基于LabVIEW數(shù)字PID直流電機調(diào)速系統(tǒng)的實現(xiàn)
2016-12-16 01:07:15施尚英
四川職業(yè)技術(shù)學(xué)院學(xué)報 2016年4期
施尚英
(四川職業(yè)技術(shù)學(xué)院電子電氣工程系,四川 遂寧 629099)
基于LabVIEW數(shù)字PID直流電機調(diào)速系統(tǒng)的實現(xiàn)
施尚英
(四川職業(yè)技術(shù)學(xué)院電子電氣工程系,四川遂寧629099)
該文介紹了直流電機的數(shù)學(xué)模型分析及利用傳統(tǒng)方法建立直流電機模型與傳遞函數(shù)的建立方法,并簡要介紹了PID控制原理及參數(shù)對控制性能的影響.根據(jù)直流電機傳遞函數(shù)與離散系統(tǒng)的PID函數(shù)關(guān)系,利用LabVIEW實現(xiàn)PID直流電機調(diào)速系統(tǒng)實現(xiàn)方法,最后給出了數(shù)字PID控制的LabVIEW程序圖實現(xiàn)數(shù)字PID直流電機調(diào)速.
數(shù)字PID;直流電機;傳遞函數(shù);離散;LabVIEW
PID(比例P-積分I-微分D)控制器是一個在工業(yè)閉環(huán)控制系統(tǒng)應(yīng)用中常見的一種模糊自動控制算法,具有原理簡單、適用性廣、魯棒性好、控制參數(shù)相互獨立和可靠性高等特點.本文以直流電機調(diào)速系統(tǒng)為例,介紹了直流電機的數(shù)學(xué)模型分析及利用傳統(tǒng)方法建立直流電機模型與傳遞函數(shù)的建立方法,分析推到并給出直流電機調(diào)速系統(tǒng)傳遞函數(shù),以及帶PID控制的系統(tǒng)框圖,簡單介紹了離散PID參數(shù)的整定方法,連續(xù)PID參數(shù)到離散化PID方程,最終通過LabVIEW虛擬儀器實現(xiàn)高效、快速、穩(wěn)定的直流電機調(diào)速控制.
1 直流電機的數(shù)學(xué)模型
直流電機是現(xiàn)今工業(yè)上應(yīng)用最廣的電機之一,直流電機具有良好的調(diào)速特性、較大的啟動轉(zhuǎn)矩、功率大及響應(yīng)快等優(yōu)點.
為實現(xiàn)快速可靠的數(shù)字PID直流電機調(diào)速系統(tǒng)控制,在系統(tǒng)設(shè)計中常通過建立直流電機數(shù)學(xué)模型的方式來分析并計算相關(guān)參量.
建立直流電機數(shù)學(xué)模型的基礎(chǔ)是直流電機的機械特性方程和電氣方程,對直流電機的電氣方程、直流電機的機械方程進行拉普拉斯變化即可得直流電機的轉(zhuǎn)速相對于輸入電壓的傳遞函數(shù)與電動機的數(shù)學(xué)模型.
上式中La為電樞電感(H),ia為電樞電流(A),ua為電樞電壓(V),ra為電樞電阻(Ω),Ce為電機電動勢系數(shù).
上式中T、TL為電動機轉(zhuǎn)矩和負載阻轉(zhuǎn)矩,其中T=Ctia,J為折算到電動機軸上的轉(zhuǎn)動慣量.
對直流電機的電氣方程、直流電機的機械方程進行拉普拉斯變化得到(3)式.

(3)式為直流電機轉(zhuǎn)速相對于輸入電壓的傳遞函數(shù)式為,式中Tm為直流電機的機械時間常數(shù),其公式關(guān)系為Tm=JRaCeCT;Ta為直流電機電氣時間常數(shù),其公式關(guān)系為Ta=LaRa.
直流電機的傳遞函數(shù)是一個二階無滯后傳遞函數(shù)。二階無滯后傳遞函數(shù)的數(shù)學(xué)模型:

由于Ta<<Tm,所以近似認為Tm+Ta≈Tm,k=1Ce。
對于(4)式,輸入幅度為a的階躍信號,階躍信號的時域相應(yīng)為:

