寶馬車總線特性及故障快速診斷技巧(一)
2016-12-01 13:07:00江蘇省無錫汽車工程中等專業學校214153吳書龍
汽車維護與修理 2016年5期
江蘇省無錫汽車工程中等專業學校(214153) 吳書龍
寶馬車總線特性及故障快速診斷技巧(一)
江蘇省無錫汽車工程中等專業學校(214153)吳書龍
1 總線系統概述
寶馬車將總線系統分為主總線和子總線。主總線(表1)系統負責控制單元之間跨系統的數據交換,其中包括診斷、編程和設碼等系統功能。子總線(表2)系統負責某個功能分組內的數據交換,主要采用BSD和 LIN總線。由表1和表2可以看出,不同總線系統的數據傳輸速率和傳輸方法不同,為確保不同總線系統之間各控制單元之間的通信,用網關作為總線系統之間的接口,使數據交換成為可能,中央網關模塊(ZGM)負責將信息從一個總線系統傳遞至另一個總線系統。隨著駕駛人輔助系統和舒適娛樂系統的普及,車上電子裝置和控制單元越來越多,為便于數據的交換和管理,寶馬車總線系統經歷了多次演變(圖1)。最新的控制單元集中方案將ZGM集成在BDC內,通過星形連接器連接方式使所有主總線系統相互連接,將不同協議和數據傳遞速率的信息轉換到其他總線系統上,使各總線系統提供的信息可以綜合利用。另外,ZGM通過以太網可將編程數據傳輸到車輛上。

表1 寶馬車主總線

表2 寶馬車子總線
2 常見總線特性及故障快速診斷技巧
下面從K-CAN、LIN、PT-CAN、FlexRay四種常見總線的特性進行分析,歸納出總線故障快速診斷的技巧。
2.1 K-CAN(車身-CAN)總線特性分析及故障快速診斷技巧

圖1 寶馬車總線系統的演變
K-CAN 電路如圖2所示,K-CAN數據傳輸率為100 kBit/s,采用雙絞線結構,通過中央網關模塊(ZGM)與其他總線系統相連,一般分成2條并聯電路。K-CAN通過總線來喚醒,無需附加喚醒導線;K-CAN使用的是邏輯電阻,沒有終端電阻。K-CAN正常時,K-CAN-H的電壓為0.2 V,K-CAN-L的電壓為4.8 V,其正常波形如圖3所示,K-CAN-H在0 V~4 V變化,K-CAN-L在5V~1 V變化。

圖2 K-CAN電路
當K-CAN-H和K-CAN-L互短、并聯電路總支上任意一根總線對搭鐵或對電源短路時,K-CAN可單線運行,車輛快測后,控制單元樹中沒有不通信的控制單元(一般不通信的控制單元顯示黃色,如圖4所示),但都會出現與該并聯電路相關的很多故障代碼(圖5),此時可以通過測量波形進行故障區分:如果K-CAN-H和K-CAN-L的波形重合(圖6),則說明2根線互短;當其中一個波形正常變化,另一個波形為電源電壓或0 V時,說明該總線對電源或對搭鐵短路(圖7和圖8)。
當K-CAN并聯電路總支上2根總線同時磨斷或網關內相關部分損壞時,K-CAN總線無法運行,車輛快測后控制單元樹中所有相關控制單元不通信(一般模塊不通信的控制單元顯示黃色,如圖9和圖10所示),并且會出現與K-CAN 不通信相關的故障代碼(圖11)。
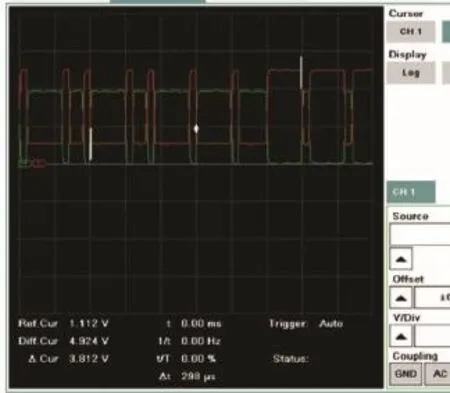
圖3 K-CAN的正常波形(截屏)

圖4 K-CAN并聯電路總支上單一總線故障在車輛快測后控制單元樹狀態(截屏)

