并聯混合動力汽車控制策略的分析與研究
2016-11-22 08:32:31張勇斌
小型內燃機與車輛技術 2016年5期
張勇斌
(鄭州鐵路技師學院河南鄭州450041)
并聯混合動力汽車控制策略的分析與研究
張勇斌
(鄭州鐵路技師學院河南鄭州450041)
對基于能源短缺和環境惡化而開發的并聯混合動力汽車現狀進行了分析,研究了并聯混合動力汽車的系統結構和工作模式,同時研究了并聯混合動力汽車控制策略的設計原則及控制策略的現狀,對各控制策略的原理和優缺點進行了比較。
并聯混合動力汽車控制策略
引言
隨著社會經濟的發展,汽車已成為人們必不可少的交通工具,汽車給人類進步做出了巨大貢獻,但也給全球環境帶來了危害。面對日趨嚴峻的能源短缺和環境惡化問題,世界各國的汽車公司都在積極研究、開發和推廣電動汽車。電動汽車一般分為純電動汽車(EV)、燃料電池汽車(FCEV)和混合動力汽車(HEV)。從上世紀90年代開始,全球各大汽車公司首先把目光投放到純電動汽車上,但由于車用蓄電池能量密度低、質量較重,使純電動汽車續駛里程短且成本較高,很難大面積推廣。燃料電池汽車以通過電池反應生成的氫氣做為能源,目前控制存在困難且在使用中存在一定危險性,仍處于研究之中。混合動力汽車雖然沒有實現零排放,但其動力性、經濟性和排放性等綜合指標能滿足當前的苛刻要求,可以緩解汽車需求和環境污染及石油短缺的矛盾,所以混合動力汽車從90年代以來發展很快[1]。
1 并聯混合動力汽車的系統結構和工作模式[2]
混合動力汽車(HEV)將內燃機、電動機與一定容量的蓄電池通過控制系統組合形成一個系統,電動機可補充提供車輛起步、加速時所需扭矩,并可以存儲吸收內燃機富余功率和車輛制動能量,使發動機工作在最佳狀態,從而大幅度降低油耗,減少污染物排放。混合動力汽車按照驅動系統布置結構可分為串聯、并聯和混聯三類。串聯驅動模式目前幾乎沒人研究,混聯驅動十分復雜,目前各個國家主要研究并投入使用的是并聯混合動力汽車。并聯混合動力汽車的主要特點是發動機和電機根據路況扭矩的需求不同,同時或單獨驅動,發動機和電機通過不同的離合器與汽車傳動系統相連接,其系統結構如圖1所示。由于并聯混合動力汽車有兩套驅動系統,并且不同的驅動系統有不同的工作效率區間,這就決定了汽車在不同的行駛工況下,具有不同的工作模式。就汽車的正常行駛情況來看,主要有5種工作模式,如表1所示。
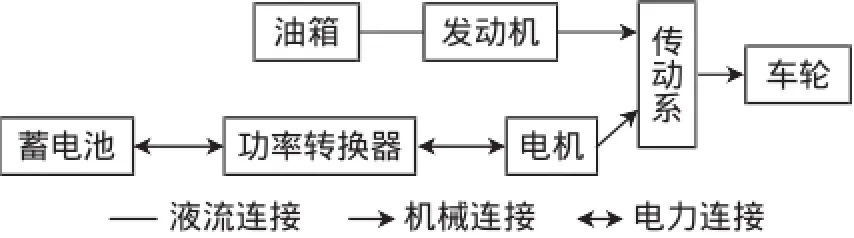
圖1 并聯混合動力汽車系統結構圖
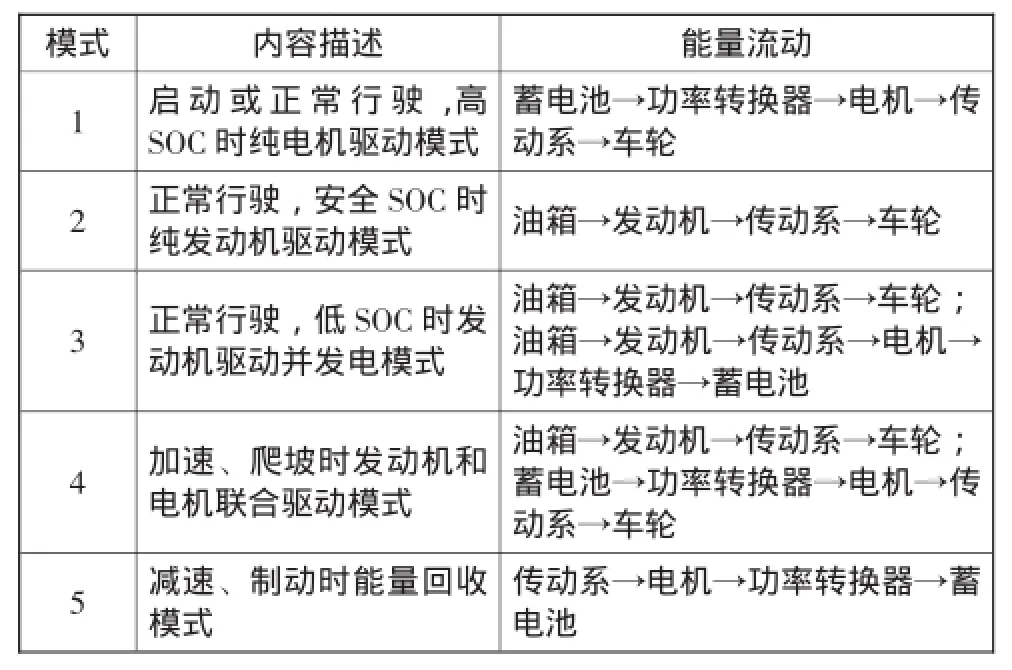
表1 并聯混合動力汽車工作模式及能量流動
2 并聯混合動力汽車控制策略的設計原則[3]
控制策略是混合動力汽車的核心。并聯混合動力汽車的5種工作模式如何進行轉換,在何種工況下實現兩種動力裝置的對接是并聯混合汽車的控制策略問題。它是根據駕駛員的意圖和行駛工況,協調各部件間的能量流動,合理進行動力分配,優化車載能源,提高整車的燃油經濟性,降低排放,在不犧牲整車性能的情況下,實現發動機和電機兩種動力之間的折中,是一個集機械、電器、化學和熱力學系統于一體的復雜而高度非線性動態系統。
