BDS+GPS雙系統(tǒng)多頻RTK算法研究
2016-12-15 01:56:05袁宏超秘金鐘徐彥田谷守周祝會(huì)忠
測(cè)繪通報(bào) 2016年9期
關(guān)鍵詞:系統(tǒng)
袁宏超,秘金鐘,徐彥田,谷守周,祝會(huì)忠
(1. 屈家?guī)X管理區(qū)城鄉(xiāng)建設(shè)管理局,湖北 荊門(mén) 431821; 2. 中國(guó)測(cè)繪科學(xué)研究院,北京 100830;3. 遼寧工程技術(shù)大學(xué)測(cè)繪與地理科學(xué)學(xué)院,遼寧 阜新 123000)
BDS+GPS雙系統(tǒng)多頻RTK算法研究
袁宏超1,2,3,秘金鐘2,徐彥田2,谷守周2,祝會(huì)忠3
(1. 屈家?guī)X管理區(qū)城鄉(xiāng)建設(shè)管理局,湖北 荊門(mén) 431821; 2. 中國(guó)測(cè)繪科學(xué)研究院,北京 100830;3. 遼寧工程技術(shù)大學(xué)測(cè)繪與地理科學(xué)學(xué)院,遼寧 阜新 123000)
目前北斗衛(wèi)星導(dǎo)航系統(tǒng)(BDS)已建成區(qū)域?qū)Ш叫亲⒕邆淞烁采w亞太地區(qū)的導(dǎo)航定位服務(wù)能力。作為全球第一個(gè)全星座播發(fā)三頻衛(wèi)星導(dǎo)航信號(hào)的衛(wèi)星系統(tǒng),北斗三頻RTK定位性能進(jìn)入實(shí)測(cè)驗(yàn)證階段,而且BDS+GPS雙系統(tǒng)多頻RTK定位算法也待進(jìn)行算法驗(yàn)證。本文基于非組合RTK定位模型,采用Kalman濾波算法,并根據(jù)在成都實(shí)測(cè)的BDS三頻與GPS雙頻數(shù)據(jù),對(duì)各種定位模式下的定位性能進(jìn)行分析和比較。結(jié)果表明,該算法可以兼容不同解算系統(tǒng)和不同頻率組合的要求,可以實(shí)現(xiàn)多頻多系統(tǒng)RTK定位。雙系統(tǒng)聯(lián)合定位精度要高于各個(gè)單系統(tǒng)定位。在衛(wèi)星幾何構(gòu)型較好的情況下,三頻定位精度相對(duì)于雙頻短距離RTK定位精度的改善有限,其中BDS單頻與GPS單頻精度最高。在衛(wèi)星幾何構(gòu)型較差的情況下,頻率的增加可以提高RTK作業(yè)的可能性。
北斗衛(wèi)星導(dǎo)航系統(tǒng);三頻;RTK;聯(lián)合定位;多頻
