實現(xiàn)芯片高精度拾放的設計要點分析
2016-12-12 08:18:24侯一雪張晨曦曹國斌
電子工業(yè)專用設備 2016年11期
侯一雪,張晨曦,王 雁,曹國斌
(中國電子科技集團公司第二研究所,山西 太原 030024)
實現(xiàn)芯片高精度拾放的設計要點分析
侯一雪,張晨曦,王 雁,曹國斌
(中國電子科技集團公司第二研究所,山西 太原 030024)
以全自動精密組裝設備為例,從設備的機械結構、控制結構、軟件設計、工藝設計等方面,對芯片拾放精度的影響因素做了詳細分析,并指出解決辦法。這些理論和方法可在全自動貼片機、點膠機、晶圓芯片拾取機等設備中進一步驗證。
芯片拾放;影響因素;高精度
現(xiàn)代電子技術的發(fā)展要求微組裝設備制造技術不斷推進,在國外通常是先進的設備成就了先進的工藝,一代設備引領了一代工藝。目前微電子行業(yè)組裝的最小芯片尺寸約為0.2 mm左右,全自動貼片設備對位精度一般為±10 μm左右,在降低效率的前提下,有要求更高的精度達到±1 μm,因此小芯片高精度的拾放要求對設備拾放技術提出更高層次的挑戰(zhàn)。芯片拾放技術是微組裝設備的基礎功能,點膠、共晶、倒裝等工藝完成的前提條件是芯片的精確拾放。
精密組裝系統(tǒng)是近年來新興的微組裝設備,具有高精度、高速度、多功能的特點,其中實現(xiàn)芯片高精度拾放是設備的核心技術。精密組裝系統(tǒng)適用于微波器件、光電器件等微電子組裝中的共晶、點膠、倒裝貼片工藝,實現(xiàn)微電子器件后道封裝中的芯片與基板互聯(lián)。同時設備具備多種微電子封裝常用的上料方式,如華夫盤、晶圓上料。本設備采用高精度運動部件與視覺系統(tǒng)自動定位方式,結合先進的控制系統(tǒng)協(xié)同完成芯片與基片自動拾放,可實現(xiàn)高精度、多種封裝功能,以滿足微電子器件多種工藝技術要求。本文以精密組裝系統(tǒng)設備為例,分析了影響芯片拾放精度的主要因素、設計要素,并指出對應的解決措施。
精密組裝系統(tǒng)拾放精度設計為±10 μm,最終實際檢測的最高精度為±2.307 μm。
1 拾放機構的運動精度
精密組裝系統(tǒng)拾放機構的運動精度決定于x、y、z、θ軸的運動精度。運動精度受結構設計、部件裝配、電機選擇、參數(shù)設置與控制模式的影響。在本設備中y軸選用懸臂結構,x軸穩(wěn)定的固定在鋼結構與蜂窩板支撐的平臺上,y軸懸臂結構通過斜拉支架固定在x軸上,z軸、θ軸固定于y軸動子。結構形式如圖1所示。此結構使吸頭與相機的運動穩(wěn)定、靈活,難度是懸臂結構的設計,包括材料的選擇、電機匹配與質量對結構的影響。
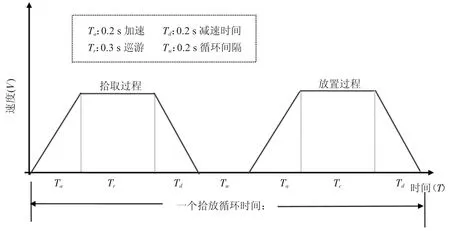
圖2 x軸運動曲線圖
計算電機負載要考慮的因素之一為負載質量,這里設定為50 kg;RMSForce(持續(xù)推力)的安全系數(shù)增加20%~30%,特別是在忽略摩擦力和反向作用力的時候。
根據以下公式可以計算出電機所應達到的加速度、最大速度、峰值推力值。通過這些參數(shù)選擇合適的電機。
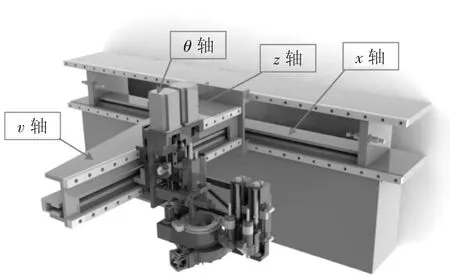
圖1 拾放機構示意圖
1.1x、y、z、θ軸電機與控制方式選型
執(zhí)行機構與控制方式也是影響芯片拾放精度的重要因素
本機x、y軸電機選用目前較先進的直線電機加光柵反饋的控制方式。下面以x軸直線電機的選型為例,說明選型計算方法。
根據拾放運動特點,拾放效率以2 000個/h往返動作為目標,每個拾放動作用時1.8 s,x軸行程900 mm,其運動曲線如圖2所示。