并聯混合動力汽車控制策略總的設計原則是:
1)盡量使發動機在高效區工作,最好始終運行在經濟油耗區域。如圖2所示。
無論哪種發動機,在每一個轉速下,都有一個最省油工作點。把這些點連接起來,可得到一條最低油耗線,發動機運行在這條線附近最省油。在這個區域內,HEV只用發動機來驅動;在此區域之外,則視情況來確定控制策略。發動機的經濟油耗區域越小,發動機在兩種驅動之間的切換就越頻繁;若增大該區域,油耗會上升。因此,經濟油耗區的標定,需要綜合考慮并聯混合動力汽車的油耗和各零部件的使用壽命。
2)根據汽車的使用場合和常用工況設定最低車速,盡可能減少發動機的開關次數。從圖2可以看出,發動機在低轉速(1 500 r/min以下)和高轉速(4 000 r/min以上)時燃油消耗率都比較高。當轉速高時,電機本身的效率和輸出扭矩也不高,若使用電機進行扭矩補償,有些得不償失。在低轉速時,恰好發揮了電機低轉速、高扭矩的特點。所以,應標定一個最低車速,當車輛速度低于這個最低車速時,僅用電機驅動。對于這個最低車速應考慮兩點,一是電機的效率,二是能滿足車輛的扭矩需要和加速要求。
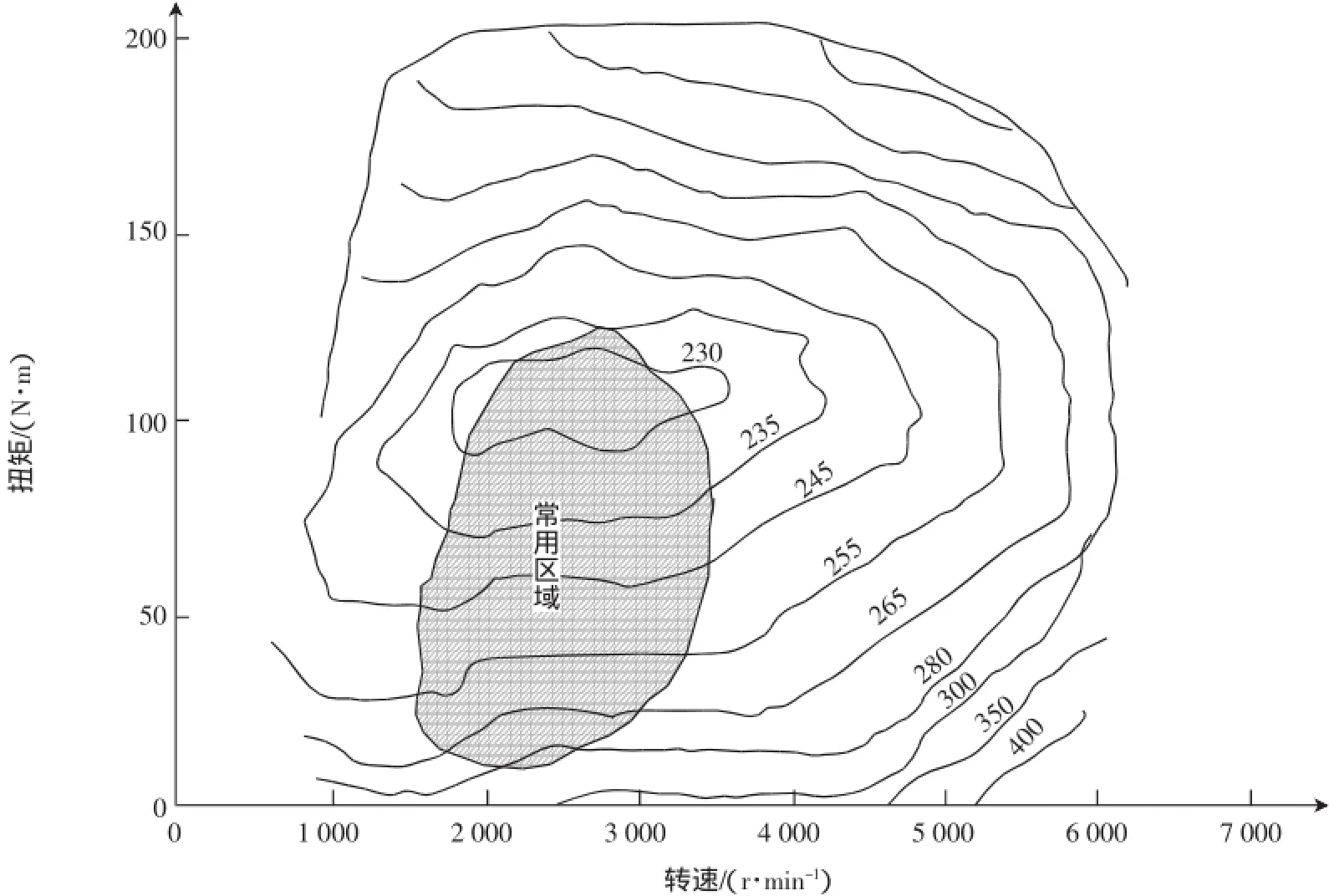
圖2 某發動機經濟油耗區域(常用區域)
3)選擇合適的電池SOC(荷電狀態,也叫電池剩余容量),并維持在一定范圍內。在一般情況下,SOC應盡可能高一些。用于公交車上的混合動力汽車經常在復雜的工況下頻繁加速,導致蓄電池快速放電,使SOC下降很快,對電池的壽命影響很大。但對電池SOC的選擇需考慮電池的容量、匹配以及發動機的功率等因素。
4)合理分配汽車所需功率,優化車載能源,提高各子系統間的能量流動效率。
5)動態性能好,有良好的自適應性和自學習能力。
3 并聯混合動力汽車控制策略的研究[4-5]
早期的控制策略大多是基于車速的控制,即設定一個車速作為發動機啟動的標準,依據瞬時工況車速判定整車的工作模式。當車速低于設定值時,發動機關閉,由電機單獨工作;當車速高于設定值時,發動機單獨工作;當車輪的負荷較大,汽車急加速或爬坡時,由發動機和電機聯合驅動車輪。這種基于車速的控制策略,比較簡單,容易被控制工程師理解,技術門檻低,所以在混合動力汽車開發初期得到較為廣泛的研究和應用。但它存在很多缺點,如控制參數單一,動態特性差,整車的燃油經濟性不是最優,沒有考慮排放,有時車速雖然高,但驅動力的要求很低,高速滑行或勻速行駛時,發動機工作負荷較低,效率不高。隨著技術的進步,現在的控制策略除了考慮車速(最低車速)外,同時考慮扭矩和功率的控制。目前已經提出的控制策略大致可以分為四類:基于規則的邏輯門限控制策略、瞬時優化控制策略、全局最優控制策略、智能控制策略等。