北斗衛(wèi)星導(dǎo)航系統(tǒng)(BDS)是我國(guó)自主研制開(kāi)發(fā)的、具有自主知識(shí)產(chǎn)權(quán)的衛(wèi)星導(dǎo)航定位系統(tǒng),是繼美國(guó)的GPS、俄羅斯的GLONASS之后,國(guó)際上可定位的第3個(gè)衛(wèi)星導(dǎo)航系統(tǒng)。目前,北斗衛(wèi)星導(dǎo)航系統(tǒng)已開(kāi)始向亞太地區(qū)正式提供連續(xù)無(wú)源定位、導(dǎo)航、授時(shí)等服務(wù)[1]。單星座定位存在一些不足,如可見(jiàn)衛(wèi)星有限、穩(wěn)定性不強(qiáng)等,因此多頻多系統(tǒng)導(dǎo)航定位研究成為導(dǎo)航定位的一個(gè)新的熱點(diǎn)。采用多頻多系統(tǒng)組合定位,將會(huì)使衛(wèi)星數(shù)目成倍增加,有利于增強(qiáng)衛(wèi)星幾何圖形強(qiáng)度,提高定位精度及穩(wěn)定性[2]。同時(shí)多頻多系統(tǒng)的發(fā)展,對(duì)不同系統(tǒng)和不同頻率的定位模型的兼容性和擴(kuò)展性問(wèn)題也提出了挑戰(zhàn)[3],本文基于非組合算法很好兼容了不同頻率和不同系統(tǒng)的定位解算。
一、數(shù)學(xué)模型
1. GPS與BDS定位的時(shí)空基準(zhǔn)統(tǒng)一
在組合導(dǎo)航定位中接收機(jī)需要接收不同衛(wèi)星星座的導(dǎo)航信息,由于各系統(tǒng)之間存在著一定的系統(tǒng)偏差,因此在進(jìn)行多模組合導(dǎo)航定位中需要考慮時(shí)空統(tǒng)一的問(wèn)題[2,4-5]。
BDS與GPS采用的時(shí)間基準(zhǔn)不同。BDS采用的是時(shí)間基準(zhǔn)是北斗時(shí)(BeiDou Navigation Satellite System Time,BDT)。GPS采用的時(shí)間基準(zhǔn)是GPS時(shí)間(GPST Time,GPST)。北斗起算時(shí)間是2006年1月1日00:00:00,GPS起算時(shí)間是1980年1月6日00:00:00,而且兩個(gè)時(shí)間系統(tǒng)都無(wú)閏秒。起算時(shí)間不一致,需要將時(shí)間都轉(zhuǎn)換到GPST使得時(shí)間基準(zhǔn)得到統(tǒng)一。
