重載組合列車的分布式魯棒H協同控制方法
2016-12-01 08:31:57寧雅麗王亮軍李國寧劉雨佳
自動化儀表 2016年1期
寧雅麗 王亮軍 李國寧 劉雨佳
(甘肅廣播電視大學理工學院1,甘肅 蘭州 730030;蘭州交通大學自動化與電氣工程學院2,甘肅 蘭州 730070;濟南鐵路局3,山東 濟南 266000)
?
重載組合列車的分布式魯棒H協同控制方法
寧雅麗1王亮軍2李國寧2劉雨佳3
(甘肅廣播電視大學理工學院1,甘肅 蘭州 730030;蘭州交通大學自動化與電氣工程學院2,甘肅 蘭州 730070;濟南鐵路局3,山東 濟南 266000)
針對重載組合列車在復雜地形路況存在通信延遲、通信短時中斷以及擾動的問題,提出了一種重載組合列車多機車間的分布式魯棒協同控制器。在重載組合列車縱向動力學模型的基礎上,結合其實際運行特點,設計了協同控制器。該控制器在滿足各子系統期望性能指標的同時,可使所有子系統準確地跟蹤期望運行速度。仿真實例表明了所設計控制器的穩定性和魯棒性。
重載組合列車 分布式協同控制 魯棒控制 通信延遲 縱向動力學模型
Longitudinal dynamics model
0 引言
20世紀50年代,重載鐵路運輸出現后,由于其具有運能大、效率高、運輸成本低等優點,一出現就受到世界鐵路大國的重視,我國于2004年在大秦鐵路開行了2萬t重載組合列車。
目前大秦線采用GE公司的機車無線同步操控技術(LOCOTROL), 實現組合列車的同步操作[1]。但是由于大秦線的線路環境復雜多變,控制命令通過GSM-R進行傳輸時容易產生延遲以及短時中斷,使得同步操控模式下重載組合列車間的縱向作用力過大,甚至導致出現斷鉤事故。目前的研究方法主要集中于同步操作模式的優化。耿志修等針對中載列車的同步控制提出了網絡化無線機車同步操作方法[2];Kayser C等提出了一種電控空氣制動(ECP)列車縱向動力學模型的建立和驗證方法,并通過南非運煤專線的采集數據進行了驗證[3]。上述研究提出了動力分布式控制下的優化思路,但是并沒有考慮控制方式在各種擾動和不確定參數影響下系統的可靠性問題。
本文研究了在通信延時、通信短時中斷以及測量數據不精確等因素下,重載組合列車的分布式協同控制的魯棒性問題。
1 重載組合列車縱向動力學型
重載組合列車通過GSM-R實現各子機車系統的通信,完成各子系統的同步牽引和制動等操作,各相鄰子系統之間存在耦合作用,其影響的大小和所處軌道環境有直接關系。
縱向受力分析時,整個列車可以簡化為由彈性阻尼裝置連接的剛性質點模型。縱向作用力可以表述為:

(1)
(2)
9.98sinθiMi+0.04DiMi
(3)
式中:ki、di分別為車鉤緩沖裝置的彈性系數和阻尼系數;C0、C1、C2為通過實驗獲得的阻力常數;θi為第i個子系統所處軌道的坡度角;Di為軌道的曲度;RL為軌道的曲線半徑;dwheelbase為輪對的間距。它們之間的關系可以表示為Di=0.5dwheelbase/RL。
2 分布式魯棒協同控制器的設計
2.1 模型變換
假設:
(4)
式中:Li,i-1為常數;i=2,…,n,它是第i個子系統與第i-1個子系統間的距離。定義Fti=Fwi+Fdbi+Fbi-FTRi,和式(3)一起代入式(1),可得:
(5)

2.2 控制器設計

(6)

設計的魯棒H協同控制律為:
(8)

(9)
重載組合列車的分布式魯棒H協同控制問題可以描述為:對于指定的性能指標γ>0,在設計的控制律下滿足:擾動w(t)=0時,滿足0)=0,此時重載組合列車各子系統漸近跟蹤列車給出的控制命令;擾動w(t)≠0時,重載組合列車滿足‖Tws‖<γ,其中‖Tws‖是Tws的H范數,Tws是重載組合列車系統擾動w到s的傳遞函數矩陣。
2.3 穩定性和魯棒性分析
定義2 若函數β(zi,zi):R2→R,且對所有的zi,zj∈R,存在一些正的局部一致有界函數β′(·,·),使方程滿足:
β(zi,zj)=β′(zi,zj)(zi-zj)成立,則β(zi,zj)是正增益的對角準線性函數。
引理2 如果有向圖G(ν,ε,Λ)鄰域矩陣Λ能使系統滿足:
(10)

