一種改進(jìn)的干涉儀測(cè)向基線(xiàn)設(shè)計(jì)方法
2016-12-13 08:41:14韋敏峰田德民
艦船電子對(duì)抗 2016年5期
關(guān)鍵詞:方法
李 超,韋敏峰,李 迪,田德民
(中國(guó)船舶重工集團(tuán)公司第723研究所,揚(yáng)州 225001)
?
一種改進(jìn)的干涉儀測(cè)向基線(xiàn)設(shè)計(jì)方法
李 超,韋敏峰,李 迪,田德民
(中國(guó)船舶重工集團(tuán)公司第723研究所,揚(yáng)州 225001)
在原有干涉儀測(cè)向基線(xiàn)逐級(jí)解模糊規(guī)則的基礎(chǔ)上,在工作頻率、無(wú)模糊視角范圍及相位差誤差等條件下,為達(dá)到利用較少的天線(xiàn)陣元數(shù)解最長(zhǎng)基線(xiàn)模糊的目的,提出了一種改進(jìn)的干涉儀測(cè)向基線(xiàn)配置方法,并結(jié)合設(shè)計(jì)實(shí)例與已有基線(xiàn)配置方法進(jìn)行比較,驗(yàn)證了本文的基線(xiàn)配置方法能達(dá)到更高的測(cè)向精度。
干涉儀;測(cè)向;虛擬基線(xiàn);解模糊
0 引 言
由于精度高、速度快的優(yōu)點(diǎn),干涉儀測(cè)向在電子戰(zhàn)中具有廣泛應(yīng)用。干涉儀測(cè)向原理:以不同到達(dá)角入射的無(wú)線(xiàn)電信號(hào)在測(cè)向基線(xiàn)上會(huì)形成不同的相位差,因此不同的相位差代表不同的到達(dá)角[1-2]。在實(shí)際測(cè)量中,由于鑒相器的測(cè)量范圍(-π,π ]限制,測(cè)量相位差跟實(shí)際相位差之間可能差了2π的整數(shù)倍,該現(xiàn)象稱(chēng)為相位模糊。短基線(xiàn)可以解決相位模糊問(wèn)題,但基線(xiàn)長(zhǎng)度的縮短會(huì)導(dǎo)致測(cè)向精度的降低。結(jié)合干涉儀解模糊原理[3-5],為解決最大無(wú)模糊視角范圍與測(cè)向精度對(duì)天線(xiàn)間距要求這對(duì)矛盾,人們提出了一些解模糊方法[6-8]:長(zhǎng)短基線(xiàn)法、參差基線(xiàn)法、虛擬基線(xiàn)法及立體基線(xiàn)法等。其中,長(zhǎng)短基線(xiàn)法利用長(zhǎng)基線(xiàn)保證測(cè)向精度,利用短基線(xiàn)解決測(cè)向模糊。
對(duì)于探測(cè)信號(hào)頻率范圍[fmin,fmax]、最大無(wú)模糊視角范圍θm、θmax、相位差誤差±Δφ、測(cè)向精度Δθ、陣元間最小間距P的一維多基線(xiàn)干涉儀測(cè)向系統(tǒng),根據(jù)fmin、fmax求得λmax、λmin,此時(shí)最長(zhǎng)基線(xiàn)長(zhǎng)度:
(1)
最短無(wú)模糊實(shí)基線(xiàn)長(zhǎng)度:

(2)
最短無(wú)模糊虛擬基線(xiàn)長(zhǎng)度:

(3)
短基線(xiàn)解長(zhǎng)基線(xiàn)模糊的比例系數(shù)大小有限制[9],具體情況如下:
實(shí)基線(xiàn)解實(shí)基線(xiàn)比例系數(shù):
(4)
實(shí)基線(xiàn)解虛基線(xiàn)比例系數(shù):
(5)
虛基線(xiàn)解實(shí)基線(xiàn)比例系數(shù):
(6)
虛基線(xiàn)解虛基線(xiàn)比例系數(shù):
(7)
在工程應(yīng)用中,由于指標(biāo)及器件尺寸等限制,需要改變天線(xiàn)陣元的排列,合理安排基線(xiàn)配置,獲得最優(yōu)的基線(xiàn)配置方法及更高的測(cè)向精度。實(shí)際應(yīng)用中,經(jīng)常由于器件尺寸限制,無(wú)法直接構(gòu)造出最短無(wú)模糊實(shí)基線(xiàn),此時(shí)需要構(gòu)造最短無(wú)模糊虛基線(xiàn)來(lái)完成短基線(xiàn)到長(zhǎng)基線(xiàn)的解模糊。為此,本文提出了一種改進(jìn)的基線(xiàn)配置方法。
