干涉儀測向技術(shù)研究
2016-12-13 05:15:29趙小華梁廣真
艦船電子對抗 2016年3期
趙小華,梁廣真
(中國船舶重工集團(tuán)公司第723研究所,揚州 225001)
?
干涉儀測向技術(shù)研究
趙小華,梁廣真
(中國船舶重工集團(tuán)公司第723研究所,揚州 225001)
干涉儀測向具有測向精度高、靈敏度高、觀測頻帶寬等特點,因而在電子對抗、雷達(dá)等領(lǐng)域中廣泛應(yīng)用。但是相位干涉儀的弱點是測角的線性范圍小,當(dāng)角度超過其不模糊視角時容易產(chǎn)生相位模糊。針對相位模糊問題,提出了參差基線法、虛擬基線法2種解模糊方法,并通過仿真實驗比較其解模糊能力。
干涉儀測向;解模糊;參差基線法;虛擬基線法
0 引 言
現(xiàn)代戰(zhàn)爭是高科技的戰(zhàn)爭,電子對抗對戰(zhàn)爭勝負(fù)有著至關(guān)重要的作用,其中對敵方雷達(dá)的情報偵察更是電子對抗的關(guān)鍵。在現(xiàn)代空間高科技技術(shù)支撐下,電子偵察衛(wèi)星可以在不受區(qū)域國界限制的情況下,對針對地區(qū)的輻射源進(jìn)行偵察定位,從而掌握敵方雷達(dá)的技術(shù)參數(shù)、指標(biāo)和分布情況[1]。
電子偵收是通過電子偵察設(shè)備取得敵方軍事情報,以便我軍進(jìn)行電子進(jìn)攻和電子摧毀。電子偵收是對敵方軍事電子設(shè)備輻射的電磁信號進(jìn)行截獲、檢測、分析、識別、定位,以便確定敵方軍事電子設(shè)備及相關(guān)平臺對己方的威脅程度,為己方指揮決策和電子戰(zhàn)裝備設(shè)計提供情報支援[2]。
相位干涉儀的測向精度比較高,廣泛應(yīng)用于電子偵察領(lǐng)域。相位干涉儀只能在[-π,π]范圍單值測量相位差,但單基線相位干涉儀存在測向精度和最大不模糊角度之間的矛盾。傳統(tǒng)的解模糊方法是利用長短基線結(jié)合的辦法,要求短基線長度小于λmin/2,但對于高頻信號,λmin會非常小,這將會導(dǎo)致低頻率信號在各個陣元之間的耦合,造成波達(dá)角測向精度和分辨率的降低[3]。更為嚴(yán)重的是:干涉儀陣元本身的物理尺寸由信號的最長波長決定,這使得在最小半波長的空間內(nèi)無法安裝2個陣元,即傳統(tǒng)方法很難在工程上實現(xiàn)。