雖然BDS采用了CGCS2000坐標(biāo)系,GPS采用了WGS-84坐標(biāo)系,但是這兩個(gè)坐標(biāo)系統(tǒng)的坐標(biāo)原點(diǎn)、定向一致,由兩個(gè)坐標(biāo)系的參考橢球的扁率差異引起同一點(diǎn)在CGCS2000坐標(biāo)系和WGS-84坐標(biāo)系內(nèi)的坐標(biāo)變化,對(duì)于短基線的影響,在本次試驗(yàn)忽略不計(jì),近似認(rèn)為屬于同一參考框架。
2. GPS+BDS非組合RTK解算模型
雙差觀測(cè)值具有可消除接收機(jī)鐘差和衛(wèi)星鐘差,大大削弱衛(wèi)星星歷誤差、電離層延遲誤差、對(duì)流層延遲誤差等誤差影響的優(yōu)點(diǎn),而且雙差模糊度具有整數(shù)特性[6-7]。因此,本文采用非組合雙差觀測(cè)值進(jìn)行雙系統(tǒng)的RTK解算。雙系統(tǒng)非組合相對(duì)定位的雙差觀測(cè)方程為
(1)
(2)
(3)
(4)
3. 附有模糊度參數(shù)的卡爾曼濾波模型
利用式(1)—式(4)雙差觀測(cè)方程構(gòu)造離散系統(tǒng)卡爾曼濾波的狀態(tài)方程和觀測(cè)方程
Xk=Φk,k-1Xk-1+Wk-1
(5)
Lk=HkXk+Vk
(6)
式中,k-1、k分別表示第k-1時(shí)刻和第k時(shí)刻;Φk,k-1為狀態(tài)轉(zhuǎn)移矩陣;L為觀測(cè)值向量;H表示系數(shù)矩陣;X表示狀態(tài)向量;W表示動(dòng)態(tài)噪聲向量;V表示觀測(cè)噪聲向量。其中,狀態(tài)向量X為

(7)

式(7)狀態(tài)向量中位置參數(shù)初始值可采用單點(diǎn)定位的結(jié)果。單差模糊度的初始值可由單差相位觀測(cè)值和單差偽距觀測(cè)值得到,對(duì)應(yīng)的標(biāo)準(zhǔn)差設(shè)為30周。
卡爾曼濾波是一種遞歸估計(jì),僅需知道上一時(shí)刻的狀態(tài)估計(jì)值及其協(xié)方差和當(dāng)前時(shí)刻的觀測(cè)值就可計(jì)算得到當(dāng)前時(shí)刻狀態(tài)估計(jì)值,而不需要記錄歷史信息。因此,可以利用位置均值的自適應(yīng)算法[8-9]給出狀態(tài)方程及預(yù)測(cè)值的方差陣
(8)
(9)

根據(jù)卡爾曼濾波模型計(jì)算增益矩陣