1 改進(jìn)的基線(xiàn)配置方法


圖1 基線(xiàn)逐級(jí)解模糊規(guī)則示意圖
結(jié)合實(shí)際工程應(yīng)用條件,構(gòu)造基于最短無(wú)模糊虛基線(xiàn)的基線(xiàn)配置步驟。為方便說(shuō)明,步驟中的基線(xiàn)長(zhǎng)度均用基線(xiàn)長(zhǎng)與最短無(wú)模糊虛基線(xiàn)長(zhǎng)度d1的比值表示。設(shè)陣元數(shù)為x,令M=dmin/d1max,p=P/d1max,基線(xiàn)配置流程圖如圖2所示。
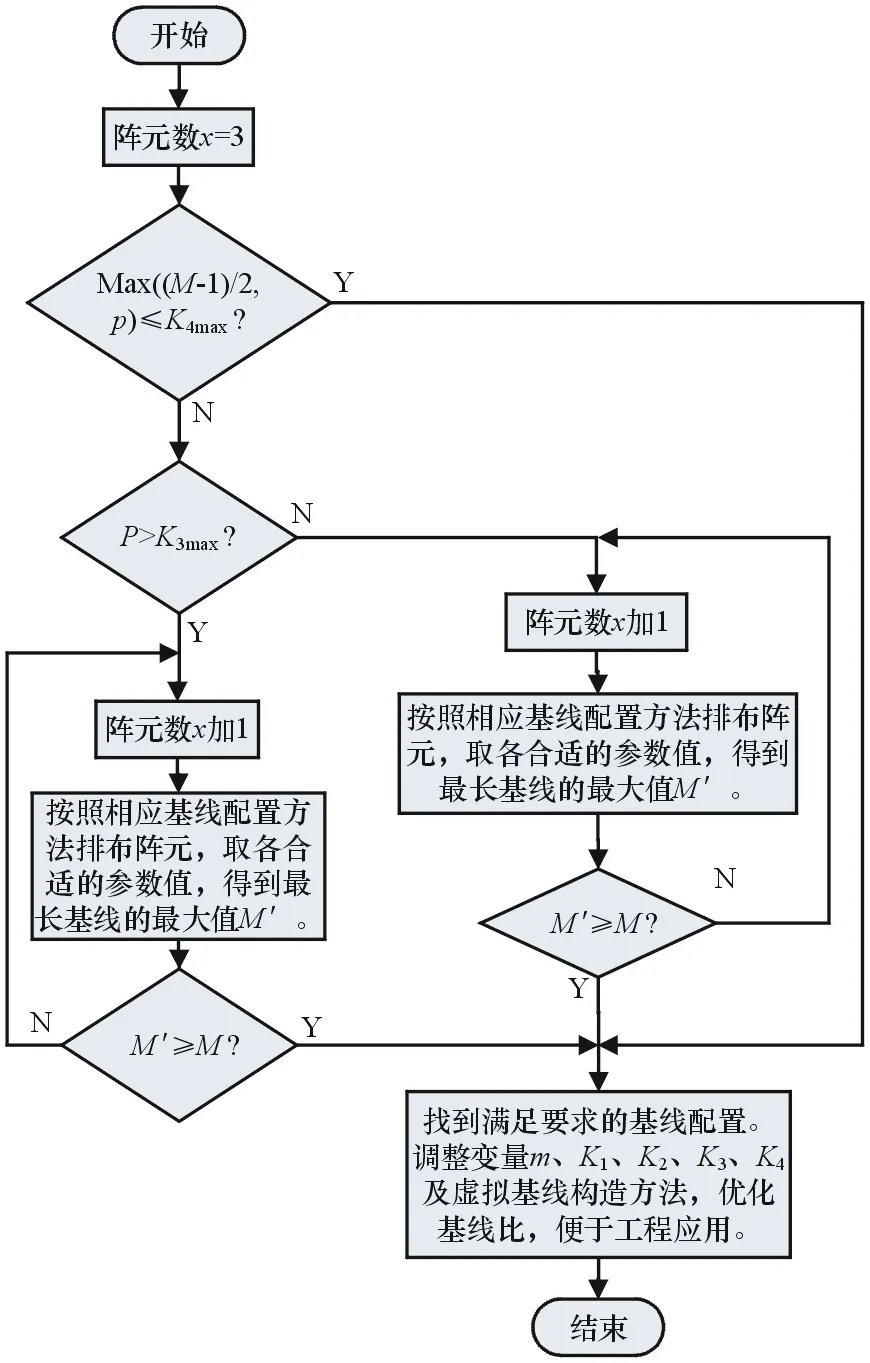
圖2 基線(xiàn)配置流程圖
(1) 判斷3個(gè)陣元是否可行
x=3,從3個(gè)陣元開(kāi)始。此時(shí)構(gòu)造出基線(xiàn)m與m+1。
判斷方法:
(8)
(2) 比較p與K3max的大小
若p>K3max,則轉(zhuǎn)(3);否則轉(zhuǎn)(4)。
(3) p>K3max的基線(xiàn)配置方式
陣元數(shù)加1,x ← x+1,在p>K3max時(shí),判斷當(dāng)前數(shù)量x個(gè)陣元能否構(gòu)造出滿(mǎn)足條件的基線(xiàn)配置。此時(shí),不能直接由最短虛基線(xiàn)解實(shí)基線(xiàn)模糊,需要不斷構(gòu)造出更長(zhǎng)的虛基線(xiàn)(如1,K4,K42,K43,…),逐級(jí)解模糊,最終解實(shí)基線(xiàn)m的模糊。令p≤K4aK3,解得:
(9)
取滿(mǎn)足a要求的最小整數(shù)值為N,令p′=K4NK3。此時(shí)利用N+3個(gè)陣元即可解得實(shí)基線(xiàn)m的模糊。m的變化范圍為[ p , p′ ]。可以采用如圖3所示基線(xiàn)增長(zhǎng)較慢的配置方式。

圖3 基線(xiàn)增長(zhǎng)較慢的基線(xiàn)配置方式
為了使基線(xiàn)長(zhǎng)度盡快增長(zhǎng),可選擇不同的虛擬基線(xiàn)構(gòu)造方式,更快達(dá)到最長(zhǎng)基線(xiàn)長(zhǎng)度M,此時(shí)可采用如圖4所示的基線(xiàn)配置方式。

圖4 基線(xiàn)增長(zhǎng)較快的基線(xiàn)配置方式
圖4中,A段基線(xiàn)構(gòu)造的目的是以最少的陣元數(shù)盡快地由虛基線(xiàn)逐級(jí)解實(shí)基線(xiàn)m模糊;B段基線(xiàn)構(gòu)造的目的是以最快的速度增長(zhǎng)總基線(xiàn)長(zhǎng)度,以達(dá)到測(cè)向精度要求。
考慮當(dāng)前的陣元數(shù)x限制,調(diào)整變量,利用圖4所述基線(xiàn)配置方法將各段基線(xiàn)長(zhǎng)度配置出來(lái)。
(a) 當(dāng)x≥N+3時(shí),即利用不大于x個(gè)陣元數(shù)便可完成A段由虛基線(xiàn)逐級(jí)解實(shí)基線(xiàn)m模糊的過(guò)程,后續(xù)按照?qǐng)D4中B段實(shí)基線(xiàn)解實(shí)基線(xiàn)模糊的構(gòu)造方法,即可構(gòu)造出符合要求的基線(xiàn)配置。

若M′≥M,則基線(xiàn)配置滿(mǎn)足要求。