由公式1、公式2、公式3和運動曲線及已知參數(shù)可以得出:電機可達到的最大速度Vmax為2.5 m/s,加速度為12.5 m/s2,峰值推力PF為625 N,持續(xù)推力為346 N。
根據以上參數(shù)選擇x軸電機,y軸的選型方法同上。根據運行響應速度與分辨率要求,選用分辨率為0.1 μm直線光柵。通過以上配置x、y軸的重復定位精度用激光干涉儀測試,滿足重復定位精度±0.5 μm的要求。
z、θ軸根據安裝空間與運動行程,以及控制精度要求,選用了伺服系統(tǒng)加光柵反饋的方式。由控制程序完成二次閉環(huán)控制,光柵尺的最小分辨率為0.1 μm,使用這套控制系統(tǒng)與執(zhí)行機構可以達到重復定位精度±0.3 μm。
1.2拾取頭結構與裝配
芯片貼片和倒裝焊工藝對貼片壓力控制要求非常高,壓力控制范圍:0.098~3.922 N。芯片材料輕、薄、小,且易碎,其上電路圖形復雜,施加的壓力過大會對芯片本身造成傷害,過小影響焊接質量;z軸上包括視覺探頭、壓力檢測裝置、8工位轉塔頭,結構復雜,要實現(xiàn)壓力分辨率0.0196 N,難度較大。因此貼片壓力的精確控制是重要因素之一。
本設備壓力控制采用小導程絲杠推進方式,壓力傳動裝置與伺服電機精密反饋配合,吸嘴柔性緩沖等多項措施,配合z軸精確控制系統(tǒng),實現(xiàn)了±0.0196 N的壓力控制精度。
2 視覺系統(tǒng)精度
決定拾放精度的第二個重要因素是視覺系統(tǒng)的精度,本機為視覺系統(tǒng)分配的最高精度是±2.5 μm。視覺系統(tǒng)是為設備植入的眼睛,它的定位精度直接影響到最終定位精度。
本設備采用了新穎的雙視覺、雙鏡頭切換方案,由仰視相機(或稱LookUp)和俯視相機(或稱LookDown)的兩個鏡頭(或稱Mag1、Mag2)組成3個視場。俯視相機在拾放過程中定位目標位置,通過對檢驗孔的校驗定位仰視相機的機械位置;仰視相機校驗俯視相機與拾取吸頭間的相對位置坐標、像素尺寸、視場坐標與機械坐標關系的系數(shù),校驗拾放過程中的角度偏移參數(shù)。
視覺的定位精度受相機鏡頭參數(shù)、光源、安裝位置、算法等因素的影響。
本設備的視覺定位需經過表1中的數(shù)據校驗:
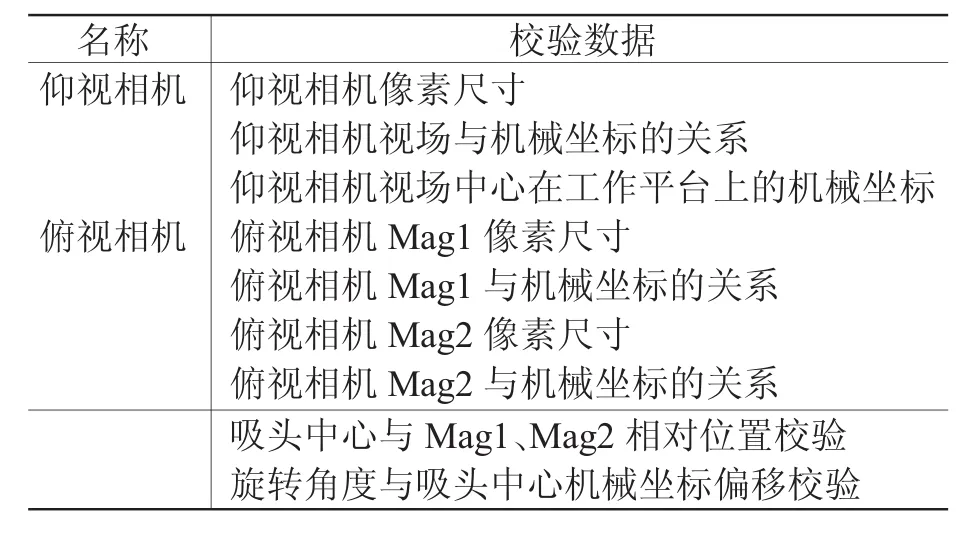
表1 相機校驗數(shù)據
以像素校驗為例,每個相機都應進行像素檢驗,俯視相機配置不同放大倍數(shù)的鏡頭,像素大小也不同,精確測量出像素尺寸對于達到系統(tǒng)精度是很重要步驟之一。
三個視場(Mag1、Mag2、LookUp)測試像素尺寸的方法基本一樣,唯一的區(qū)別是成相對像的所處位置不同。俯視相機(Mag1、Mag2)的成相對像是工作平臺上的一處固定參照物;仰視相機(LookUp)的成相對像是吸頭吸取的一個校驗片。
由于視場坐標系與機械坐標系平面必然存在角度,因此像素校驗分x方向和y方向兩步。選取視場中圖像的某一點,分別在x方向左右移動某個位移,原則是這個位移量不能出視場,分別記錄不同位置的視場坐標和機械坐標,經過相對位置公式計算,可得出x方向視場與機械坐標的夾角及x方向的像素尺寸。同理,對y方向單獨進行像素校驗。
本視覺系統(tǒng)的最終精度最高能達到1個像素偏差,一個像素校驗后的尺寸為0.86 μm。
3 控制軟件
控制軟件是設備的大腦,它要處理大量執(zhí)行部件發(fā)來的請求并進行數(shù)據處理,協(xié)調各運動部件的邏輯動作。軟件需完成芯片的自動拾取與放置,共晶焊接或自動點膠粘接,倒裝放片等功能。上料方式為晶圓上料或華夫盤上料。晶圓上料通過自動拾取裝置完成從晶圓上取片功能;華夫盤上料需人工提前放置裝有芯片或基板的華夫盤到上料臺上,然后由拾取裝置拾取。為了配合完成自動定位功能,通過視覺系統(tǒng)示教完成初始數(shù)據設置,控制軟件存儲了運動參數(shù)與邏輯順序。軟件具備的主要功能有系統(tǒng)初始化、示教功能、參數(shù)設置、診斷功能、軸測試及其它單元功能測試、校驗功能、自動工藝過程運行功能、維護功能等。
