一種PRI變化的雷達信號無源定位方法
2016-12-13 05:15:29陳曉威李彥志張國毅
艦船電子對抗 2016年3期
陳曉威,李彥志,張國毅
(空軍航空大學,長春 130022)
?
一種PRI變化的雷達信號無源定位方法
陳曉威,李彥志,張國毅
(空軍航空大學,長春 130022)
目前脈沖重復間隔(PRI)恒定的雷達信號已經(jīng)越來越少,取而代之的是PRI變化的雷達信號。傳統(tǒng)的相位差變化率定位法均假設PRI恒定,沒有考慮因PRI變化引起的相位差變化率測量誤差和定位誤差。提出了一種利用插值法重新構造相位差數(shù)據(jù)的方法,提取了相位差變化率并進行了定位解算。仿真結果表明采用該相位差數(shù)據(jù)重構方法能夠實現(xiàn)快速高精度的無源定位。
無源定位;插值;相位差重構;相位差變化率
0 引 言
相位差變化率定位技術是一種很有應用前景的快速高精度無源定位技術,是戰(zhàn)術電子偵察中不可或缺的一個重要環(huán)節(jié),對于獲取敵方雷達部署情況、戰(zhàn)場態(tài)勢,確保雷達情報的完整性具有無法替代的作用。
傳統(tǒng)的相位差變化率定位法大都假設以固定的觀測間隔偵收信號。而目前脈沖重復間隔(PRI)恒定的雷達信號已經(jīng)越來越少。當輻射源信號的PRI變化時,信號的觀測間隔也隨之變化,會導致傳統(tǒng)的提取相位差變化率的方法失效。文獻[1]采用最小二乘線性擬合提取PRI變化信號的相位差變化率,并用于相位差變化率定位法計算中。但是相位差是關于方位角的正弦函數(shù),是非線性變化的,采用最小二乘線性擬合構造的相位差數(shù)據(jù)是線性變化的,破壞了其非線性特性,相當于人為地引入了固定偏差,使得擬合得到的斜率(相位差變化率)是恒定值。在相位差測量誤差較大(σ>10°)時,擬合得到的恒定相位差變化率數(shù)值相對于其真實值可能出現(xiàn)發(fā)散的情況,導致了對相位差變化率的估計精度不穩(wěn)定。因此這種針對PRI變化雷達信號輻射源的相位差變化率定位法魯棒性差。本文提出利用插值法對非等觀測間隔的相位差測量數(shù)據(jù)進行重構,獲得等觀測間隔的測量數(shù)據(jù),再利用Kalman濾波法估計出相位差變化率進行定位解算。本算法計算量小,簡單可行,能夠滿足快速高精度無源定位的要求。
