NCS系統時延控制及仿真研究
2016-12-10 07:55:26徐博李喜武
安徽電子信息職業技術學院學報 2016年5期
關鍵詞:系統
徐博,李喜武,2
(1.吉林農業大學工程技術學院,吉林長春130118 2.蘇州工業職業技術學院,江蘇蘇州215104)
NCS系統時延控制及仿真研究
徐博1,李喜武1,2
(1.吉林農業大學工程技術學院,吉林長春130118 2.蘇州工業職業技術學院,江蘇蘇州215104)
針對網絡控制系統的網絡時延問題進行研究,并分析網絡時延對系統性能的影響。從時延因子、影響時延的因素和網絡協議的選擇等方面考慮,建立時延分析與評估模型,并對模型進行仿真處理與分析。將不同丟包情況下MATLAB的階躍響應曲線進行對比,結果證明在無時延無丟包的情況下系統性能最佳,在無時延丟包10%到45%的情況下網絡控制系統的性能會逐步降低直至無法正常工作。
網絡控制系統;網絡時延;丟包;系統性能
網絡控制系統(Networked Control Systems,簡稱NCS)的性能指標主要包括時延、帶寬、吞吐量和穩定性等方面[1]。文獻[2-3]將網絡控制作為信息傳輸手段,考慮了網絡時延問題;文獻[4]中Broekett引入最小注意控制概念降低控制律對時間和狀態反饋的依賴;文獻[5-6]研究了網絡延時小于一個采樣周期的短時延NCS的穩定性及控制器設計問題。
一、網絡控制系統的結構
網絡控制系統是一種分布式控制系統,利用網絡通信實現磁場傳感器之間地理分布信息的交換,并通過控制器和執行器實現對控制對象的閉環實時反饋,可以實現資源共享和遠程控制[7]。
由于網絡通信帶寬的限制,系統中的所有節點共享,當傳感器、控制器、執行器和通過網絡交換數據,多通道數據傳輸、數據碰撞、多包傳輸、網絡擁塞、網絡連接中斷是不可避免的,這使得網絡控制系統中存在的一些特殊問題,如不確定的數據傳輸,隨時間變化的傳輸周期等,這些問題往往使NCS損失完整性、因果關系和不確定性[8]。NCS控制結構如圖1所示。
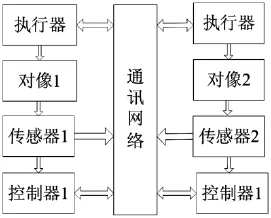
圖1 NCS控制結構圖
二、NCS時延控制策略
(一)時延因子
在NCS系統中的時延主要包括以下兩種類型:一是網絡引起的延遲;二是為完成系統功能和計算時間,傳感器節點設備和處理系統耗時,如執行器,由于采樣周期很小,常忽略不計[9]。因此NCS系統時延主要指網絡時延,其影響因素大致包括發送時延、傳播時延、處理時延和排隊時延等。
發送時延t1指發送數據時第一幀到最后一幀的耗時,其公式為:

式中:L表示數據幀長度,d表示信道寬度。
傳播時延指信號波在信道中傳輸所耗時長t2,公式為:
式中:S表示信道長度;v表示波速。
處理時延t3指主機或路由器對接收到的信號進行分段處理的耗時。
排隊時延t4指信號的分組在輸入隊列中排隊等待處理和在輸出隊列中排隊等待轉發時的耗時。
綜上,總的網絡時延T為:

(二)影響時延的因素
根據網絡時延因子可知,在傳輸過程中時延主要受網絡協議和節點驅動方式控制,即當采用時間驅動時,需要在節點設置緩沖區,等到動作時間到來時立刻開始動作;當節點用事件驅動的時候,一有數據到來就立馬發送。在數據發送過程中,時延主要受帶寬和網絡狀態控制,如果網絡空閑,即使是低速網絡對于信息量很大的控制信息這部分時延依然不大;但數據包一旦發生沖突或者丟包時,延時將成倍的增加,這對控制系統的穩定性十分不利。
選擇適合控制系統的網絡協議,不僅確保信息在網絡中暢通的傳輸,還能在網絡繁忙時將數據包沖突減小到最低,將時延控制在可接受范圍內。
(三)網絡協議的選擇
現代制造系統的主要包括:信息系統網絡體系結構(SI),離散事件網絡單元(DEC)的連續網絡和網絡設備(CVD),典型結構如圖2所示。
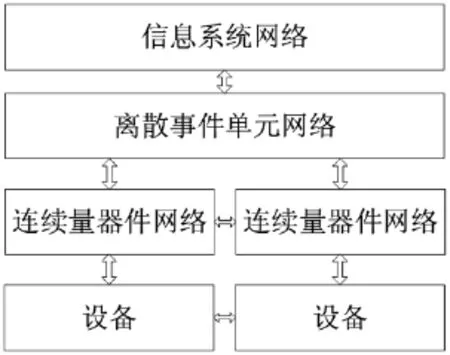
圖2 現代制造系統典型網絡結構
網絡控制的訪問介質主要包括以太網(Ethernet)、令牌網(Token-passing Bus)和總線網
(CAN Bus)三種[10],各協議的優缺比較如表1所示。
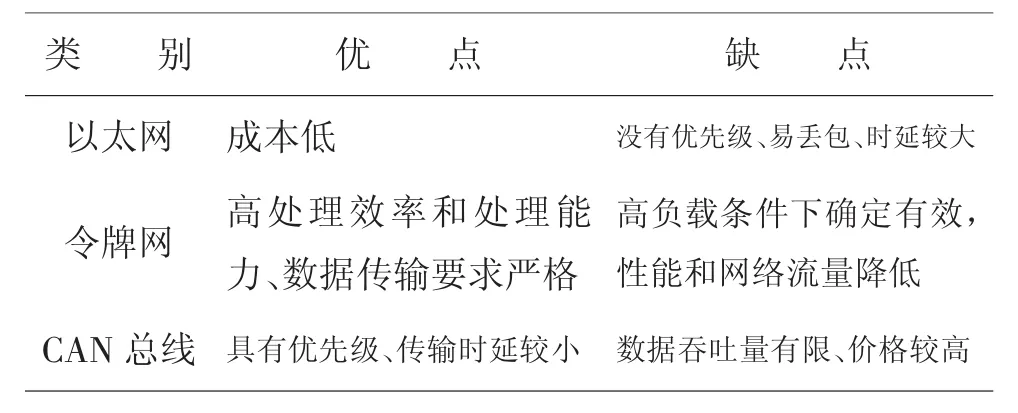
表1 網絡協議優缺比較表
在不同的環境條件下,綜合分析所需傳輸的數據量和時延要求,選擇合適的網絡協議。
三、時延分析與評估
對以太網的時延性能進行分析。設阻塞時間Tblock是由于消息沖突導致重發的等待時間,難以準確描述,Nr是退避節點數,Na是在時刻t有新消息發送節點數,并且Na≤N-Nr。沒有產生新消息發送的概率是e-λ,因此非退避節點傳輸消息的概率為pa= 1-e-λ。此外,對于退避節點基于BEB算法其傳輸消息的概率是pr=2-i,這里i表示第i次傳輸失敗。在任意時間間隔內當前節點j是唯一要發送新消息的節點概率為:

式中:Naj表示除節點j以外的所有有新消息發送的節點。在任意時間間隔內當前節點j是唯一發送消息的退避節點概率為:

式中:Nrj表示除節點j以外的所有退避節點,沒有節點發送消息的概率為:

同時超過兩個節點發送消息,包括退避和非退避的,其概率為:

令經過i次沖突后退避時間的期望按照時間片個數描述為f(i)。經過i次沖突等待0,1,2,…,(2i-1)個時間間隔的概率是相同的都為2-i。因此,f(i)的表達示為:

為了描述整個的期望阻塞時間,令Θk是第一次請求發送消息到第k次退避時間,因此,有下式:

顯然沒有沖突的Θ0=0。根據BEB算法,如果i= 1,…,10那么fi=f(i),如果i=1,…,15,那么fi=f(10)。Gk表示為前面k-1次退避時間Θk-1與第k次退避所花時間f(k)Tslot的和。因此一個新產生消息在第k沖突退避時間的數學期望模型:
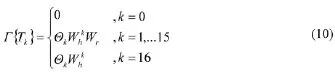
式中:Wkh表示該節點在第k次網絡上有兩個以上節點發送消息的概率,Qr表示該節點發送退避消息的概率。所以具體的阻塞時間如下式:

式中:Tresid表示節點離開隊列準備發送消息的時間,Γ{Tk}是第k次沖突退避時間的數學期望;Γ {Tk}由退避的和非退避節點的數量以及每個節點新消息的產生速率決定。十六次沖突后,節點放棄消息并向上層報告錯誤信息。從以上分析,以太網的Tblock放棄了該消息的延遲時間可能是無限的。如果能對傳感器網絡進行采樣,采樣數據比發送數據的速度快,網絡將會飽和;如果這些數據不被丟棄,會繼續增加輸入數據緩沖區。
四、仿真分析
針對網絡控制系統的時延問題,利用實時仿真工具箱TrueTime對系統實時性能的影響率和信息傳輸的采樣間隔進行研究,調節通信網絡性能綜合評價參數,從而提高設備運行安全性。
在某一系統中采用以太網傳輸,調度使用prioFP策略,數據率為106B/s,PID控制算法。其Simulation模型如圖3所示。
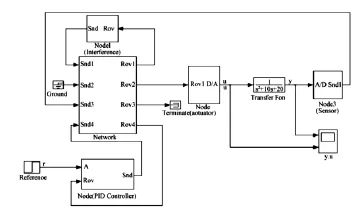
圖3 仿真模型
由于網絡的使用,系統存在丟包和網絡時延,導致系統不穩定。分別針對無丟包無時延、無丟包有時延、有丟包無時延且丟包率為10%和45%時的系統性能進行仿真分析得到圖4。

圖4-1無丟包無時延

圖4-2無丟包有時延

圖4-3無時延丟包10%

圖4-4無時延丟包45%
由仿真結果分析可知,在無丟包無時延的條件下,系統控制性能較好,達1.2左右,且響應速度極快;在無丟包有時延的條件下,系統性能良好,在1.0左右,響應速度較快;當丟包在10%且無時延的條件下,控制系統的性能一般,小于1,且相應速度較慢;當丟包在45%左右時,系統性能紊亂,不能正常工作。
五、結語
本文針對基于實時仿真分析的網絡化控制系統進行了研究,驗證了時延對網絡控制系統的穩定性能的影響。結果表明,當時延超過45%時,網絡控制系統會由于丟包過多而無法進行正常的工作。
[1]田中大,李樹江,等.網絡控制系統的動態權重變采樣周期調度算法[J].哈爾濱工業大學學報,2016,(4):114-120.
[2]趙晶,秦雅娟,等.控制與轉發分離的工業無線網絡資源調度技術[J].北京交通大學學報,2016,(2):15-21.
[3]曹慧超,李煒.執行器飽和不確定NCS非脆弱魯棒容錯控制[J].控制與決策,2013,(12):1874-1883.
[4]劉于之,李木國,等.具有時延和丟包的NCS魯棒H_∞控制[J].控制與決策,2014,(5):17-522.
[5]Daniel López-Echevarría,Mario E.Maga?a.Neural Network and Observer-Based Compensation of Networked Control Systems with Packet Dropout[J].IFAC Proceedings Volumes,2013,(29):31-37.
[6]L.Wang,L.Wu,X.Lin,Y.Zhang, H.Zhou, X.Du,G.Dong.Dysfunctional default mode network and executive control network in people with Internet gaming disorder: Independent component analysis under a probability discounting task[J].European Psychiatry, 2016, (34): 36-42.
[7]A.Lakshmi Sangeetha,N.Bharathi,A.Balaji Ganesh.Performance validation of a cascade control system through various network architectures[J].Egyptian Informatics Journal, 2016,(1):1-9.
[8]葛愿.基于隱馬爾可夫模型的網絡化控制系統建模與控制[D].中國科學技術大學,2011.
[9]郭程程.基于網絡控制系統環境的系統辨識算法研究[D].大連理工大學,2013.
[10]沈志萍.網絡環境下反饋控制系統的分析與設計[D].華南理工大學,2013.
(責任編輯:魏樹峰)
Research on the Time-Delay Control and Simulation of NCS System
XU Bo1,LI Xi-wu1,2
(1.The College of Engineering and Technology,Jilin Agricultural University,Changchun 130118,China; 2.Suzhou Vocational Institute of Industrial Technology,Suzhou 215104,China)
The time delay of network control system is studied,and the system performance affected by time delay on the network is analyzed.Based on the time-delay factors and the choice of the network protocol,a time-delay analysis and evaluation model is designed.The model is also simulated and analyzed.The MATLAB step response curves under different situations of packet loss are compared.The results show that the system performs best when there is no packet loss or delay.On the contrary,the performance will be gradually reduced or even can not work normally when the packet loss ranges from 10%to 45%.
network control system;network delay;packet loss;system performance
TP393
B
2016-07-15
徐博(1989-),男,吉林公主嶺人,碩士,研究方向:智能化檢測與控制技術。E-mail:xuboboapple@163.com.
1671-802X(2016)05-0018-04
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32