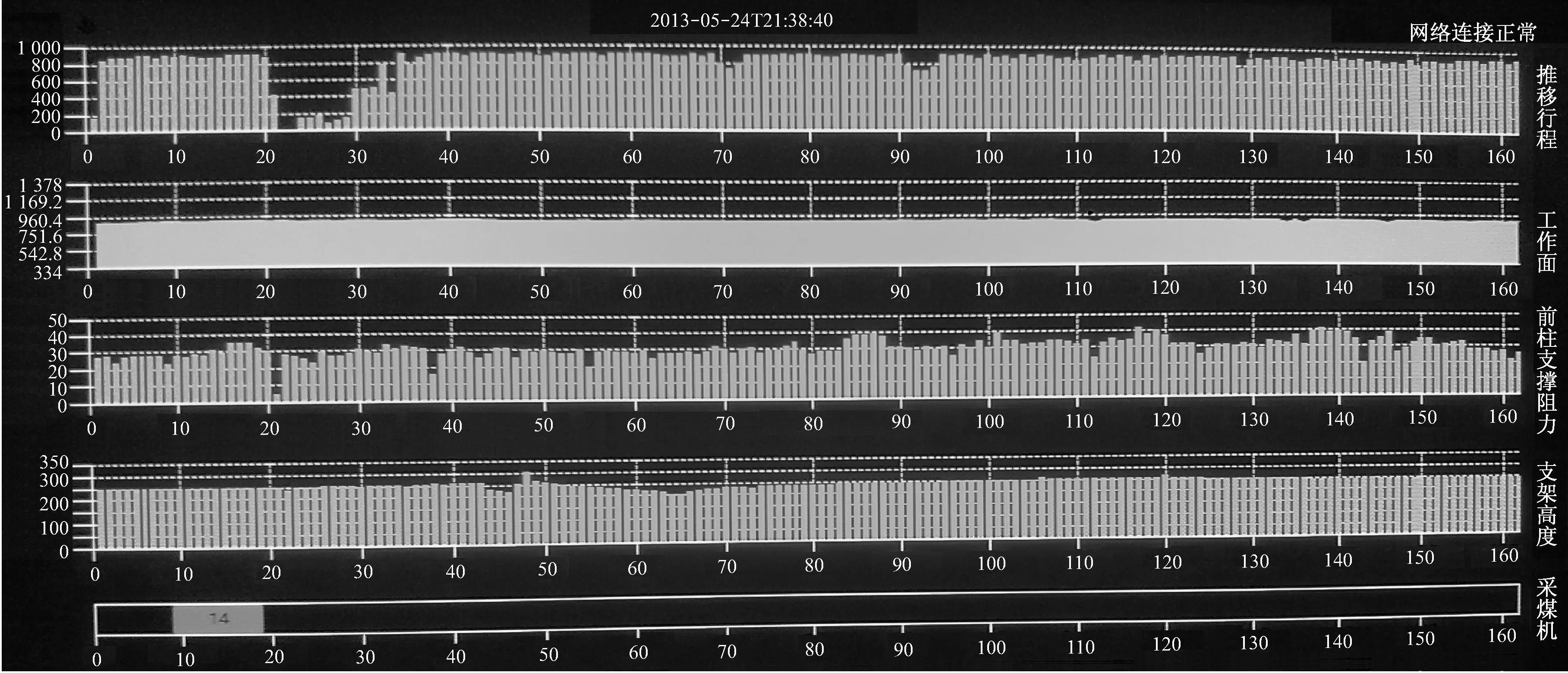
m (3) 當溜槽數Nc=2m+1時,推移步距為 (4) 圖3中經過幾何計算可得彎曲段溜槽間水平轉角α對應的弦長為 (5) 每節(jié)溜槽的推移距離計算公式如下。 1≤i≤m時, (6) i=m+1時, (7) m+1 (8) 2.2 中部跟機數學模型 采煤機位于工作面中部,其尺寸如圖4所示。 圖4 采煤機尺寸 當采煤機與工作面左端相距Sx時,右滾筒(前滾筒)右邊緣與工作面左端的距離為 (9) 式中:q為采煤機牽引方向(q=1表示采煤機向右牽引,q=-1表示采煤機向左牽引);L1為采煤機回轉中心距,m;L2為搖臂長度,m;γ為右滾筒相對于機身轉過的角度(當滾筒中心處于回轉中心線以上時,γ>0),°;R為滾筒半徑,m。 左滾筒(后滾筒)左邊緣與工作面左端的距離為 (10) 式中η為左滾筒相對于機身轉過的角度(當滾筒中心處于回轉中心線以上時,η>0),°。 右滾筒采高為 (11) 式中H0為回轉中心距底板高度,m。 左滾筒采高為 (12) 液壓支架動作包括護幫板的伸縮動作、移架動作、推溜動作。支架動作與采煤機位置的關系如圖5所示。 圖5 支架動作與采煤機位置的關系 采煤機位置與支架動作的函數如下。 (1) 護幫板的伸縮動作。為避免在割煤過程中,采煤機的前滾筒割到支架,位于前滾筒前方Df個支架距離的支架護幫板需要收回,收護幫板個數為Nd。在采煤機后滾筒后方Db個支架距離處,支架完成移架動作后,護幫板需要及時伸出,伸護幫板個數為Np,防止出現煤壁片幫。 (2) 移架動作。在采煤機后滾筒后方Db個支架距離處,進行移架操作。移架個數為Nm。 (3) 推溜動作。為了保證采煤機的正常使用,一般要求距離后滾筒后方Dc(Dc=Nc+Nm+Db)個支架處,才允許刮板輸送機進行推溜動作。 推溜動作函數如下。 q=1時,當前支架Px在左滾筒處支架后方Dc個支架距離時,刮板輸送機開始推溜,推溜函數為 (13) q=-1時,當前支架Px在右滾筒處支架后方Dc個支架距離時,刮板輸送機開始推溜,推溜函數為 (14) 山西新元煤炭有限責任公司3107綜采工作面可采走向長度為1 591.4 m,工作面寬度為240 m,煤厚2.2~3.2 m,傾角為2~4°,煤炭可采儲量為160萬t。工作面主要配套設備:ZY6800/18/37D 型液壓支架,共162架,配有電液控系統;MG400/930-WD型采煤機,配有動力載波數據通信系統;SGZ1000/1400 型刮板輸送機,配有ZQS127-Z監(jiān)控系統。 該工作面中部跟機自動化具體參數:l=1.5 m,Df=3,Db=3,Nc=10,Dc=18,Sp=0.8 m,α=1°。使用跟機自動化數學模型對該工作面的參數進行計算,所得每節(jié)溜槽的推移距離bi、推移步距Sp見表1。可看出推移步距為0.791 m,與工作面要求的步距(0.8 m)誤差為1.1%。 表1 彎曲段推溜位移 基于跟機自動化數學模型的跟機自動化控制系統已在3107工作面正常使用,監(jiān)控畫面如圖6所示。從最上面一排柱狀圖的長短可看出推移千斤頂位移的變化情況,從而可以直觀地觀察刮板輸送機的彎曲段變化情況。跟機自動化工藝過程與本文所建數學模型相吻合。 跟機自動化控制系統的應用降低了工人的勞動強度,提高了采煤效率。但是該系統在運行過程中暴露了一些問題,需要進一步改進與提升,如系統自動拉架過程中,經常出現拉架不到位的情況,需要人工補拉;系統自動推溜時,經常出現推溜不到位的情況,需要人工補推。 圖6 跟機自動化控制系統監(jiān)控畫面 (1) 刮板輸送機彎曲段的數學模型,為跟機自動化彎曲段的控制提供了數學依據。 (2) 刮板輸送機彎曲段的數學模型,為解決跟機自動化生產中出現的推溜不到位現象,提供了數學計算基礎,可為控制系統的完善提供一定的幫助。 (3) 跟機自動化控制的數學模型,為綜采工作面跟機自動化控制提供了控制基礎。 (4) 跟機自動化控制的數學模型,為滿足不同綜采工作面的不同工藝條件,以及進一步完善、提高跟機自動化控制系統的適應性提供了數學基礎。 [1] CHEN Hong,QI Hui,LONG Ruyin,et al.Research on 10-year tendency of China coal mine accidents and the characteristics of human factors[J].Safety Science,2012,50(4):745-750. [2] SPADA M,BURGHERR P.An aftermath analysis of the 2014 coal mine accident in Soma,Turkey:use of risk performance indicators based on historical experience[J].Accident Analysis & Prevention,2016,87:134-140. [3] MAHDEVARI S,SHAHRIAR K,ESFAHANIPOUR A.Human health and safety risks management in underground coal mines using fuzzy TOPSIS[J].Science of the Total Environment,2014,488/489:85-99. [4] 王國法.