3.1 基于規則的邏輯門限控制策略
這類控制策略的主體思想是根據發動機的靜態效率曲線圖,通過控制整車功率需求、電池的SOC和加速信號等幾個變量,根據預先設定的規則,判斷并選擇混合動力系統的工作模式,使車輛運行在高效區,提高汽車的燃油經濟性。主要有電力輔助控制策略、發動機開關控制策略和最大電池SOC控制策略等。
3.1.1 電力輔助控制策略
電力輔助控制策略來源于數學中的平均值和方差概念,將整車的功率需求分為平均功率需求和動態功率需求兩部分。平均功率需求由發動機提供,動態功率需求由電機提供。由于傳統汽車在一般工況下所需要的平均功率為發動機峰值功率的20%左右,所以汽車行駛中發動機處于低效區工作,如果平均功率需求由運行在高效區的發動機單獨提供,而爬坡或加速時所需要的額外動態功率由電機提供,便可以大大提高整車的燃油經濟性。但由于電池SOC在不同的車輛工作模式下,需要其他的控制策略進行輔助才能達到預期的效果。
3.1.2 發動機開關控制策略
發動機開關控制策略也稱恒溫器控制策略,最早用于串聯式混合動力汽車上。當汽車在公路上高速行駛時,不需要頻繁地加減速,大大減少了使用電機驅動系統的概率,此時車輛功率需求常常低于發動機滿載時,即發動機具有一部分富余功率,使電池的SOC容易達到上限。為了避免發動機在低效區工作,此時應該關閉發動機,由電機單獨驅動汽車;當電池SOC達到設定的下限時,發動機啟動,由發動機單獨驅動,富余的功率用于給電池充電。
3.1.3 最大電池SOC控制策略
最大電池SOC控制策略的目標是使電池SOC盡可能維持在最高允許值附近,發動機盡可能運行,盡可能少地使用電機驅動。這種控制策略考慮了延長電池壽命,但額外增加了發動機的工作負擔,對減少燃油消耗的作用不大。
基于規則的邏輯門限控制策略算法簡單,容易控制,也具有很好的魯棒性。但沒有考慮工況的動態變化,不是最優的控制,也沒有考慮排放,當SOC低時需要進行充電,沒考慮電池充放電的能量損失。
3.2 瞬時優化控制策略
瞬時優化控制策略也叫實時控制策略[6]。目前有等效燃油消耗最少和功率損失最小兩種。
等效燃油消耗最少是在某一瞬時工況,將電機消耗的電量折算成發動機提供相同能量所消耗的燃油和產生的排放,加上制動回收的能量與發動機實際燃油消耗和排放,組成總的整車燃油消耗與排放模型,計算此模型的最小值,并選在此工況下最小值所對應的點作為當前發動機的工作點。
瞬時優化控制策略綜合考慮了油耗和排放,通過一組權值來描述各自的重要性,用戶可根據自己的要求來設定這組權值,實現燃油消耗和排放之間的折中。但需要大量的浮點運算,實現起來比較困難,成本高。對于制動產生的回收能量的預測需要建立精確的模型,既要對典型工況進行統計分析,又要實時判斷車況,實現也比較困難。
3.3 全局最優控制策略