(10)

(11)
Pk/k=(I-KkHk)Pk/k-1
(12)
通過(guò)濾波得到雙差模糊度的浮點(diǎn)解及方差陣協(xié)方差矩陣后,采用整數(shù)最小二乘降相關(guān)分解法(LMABDA)解算雙差整周模糊度值[10-11]。LAMABDA方法采用最小二乘估計(jì),目標(biāo)函數(shù)為
(13)

(14)

二、BDS三頻與GPS雙頻實(shí)測(cè)數(shù)據(jù)的算例試驗(yàn)與分析
1. BDS三頻與GPS雙頻數(shù)據(jù)測(cè)試
本文采用的數(shù)據(jù)是利用Trimble Net R9多頻接收機(jī)在四川省采集的一條13.5 km的基線數(shù)據(jù)。利用四川省成都GPS+BDS雙系統(tǒng)連續(xù)運(yùn)行參考站作為參考站。在距離參考站約13.5 km處架設(shè)測(cè)站,連續(xù)觀測(cè)約2 h,觀測(cè)時(shí)間為2015年8月7日,采樣間隔為1 s,截至衛(wèi)星高度角為15°。
圖1表示在觀測(cè)時(shí)段內(nèi)基準(zhǔn)站和流動(dòng)站各系統(tǒng)的共視衛(wèi)星的數(shù)目。圖2表示在觀測(cè)時(shí)段內(nèi)各系統(tǒng)的PDOP值變化。目前北斗系統(tǒng)在軌運(yùn)行的GEO衛(wèi)星和IGSO衛(wèi)星較多,因此在該時(shí)段觀測(cè)的衛(wèi)星數(shù)量較穩(wěn)定,最多10顆衛(wèi)星,最少9顆衛(wèi)星,PDOP值變化也在2~3之間。GPS衛(wèi)星數(shù)量變化比較大,衛(wèi)星數(shù)量為5~8顆。在觀測(cè)時(shí)段08:50至09:20之間,GPS觀測(cè)數(shù)據(jù)質(zhì)量較差,部分衛(wèi)星L1或L2觀測(cè)值沒(méi)有導(dǎo)致共視衛(wèi)星較少。其PDOP在相應(yīng)的時(shí)段也出現(xiàn)了較大的變化。
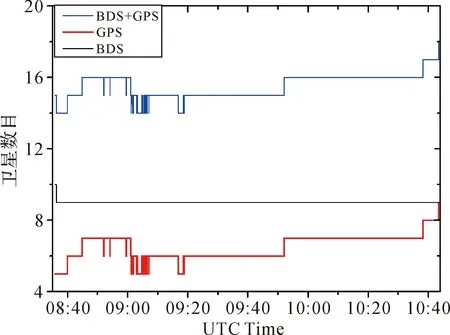
圖1 衛(wèi)星數(shù)目變化
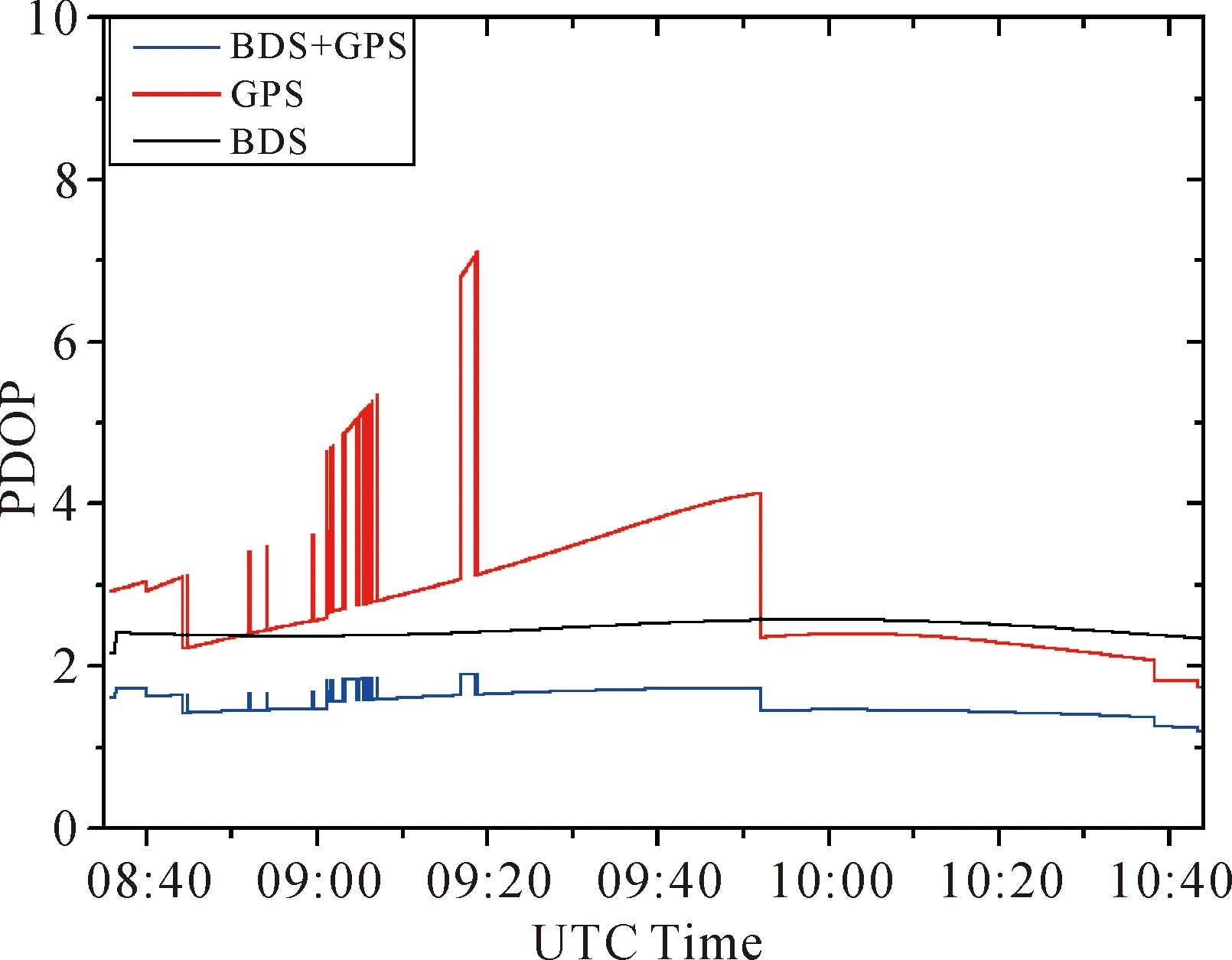
圖2 PDOP值
