前橋擺轉(zhuǎn)轉(zhuǎn)向式四輪底盤液壓驅(qū)動系統(tǒng)方案優(yōu)化設(shè)計的研究
2016-11-29 13:54:42李志偉
制造業(yè)自動化 2016年2期
關(guān)鍵詞:系統(tǒng)
呂 瑩,張 靜,吳 瀟,李志偉,
(1.羅定職業(yè)技術(shù)學(xué)院,云浮 527200;2.華南農(nóng)業(yè)大學(xué),廣州 510642)
前橋擺轉(zhuǎn)轉(zhuǎn)向式四輪底盤液壓驅(qū)動系統(tǒng)方案優(yōu)化設(shè)計的研究
呂 瑩1,張 靜2,吳 瀟2,李志偉1,2
(1.羅定職業(yè)技術(shù)學(xué)院,云浮 527200;2.華南農(nóng)業(yè)大學(xué),廣州 510642)
前橋擺轉(zhuǎn)四輪底盤是一種可實現(xiàn)小轉(zhuǎn)彎半徑的底盤。在轉(zhuǎn)向時,通過控制前橋驅(qū)動輪的轉(zhuǎn)動,使前驅(qū)動橋主動圍繞著轉(zhuǎn)向裝置轉(zhuǎn)動,可以帶動底盤以任意角度轉(zhuǎn)向。根據(jù)擺轉(zhuǎn)式四輪底盤的功能要求確定了行走開式液壓系統(tǒng)的技術(shù)方案, 針對擺轉(zhuǎn)式四輪底盤的前輪差速轉(zhuǎn)向的特性提出了走開式液壓系統(tǒng)的主要功能模塊,進(jìn)而得出適合前橋擺轉(zhuǎn)轉(zhuǎn)向底盤的前輪的控制方式,為后續(xù)的擺轉(zhuǎn)式四輪底盤液壓系統(tǒng)設(shè)計計算方法和元件選型計算過程提供依據(jù)。
四輪底盤;轉(zhuǎn)向;前橋擺轉(zhuǎn)式;液壓驅(qū)動
0 引言
前輪偏轉(zhuǎn)轉(zhuǎn)向的拖拉機(jī)在松軟土地和水田中轉(zhuǎn)向困難是一種普遍存在的難題[1~5]。因此,很多拖拉機(jī)制造企業(yè)和研究人員都在致力研究減少轉(zhuǎn)向操縱力和減小轉(zhuǎn)彎半徑的兩個轉(zhuǎn)向問題。為了改善拖拉機(jī)轉(zhuǎn)向和操作方式,提高作業(yè)效率和使用安全性,提出了前橋擺轉(zhuǎn)轉(zhuǎn)向式四輪底盤的一種設(shè)計方案。根據(jù)前期的研究為了實現(xiàn)前橋擺轉(zhuǎn)轉(zhuǎn)向式四輪底盤的行走要求,本文通過對不同方案的分析,得出適合前橋擺轉(zhuǎn)轉(zhuǎn)向底盤前輪的動力傳動方式及設(shè)計方案。
1 前橋擺轉(zhuǎn)轉(zhuǎn)向底盤的轉(zhuǎn)向機(jī)理分析
1.1四輪底盤的行走工作要求
四輪底盤在設(shè)計功能上要滿足直行,左轉(zhuǎn)彎、右轉(zhuǎn)彎、倒退以及一定的調(diào)速范圍等基本要求,現(xiàn)今在實際生產(chǎn)上所使用的輪式底盤一般都適合在大中型地塊中作業(yè),而我國南方大部分地區(qū)的地塊主要均為小面積地塊,在這樣的地塊作業(yè)時輪式底盤不易轉(zhuǎn)彎,作業(yè)時間率較低,為此需要設(shè)計能夠在小地塊旱地或水田中進(jìn)行作業(yè)同時具有輕型、打滑率低、不雍泥雍水、轉(zhuǎn)彎半徑小等特點的農(nóng)機(jī)底盤。