1 建立二維相位差變化率定位模型
文中假設相位差數(shù)據(jù)已經(jīng)過解模糊處理,所以利用一維單基線相位干涉儀模型測量目標輻射源到達干涉儀的相位差及其變化率參數(shù),通過定位算法求解觀測器與目標之間的徑向距離,實現(xiàn)即時定位。一維單基線干涉儀的原理如圖1所示[2]。
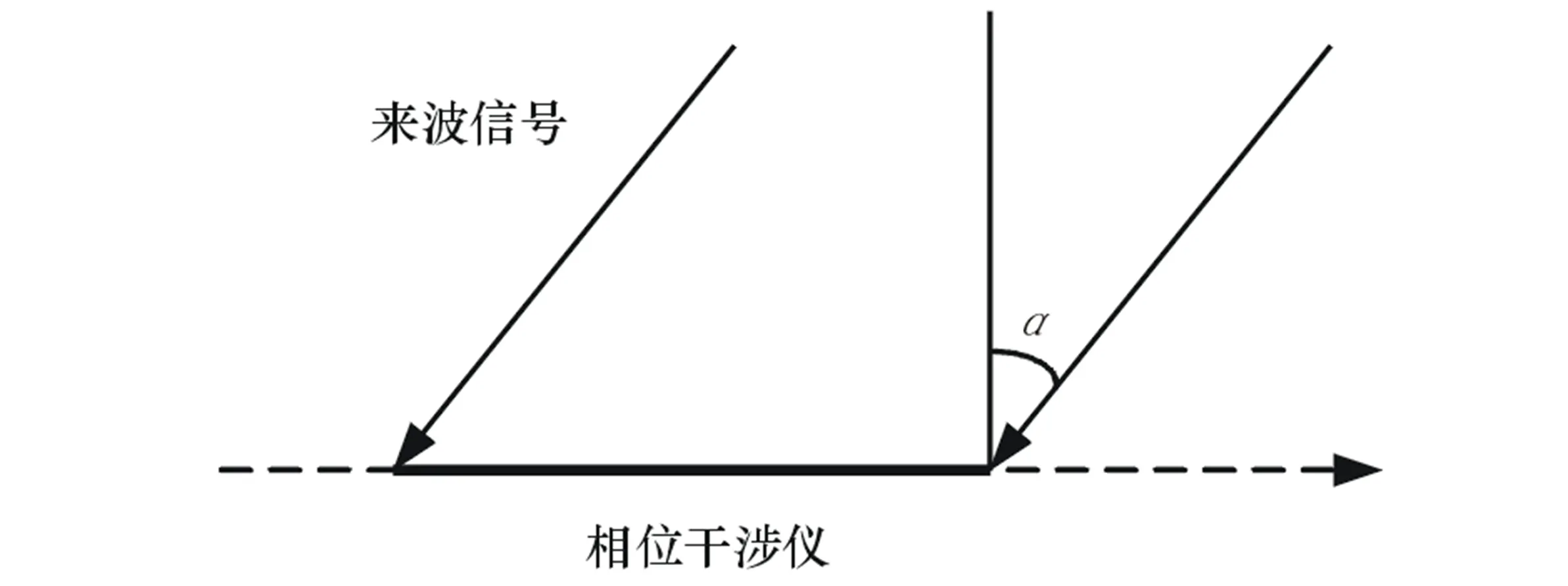
圖1 干涉儀基線方向與信號入射角關系示意圖
圖1中,α表示以干涉儀基線的法線方向為基準測得的信號入射角。
以地面某一固定點作為坐標原點O,建立二維平面直角坐標系OXYZ,如圖2所示[3]。
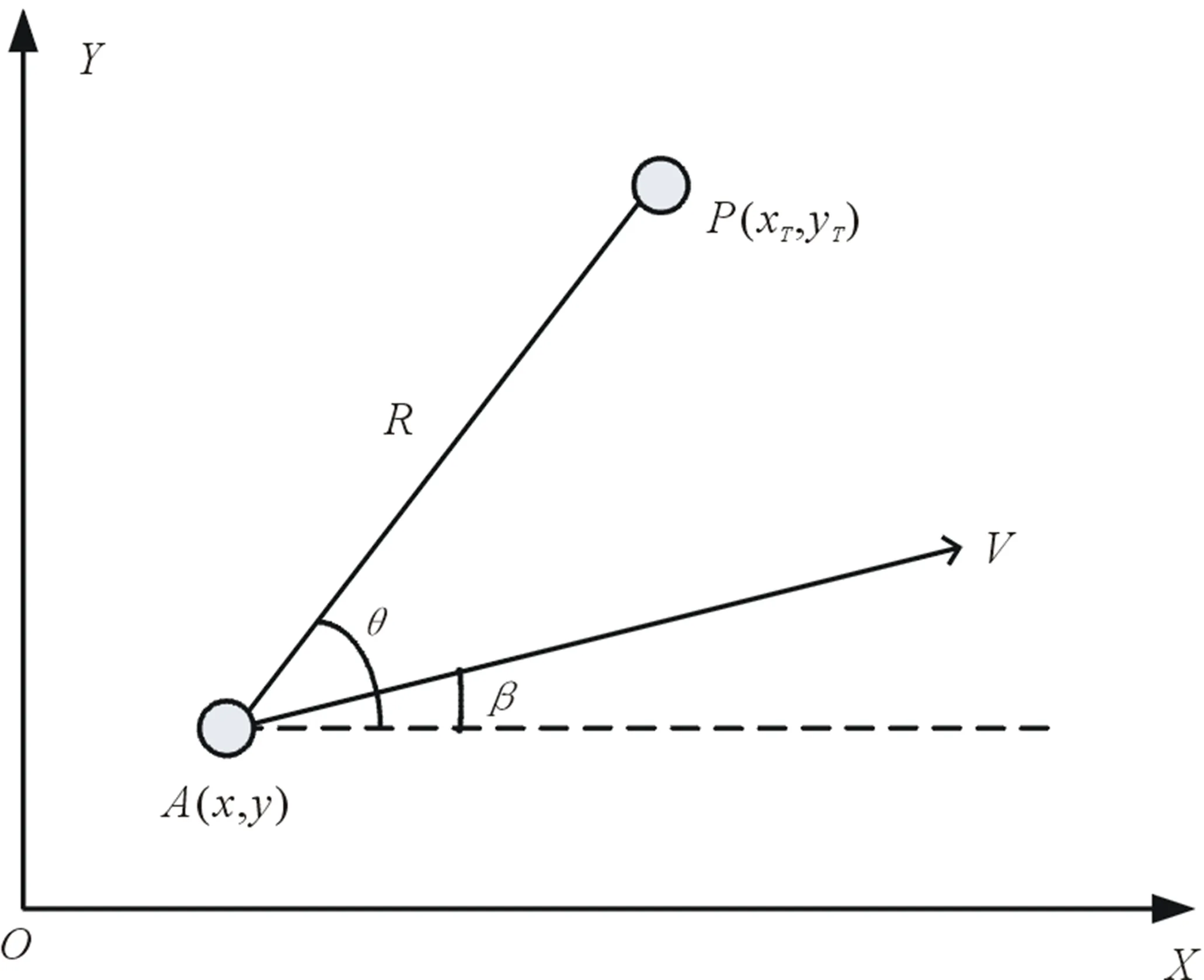
圖2 載機與目標輻射源相對位置圖
設OX軸的正向為正東方向,OY軸的正向為正北方向。在OXYZ坐標系下的地面未知輻射源所處位置為P(xT,yT),機載觀測器的坐標為A(x,y),并以某一航向角以速度V作勻速等高直線飛行,與目標輻射源之間存在相對非徑向運動,并且不考慮機身抖動引起的誤差。觀測器與未知輻射源之間的徑向距離為R。設OX軸正向為參考方向,β代表載機運動方向與參考方向間的夾角,即航向角。θ代表載機與未知輻射源間的徑向方向與參考方向的夾角,即輻射源的方位角。由文獻[3]可得測距公式為:
(1)
式中:fT為輻射源的信號載頻;α為信號的入射角;d為干涉儀基線長度;φ′為相位差變化率;c為光速。
推導出目標輻射源的位置公式為:
(2)
2 相位差及其變化率的變化規(guī)律
假設來波信號的PRI為0.001 s,理想情況下,來波信號的觀測間隔等于信號的PRI,故觀測間隔T=0.001 s。信號的載頻fT=3 GHz,測頻誤差服從高斯白噪聲分布且σfT=3 MHz,航向角β=0°,觀測器的運動速度V=(300,0) m/s,瞬時速度擾動噪聲σV=0.1 m/s,固定目標的位置為(107.15,399.88) km,觀測器的運動起點為(0,0)km,觀測器自身定位誤差均方差為σp=10 m,相位差測量誤差為高斯白噪聲,設解模糊后相位差測量均方誤差取σφ=0.261 8 rad,仿真時間5 s。短時間內的相位差數(shù)據(jù)仿真如圖3所示。