2 利用傳統(tǒng)方法求解直流電機模型參數(shù)
直流電機一般包含磁極、電樞和電刷3個部分組成.其電氣結(jié)構(gòu)如圖1所示.在分析計算中一般采用工程估算方法分析技術(shù)直流電機的模型參數(shù).直流電機機械結(jié)構(gòu)與電路模型圖如圖1所示.根據(jù)直流電機的轉(zhuǎn)速相對于輸入電壓的傳遞函數(shù)與電動機的數(shù)學(xué)模型,結(jié)合圖2.1所示直流電機模型圖與工程設(shè)計估算方法可以得到直流電機模型相關(guān)參量估算公式:
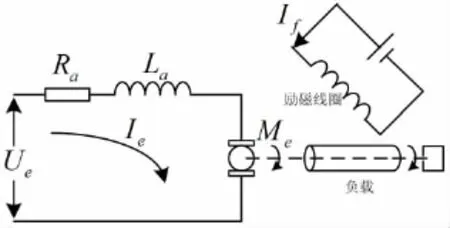
圖1 直流電機模型圖
式(8)中p為磁極對數(shù)
例如某一直流電機的主要參數(shù)為額定工作電壓220V、額定工作電流10.0A、額定輸出功率1.9KW、轉(zhuǎn)動慣量0.027J·S2、額定轉(zhuǎn)速377 rad/s.
利用直流電機模型參數(shù)的經(jīng)驗公式,可得Ra= 1.5Ω,Ce=0.56V.s/rad,La=0.235H,Me=5.3N.m,CT=0.51N.m/A,Ta=0.0129s,Tm=0.13Ss.
將Tm、Ta、Ce代入(3)式可得該直流電機的傳遞函數(shù)為:

3 PID控制原理及參數(shù)對控制性能的影響
PID控制器是一個在工業(yè)閉環(huán)控制系統(tǒng)應(yīng)用中常見的一種模糊自動控制算法,直流電機PID控制系統(tǒng)原理框圖如圖2所示,該閉環(huán)控制系統(tǒng)主要由控制目標給定值輸入信號rin(t)、反饋檢測變送信號f(t)、控制偏差(凈輸入信號)e(t)、PID(比例P-積分I-微分D)控制器、PID線性組合構(gòu)成被控對象控制量u(t)、被控對象等及部分組成.
通過轉(zhuǎn)速計對被控對象直流電機的當前轉(zhuǎn)速進行檢測處理后,經(jīng)過反饋網(wǎng)絡(luò)送入到控制偏差處理模塊與控制目標給定值進行誤差計算,然后經(jīng)過比例P、積分I、微分D運算與PID線性組合得帶電機轉(zhuǎn)速誤差控制量,修正電機當前轉(zhuǎn)速并最終實現(xiàn)電機當前轉(zhuǎn)速與給定的電機轉(zhuǎn)速保持一致.
PID控制器的控制偏差e(t)與輸出對象控制量u(t)關(guān)系為:
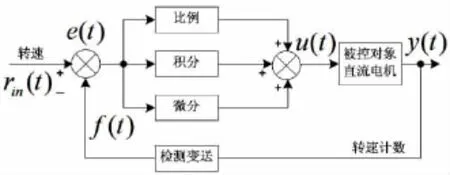
圖2 直流電機PID控制系統(tǒng)原理框圖

式中u(t)是被控對象(直流電機)輸入控制量,e(t)是控制偏差,Kp為PID控制器的比例系數(shù),Ti為PID控制器的積分速度,Td為PID控制器的微分時間常數(shù).
采用PID控制器的直流電機控制系統(tǒng)框圖如圖2所示.由PID控制器的輸入輸出關(guān)系,如式(14)所示,可得到直流電機PID控制系統(tǒng)傳遞函數(shù),其傳遞函數(shù)為:

由式(15)可見直流電機PID控制系統(tǒng)的比例、積分和微分三個控制環(huán)節(jié)相對獨立,在控制過程中改變比例、積分和微分單一參量規(guī)律可實現(xiàn)分別控制,也可同時改變多個參量實現(xiàn)多種規(guī)律控制.在PID控制器的比例、積分和微分控制各環(huán)節(jié)的主要特性為:
(1)比例環(huán)節(jié)P
在P調(diào)節(jié)中,調(diào)節(jié)器的輸出信號u(t)與偏差信號e(t)成比例,即u(t)=Kp.e(t),其中Kp稱為比例增益. Kp在較大時,偏差e(t)僅在一定的范圍內(nèi)與控制器的輸出保持線性關(guān)系.因此,比例控制有一定的應(yīng)用范圍,超過該范圍時,控制器輸出與輸入之間不成比例關(guān)系,存在穩(wěn)態(tài)誤差.
(2)積分環(huán)節(jié)I
(3)微分環(huán)節(jié)D
4 數(shù)字PID
連續(xù)PID經(jīng)數(shù)字離散化處理得到數(shù)字PID,數(shù)字PID控制比連續(xù)PID控制更為優(yōu)越,因為計算機程序的靈活性,很容易克服連續(xù)PID控制中存在的問題,經(jīng)修正而得到更完善的數(shù)字PID算法.數(shù)字化PID常見的有位置式PID控制算法、增量式PID控制算法兩大類.
實現(xiàn)數(shù)字PID的方法是將連續(xù)系統(tǒng)的微分方程應(yīng)由相應(yīng)的描述離散系統(tǒng)的差分方程來代替。離散化時,令

則有
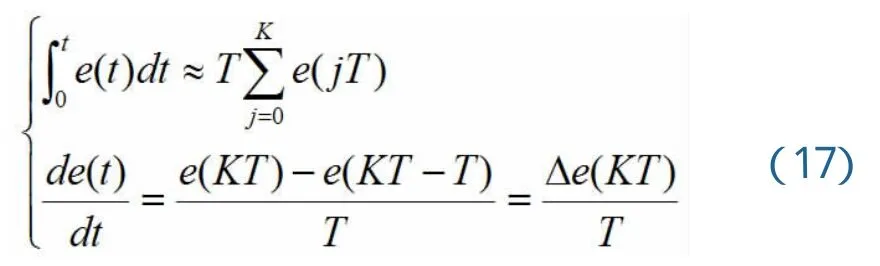
式中,e(KT)是第K次采樣所獲得的偏差信號;△e(KT)是本次和上次測量值的偏差,在給定值不變時,△e(KT)可表示為相鄰兩次測量值之差e(KT) -e(KT-T);T是采樣周期,采樣周期必須足夠短,才能保證有足夠的精度;K是采樣序號,K=0,1,2….
則離散系統(tǒng)的PID算式為:

在上式中所表示的控制算式中,其輸出值與閥位是一一對應(yīng)的,通常稱為PID的位置算式.在位置算式中,每次的輸出與過去的所有狀態(tài)有關(guān).
5 LabVIEW程序?qū)崿F(xiàn)
LabVIEW是由美國國家儀器(NI)公司研制開發(fā)的圖形化編輯語言G編寫程序開發(fā)環(huán)境,在測試測量、工控控制、數(shù)學(xué)建模仿真等領(lǐng)域應(yīng)用較為廣泛.基于LabVIEW實現(xiàn)數(shù)字PID直流電機調(diào)速系統(tǒng)的程序流程圖如圖3所示.
圖3 LabVIEW數(shù)字PID直流電機調(diào)速系統(tǒng)
6 結(jié)束語
本文重點介紹了數(shù)字PID算法在直流電機調(diào)速上實現(xiàn)的流程.根據(jù)直流電機傳遞函數(shù)與離散系統(tǒng)的PID函數(shù)關(guān)系,利用LabVIEW實現(xiàn)PID直流電機調(diào)速系統(tǒng)實現(xiàn)方法,最后給出了數(shù)字PID控制的LabVIEW程序圖實現(xiàn)數(shù)字PID直流電機調(diào)速.
[1]孫亮,楊鵬.自動控制原理[M].北京:北京工業(yè)大學(xué)出版社,2006.
[2]雷振山,肖成勇.LabVIEW高級編程與虛擬儀器工程應(yīng)用[M].北京:中國鐵道出版社,2009.
[3]鄭對元.LabVIEW虛擬儀器程序設(shè)計[M].北京:清華大學(xué)出版社,2012.
[4]豈興明,田京京,夏寧.LabVIEW入門與實戰(zhàn)開發(fā)100列[M].北京:電子工業(yè)出版社,2011.
[5]雷振山,肖成勇,魏麗,等.LabVIEW高級編程與虛擬儀器工程應(yīng)用[M].北京:中國鐵道出版社,2012.
責任編輯:張隆輝
TM33
A
1672-2094(2016)04-0174-03
2016-05-02
施尚英(1980-),女,四川簡陽人,四川職業(yè)技術(shù)學(xué)院講師,碩士.研究方向:電氣自動化,電子技術(shù).
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