3 仿真分析
考慮在通信延遲、通信中斷和理想情況下,各子系統追蹤期望速度的特性,對比分析本文設計的分布式魯棒協同控制器和集中式同步操控控制器的響應性能。仿真環境選取大秦線真實場景,采用SS4B型常用機車,編組模式選用“1+2+1”式(1臺機車+100節車輛+2臺機車+100節車輛+1臺機車)。
仿真參數如表1所示。

表1 仿真參數表
為簡化仿真,假定4臺機車參數、200節車輛參數和所有緩沖器的參數各自相同,假定車輛之間的連接是剛性的,該車輛就可以看作是由4個子系統組成的,子系統之間通過GSM-R進行數據交換,有向圖是一個固定拓撲結構的強連通圖,其鄰域矩陣為4階的單位矩陣。由于大秦線重載列車運行速度較低,所以可以忽略風阻和曲線阻力造成的影響。大秦線某區段實際期望速度如圖1所示。通信噪聲選用均值為0,方差為1的隨機變量,H性能指標取γ=1。
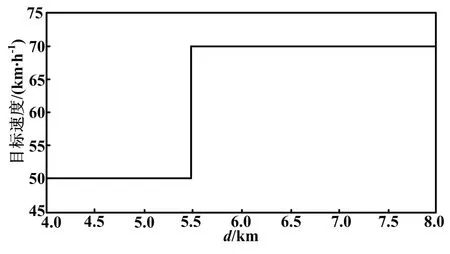
圖1 大秦線某區段期望運行速度
圖2為分布式控制器在理想條件下,4個子系統追蹤期望速度的特性曲線,可以看到各個子系統能很好地跟隨期望速度,但是由于各機車之間存在相互的作用力,所以達到期望速度之后還會存在微小波動。圖3為在分布式控制器在通信中斷條件下的速度追蹤特性,只要通信有向圖保證是連續完備的,則分布式協同控制器就會趨向漸進穩定。從圖3可以看出,在穩定狀態時若有通信中斷故障,追蹤速度偏差會增大,子系統之間的作用力也變大。圖4是在存在通信延時的情況下,分布式魯棒協同控制器和文獻7中設計的集中式控制器追蹤速度的特性曲線;由于重載組合列車的通信延時一般在0~2 s之間變化,所以文中設置各子系統的通信延時均為0~2 s之間的隨機值,在此選取1號子系統的追蹤特性為例分析兩者的特性,盡管圖中兩種控制器都能跟隨期望速度,但是可以看到分布式魯棒H協同控制器的調整時間明顯比集中式短。根據統計數據表明,在延時狀態時,追蹤速度偏差是理想時的7.5倍。圖5為系統性能‖s(t)‖2和擾動‖w(t)‖2的瞬間變化,給出了在強連通通信拓撲下的重載組合列車的系統性能,表明系統實現了H的性能指標。
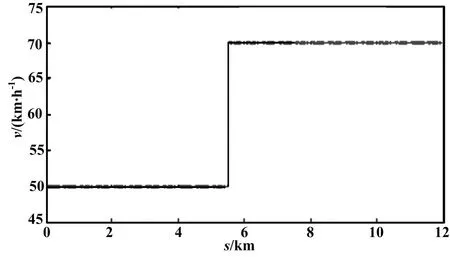
圖2 理想條件下分布式控制器的速度追蹤特性