全局最優控制策略是應用最優控制理論和最優化方法開發出來的混合驅動動力分配控制策略。其主要思想是基于某種優化理論,建立以整車燃油經濟性與排放為目標,系統狀態變量為約束的全局優化數學模型,運用相關的優化算法,求得最優的混合驅動動力分配控制策略。目前有基于多目標數學規劃、最小值原理和Bellman動態規劃理論等全局最優控制策略,發展還不成熟,主要用在標準行駛循環下,參考全局最優控制策略,對實時控制策略進行分析和評估,從中派生出適用的實時控制策略。
3.4 智能控制策略
智能控制策略是模仿人的智能,根據復雜被控動態過程的定性信息和定量信息,進行定性定量綜合集成推理決策,以實現對難以建模的復雜非線性不確定系統的控制。目前提出的智能控制策略有:神經網絡控制策略、模糊邏輯控制策略和遺傳算法控制策略等。
3.4.1 神經網絡控制策略
神經網絡是從微觀結構和功能上模擬人腦神經系統,對信息進行分布式存儲和并行處理的算法數學模型。在許多方面更接近人對信息的處理方法,有很強的逼近非線性函數的能力,并具有自學習功能,但采用的是典型的黑箱式學習模式,因此神經網絡所獲得的輸入、輸出關系無法以容易被人接受的方式表達出來。
3.4.2 模糊邏輯控制策略[7-8]
模糊邏輯控制的核心是模糊控制器。模糊控制器將各個傳感器發來的精確信號轉換成模糊量,根據專家制定的推理機制,應用基于控制知識與專家工程經驗的規則庫中的相關規則,得出模糊結論,作為控制指令,協調車輛各部件的能量流動,使整車的燃油經濟性和排放達到最佳。
模糊邏輯控制策略不需要精確的整車能量消耗數學模型,避免了常規控制方法中復雜的查表和插值計算,能夠提供相應速度和控制精度,解決復雜的非線性問題。可以對發動機、電機和蓄電池同時進行優化控制,盡可能使發動機在最優曲線上運轉。當電池SOC不足或過高,電機不能滿足整車扭矩要求時,發動機會改變最優工作曲線,保持電機工作高效和維持電池的SOC在其合理區間內變化。但在模糊推理過程中會增加模糊性,一方面在整個過程中,各變量的論域等級是固定的,控制規律是固定的,系統的動態特性較差,無法滿足不同駕駛員的意圖和不同路面環境下汽車的自動控制。另一方面對于復雜系統的模糊規則的建立還沒有確定的方法可以遵循,隸屬度函數的確定需要反復進行。
3.4.3 遺傳算法控制策略
遺傳算法是建立在自然選擇和自然遺傳學機理基礎上的迭代自適應概率性搜索算法。它能同時搜索空間的許多點,能夠快速全局收斂。遺傳算法的優化是對優化參數的集合進行編碼,不是對參數本身優化,其遺傳操作均在字符串上進行。遺傳算法對問題的適應能力強,只需要評價用的適應函數,不需要其它形式信息。
4 結論
目前提出的并聯混合動力汽車控制策略還不成熟,有待完善,只有基于工程經驗設計的邏輯門限控制策略在實際中得以應用。已開發的控制策略各具優點,互補性強,但都沒有達到最優。從不同的控制策略比較中,模糊邏輯控制策略實用性好,魯棒性強,能克服其它控制策略的不足,如果能與神經網絡相結合,具有很好的推廣價值。
1石舒婭.混合動力汽車市場發展階段研究[J].北京汽車,2010(3):5-11