圖3—圖5分別表示各系統(tǒng)RTK定位誤差序列。各個(gè)系統(tǒng)初始化時(shí)間都為1 s。從圖中可知雙系統(tǒng)聯(lián)合定位的結(jié)果要優(yōu)于各個(gè)單系統(tǒng)定位結(jié)果。BDS三頻定位結(jié)果變化相對(duì)平緩,誤差序列總體上都在-5~5 cm之間變化。GPS觀測(cè)時(shí)段08:50至09:20之間定位結(jié)果變化較為劇烈,主要原因就是衛(wèi)星數(shù)量的變化,但是大部分歷元都在-5~5 cm之間變化。雙系統(tǒng)所有定位結(jié)果都在-5~5 cm之間變化。雙系統(tǒng)定位結(jié)果要優(yōu)于各個(gè)單系統(tǒng)的定位精度,BDS三頻定位結(jié)果和GPS雙頻定位結(jié)果相當(dāng)。
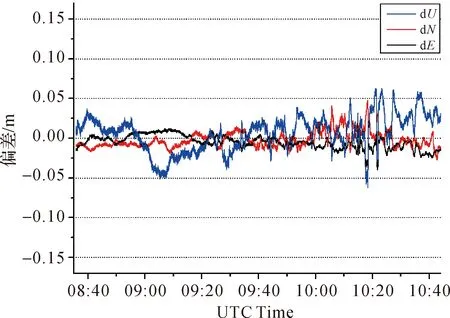
圖3 BDS三頻RTK誤差序列
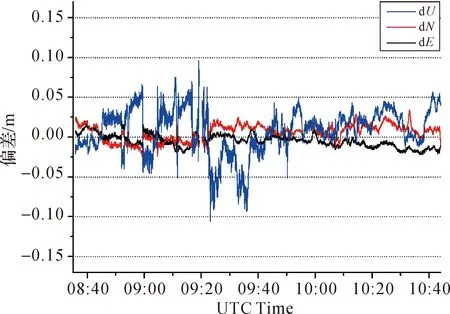
圖4 GPS雙頻RTK誤差序列
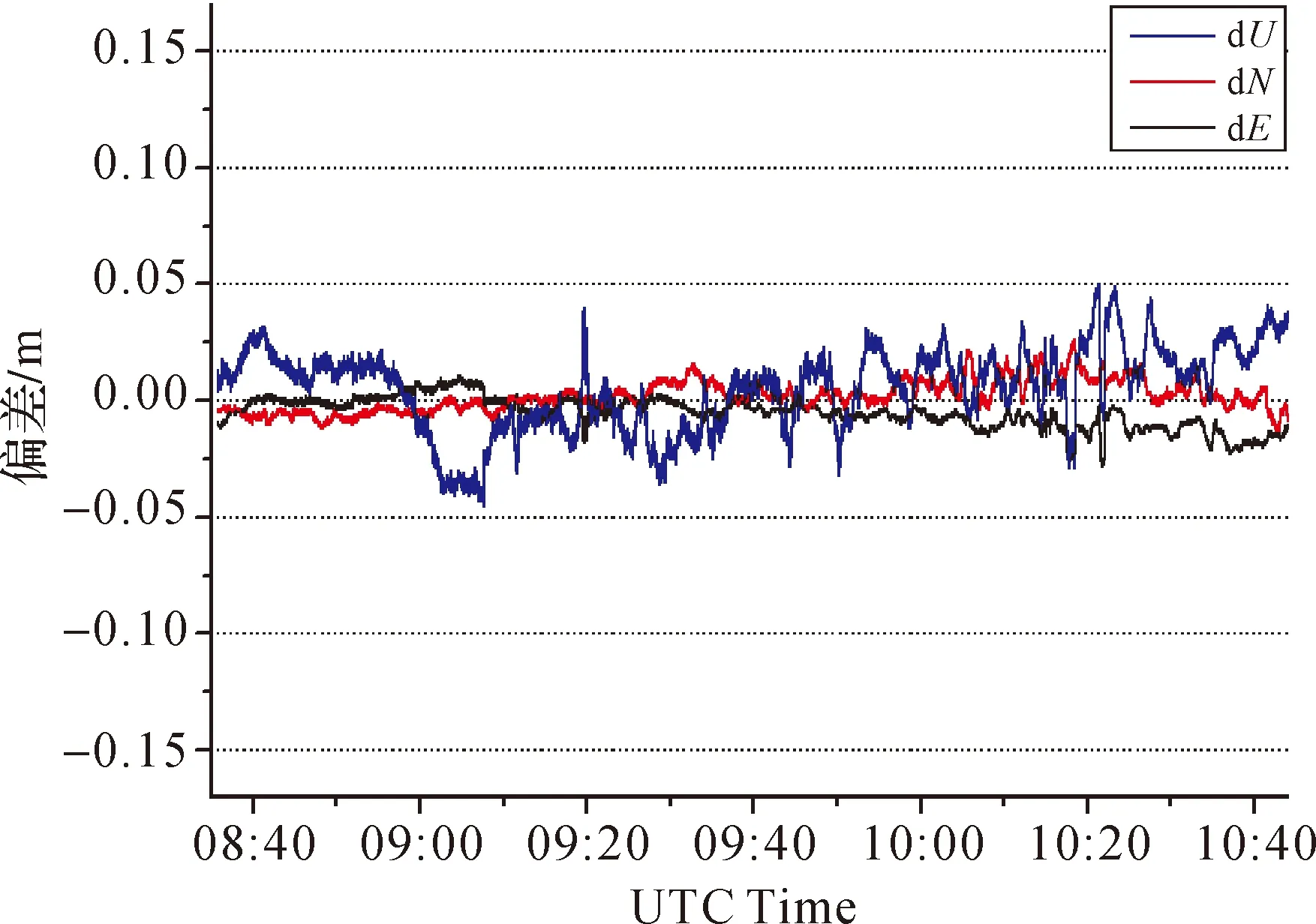
圖5 BDS三頻/GPS雙頻RTK誤差序列
2. 各系統(tǒng)的定位精度和初始化數(shù)據(jù)統(tǒng)計(jì)
為了測(cè)試不同的系統(tǒng),以及頻率增加所帶來(lái)的影響,本文測(cè)試BDS單頻、BDS雙頻、BDS三頻、GPS單頻、GPS雙頻、BDS單頻+GPS單頻、BDS雙頻+GPS雙頻、BDS三頻+GPS雙頻8種解算系統(tǒng)在該時(shí)段的初始化時(shí)間及定位結(jié)果,并分析了各種頻率和各系統(tǒng)組合的解算結(jié)果。測(cè)試結(jié)果見(jiàn)表1、表2。
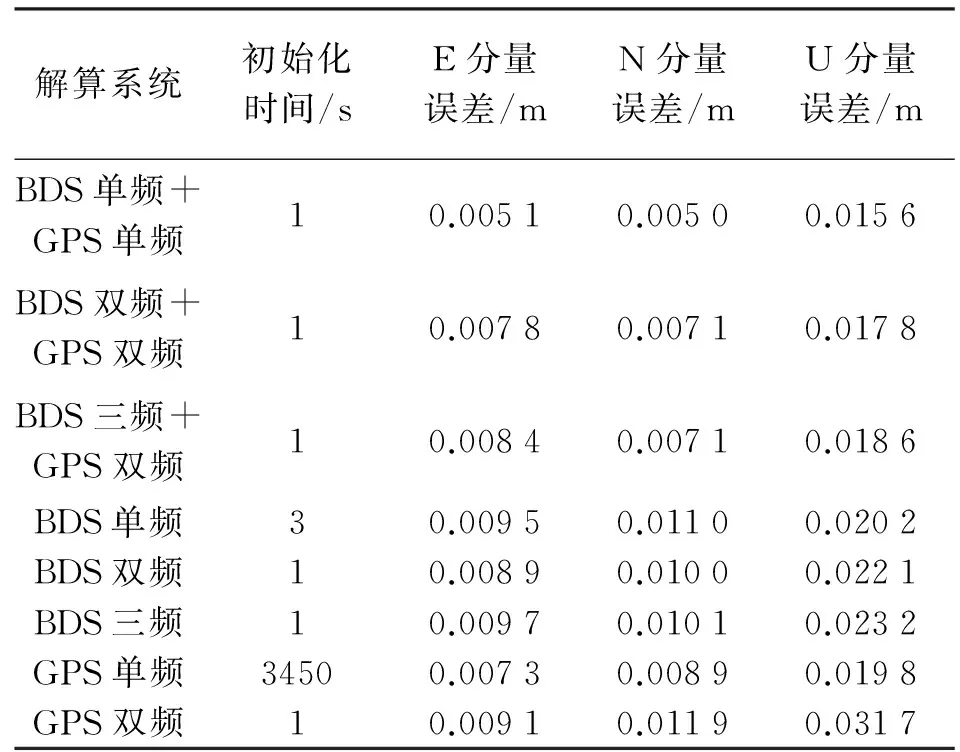
表1 初始化時(shí)間和解算誤差RMS值
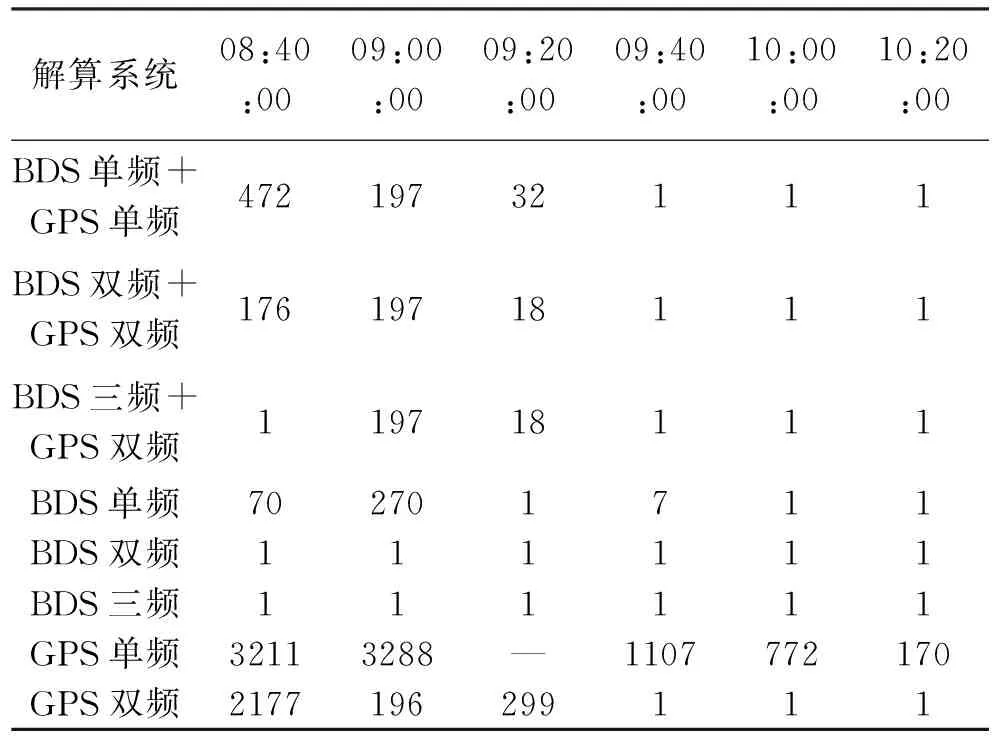
表2 不同時(shí)刻的初始化測(cè)試 s
表1統(tǒng)計(jì)各系統(tǒng)各頻率組合在E、N、U方向上的RMS值。為了更加直觀表示各系統(tǒng)和各頻率組合對(duì)定位精度的影響,本文將各系統(tǒng)各頻率位置精度統(tǒng)計(jì)如圖6所示,其中BDS/GPS(三)表示BDS三頻+GPS雙頻定位模式。從表1和圖6中可知雙系統(tǒng)定位結(jié)果要優(yōu)于各個(gè)單系統(tǒng)解算結(jié)果。