1.2前橋擺轉(zhuǎn)四輪底盤的機(jī)理分析
為了研究主要在小地塊旱地或水田作業(yè),并具能夠進(jìn)行倒U型轉(zhuǎn)彎模式如圖1所示的作業(yè)方式的四輪底盤。需要設(shè)計一種高效率轉(zhuǎn)向的四輪行走底盤,而關(guān)鍵就是要解決轉(zhuǎn)彎半徑的問題,即轉(zhuǎn)彎半徑小。最理想的轉(zhuǎn)彎半徑是底盤寬度的一半,即轉(zhuǎn)動方向一邊的輪子的轉(zhuǎn)速應(yīng)該是零。這樣底盤車架轉(zhuǎn)彎的時候其前橋的外側(cè)輪就會圍繞內(nèi)測輪轉(zhuǎn)動,而內(nèi)測輪是原地轉(zhuǎn)動。并且能夠原地連續(xù)轉(zhuǎn)動180°。此種底盤在水田作業(yè)時,由于行走輪陷入土壤中一定深度,可免除前輪偏轉(zhuǎn)轉(zhuǎn)向方式存在的轉(zhuǎn)向力的問題。結(jié)合以上對四輪底盤作業(yè)等方面的要求,本課題組設(shè)計了前橋擺轉(zhuǎn)轉(zhuǎn)向四輪底盤。其結(jié)構(gòu)如圖2所示。擺轉(zhuǎn)式四輪底盤由兩個前驅(qū)動輪、轉(zhuǎn)向橋、機(jī)架以及安裝在機(jī)架上的兩個后輪(隨動輪)構(gòu)成。其中,轉(zhuǎn)向橋包括直接與兩前輪相連接的前橫梁,固定在前橫梁上的轉(zhuǎn)向機(jī)構(gòu)組成。轉(zhuǎn)向時,一個前輪停止行走,另一個前輪繼續(xù)行走帶動前橋繞停轉(zhuǎn)的前輪轉(zhuǎn)動,同時通過前橋中部與車架的連接鉸鏈帶動車架轉(zhuǎn)向。設(shè)計車架時,確保前橋的中心可作任意角度的轉(zhuǎn)動,同時還具有橫向浮動功能,就能確保底盤的四個輪子均能同時著地,實現(xiàn)四輪底盤在小地塊中能以小的轉(zhuǎn)彎半徑、小的地頭寬度進(jìn)行輕便和靈活轉(zhuǎn)向。前橋擺轉(zhuǎn)轉(zhuǎn)向底盤以液壓驅(qū)動代替了傳統(tǒng)的機(jī)械式傳動方式[7~9],并且取消了繁瑣的機(jī)械式轉(zhuǎn)向操縱機(jī)構(gòu)。兩個液壓馬達(dá)分別直接與底盤的兩前輪連接,將行走動力輸入兩個驅(qū)動輪,實現(xiàn)底盤的前進(jìn)后退和轉(zhuǎn)向,兩邊的行走輪可同時進(jìn)行正反轉(zhuǎn)或一邊停轉(zhuǎn),一邊正反轉(zhuǎn),實現(xiàn)轉(zhuǎn)彎動作。
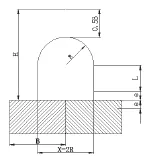
圖1 倒U型轉(zhuǎn)彎模式
圖中:E為地頭寬度,B為底盤輪距,L為底盤軸距,X為兩個工作行程間的距離,R為轉(zhuǎn)彎半徑,e為農(nóng)機(jī)具到輪軸的距離。