2過學迅,張杰山,胡朝峰,等.日美混合動力汽車發展的比較研究[J].上海汽車,2006(3):7-10
3陸淵,許思傳,陸玉佩,等.并聯式混合動力汽車控制策略研究與仿真[J].上海汽車,2007(4):8-11
4鄧亞東,高海鵬,王仲范,等.并聯式混合動力電動汽車控制策略研究[J].武漢大學學報(工學版),2004,37(3):139-144
5劉金玲,宋健,于良耀,等.并聯混合動力客車控制策略比較[J].公路交通科技,2005,22(1):144-146
6白鳳良,楊建國.混合動力電動汽車實時控制策略[J].現代汽車動力,2003(3):7-10
7趙震,王鐵.并聯混合動力汽車模糊控制策略設計與仿真[J].北京汽車,2011(5):18-21
8段巖波,張武高,黃霞,等.混合動力汽車模糊邏輯控制策略仿真[J].內燃機工程,2003,24(2):66-69
Parallel Hybrid Electric Vehicle Control Strategy Situation and Analysis
Zhang Yongbin
Technician College of Zhengzhou Railway(Zhengzhou,Henan,450041,China)
This paper introduces the current situation of parallel hybrid electric vehicle developed based on the energy shortage and environmental worsening.The system configuration and operating mode of parallel hybrid cars are explained,as well as its control strategy and design principles.The principles and the advantages and disadvantages of each control strategy have been described and compared with each other.
Parallel,Hybrid electric,Vehicle,Control strategy
U469.72
A
2095-8234(2016)05-0074-04
2016-08-26)
張勇斌(1983-),男,講師,主要研究方向為設備綜合工程學和汽車節能。
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(2016年1期)2016-04-16 04:57:26
汽車與新動力(2015年1期)2015-02-27 12:11:01
決策探索(2014年21期)2014-11-25 12:29:50
汽車與新動力(2013年5期)2013-03-11 16:08:17