GPS單系統(tǒng)的解算結(jié)果和BDS單系統(tǒng)的解算結(jié)果相當(dāng),都可以達(dá)到厘米級(jí)的定位結(jié)果,滿足RTK定位要求。GPS雙頻解算結(jié)果明顯低于GPS單頻解算結(jié)果,主要原因是GPS單頻初始化時(shí)間,參與精度統(tǒng)計(jì)的固定解較少。對(duì)比GPS單系統(tǒng)的單頻和雙頻可以發(fā)現(xiàn):在衛(wèi)星數(shù)量較少或衛(wèi)星數(shù)據(jù)質(zhì)量較差的情況下,多頻的發(fā)展可以增強(qiáng)單系統(tǒng)可用性。對(duì)比BDS單頻、BDS雙頻、BDS三頻的解算結(jié)果可以發(fā)現(xiàn):在衛(wèi)星數(shù)量較多的情況下,對(duì)于常規(guī)RTK,隨著頻率的增加,所解算的RMS誤差也增加。類似的情況也出現(xiàn)在雙系統(tǒng)解算中,BDS單頻+GPS單頻解算的精度最高。這可能與各系統(tǒng)的第二個(gè)頻率信號(hào)相對(duì)于第一個(gè)頻率信號(hào)穩(wěn)定性較差,以及與各系統(tǒng)相對(duì)于B1和L1頻率相比,頻率較小的B2、B3與L2頻率所受到雙差電離層延遲影響可能更大有關(guān)。
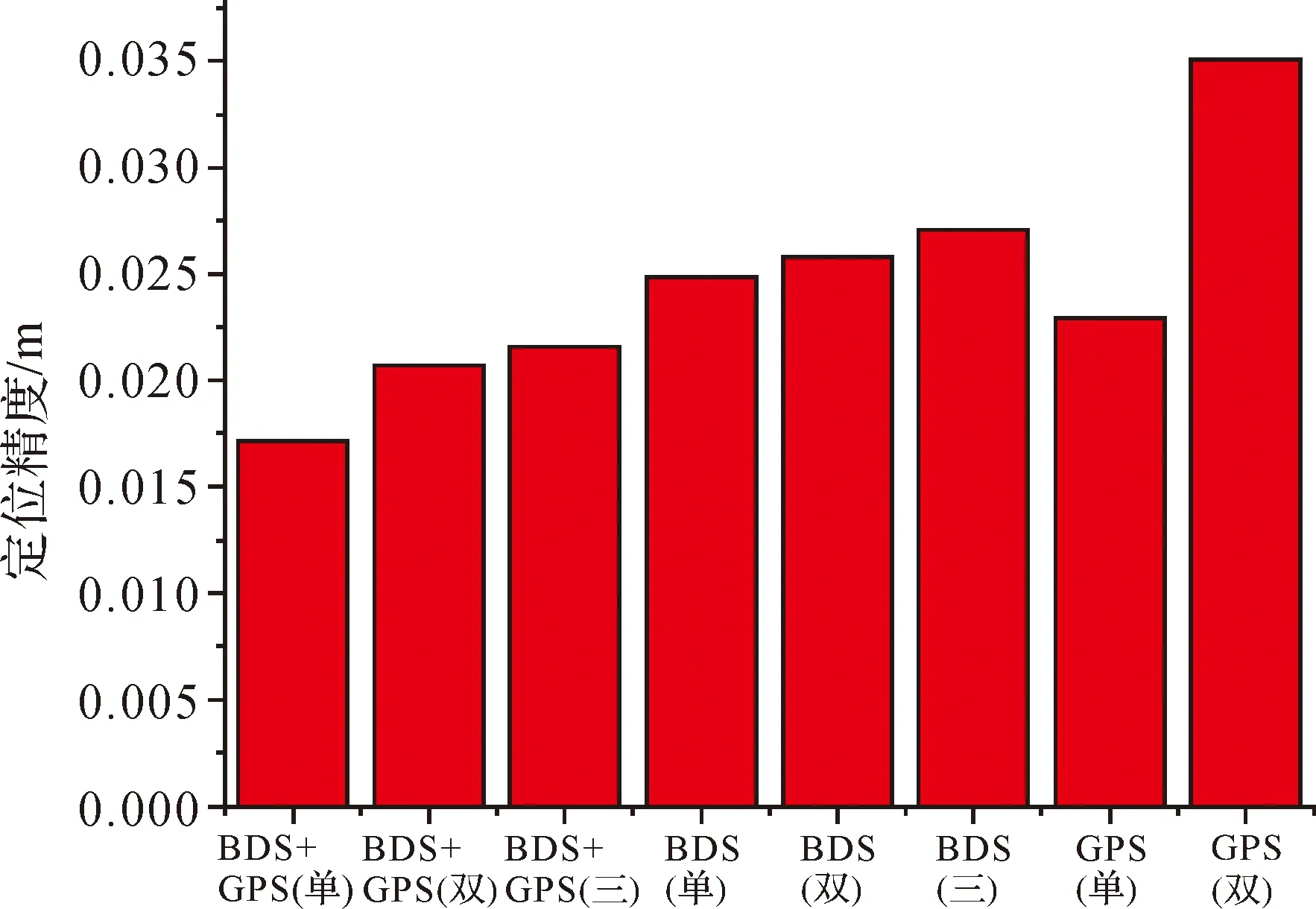
圖6 各系統(tǒng)各頻率位置精度統(tǒng)計(jì)結(jié)果
為了測(cè)試RTK定位初始化性能,本文在觀測(cè)時(shí)段中08:40:00、09:00:00、09:20:00、09:40:00、10:00:00、10:20:00六個(gè)節(jié)點(diǎn)上進(jìn)行了初始化測(cè)試。
表2中,—表示模糊度固定錯(cuò)誤。從表2可以看出,各系統(tǒng)單頻相對(duì)于各系統(tǒng)的雙頻、三頻初始化時(shí)間很長(zhǎng),可靠性較低。GPS單頻平均初始化時(shí)間為1710 s,主要原因是GPS在08:40:00至09:00:00觀測(cè)時(shí)段數(shù)據(jù)質(zhì)量較差,GPS雙頻初始化平均所需時(shí)長(zhǎng)為446 s,主要也是受到該時(shí)段的影響。雙系統(tǒng)在該時(shí)段的測(cè)試,隨著頻率的增加,大大縮短了初始化時(shí)間,BDS三頻+GPS雙頻效果最好,平均初始化時(shí)間為37 s。在09:40:00至10:20:00觀測(cè)時(shí)刻的GPS衛(wèi)星數(shù)量增加,GPS雙頻相對(duì)于GPS單頻初始化時(shí)間大大減少。在整個(gè)觀測(cè)時(shí)段,北斗衛(wèi)星一直很穩(wěn)定,幾何構(gòu)型較好,初始化很快。