為了解決干涉儀測向中存在的相位模糊問題,提出了參差基線法、虛擬基線法這2種解模糊方法,分析其優(yōu)缺點并通過仿真實驗比較其解模糊的能力。
1 單基線干涉儀測向
經(jīng)典的干涉儀測向系統(tǒng)一般由4個部分組成:測向天線陣、多波道接收機、測向處理單元和遙控設(shè)備,如圖1所示。
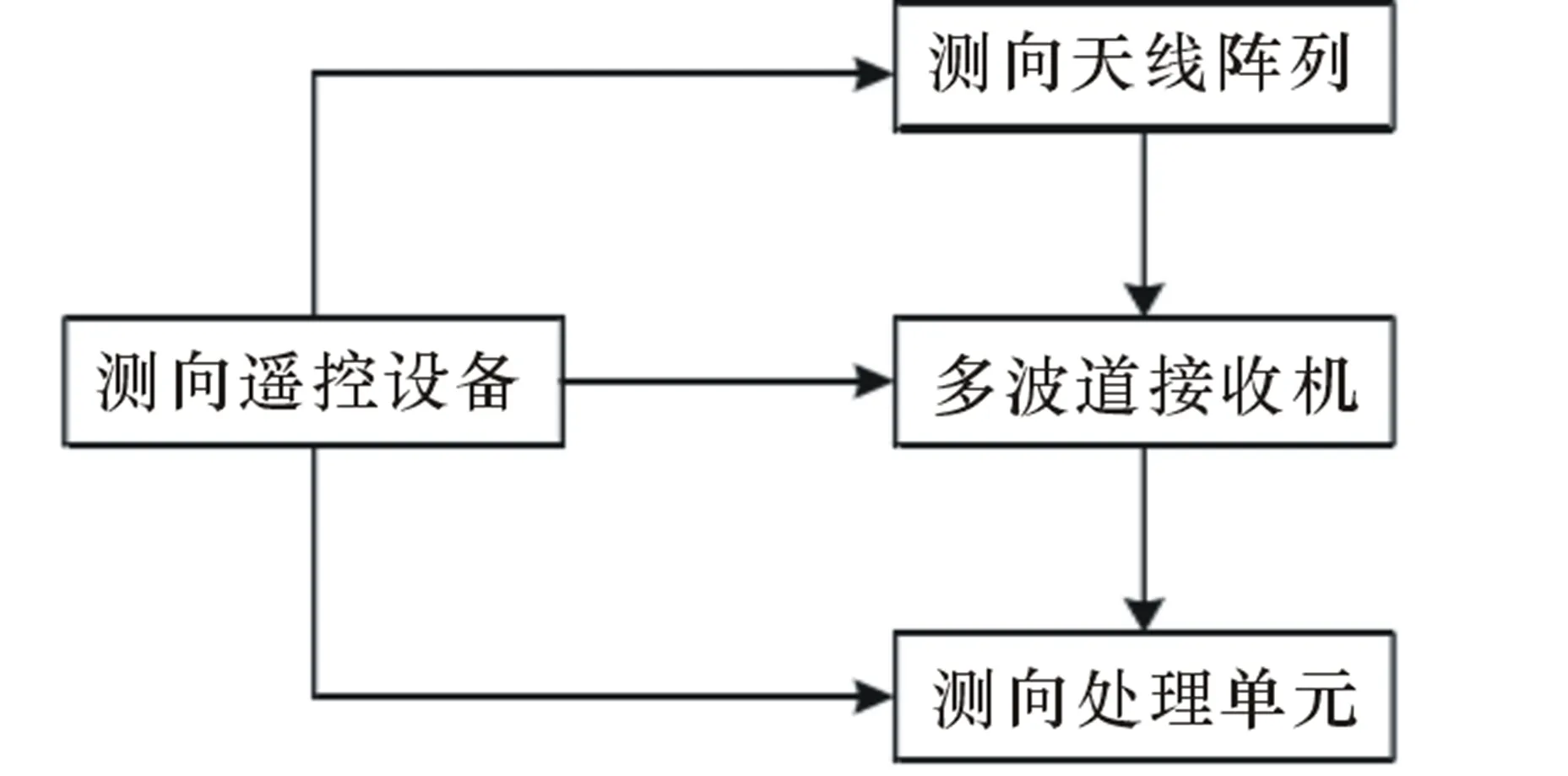
圖1 干涉儀測向系統(tǒng)模型
單基線指的是測向系統(tǒng)只由1組測向基礎(chǔ)構(gòu)成。如圖2 所示的最簡單的一維(只能測量入射俯仰角)單基線相位干涉儀,它只有1組且只有1條基線。D為陣元之間的間距,θ是信號入射的方位角,λ是載波的波長[4]。
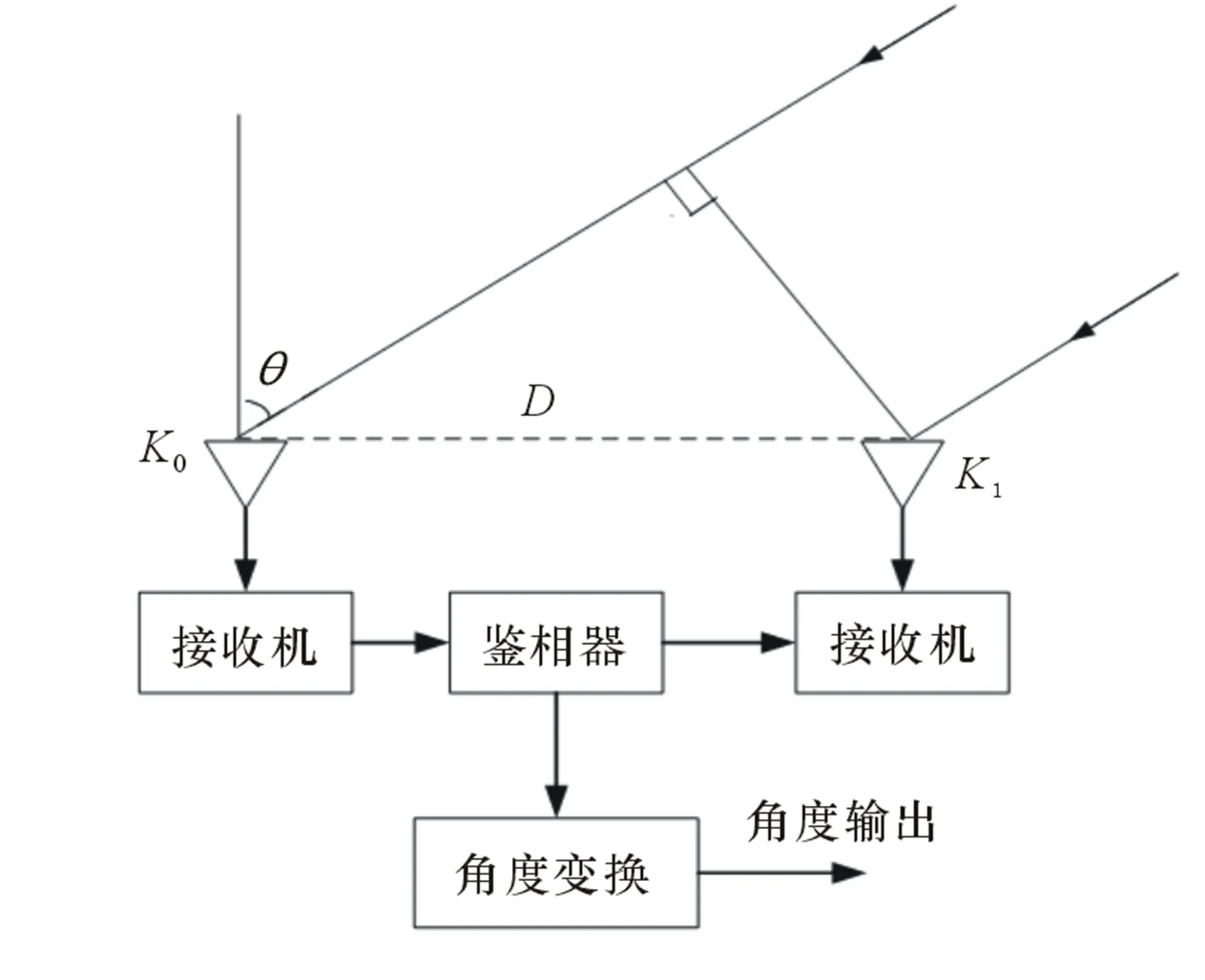
圖2 單基線一維相位干涉儀
則可得兩陣元接收到信號的空間相位差為:
(1)
由于鑒相器無模糊的相位檢測范圍為[-π,+π],可以得到單基線干涉儀測向的最大不模糊測角范圍為 [-θmax,θmax],根據(jù)式(1)可獲得最大相位差為π時的信號到達(dá)角θmax為:
(2)
可以發(fā)現(xiàn),當(dāng)一維相位干涉儀進(jìn)行測向時,如果同一信號的入射角分別來自θ方向和π-θ方向時,這2個方向得到的相位差一樣,而且都為2πDsinθ/λ,即存在一個模糊問題,因此考慮采用參差基線法和虛擬基線法解模糊。
2 參差基線法解模糊
當(dāng)入射信號頻率波段比較高時,它所對應(yīng)的波長就會很小。鑒于此就會產(chǎn)生幾個問題:一是為了解模糊,在長短基線法中往往需要最小基線長度小于半波長,而這在實際工程中很難實現(xiàn),所以該方法不適用;二是由于基線長度較短,天線陣元之間會產(chǎn)生耦合現(xiàn)象,影響相鄰天線的相位差,最后影響測量結(jié)果,所以基線長度也不能過短。因此,結(jié)合上述情況,在實際寬頻帶測向系統(tǒng)中,可以用參差基線法來解模糊,其原理主要是余數(shù)定理。