圖5 K-CAN并聯電路總支上單一總線故障列表(截屏)

圖6 K-CAN-H和K-CAN-L互短的波形(截屏)
當K-CAN并聯電路分支上某一控制單元任意一根總線對搭鐵或對電源短路時,K-CAN可單線運行,車輛快測后控制單元樹中沒有不通信的控制單元(一般不通信的控制模塊顯示黃色,如圖4所示),但會出現與該控制單元相關的故障代碼(如圖12)。同樣,可以通過測量波形進行故障區分:當其中一個波形正常變化,另一個波形為電源電壓或0 V時,說明該總線對電源或對搭鐵短路(如圖7和圖8)。

圖7 K-CAN-H對電源短路的波形(截屏)
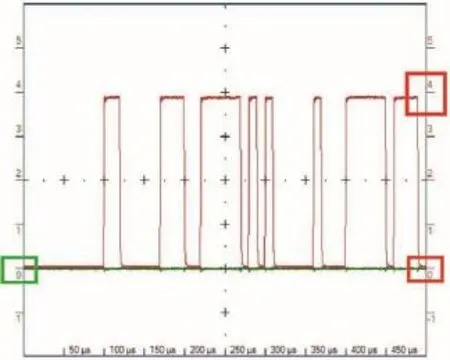
圖8 K-CAN-L對搭鐵短路的波形(截屏)

圖9 K-CAN上某一并聯電路不通信在車輛快測后控制單元樹狀態(截屏)
當K-CAN上某一控制單元自身2根總線同時磨斷或控制單元內相關部分損壞時,與該控制單元相關的K-CAN總線無法運行,車輛快測后控制單元樹中該控制單元不通信(一般不通信的控制單元顯示為黃色,如圖13所示),并且會出現與該控制單元K-CAN 不通信相關的故障代碼(如圖14)。
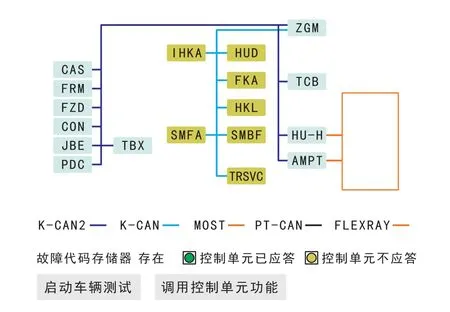
圖10 K-CAN上網關不通信在車輛快測后控制單元樹狀態(截屏)

圖11 K-CAN并聯電路總支上不通信故障列表(截屏)

圖12 K-CAN并聯電路分支上某一總線故障列表(截屏)
2.2 LIN總線特性分析及故障快速診斷技巧
LIN是一個單線系統形式的子總線,實現主控單元和副控制單元之間快速、安全的通信,例如腳部空間控制單元至駕駛人側車門開關組和外后視鏡的連接(圖15)。其供電電壓和信號傳輸電壓與蓄電池電壓相同。在 LIN 總線系統中,始終僅安裝一個主控制單元,最多可以連接 16個用戶(即所謂的副控制單元)。沒有規定的總線結構,數據傳輸速率為9.6 kBit/s~19.2 kBit/s,由于數據傳輸速率小,無需終端電阻。
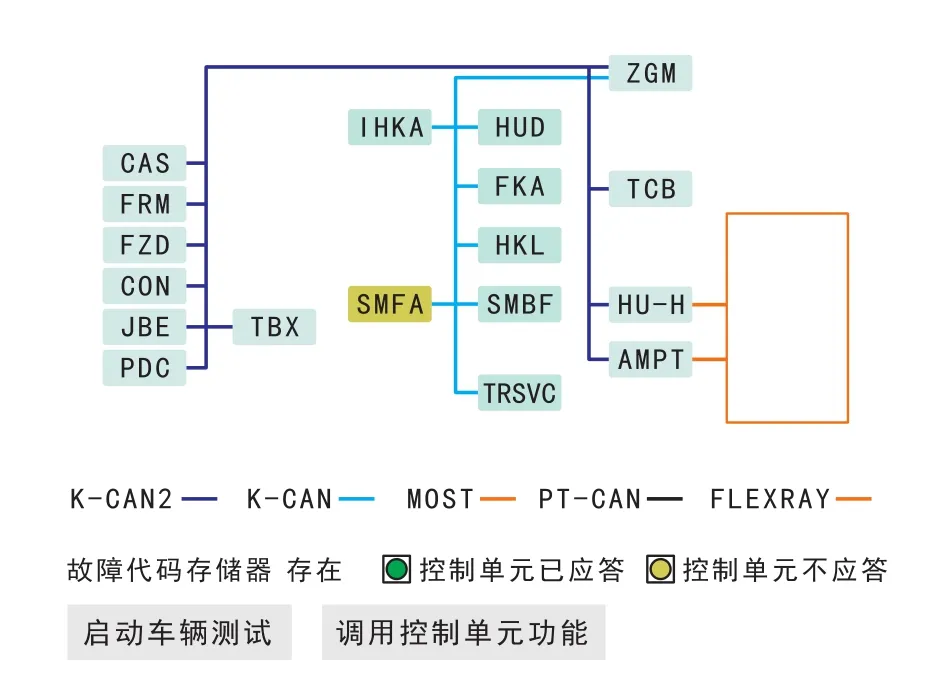
圖13 K-CAN上某一控制單元不通信在車輛快測后控制單元樹狀態(截屏)