若M′ (b) 當(dāng)x 此時(shí)x個(gè)陣元無(wú)法構(gòu)造出滿(mǎn)足要求的基線(xiàn)配置,轉(zhuǎn)(3)。 (4) p≤K3max的基線(xiàn)配置方式 陣元數(shù)加1,x ← x+1,在p≤K3max時(shí),判斷當(dāng)前數(shù)量x個(gè)陣元能否構(gòu)造出滿(mǎn)足條件的基線(xiàn)配置。此時(shí),可以直接構(gòu)造出實(shí)基線(xiàn)m,滿(mǎn)足由最短虛基線(xiàn)能直接解實(shí)基線(xiàn)m的模糊。m的變化范圍為[ p , K3max]。 為了使基線(xiàn)長(zhǎng)度盡快增長(zhǎng),更快達(dá)到最長(zhǎng)基線(xiàn)長(zhǎng)度M,采用如圖5基線(xiàn)配置方式: 圖5 基線(xiàn)配置方式 圖5中A段基線(xiàn)構(gòu)造的目的是實(shí)現(xiàn)最短虛基線(xiàn)直接解實(shí)基線(xiàn)m模糊;B段基線(xiàn)構(gòu)造的目的是以最快的速度增長(zhǎng)總基線(xiàn)長(zhǎng)度,以達(dá)到測(cè)向精度要求。 按照?qǐng)D5所述基線(xiàn)配置方式配置x個(gè)陣元,圖5中n=x-4,比較此時(shí)最長(zhǎng)基線(xiàn)(2m+1)(K1+1)x-3的最大值M′與M的大小。 當(dāng)m=K3max,K1=K1max時(shí),(2m+1)(K1+1)x-3取得其最大值M′=(2K3max+1)(K1max+1)x-3。 若M′≥M,則基線(xiàn)配置滿(mǎn)足要求。 此時(shí)基線(xiàn)比為K3max,K3max+1,(2K3max+1)K1max,(2K3max+1)(K1max+1)K1max,(2K3max+1)(K1max+1)2K1max,…,(2K3max+1)(K1max+1)x-4K1max,轉(zhuǎn)(5)。 若M′ (5) 調(diào)整基線(xiàn)長(zhǎng)度 考慮到工程適裝性,可在滿(mǎn)足基線(xiàn)逐級(jí)解模糊規(guī)則的前提下,利用變量m,K1,K2,K3,K4以及虛擬基線(xiàn)的構(gòu)造方式(如圖3與圖4虛擬基線(xiàn)構(gòu)造方式有區(qū)別)調(diào)整基線(xiàn)長(zhǎng)度,縮短最長(zhǎng)基線(xiàn)長(zhǎng)度,使最長(zhǎng)基線(xiàn)長(zhǎng)度盡量接近M。 為了驗(yàn)證上述基線(xiàn)配置方法的工程有效性,按如下要求設(shè)計(jì)應(yīng)用實(shí)例。 工作頻率為2~6GHz,最大無(wú)模糊測(cè)向視角范圍為±45°,θmax為90°,相位差測(cè)量誤差為±30°,測(cè)向精度為1.5°,陣元間最小間距為61mm,可得信號(hào)波長(zhǎng)范圍為50~150mm。 根據(jù)公式(1)~(7): d≥dmin=675.24mm,取d=688mm; d1≤d1max=16.67mm,取d1=16mm; K1≤K1max=5,K2≤K2max=4,K3≤K3max=2.5,K4≤K4max=2。 M=688/16=43;p≥61/16=3.812 5,取p=4。 (1) 判斷x=3個(gè)陣元能否滿(mǎn)足要求 (2) 判斷x=4個(gè)陣元能否滿(mǎn)足要求 因?yàn)?>2.5,即p>K3max,此時(shí),由式(9)得:a≥0.68,因此,N=1,p′=2×2.5=5。 此時(shí)x=N+3,按照p′,p′+1,2p′+1+ K4max構(gòu)造基線(xiàn),各基線(xiàn)比為5∶6∶13。 最長(zhǎng)基線(xiàn)長(zhǎng)度為M′=5+6+13=24<43,即M′ (3) 判斷x=5個(gè)陣元能否滿(mǎn)足要求 x>N+3,按照p′,p′+1,2p′+1+ K4max,(4p′+2+ K4max)K1max構(gòu)造基線(xiàn),各基線(xiàn)比為5∶6∶13∶120。 