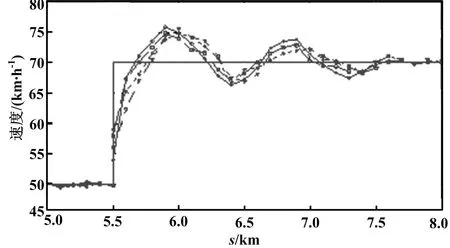
圖3 有通信中斷的分布式控制器的速度追蹤特性
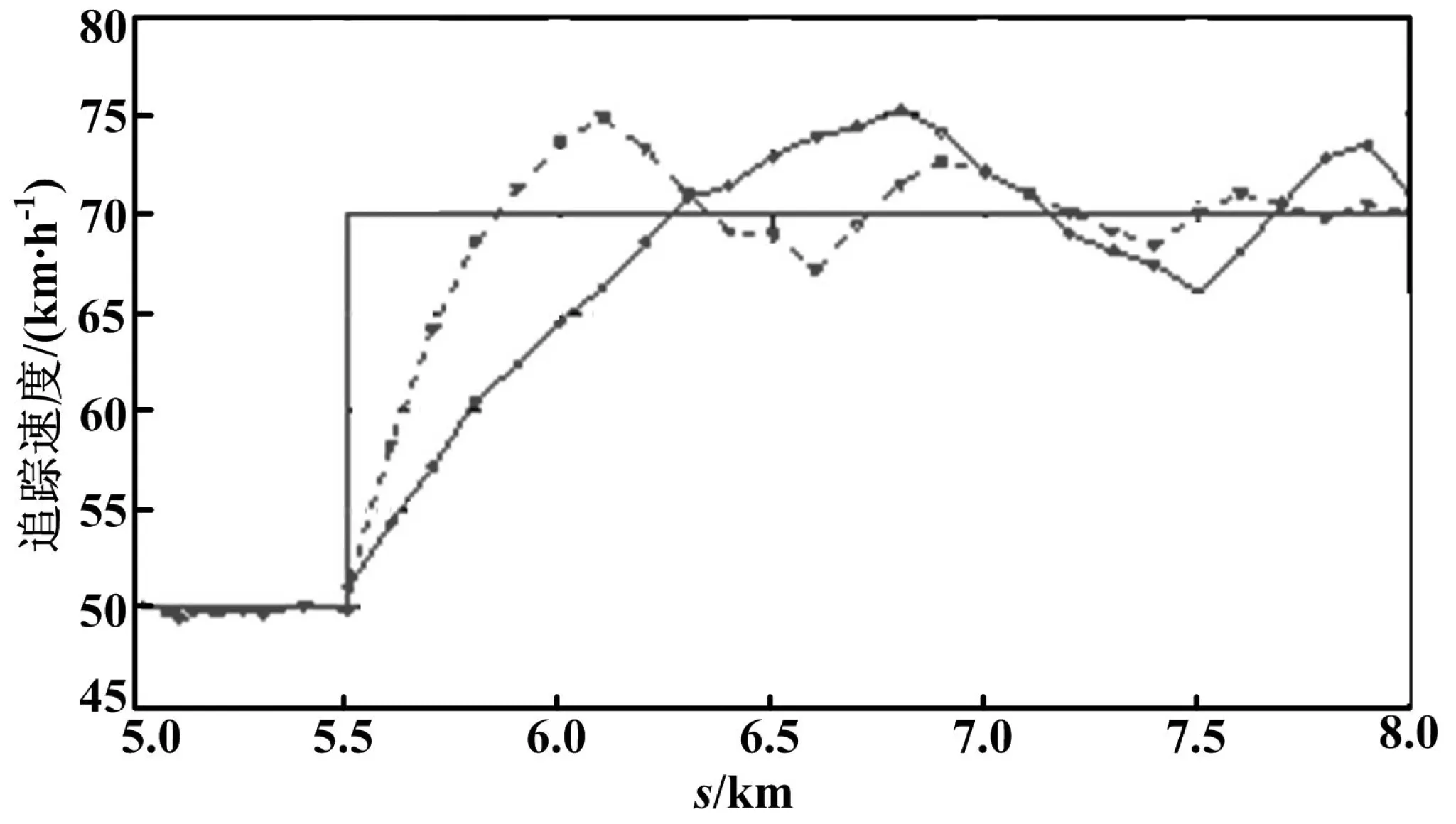
圖4 通信延時條件下分布式與集中式速度追蹤特性
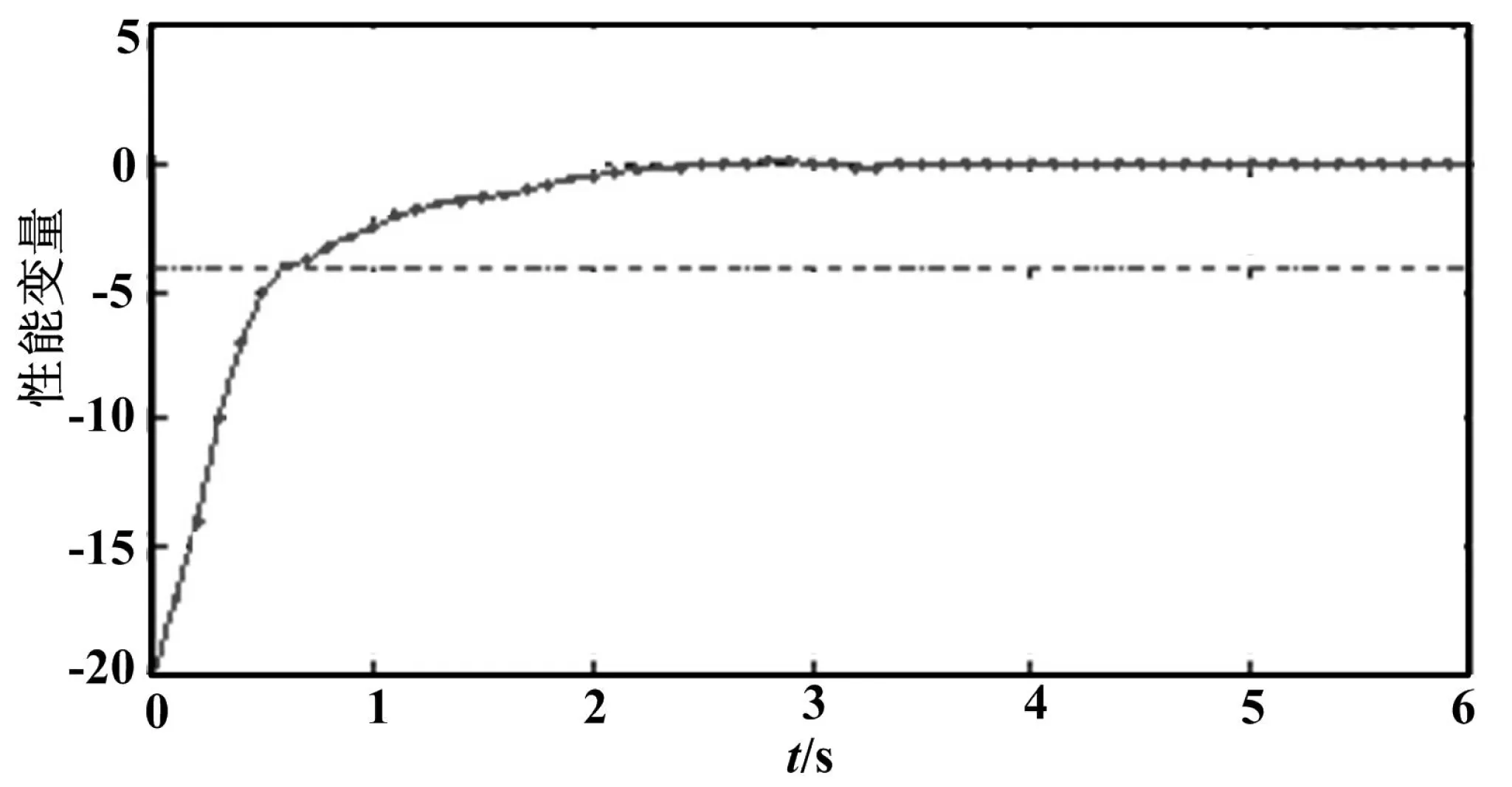
圖5 H性能特性曲線
4 結束語
本文分析了重載組合列車通信在強連通有向圖下,分布式魯棒協同控制器在理想情況、存在通信延時、擾動以及通信中斷時的控制效果。仿真結果表明,各子系統都能夠在滿足H的性能指標的基礎上,漸進地跟隨列車期望速度,而且該控制方法具有更強的魯棒性,能更好地使重載組合列車在各種惡劣環境因素條件下運行,提高了列車操控的安全性和可靠性。
[10]Cao Y,Yu W,Ren W,et al.An overview of recent progress in the study of distributed multi-agent coordination[J].Industrial Informatics,IEEE Transactions on,2013,9(1): 427-438.
[11]李勇. 航空發動機分布式控制系統H∞魯棒控制研究. 南京:南京航空航天大學, 2013.
[12]劉佳, 陳增強, 劉忠信. 非線性多智能體系統分布式魯棒輸出調節. 復雜系統與復雜性科學, 2012(1):8-15.
[13]Zhang F, Luh P B, Santos E. Performance study of multi-agent scheduling and coordination framework for maintenance networks// Intelligent Robots and Systems, IEEE/RSJ International Conference on. IEEE, 2004:2390-2395.
[14]鄭陸海,郭鑫鑫,李新強,等.分布式發電系統并網交流器防孤島檢測技術研究.電器與能效管理技術,2014(17):32.
Distributed Robust HCooperative Control Method of Heavy Haul Combined Train
Aiming at the problems of communication delay,communication interruption in short time and disturbances when heavy haul combined trains run under complex topographic road conditions,the distributed robust cooperative controller among multiple locomotives of heavy haul combined train is proposed. On the basis of longitudinal dynamics model of heavy haul combined train,combining with its practical operating features,the cooperative controller is designed.The expected performance indexes of each subsystem are met by the controller,in addition,all the subsystems may accurately track expected running velocity.The simulation examples demonstrate the stability and robustness of the controller designed.
Heavy-haul combined train Distributed cooperative control Robust control Communication delay
甘肅廣播電視大學2014年度科研基金資助項目(編號:2014-ZD-01)。
寧雅麗(1963-),女,1983年畢業于西北師范學院物理專業,獲學士學位,副教授;主要從事非線性建模、智能計算方面的研究。
TH-3;TP13
A
10.16086/j.cnki.issn1000-0380.201601007
修改稿收到時間:2015-07-20。