圖14 K-CAN并聯電路分支上某一控制單元不通信故障列表(截屏)
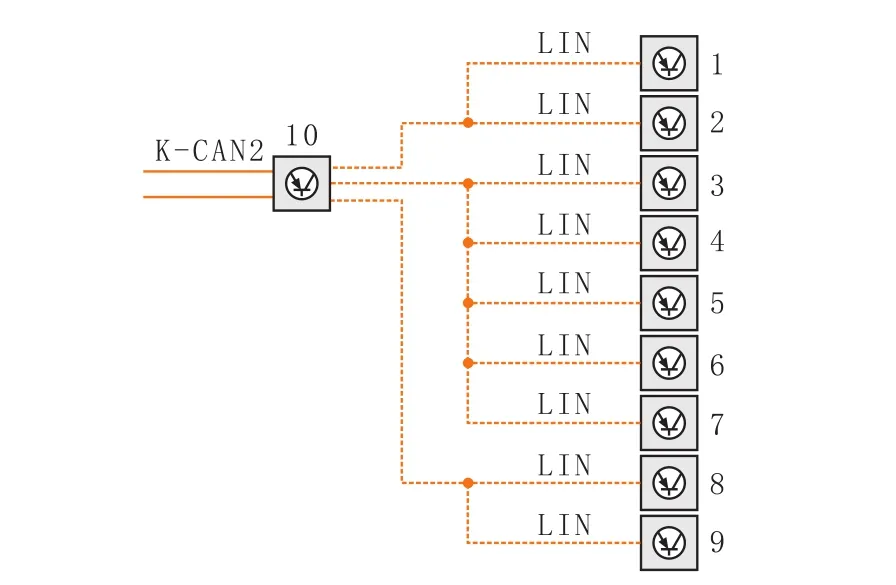
圖15 腳部空間控制單元(FRM)LIN總線示例
當LIN總線相關組件上出現故障時,需要根據電路圖執行相關元件的動作測試和狀態查詢。如果狀態查詢或元件動作測試成功執行,則LIN 總線上的通信無故障,在這種情況下無需在相關 LIN總線上執行其他故障查詢。如果狀態查詢或元件動作測試不成功,針對相關組件和伺服機構需要根據電路圖檢查 LIN總線相關組件的供電和搭鐵連接情況;當供電和搭鐵均正常時,需要測量LIN總線波形(圖16)。
針對LIN總線上的控制單元不通信且供電和搭鐵均正常時,測量LIN總線波形,如圖17所示,在 LIN 總線上識別到一個恒定的占優勢地位的信號時,需進一步測量相關LIN 總線導線是否對正極和搭鐵短路、是否斷路及相關連接器連接是否接觸不良。
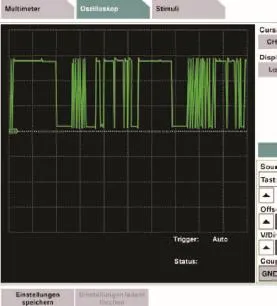
圖16 LIN總線正常波形(截屏)

圖17 LIN總線故障波形(截屏)
(未完待續)
(2016-04-10)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50