最長(zhǎng)基線(xiàn)長(zhǎng)度為M′=5+6+13+120=144>43,滿(mǎn)足M′>M,即5個(gè)陣元可以滿(mǎn)足要求。 (4) 調(diào)整基線(xiàn)長(zhǎng)度 以基線(xiàn)比為5∶6∶13∶120構(gòu)造,5+6+13+120=144,144已經(jīng)遠(yuǎn)大于最長(zhǎng)基線(xiàn)長(zhǎng)度要求(M=43)。為考慮工程適裝性,將最后一段基線(xiàn)長(zhǎng)120縮短至20,可滿(mǎn)足測(cè)向精度要求,即將基線(xiàn)比調(diào)整為5:6∶13∶20,此時(shí)亦可滿(mǎn)足基線(xiàn)配置要求。 (5) 驗(yàn)證基線(xiàn)逐級(jí)解模糊規(guī)則 根據(jù)5∶6∶13∶20構(gòu)造基線(xiàn),可以構(gòu)造出的實(shí)基線(xiàn)為{5,6,11,13,19,20,24,33,39,44},可以構(gòu)造出的虛基線(xiàn)為{1,2,4,5,6,7,8,9,11,13,14,15,18,19,20,22,24,25,26,27,28,31,33,34,38,39},如圖6所示。實(shí)基線(xiàn)與虛基線(xiàn)集合中若有相同長(zhǎng)度的基線(xiàn),選實(shí)基線(xiàn)誤差更小。 圖6 實(shí)基線(xiàn)與虛基線(xiàn)長(zhǎng) 根據(jù)基線(xiàn)逐級(jí)解模糊規(guī)則,由短到長(zhǎng)逐級(jí)解模糊,基線(xiàn)增長(zhǎng)的系數(shù)均在K1、K2、K3、K4范圍內(nèi),最后能夠完成最長(zhǎng)基線(xiàn)的解模糊。 (6) 對(duì)比文獻(xiàn)[9]的基線(xiàn)配置方法 根據(jù)文獻(xiàn)[9],利用5個(gè)陣元配置基線(xiàn)。先配置虛擬基線(xiàn)(長(zhǎng)度仍用與最短基線(xiàn)長(zhǎng)度比值表示):1,2,3,6,9。 第1級(jí)實(shí)基線(xiàn)為:9×2.5=22.5。 其他實(shí)基線(xiàn)為:22.5+1=23.5,22.5+3=25.5,22.5+9=31.5。 最長(zhǎng)基線(xiàn)長(zhǎng)度為:22.5+23.5+25.5+31.5=103。 因?yàn)?03<144,因此,在相同數(shù)量的陣元數(shù)條件下,本文的基線(xiàn)配置方法與文獻(xiàn)[9]比,具有更高的測(cè)向精度。 本文闡述了干涉儀測(cè)向中的基線(xiàn)逐級(jí)解模糊規(guī)則,為達(dá)到利用較少的天線(xiàn)陣元數(shù)解最長(zhǎng)基線(xiàn)模糊的目的,提出了一種改進(jìn)的干涉儀測(cè)向基線(xiàn)配置方法。結(jié)合設(shè)計(jì)實(shí)例,在工作頻率范圍、無(wú)模糊視角范圍及測(cè)向精度等條件下,驗(yàn)證了本基線(xiàn)配置方法的準(zhǔn)確性。與其他基線(xiàn)配置方法比較,本方法具有更高的測(cè)向精度。同時(shí),本方法考慮了陣元間間距最小值、相位差誤差及工程適裝性,具有一定的工程應(yīng)用價(jià)值。 [1] 肖秀麗.干涉儀測(cè)向原理[J].中國(guó)無(wú)線(xiàn)電,2006 (5):43-49. [2] 楊偉程.單站長(zhǎng)基線(xiàn)干涉儀測(cè)向定位技術(shù)研究[D].西安:西安電子科技大學(xué),2009. [3] 張文旭,司錫才,蔣伊琳.相位干涉儀測(cè)向系統(tǒng)相位誤差研究[J].系統(tǒng)工程與電子技術(shù),2006,28(11):1631- 1632. [4] 李興華,顧爾順.干涉儀解模糊技術(shù)研究[J].