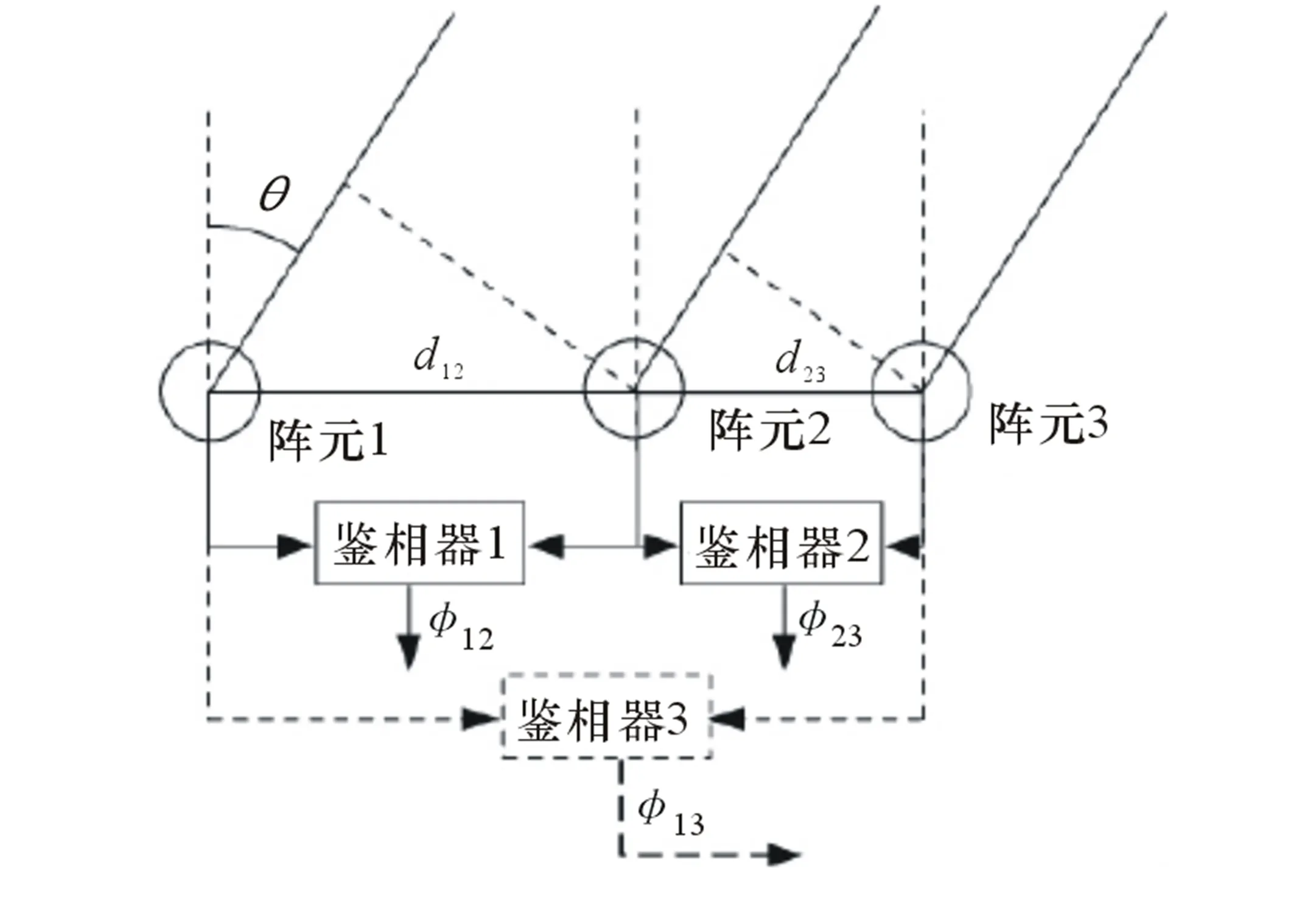
圖3 雙基線干涉儀原理圖
這里以雙基線為例,設(shè)d12=m1x,d23=m2x(其中,m1和m2必須互為質(zhì)數(shù),x<λ/2)。同樣,φ1,φ2分別為短基線和長基線對應(yīng)的有模糊相位差,來求取兩基線對應(yīng)的無模糊相位差φ1和φ2。根據(jù)干涉儀測向原理有:
(3)
(a) 當(dāng)θ>0時,把φ1,φ2化到[0,2π)的區(qū)間范圍,這時N1,N2≥0,將式(3)進(jìn)行變形得:
(4)
(b) 當(dāng)θ<0時,把φ1,φ2化到[-2π,0)的區(qū)間范圍,這時N1,N2≤0,將式(4)中的等式2邊同時乘以(-1)得:
(5)
(c) 采用最小二乘法確定入射角。
然而在實際工程中,采用上述方法仍然存在一個問題,即θ究竟是大于0還是小于0,這將決定我們是采用方法(a)還是方法(b)解模糊,若是方法的選擇會影響最后的結(jié)果,那么就需要判定來波方向。但是經(jīng)過大量的仿真實驗可以發(fā)現(xiàn):若是x的值小于半波長,方法(a)和方法(b)解模糊的結(jié)果只有一個有效結(jié)果,另一種方法無解,因為sinθ的值不在[-1,1]范圍內(nèi)。
余數(shù)定理解模糊隨著技術(shù)的進(jìn)步而越來越簡單,但是它也有一個缺點,如果因為噪聲影響了其中一個余數(shù)的測量,那么在解模糊的過程中會得到錯誤的結(jié)果。
針對長短基線的物理基線長度難實現(xiàn)的問題,余數(shù)定理法可以較好地解決這個問題。但是因為其本身限制,基線長度之間必須互質(zhì),就會使得天線陣列形式受限,比較單一,而且在實際測向環(huán)境中往往噪聲不可去除,因此余數(shù)的測量也是有偏差的,以至于最后入射角的測向結(jié)果存在誤差。
3 虛擬基線法解模糊