三、結(jié)束語(yǔ)
隨著北斗系統(tǒng)的發(fā)展,多頻多系統(tǒng)成為研究熱點(diǎn)。多頻多系統(tǒng)的發(fā)展對(duì)定位模型兼容性等提出了要求。本文基于非組合RTK定位模型兼容了不同解算系統(tǒng)和不同頻率組合的要求,并測(cè)試出了各種組合后的結(jié)果。多頻多系統(tǒng)的發(fā)展增強(qiáng)了短距離RTK解算的穩(wěn)定性,大大縮短了初始化時(shí)間。特別是在衛(wèi)星幾何構(gòu)型較差的情況下,頻率的增加可以提高RTK作業(yè)的可能性。頻率的增加對(duì)于中長(zhǎng)距離的RTK電離層延遲的快速分離提供了一種可能性,因此多頻多系統(tǒng)中長(zhǎng)距離RTK解算也會(huì)成為未來(lái)一個(gè)熱點(diǎn)。
[1] 楊元喜,李金龍,王愛(ài)兵,等.北斗區(qū)域衛(wèi)星導(dǎo)航系統(tǒng)基本導(dǎo)航定位性能[J].中國(guó)科學(xué),2014,44(1):72-81.
[2] 張小紅,丁樂(lè)樂(lè),何俊.雙衛(wèi)星導(dǎo)航系統(tǒng)短基線動(dòng)態(tài)定位實(shí)驗(yàn)與對(duì)比分析[J].導(dǎo)航定位學(xué)報(bào),2014,2(2):26-30.
[3] 李金龍.北斗/GPS多頻實(shí)時(shí)精密定位理論與算法 [D].鄭州:信息工程大學(xué),2014.
[4] 高星偉,李毓麟,葛茂榮.GPS/GLONASS 相位差分的數(shù)據(jù)處理方法[J].測(cè)繪科學(xué),2004,29(2):22-24.
[5] 高星偉,過(guò)靜珺,程鵬飛,等.基于時(shí)空系統(tǒng)統(tǒng)一的北斗與GPS融合定位[J].測(cè)繪學(xué)報(bào),2012,41(5):744-748.
[6] 魏子卿,葛茂榮.GPS相對(duì)定位的數(shù)學(xué)模型[M].北京:測(cè)繪出版社,1988:93-94.
[7] 祝會(huì)忠,高星偉,秘金鐘,等.一種GPS整周模糊度單歷元解算方法[J].測(cè)繪科學(xué),2011,36(4):9-11.