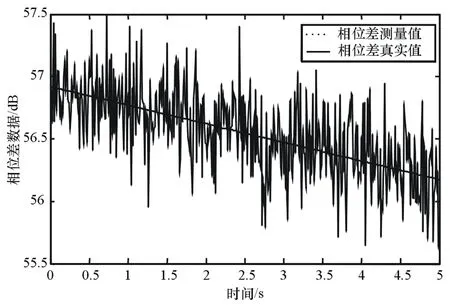
圖3 相位差數(shù)據(jù)變化規(guī)律
實際偵察中,載機在較短的時間內保持勻速直線等高飛行是可能的,并且相位差真實值隨時間呈近似線性變化。因此,在相位差變化率測量精度要求不高的前提下,可以近似將其認為是一個恒定的數(shù)值[4]。
3 基于插值的PRI變化信號定位法
3.1 基于分段插值的相位差重構

i=1,…,n,N∈Z+
(3)

3.2 典型的插值方法
典型的一元插值法包括Lagrange插值、Newton插值、分段線性插值、三次樣條插值、Hermite插值[5]。其中采用Hermite插值法時由于需要知道被插值函數(shù)的一階導數(shù),而相位差的一階導數(shù)即相位差變化率,為需要求出的測量值,因此Hermite插值法不適用于本文建立的模型。本文選取Lagrange插值、Newton插值、分段線性插值、三次樣條插值,比較這4種插值函數(shù)處理PRI變化信號相位差數(shù)據(jù)的能力。
3.3 算法流程描述
對PRI變化情況下的相位差數(shù)據(jù)處理以及定位解算的流程如下:
(1) 用小波降噪算法對解模糊后的相位差測量數(shù)據(jù)進行去噪處理,便于后續(xù)插值處理;
(2) 對1組PRI數(shù)值求和,除以選取的正整數(shù)N,從而得到新的PRI值,并構造出1組新的等間隔的脈沖到達時間;
(3) 利用插值法求出等間隔時刻對應的相位差數(shù)據(jù);
(4) 將重新構造的相位差數(shù)據(jù)用Kalman濾波法提取相位差變化率,并進行定位解算。
4 仿真結果和分析
4.1 提取相位差變化率的仿真分析
假設相位差的測量誤差σφ為0.174 5 rad,以PRI參差信號、PRI正弦調制信號為例,利用基于分段插值的相位差數(shù)據(jù)重構法估計出這2種信號的相位差變化率,插值函數(shù)選取為Lagrange插值、分段線性插值、三次樣條插值、Newton插值,仿真條件同3.1節(jié)所述,并且對每個插值函數(shù)作1 000次Monte Carlo循環(huán),取相位差變化率測量值的平均值作為仿真結果,仿真時間20 s。