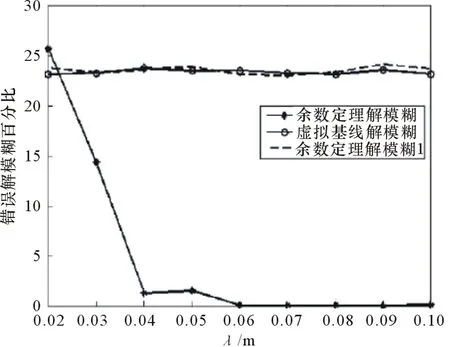
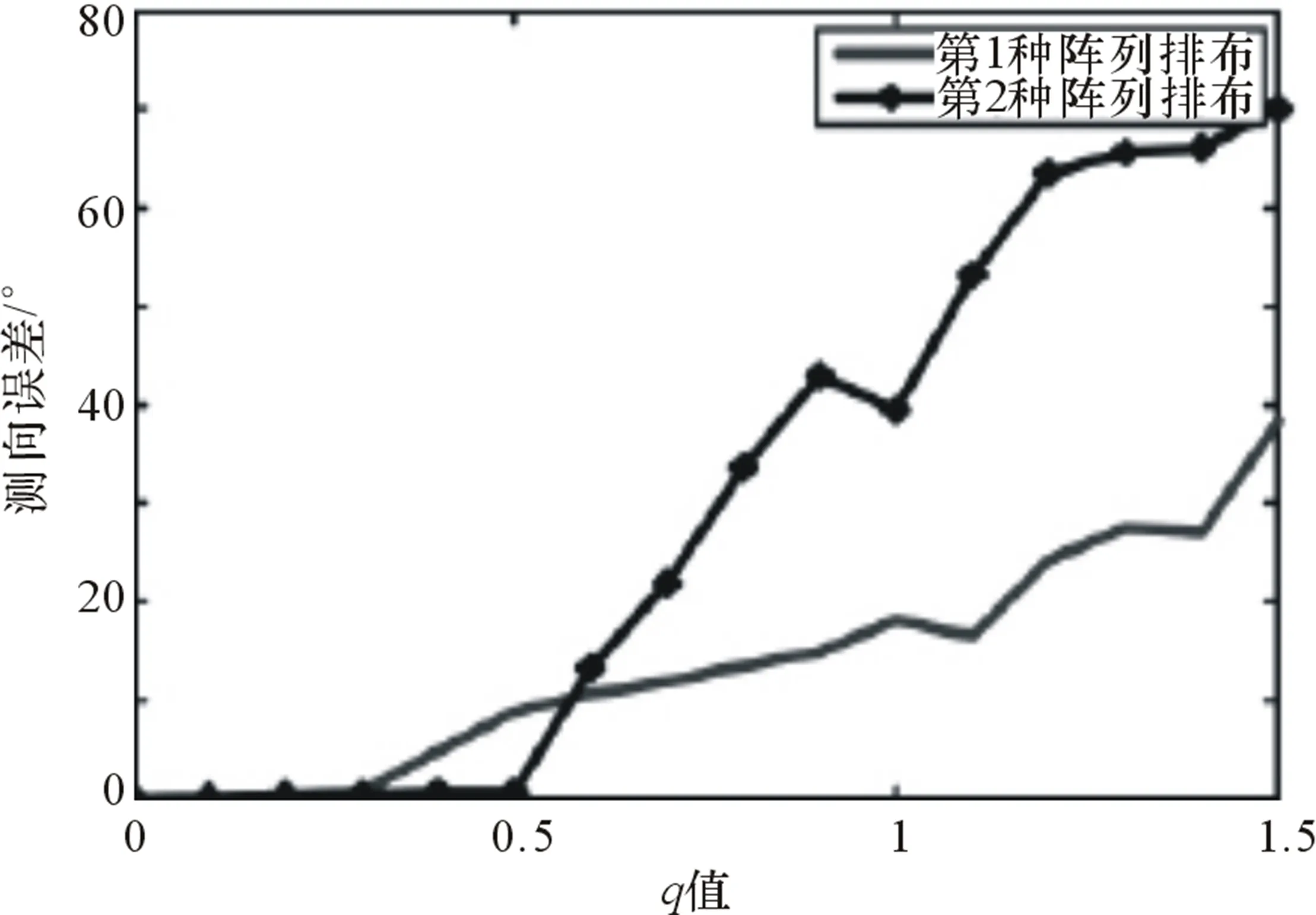
圖4為一維n基線相位干涉儀天線陣示意圖。設(shè)相鄰基線長度分別為d1,d2,…,dn,且可以測得任意兩天線i,j之間的相位差φij。構(gòu)造的m條虛擬基線就是通過這n+1個天線得來,設(shè)為d1′=di1-dj1,d2′=di2-dj2,…,dm′=dim-djm,其中i1,i2,…,im,j1,j2,…jm∈[1,2,…,n]。設(shè)這m條基線滿足一個關(guān)系:d1′ 圖4 一維n基線相位干涉儀示意圖 如圖4所示,入射角為θ,那么兩天線對應(yīng)信號之間的相位差為: (6) 式中:φi為兩天線之間的相位差,且φi∈[-π,π];Ni為整數(shù);λ為入射信號的波長[6]。 因為入射信號頻率已知,那么結(jié)合式(6)就可以測得θ: (7) 因為干涉儀單基線測向存在的模糊問題,Ni的值無法確定。長短基線法因為其缺點也不適用,因此這里通過構(gòu)造虛擬基線法解模糊。式(6)代入不同的基線及結(jié)果φij,并相減,得到: (8) 式中:Nk′=Nik-Njk;φk′=φik-φjk;dk′=dik-djk,ik,jk∈[1,2,…,n]。 由圖4,將基線長度表示為D1,D2,…,Dm+n,Di=di′,i=1,2,…,m為虛擬基線,Dm+j=dj,j=1,2,…,n,為實際基線,則有D1 (9) 式中:k=2,3,…,m+n。 其實該方法跟長短基線法還是有一些相同之處的,都是通過短基線來求解長基線的模糊,不同之處在于該方法通過構(gòu)造虛擬基線法解決了物理天線長度過短無法實現(xiàn)的問題。 (10) 只要選取的基線長度符合解模糊時構(gòu)造虛擬基線的條件,該方法可以很好地解決模糊問題。然而在實際工程測向中,因為很多誤差因素會影響測向精度,因此在解模糊過程中往往采用逐級解模糊的方法,而不是直接用虛擬基線解模糊,那樣產(chǎn)生的誤差會比較大。而且,這種方法一般需要較多的天線陣元,對設(shè)備要求比較高,成本相對較高。 