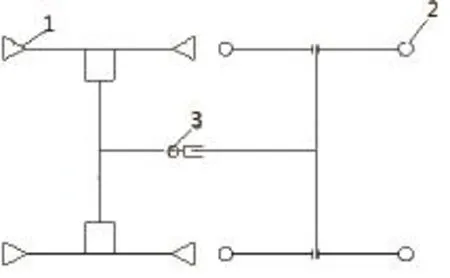
圖2 底盤結(jié)構(gòu)原理簡圖
2 轉(zhuǎn)向機(jī)理及其液壓系統(tǒng)設(shè)計
2.1底盤行走液壓系統(tǒng)設(shè)計方案一
根據(jù)底盤的行走及轉(zhuǎn)向方式的獨特要求,此套液壓系統(tǒng)中,兩個行走馬達(dá)是以串聯(lián)的形式接入油路,并且由同一個液壓馬達(dá)供油。由于閉式液壓系統(tǒng)中一泵只向一個液壓執(zhí)行元件供油,而開式液壓系統(tǒng)中一泵可以向多個液壓執(zhí)行元件供油,所以,本文采用開式液壓系統(tǒng)的方案[10]。其原理圖如圖3所示。
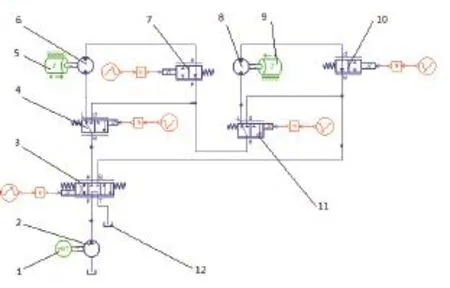
圖3 底盤行走的液壓系統(tǒng)
本套液壓系統(tǒng)的主要部件包括定量液壓油泵2、電磁換向閥3,4,7,10,11和擺線液壓馬達(dá)6,10。其中擺線液壓馬達(dá)能夠在底盤低速行駛下提供足夠大的驅(qū)動力矩,齒輪泵作為液壓系統(tǒng)的動力元件。當(dāng)發(fā)動機(jī)啟動后,油泵開始為液壓系統(tǒng)供油,通過控制電磁閥組的工作位置來制定底盤的行走狀態(tài)。底盤行走工況與閥的工作位置關(guān)系如表1所示。
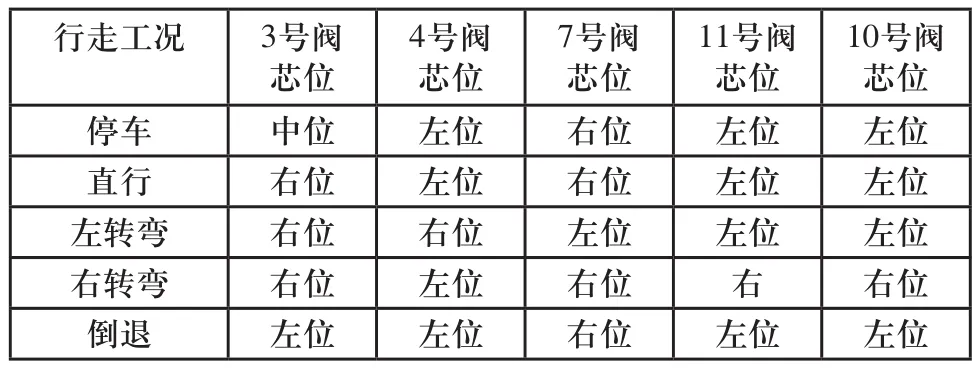
表1 方案一底盤行走工況與閥的工作位置關(guān)系
在執(zhí)行左轉(zhuǎn)彎操作時,三位四通換向閥3打開,并且需將圖中兩位三通閥4與電磁開關(guān)閥7視為一個工作閥組,即同時吸合或斷開電磁鐵。如此才能使底盤在進(jìn)行左轉(zhuǎn)向時,左輪能夠保持停止?fàn)顟B(tài),不會因為行走過程的慣性繼續(xù)向前行走。右轉(zhuǎn)彎的動作原理與左轉(zhuǎn)彎相同。
2.2兩前行走輪液壓系統(tǒng)設(shè)計方案二
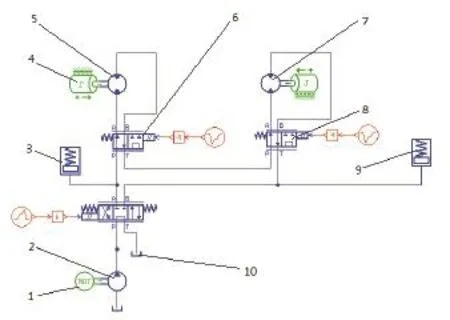
圖4 行走液壓系統(tǒng)原理圖
本套液壓系統(tǒng)的主要部件包括定量液壓油泵2、電磁換向閥6,8、緩沖油缸3,9和擺線液壓馬達(dá)。本套液壓油路與方案一的區(qū)別在于采用兩個相同的兩位四通閥6代替了方案一中的4、7組成的閥組的工作形式,并且在兩個馬達(dá)進(jìn)油路和回油路上分別裝有緩沖油缸3,9。底盤行走工況與閥的工作位置關(guān)系如表2所示。

表2 方案二底盤行走工況與閥的工作位置關(guān)系
【】【】
同樣,以底盤進(jìn)行左轉(zhuǎn)彎工況來分析。在執(zhí)行左轉(zhuǎn)彎操作時,三位四通換向閥打開,電磁閥6處于右位,以切斷馬達(dá)5的供油使左輪停止轉(zhuǎn)動,電磁閥8處于左位,馬達(dá)7得以繼續(xù)轉(zhuǎn)動以達(dá)到左轉(zhuǎn)向的目的。