[8] 崔希璋,於宗儔,陶本藻,等.廣義測(cè)量平差[M].武漢:武漢大學(xué)出版社,2012:136-150.
[9] 高為廣,楊元喜,張雙成.基于當(dāng)前加速度模型的抗差自適應(yīng)Kalman濾波[J].測(cè)繪學(xué)報(bào),2006,35(1):15-18.
[10] TEUNISSEN P J G.A Canonical Theory for Short GPS Baselines Part I:The Baseline Precision[J].Journal of Geodesy,1997(71):320-336.
[11] TEUNISSEN P J G.A Canonical Theory for Short GPS Baselines Part II:the Ambiguity Precision and Correlation[J].Journal of Geodesy,1997(71):389-400.
ResearchonMulti-frequencyRTKAlgorithmforBDS+GPSDualSystem
YUAN Hongchao,BEI Jinzhong,XU Yantian,GU Shouzhou,ZHU Huizhong
袁宏超,秘金鐘,徐彥田,等.BDS+GPS雙系統(tǒng)多頻RTK算法研究[J].測(cè)繪通報(bào),2016(9):5-8.
10.13474/j.cnki.11-2246.2016.0280.
P228
B
0494-0911(2016)09-0005-04
2015-11-23
科技部科技支撐計(jì)劃(2012BAB16B01);科技部863計(jì)劃(2013AA122501;2015AA124001);北斗分析中心(GFZX0301040308-06);國(guó)家自然科學(xué)基金(41304030;41504010); 四川測(cè)繪地理信息局科技支撐項(xiàng)目(J2014ZC01;J2015ZC01);中國(guó)測(cè)繪科學(xué)研究院基本科研業(yè)務(wù)費(fèi)(7771503)
袁宏超(1988—),男,碩士,研究方向?yàn)镚NSS高精度定位算法研究。E-mail:hongce0717@163.com
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32