控制軟件要實現(xiàn)與圖像采集卡、溫控模塊、運動控制卡、數(shù)字量及模擬量數(shù)據采集卡的數(shù)據通訊,同時具備接受界面輸入的參數(shù),經過運算、控制邏輯,完成設備的控制。為了保證軟件控制的可靠性,需配備診斷功能、維護功能。為保證數(shù)據的真實性、高精度,需配備示教功能、校驗功能。
4 結 論
通過系統(tǒng)分析,結構設計與裝配通常是影響芯片拾放精度的主要原因,視覺與控制軟件的影響在設備驗證的前期就會顯現(xiàn)出來,與工藝緊密配合,改進后在長期運行中出現(xiàn)問題的概率較小。而結構設計與裝配的影響通常要經過長期的磨合才能發(fā)現(xiàn),而有一些設計是不可逆的,因此,在設計之初,結構設計的理論分析與經驗顯得尤為重要。
[1]黃波.全自動共晶粘片機實時多目標識別的實現(xiàn)[J].微計算機信息,2010,22(25):299-300.
[2]沈海寧.高精度全視覺貼片機的系統(tǒng)軟件設計與實現(xiàn)[J].機械設計與制造,2010,(06):85-87.
[3]張世浩.貼片機視覺系統(tǒng)校正技術研究[M].哈爾濱:哈爾濱工業(yè)大學,2014.
The Influencing Precision Factor Analysis of Picking and Placing Chip Equipment
HOU Yixue,ZHANG Chenxi,WANG Yan,CAO Guobin
(The 2ndResearch Institute of CETC,Taiyuan 030024,China)
The paper is directed against the Ultra-Precision Assembly Workcell's mechanical structure、electric control、software、progress design,discusses the Influencing Precisely Factor.And points out the resolving method.They can apply to accurately picking and placing chip.These methods is appropriate for Die Bonder、Dispenser machine、Wafer Die Picking and Placing machine,etc.
Picking and placing chip;Influencing factor;High-precision
TH248
B
1004-4507(2016)11-0034-04
2016-09-14
侯一雪(1972-),女,高級工程師,主要從事微組裝電子專用設備及工藝技術的研發(fā)工作。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中國特種設備安全(2022年6期)2022-09-20 02:52:28
經濟技術協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
工業(yè)設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
消費者報道(2014年7期)2014-07-31 11:23:57