綜采自動化智能化無人化成套技術與裝備發(fā)展方向[J].煤炭科學技術,2014,42(9):30-34. [5] REID D C,RALSTON J C,DUNN M T,et al.Longwall shearer automation:from research to reality[M]//Billingsley J,Bradbeer R.Mechatronics and Machine Vision in Practice.Berlin:Springer,2007. [6] 牛劍峰.綜采液壓支架跟機自動化智能化控制系統研究[J].煤炭科學技術,2015,43(12):85-91. [7] 管俊才,柳軍濤,李曉林.新元公司3205綜采工作面自動化系統的研究與應用[J].煤礦現代化,2014(3):117-119. [8] 郭宏偉.綜采工作面長度與進刀方式的選擇[J].山西科技,2007(1):142. [9] 王永建,侯金平.采煤進刀方式對縮短循環(huán)時間的影響分析[J].煤炭工程,2007(7):63-65. [10] 郭明飛.綜采工作面自動化跟機采煤工藝研究[J].機械管理開發(fā),2016(4):98-101. [11] 王力軍,王會枝,吳宗澤.煤礦綜采工作面“三機”聯動控制策略研究[J].煤礦機械,2015,36(3):90-91. [12] 朱小林,李首濱.采煤機速度對綜采工作面跟機自動化影響研究[J].煤炭工程,2008(2):79-81. [13] 田成金,魏文艷,朱小林.基于SAC型液壓支架電液控制系統的跟機自動化技術研究[J].煤礦開采,2012,17(2):46-50. [14] 陶顯,林福嚴,張曉青,等.液壓支架電液控制系統跟機自動化技術研究[J].煤炭科學技術,2012,40(12):84-87. [15] 張守祥,王汝琳,劉芳.綜采跟機自動化系統分析與建模[J].工礦自動化,2006,32(4):4-7. [16] 于亞運,宋建成,田慕琴,等.液壓支架跟機自動控制系統的開發(fā)及應用[J].煤礦機械,2015,36(8):235-239. [17] 張智喆,王世博,張博淵,等.基于采煤機運動軌跡的刮板輸送機布置形態(tài)檢測研究[J].煤炭學報,2015,40(11):2514-2521. [18] XU Bing,ZHANG Yinfeng,CHENG Min.An effective method for longwall automation in thin coal seam[C]//The 10th IEEE International Conference on Industrial Informatics,Beijing,2012:565-569. [19] RALSTON J C,REID D C,DUNN M T,et al.Longwall automation:delivering enabling technology to achieve safer and more productive underground mining[J].International Journal of Mining Science and Technology,2015,25(6):865-876. [20] 姜學云.回采面刮板輸送機彎曲段長度的計算[J].煤炭科學技術,1985,13(10):17-19. Mathematical model of automatic following control in the middle of fully mechanized mining face SHI Yong1,2, LIN Jiang2, CUI Zhifang3, YUAN Xiaoqin3 (1.College of Mechanical Engineering, Donghua University, Shanghai 201620,China;2.Shanghai Chuangli Group Co., Ltd., Shanghai 201706,China;3.Shanxi