以雙基線干涉儀測向系統(tǒng)為例,比較參差基線法和虛擬基線法的解模糊正確百分比:L=d1+d2=d12+d23=0.47 m,θ=-25°。 (a) 基于余數(shù)定理解模糊時,d12=0.36 m,d23=0.11 m; (b) 基于虛擬基線解模糊時,d1=0.24 m,d2=0.23 m。 當(dāng)2種方法信噪比一樣時,2種解模糊方法錯誤解模糊百分比(錯誤解模糊次數(shù)與總仿真次數(shù)之比,并用百分比表示)與信號波長間的關(guān)系曲線(4 000次獨立仿真計算的統(tǒng)計結(jié)果)如圖5所示。 圖5 解模糊能力與信號波長之間的關(guān)系 通過虛擬基線解模糊時,也存在基線長度滿足互質(zhì)的情況,因此也對此種情況參與了比較,所以圖5也給出了在滿足(b)中基線條件時,采用余數(shù)定理解模糊的結(jié)果,記為余數(shù)定理解模糊1。 通過圖5可以發(fā)現(xiàn): (1) 當(dāng)基線關(guān)系滿足(b)中的條件時,虛擬基線法和余數(shù)定理法的解模糊能力基本一致,且不隨著入射信號波長的變化而變化; (2) 當(dāng)滿足(a)中條件時,隨著信號波長的增大,余數(shù)定理法的解模糊能力也會增強。 虛擬基線測向系統(tǒng)由3個天線組成,構(gòu)成雙基線測向系統(tǒng)。信號源頻率為18 GHz,入射角為10°,信噪比為10 dB時,虛擬短基線測向誤差的均方根值為σθ=6.9°。在不同信噪比條件下,進(jìn)行了1 000次Monte-Carlo仿真實驗,如圖6所示。從圖6可以看出,測向精度隨著信噪比的增大而提高。 圖6 測向誤差與信噪比關(guān)系 圖7 測向誤差與信噪比關(guān)系圖 通過仿真可以發(fā)現(xiàn),在相同情況下,虛擬基線法的解模糊能力是遜于參差基線法的,在條件允許的情況下,選擇參差基線法解模糊相對來說更好一些。 另外,當(dāng)給定虛擬基線配置時,其解模糊能力是不會隨著信號波長的增加而增強的。 