現(xiàn)代防御技術(shù),2008,36(3):92-96. [5] 蔣學(xué)金,高遐,沈揚(yáng).一種多基線(xiàn)相位干涉儀設(shè)計(jì)方法[J].電子信息對(duì)抗技術(shù),2008,23(4):39-45. [6] 李勇,趙國(guó)偉,李滔.一種機(jī)載單站相位干涉儀解模糊算法[J].傳感技術(shù)學(xué)報(bào),2006,19(6):2600-2602. [7] 司偉健,初萍.干涉儀測(cè)向解模糊方法[J].應(yīng)用科技,2007,34(9):54-57. [8] 羅賢欣,劉光斌,王忠.干涉儀測(cè)向技術(shù)研究[J].艦船電子工程,2012,32(8):74-76. [9] 李東虎.干涉儀測(cè)向系統(tǒng)中的基線(xiàn)配置技術(shù)[J].無(wú)線(xiàn)電工程,2014(4):17-19. An Improved Method of Interferometer DF Baseline Design LI Chao,WEI Min-feng,LI Di,TIAN De-min (The 723 Institute of CSIC,Yangzhou 225001,China) Based on the rule of gradually resolving ambiguity of original interferometer direction finding (DF) baseline,this paper puts forward an improved interferometer DF baseline deployment method for the aim of resolving the longest baseline ambiguity by using less antenna array elements under the conditions of operating frequency,range of no ambiguity view,phase difference error,etc.,and compares the method with existing baseline deployment method combining with design example,proves that the baseline deployment method provided in this paper can fetch better DF accuracy. interferometer;direction finding;simulative baseline;resolving ambiguity 2016-08-28 TN971 A CN32-1413(2016)05-0019-05 10.16426/j.cnki.jcdzdk.2016.05.004
2 設(shè)計(jì)實(shí)例


3 結(jié)束語(yǔ)
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04河北畫(huà)報(bào)(2021年2期)2021-05-25 02:07:46中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04兒童繪本(2020年5期)2020-04-07 17:46:30兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14Coco薇(2016年2期)2016-03-22 02:42:52山東青年(2016年1期)2016-02-28 14:25:23Coco薇(2015年1期)2015-08-13 02:47:34小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