Xinyuan Coal Co., Ltd., Jinzhong 045400,China) With consideration of bi-directional cutting characteristics of fully mechanized mining face and analysis of coordinated control of shear, hydraulic support and scraper conveyor, a mathematical model was firstly proposed to describe curved path of scraper conveyor according to formation principle of curved route when scraper conveyor was working during the mining production. Based on the model, working process of automatic following technology of hydraulic support in the middle of fully mechanized mining face was analyzed and a mathematical model of automatic following control in the middle of fully mechanized mining face was further built. Parameters of 3107 work face of a coal mine were calculated according to the mathematical model of automatic following control, and experiences during real production were concluded. The application result shows the model of automatic following control has a good coincidence with the actual following technique in working process, which can provide a theoretical basis for further realization of intelligent mechanized mining face. coal mining; fully mechanized coal face; automatic following control; shearer; hydraulic support; scraper conveyor 1671-251X(2016)11-0014-06 10.13272/j.issn.1671-251x.2016.11.004 石勇,林江,崔志芳,等.綜采工作面中部跟機自動化控制的數學模型[J].工礦自動化,2016,42(11):14-19. 2016-07-13; 2016-09-27;責任編輯:李明。 中央高校基本科研業(yè)務費資助項目(15D310302)。 石勇(1981-),男,江蘇淮安人,工程師,博士研究生,現主要從事采煤機、掘進機電氣控制系統設計、研發(fā)工作,E-mail:jackyshiy@163.com。 TD355/63 A 時間:2016-10-28 16:22 http://www.cnki.net/kcms/detail/32.1627.TP.20161028.1622.003.html


3 跟機自動化應用
4 結論
猜你喜歡
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12防爆電機(2022年1期)2022-02-16 01:14:06小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04河北畫報(2021年2期)2021-05-25 02:07:50中國生物醫(yī)學工程學報(2019年4期)2019-07-16 08:04:16模具制造(2019年3期)2019-06-06 02:10:54山西大同大學學報(自然科學版)(2016年2期)2016-12-12 03:19:28沈陽醫(yī)學院學報(2014年4期)2014-12-27 13:44:20航天器工程(2014年5期)2014-03-11 16:35:55河南科技(2014年18期)2014-02-27 14:14:58