本文針對相位模糊問題,提出參差基線法、虛擬基線法這2種工程上比較常用的解模糊方法,并分析其各自優(yōu)缺點,通過仿真探討影響測向精度的因素。同時通過比較這2種方法的解模糊能力,得出一定情況下,參差基線法的解模糊能力要優(yōu)于虛擬基線法的結(jié)論,也給干涉儀測向系統(tǒng)解模糊方法的選擇提供了依據(jù)。 [1] 毛虎,楊建波,劉鵬.干涉儀測向技術(shù)現(xiàn)狀與發(fā)展研究[J].電子信息對抗技術(shù),2010(6):1-6. [2] 羅賢欣,劉光斌,王忠.干涉儀測向技術(shù)研究[J].艦船電子工程,2012(8):74-76. [3] 任鵬,李建軍,周彬,王建水.多基線干涉儀解模糊算法[J].電子信息對抗技術(shù),2015(3):6-8. [4] 馮嘯羽.干涉儀測向的校準(zhǔn)技術(shù)研究[D].西安:西安電子科技大學(xué),2012. [5] 司偉建.一種新的解模糊方法研究[J].制導(dǎo)與引信,2007(1):44-47. [6] 梁雙港.基于相位干涉儀測向算法的定位技術(shù)研究[D].西安:西北工業(yè)大學(xué),2006. Research into Interferometer Direction-finding Technology ZHAO Xiao-hua,LIANG Guang-zhen (The 723 Institute of CSIC,Yangzhou 225001,China) Interferometer direction-finding has the characteristics such as high direction-finding accuracy,high sensitivity,wide observation frequency band and so on,thus it is used widely in the electronic countermeasure,radar and other fields,but the weakness of phase interferometer is the linear range of the angle measurement is small.When the angle is bigger than the non-ambiguity view angle,the phase ambiguity may generate easily.Aiming at the problem of phase ambiguity,this paper puts forward two solving ambiguity methods of stagger baseline and virtual baseline,and compares the solving ambiguity capabilities through simulation experiments. interferometer direction-finding;solving ambiguity;stagger baseline method;virtual baseline method 2016-01-04 TN971.1 A CN32-1413(2016)03-0007-04 10.16426/j.cnki.jcdzdk.2016.03.002

4 對比解模糊能力
5 仿真實驗

6 結(jié)束語
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18考試與評價·高一版(2020年6期)2020-11-02 02:45:24兒童故事畫報(2019年5期)2019-05-26 14:26:14中國生殖健康(2019年3期)2019-02-01 06:12:26Coco薇(2016年2期)2016-03-22 02:42:52鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00Coco薇(2015年1期)2015-08-13 02:47:34小雪花·成長指南(2015年7期)2015-08-11 15:03:12小雪花·成長指南(2015年4期)2015-05-19 14:47:56