仿真一:PRI參差信號。
設PRI參差信號為三級參差,T=0.01 s,ΔT=0.003 s,其3個PRI分別為T-ΔT、T、T+ΔT,仿真結果如圖4所示。

圖4 PRI參差信號的相位差變化率測量結果
仿真二:PRI正弦調制信號,其PRI均值為0.01 s,調制幅度為0.3,仿真結果如圖5所示。
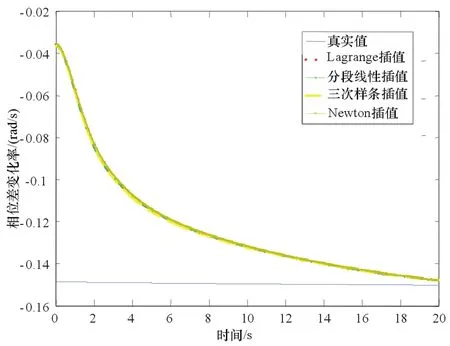
圖5 PRI正弦調制信號的相位差變化率估計結果
從圖4~圖5的仿真結果可以看出,對于PRI參差信號、PRI正弦調制信號,相位差變化率的測量值經(jīng)過一段時間的脈沖積累后,均能逐步逼近真實值,并且這4種插值函數(shù)都能夠滿足相位差數(shù)據(jù)的特點,可以認為時間越長,相位差變化率的測量精度越高。對其他PRI調制樣式信號的大量仿真實驗發(fā)現(xiàn)也能得到上述結論,說明了基于分段插值的相位差重構在理論上是可以用于處理PRI變化信號的。
4.2 定位結果的仿真分析
從4.1節(jié)的仿真分析可知:基于分段插值的相位差變化率估計法比最小二乘線性擬合法在測量精度上更具有穩(wěn)定性。因此,下面分別在PRI參差信號、PRI正弦調制信號的條件下,對該提取方法在定位應用中的有效性進行仿真分析和驗證,相位差測量誤差分別取0.174 5 rad、0.261 8 rad,對應的仿真時間分別為20 s、25 s,其余參數(shù)設置和仿真條件同前所述。1 000次Monte Carlo運算結果如圖6~9所示。
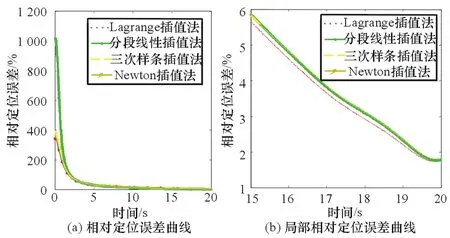
圖6 σφ=0.174 5 rad、仿真時間為20 s的相對定位誤差

圖7 σφ=0.261 8 rad、仿真時間為20 s的相對定位誤差

圖8 σφ=0.174 5 rad、仿真時間為25 s的相對定位誤差
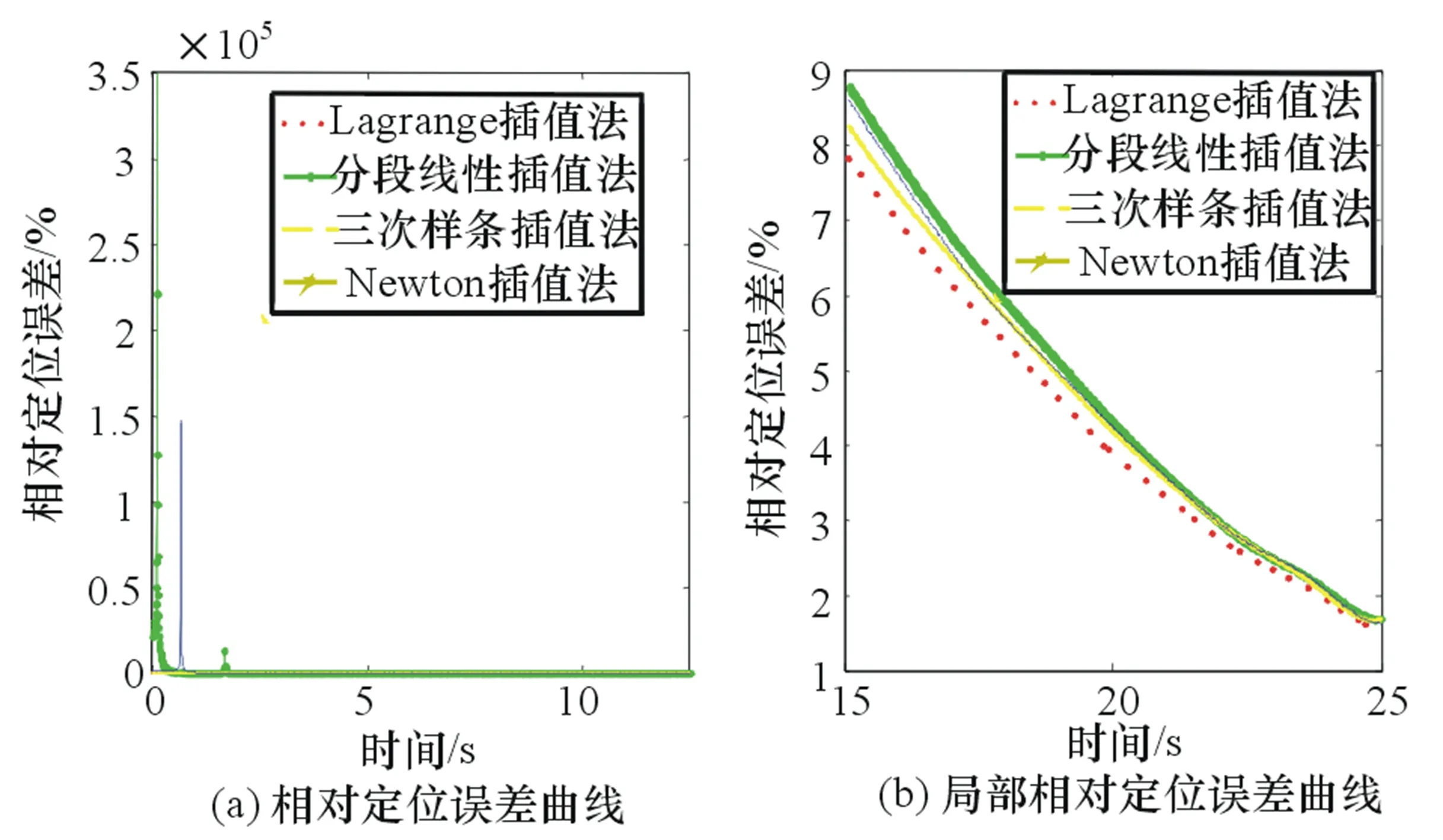
