懸臂式3D打印機設計研究及在民航維修中的應用展望
2016-12-13 06:52:59邱基倫
裝備制造技術 2016年10期
邱基倫
(中國東方航空股份有限公司,上海200335)
懸臂式3D打印機設計研究及在民航維修中的應用展望
邱基倫
(中國東方航空股份有限公司,上海200335)
通過對兩類3D打印機運動模態和局限性分析,設計一款更適合民航維修的懸臂式3D打印機。懸臂式打印機具有工作高效、空間利用率高、無需依賴基床的特點。
3D打印;懸臂式;民航維修;運動模態
3D打印技術作為第三次工業革命的重要標志[1],已經在工業的各個領域展開了廣泛的研究和應用。在航空制造領域,波音公司運用3D打印技術制造各種復雜的飛機零件,如冷空氣導入電子設備的形狀復雜導管;空客在A380客艙里使用3D打印機打印行李架;GE計劃使用3D打印技術打印LEAP發動機組件[1]。在民航維修領域,東方航空首次使用3D打印技術打印飛機艙門手柄蓋板、飛機座位指示牌等客艙部件配裝B777-300ER型客機上,開啟了3D打印技術在中國民航維修運用的時代。本文通過對兩類3D打印機運動模態和局限性分析,設計一款更適合民航維修的懸臂式3D打印機。
1 3D打印技術在民航維修中的應用現狀分析
目前,因受現有3D打印機運動形態限制,3D打印技術在民航維修中的應用僅局限于非在翼維修,即先在地面把零件打印好,然后再安裝到飛機上。如要運用到在翼維修領域,現有的3D打印機運動形態需做進一步改進:基床的可選裝性,實現無基床打印,在目標物體上直接打印成品;提高空間利用率,以適應在翼維修空間有限的特點;提高打印效率,以減少飛機停場時間。
2 3D打印機運動類型分析
3D打印技術是通過連續的物理層疊加,逐層增加材料來生成三維實體的技術[2]。除了打印頭、耗材使用、成型方式不一樣,各種打印方法所基于的3D運動平臺都有類似之處,即通過打印頭和基床的相對三維運動,實現物理層的層層疊加。常見的運動類型有:
2.1三維直線運動型
此類3D打印運動平臺的特點是:基床一維直線往復運動(X軸);打印頭在每一物理層做一維直線往復運動(Y軸);打印頭的導軌在垂直方向上單向一維直線層級運動(Z軸),如圖1所示,例如桌面級3D打印機RepRap系列的Prusa Mendel、Prusa I3等。
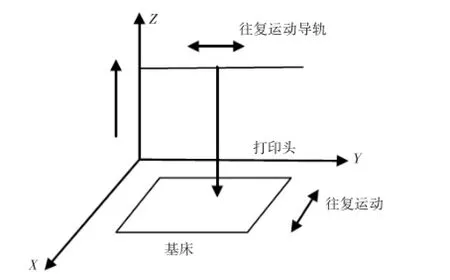
圖1 基床往復運動型
或者基床在垂直方向上單向一維直線層級運動(Z軸);打印頭沿導軌在橫向做一維直線往復運動(Y軸);打印頭的導軌沿縱向導軌在縱向做一維直線往復運動(X軸)(見圖2),如Jenny Printer系列等。
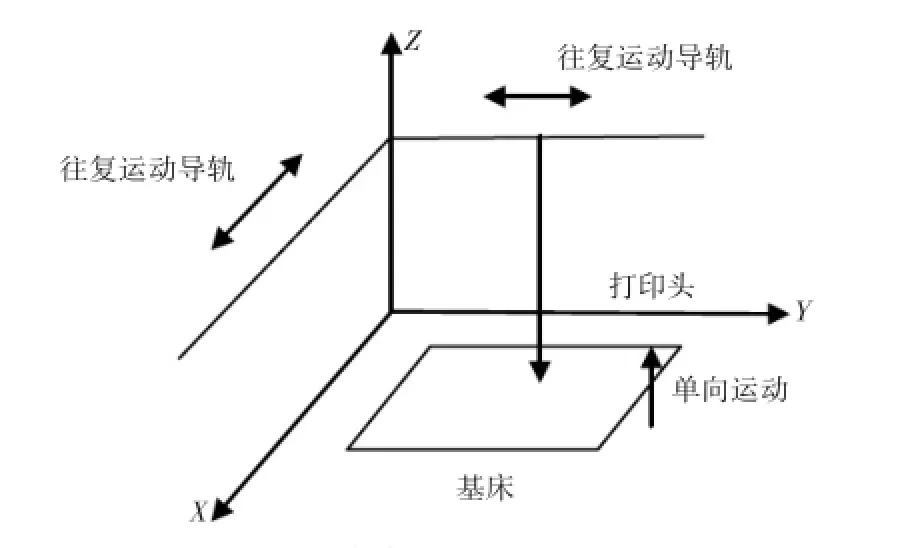
圖2 基床單向運動型
三維直線運動型打印機將電機的步進角度轉化為三軸上的直線位移,優點是結構簡單,三軸精度易于調節。但由于打印件安放在基床上,隨基床一起運動,因此基床的響應速度和運動速度對打印件穩定性和精度存在限制,過大的速度會導致失步或打印件脫離基床,尤其是基床一維直線往復運動型,運動和震動幅度更大。因各維度上的運動都是直線運動,所以運動函數可用以下方程描述:

其中:f為單位運動距離所需的脈沖數;ρ為步進電機步進角;μ為電機驅動細分;n為傳動比因子。
步進角ρ由電機型號確定;細分μ可在電機驅動板上調節;傳動比因子n由傳動機構的具體形態和尺寸參數確定,如同步輪、同步帶、絲桿、傳動齒輪等的尺寸參數。f越大,說明單位距離位移所需的脈沖數越多,打印速度就越慢;相反,f越小,打印速度越快。
由以上方程可知,打印精度受ρ、μ、n三個因素影響,而ρ和μ比較穩定,n精度易于調節,傳動機構誤差之間可以相互抵沖,所以整體打印精度較高。RepRap類打印空間利用率為50%;Jenny Printer打印空間利用率為100%.
2.2打印頭三維非線性運動型
此類3D打印運動平臺的特點是:基床不動,打印頭在三維空間上非線性運動,通過將非線性運動投影到X-Y平面和Z軸上,實現層級疊加(如圖3所示),例如Delta系列3D打印機。

圖3 打印頭三維非線性運動型
由于基床靜止不動,打印件也保持靜止,從而減少震動,提高打印件的穩定性,降低脫落風險,再加上打印頭非線性自由運動,可用更快的響應速度和移動速度驅動打印頭,實現更高的打印速度。以Delta結構的3D打印機為例,打印頭移動到直角坐標點A(x,y,z)時,A點和打印機滑塊的幾何關系可用以下方程組描述:
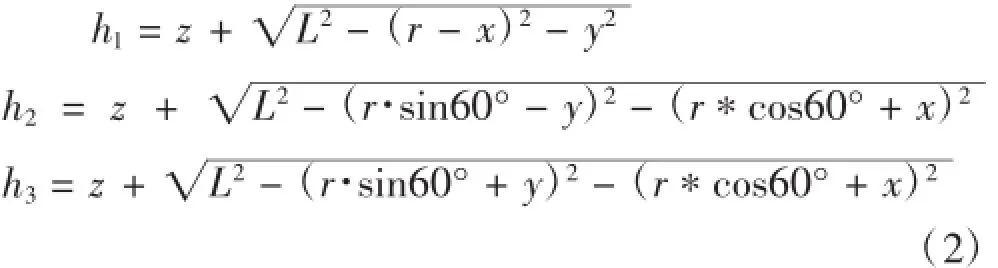
其中:h1為滑塊1#離基床的垂直高度;h2為滑塊2#離基床的垂直高度;h3為滑塊3#離基床的垂直高度;r為圓盤基床半徑,坐標原點在基床圓心;L為連桿長度。
由方程組可知,滑塊位置與打印頭位置之間是非線性函數關系,除了三維直線運動型的電機傳動誤差,還有連桿機構的非線性誤差,誤差來源較多,而且誤差之間無法抵沖,因此打印精度不易調節。打印機的可利用空間受到連桿限制,頂部的空間無法有效利用,無效體積為:

空間利用率為:

其中:H為機架立軸長度。
3 懸臂式3D打印機結構設計和原理分析
綜合考慮3D打印機的精度調節、響應和移動速度、空間利用率、有無基床打印等因素,設計一款懸臂式結構打印機(如圖4)。
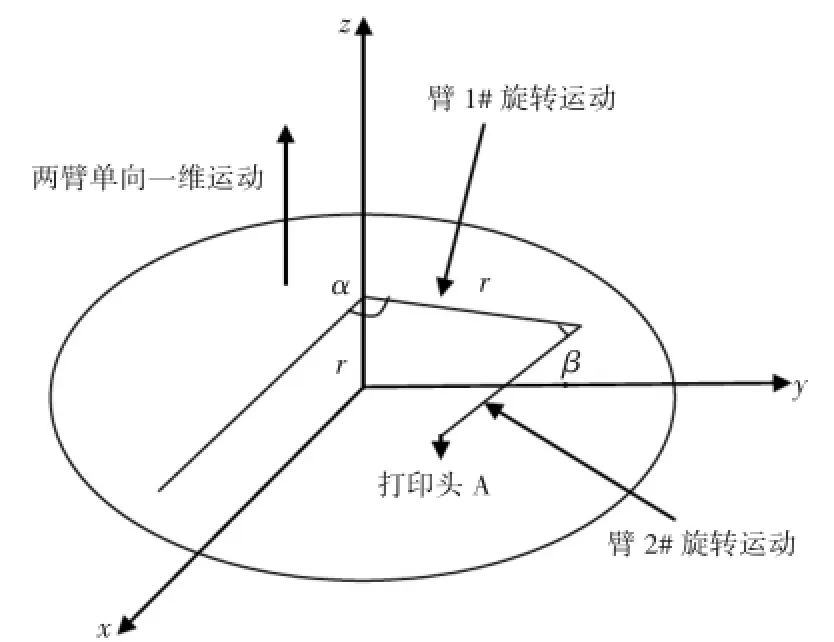
圖4 懸臂式結構
其結構特點為:基床靜止不動(或無需基床);在每一層級,兩懸臂做相對圓周運動,從而使打印頭做非線性運動(x-y平面);垂直方向上做一維直線運動(z軸)。
各維度運動方程為:
3.1Z軸直線運動方程為:

3.2x-y平面上,直角坐標點A(x,y)與兩懸臂的角坐標(α,β)關系為:
(1)當y值大于等于0.
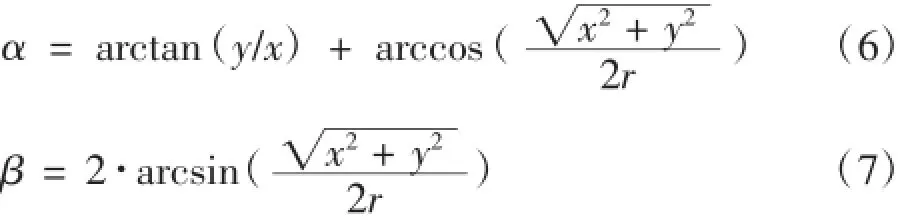
(2)當y值小于0.

其中:r為兩臂的長度;α為臂1#與x軸的夾角;β為臂2#與臂1#之間的夾角。
因旋轉臂由電機軸旋轉帶動,所以懸臂每轉動1單位距離弧長所需脈沖數如下:

由以上各方程可知,懸臂式結構3D打印機具有更高的響應速度和移動速度,且精度易于調節,空間利用率可達100%.因此,懸臂式3D打印機能以較小的體積和較高的速度、精度,打印出更大尺寸的打印件。
4 結論
懸臂式3D打印機除具備一般3D打印機功能外,還具有結構簡單、改裝方便的特點,而且可以擺脫基床的束縛,直接在工作對象上打印。如飛機機身表面噴漆、補漆,懸臂式打印機可以把機身作為基床,直接將設計圖案打印在機身上,實現設計與施工無縫對接,并可以滿足在無人環境下,以最小的原料消耗,最低的環境污染,打印出高質量的漆層。懸臂式3D打印機高效的空間利用率,更加適應民航維修活動空間狹小的特點,可針對相同的任務,設計出質量高、體積小、易于操作的打印機,為在局促的空間實現在翼修復創造可能性。同時,較高的打印速度,可以減少飛機停場時間。
[1]楊恩泉.3D打印技術對航空制造業發展的影響[J].航空科學技術,2013,(1):16-17
[2]王雪瑩.3D打印技術與產業的發展及前景分析[J].中國高新技術企業,2012,(26):3-5.
The Design and Research of Cantilever 3D Printers and Application in Civil Aviation Maintenance
QIU Ji-lun
(China Eastern Airlines Co.,Shanghai 200335,China)
Based on the movement modal analysis of two types of 3D printers,design a new type of printers,cantilever 3D printers.Maybe it is more suitable for civil aviation maintenance.Cantilever printers have some characteristics:high work efficiency,high space utilization,without bed.
3D print;cantilever;aviation maintenance;movement mode
TP334.8
A
1672-545X(2016)10-0037-03
2016-07-30
邱基倫(1983-),男,廣西人,學士學位,助理工程師,從事工程管理、航線維護、新技術開發應用等工作。