2.3行走輪液壓系統(tǒng)方案
方案一與方案二均采用了馬達(dá)串聯(lián)式油路連接方案。液壓馬達(dá)串聯(lián)系統(tǒng)的功能是,可以通過控制電磁閥的工作位置來分配馬達(dá)的動力。當(dāng)兩個馬達(dá)同時接入油路時,兩驅(qū)動輪同時轉(zhuǎn)動,帶動底盤直線行走;當(dāng)切斷一側(cè)馬達(dá)的動力時,亦即使一側(cè)馬達(dá)接入油路,另一側(cè)馬達(dá)停止接入油路,即可實現(xiàn)底盤繞一側(cè)輪子轉(zhuǎn)動,達(dá)到轉(zhuǎn)向的目的。方案二與方案一的區(qū)別在于使用電磁閥6代替了方案一中的4、7組成的工作閥組,減少了系統(tǒng)液壓閥數(shù)量。液壓閥數(shù)目的減少能夠提高系統(tǒng)動作響應(yīng)速度,降低系統(tǒng)的壓力損失,緩沖油缸的作用是能夠降低底盤在啟動和制動過程中產(chǎn)生的壓力沖擊。因此,通過對比,底盤的行走液壓系統(tǒng)采用方案二的原理。
2.4試驗驗證

圖5 試驗樣機(jī)
1)通過對自行組裝的試驗樣機(jī)進(jìn)行實驗,得出樣機(jī)的性能參數(shù)如下:整機(jī)自重:350kg,外形尺寸(長×寬×高)1440×1440×900mm,行走速度1~15km·h-1,最大驅(qū)動扭矩450N·m,最小轉(zhuǎn)彎半徑(相對前橋中心)0mm。
2)液壓系統(tǒng)可實現(xiàn)底盤的前行、轉(zhuǎn)彎、后退功能,并能夠達(dá)到前橋擺轉(zhuǎn)式轉(zhuǎn)向的轉(zhuǎn)彎方式。
3)底盤在進(jìn)行地頭掉轉(zhuǎn)時大大簡化了轉(zhuǎn)向操作,在掉頭時所需地頭長度最小為2200mm,掉頭時間為7.2s~11.8s,電磁閥動作時間小于100ms時,轉(zhuǎn)向過程平穩(wěn)。底盤在行走速度越快,底盤所需轉(zhuǎn)彎時間越短。
3 結(jié)束語
前橋擺轉(zhuǎn)式轉(zhuǎn)向系統(tǒng)通過采用前橋中部通過垂直轉(zhuǎn)軸與縱向水平轉(zhuǎn)軸相結(jié)合的結(jié)構(gòu)設(shè)計方案,可確保前橋繞垂直轉(zhuǎn)軸作任意角度的轉(zhuǎn)動,同時前橋在水平方向作一定角度的浮動,確保四輪能夠同時著地;通過對前橋擺轉(zhuǎn)底盤行走輪液壓控制系統(tǒng)的優(yōu)化,為擺轉(zhuǎn)式四輪底盤液壓系統(tǒng)設(shè)計計算方法和元件選型優(yōu)化計算提供依據(jù)。
[1] 馮啟高,毛罕平.我國農(nóng)業(yè)機(jī)械化發(fā)展現(xiàn)狀及對策.農(nóng)機(jī)化研究[J].2010,2:245-247.
[2] 劉有貴.輪式拖拉機(jī)轉(zhuǎn)向困難的原因[J].湖南農(nóng)機(jī).2003,05(30).