圖9 σφ=0.261 8 rad、仿真時間為25 s的相對定位誤差
通過圖6~圖9的相對定位誤差仿真結果發(fā)現(xiàn),本章提出的PRI變化信號定位方法在定位收斂速度上雖然比基于最小二乘擬合的相位差變化率定位法慢,但是定位誤差收斂至5%以下所需時間仍然是可以接受的。而且該定位方法魯棒性強,沒有出現(xiàn)定位精度發(fā)散的現(xiàn)象,經(jīng)過一段時間的脈沖積累后能達到較高的定位精度。當σφ=0.174 5 rad時,在16 s左右能夠將相對定位誤差收斂至5%以下,在20 s時相對定位誤差收斂至1.7%左右,達到了高精度定位。當σφ=0.261 8 rad時,定位精度收斂速度減慢。在仿真初期,定位誤差相當大;但是隨著脈沖的積累,定位誤差迅速減小,在25 s時分別能達到1.6%和3%的相對定位誤差。隨著定位時間的延長,定位精度還能提高。
5 結束語
本文提出了基于分段插值的相位差數(shù)據(jù)重構方法,再利用Kalman濾波法對重構的相位差數(shù)據(jù)估計出相位差變化率測量值。最后,通過仿真驗證了本文提出的相位差變化率提取方法估計精度高,適用于無源定位,且不受插值函數(shù)類型的影響。該算法簡單有效,計算量小,具有較強的工程應用價值。
[1] 張國毅,宋德亮,陳楓.PRI變化雷達信號相位差變化率定位法研究[J].艦船電子對抗,2010,33(3):35- 38.
[2] 張國毅,宋德亮,王長宇.相位差變化率定位法中缺失值精確填補研究[J].吉林大學學報(信息科學版),2010,28(1):20-26.
[3] 李炳榮,曲長文,王欣欣.機載快速無源定位原理及誤差分析[J].彈箭與制導學報,2005,25(4):291-293.
[4] 黃登才,丁敏.測相位差變化率無源定位技術評述[J].現(xiàn)代雷達,2007(8):32-34.
[5] 胡祖熾,林源渠.數(shù)值分析[M].北京:高等教育出版社,1986.
A Passive Location Method of The Radar Signal with Variational PRI
CHEN Xiao-wei,LI Yan-zhi,ZHANG Guo-yi
(Aviation University of Air Force,Changchun 130022,China)
Currently,radar signal with constant pulse repetition interval (PRI) is less and less,instead of this is radar signal with variational PRI.Traditional location method of phase difference change rate almost supposes that PRI is constant,hasn't considered the measuring error of phase difference rate and position error due to the change of PRI.This paper puts forward a kind of method to reconstruct phase difference data by means of interpolation method,abstracts the phase difference rate and performs location calculation.The simulation results show that the method to reconstruct phase difference data can quickly achieve passive location with high accuracy.
passive location;interpolation;reconstruction of phase difference;phase difference rate
2015-06-19
TN971.1
A
CN32-1413(2016)03-0011-04
10.16426/j.cnki.jcdzdk.2016.03.003
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