[3] 徐志堅,宋艷琪.對小型輪式拖拉機(jī)發(fā)展前景的思考.農(nóng)業(yè)裝備[J],2008:24-26.
[4] 陳香香.水旱輪作區(qū)現(xiàn)代化田間工程模式研究[D].揚(yáng)州大學(xué),2005.
[5] 陳濟(jì)勤.農(nóng)業(yè)機(jī)器運用管理學(xué)(第二版)[M].北京:中國農(nóng)業(yè)出版社,1995:15-35.
[6] 張揚(yáng).鉸接撞在機(jī)轉(zhuǎn)向系統(tǒng)動力學(xué)分析與研究[D].吉林:吉林大學(xué),2006.
[7] 呂瑩,吳瀟,符耀明,李志偉.四輪底盤轉(zhuǎn)向方式對工作行程率影響的研究[J].農(nóng)機(jī)化研究,2015,5:71-74.
[8] 曾愛平,邱秀麗,趙娜,李志偉.液壓后驅(qū)式輕型農(nóng)機(jī)水田自走底盤的設(shè)計[J].農(nóng)機(jī)化研究.2010,7:149-151,159.
[9] 呂瑩,吳瀟,符耀明,李志偉.前橋擺轉(zhuǎn)轉(zhuǎn)向式四驅(qū)底盤結(jié)構(gòu)形狀指數(shù)的優(yōu)化[J].農(nóng)機(jī)化研究.2015,6:33-36.
[10] 韓慧仙,曹顯利,劉茂福.全液壓起重機(jī)行走液壓系統(tǒng)設(shè)計[C]. PEITS 2010.(512-515).
[11] Wang guo-ye,liu zhao-du,ma yue-feng,et al. Reasearch on bispeed front Axle of four-wheel drive tractor[J].Agricultural Engineering International, 2011, 13(3):56-58.
[12] S.Kim, K.Park, H.J.Song, Y. K. HWang, S. J. Moon, H. S. Ahn and M.Tomizuka. Development of control logic for hydraulic active roll control system[J].International Journal of Automotive Technology,2012,(13):87-95.
Research on the hydraulic system design of front axle swing sowing four-wheel chassis
LYU Ying1, ZHANG Jing2, WU Xiao2, LI Zhi-wei1,2
TH12
A
1009-0134(2016)02-0132-03
2015-11-13
呂瑩(1982 -),女,遼寧本溪人,講師,博士,研究方向為農(nóng)業(yè)機(jī)械裝備及設(shè)施。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32