基于時間序列模型的雷達數據隨機誤差建模與補償
2016-12-16 04:31:06張瑞國李春雨丁志宏許文彤龐鈺寧葉君好
現代雷達 2016年11期
張瑞國,李春雨,丁志宏,許文彤,龐鈺寧,葉君好
(中國人民解放軍63726部隊, 銀川 750004)
?
·數據處理·
基于時間序列模型的雷達數據隨機誤差建模與補償
張瑞國,李春雨,丁志宏,許文彤,龐鈺寧,葉君好
(中國人民解放軍63726部隊, 銀川 750004)
針對雷達數據隨機誤差超差的問題,分析了非平穩時間序列自回歸求和滑動平均(ARIMA)模型,并以雷達某次實測國際空間站數據的前4 000點數據建立ARIMA模型,設計了基于此模型的Kalman濾波器,利用所設計濾波器對雷達前4 000點數據和剩余數據分別進行了濾波處理,補償后誤差為原數據的13.7%和20.1%。結果表明:該方法能有效降低雷達測量數據隨機誤差,提高數據質量。
隨機誤差補償;非平穩時間序列;卡爾曼濾波
0 引 言
雷達測量數據的隨機誤差是衡量設備性能的重要指標之一,直接關系到雷達數據的使用質量,如:高精度軌道擬合、不同雷達間數據融合比較、事后目標特征參數提取等[1-2]。在雷達設計時,常采用良好的器件從硬件上降低系統內部噪聲,或采用濾波方法從算法上進行數據平滑,使隨機誤差滿足指標要求[3-4]。但由于器件性能下降和使用環境變化等因素,雷達內部噪聲起伏較大,加之目標在飛行過程中相對雷達會出現航捷點、姿態翻滾等特殊動作,實時濾波模型很難達到十分精確,導致雷達測量數據的隨機誤差往往變大甚至超差,嚴重影響數據質量。雷達研制完成后,其內部硬件和算法一般不再更改,而通過事后數據處理來降低隨機差是一種可行有效的手段。
時間序列分析方法是一種描述動態數據統計特性的理論和方法,它可以從有限的樣本數據中擬合出具有一定精度的時間序列模型。時間序列模型的突出特點是建模樣本數量少,且方便實用,是隨機誤差建模與補償的有效手段,在導航、雷達跟蹤預報、目標識別等方面得到了廣泛應用[5-8]。本文在對雷達測量數據平穩性分析的基礎上,建立了雷達數據的自回歸和滑動平均(ARIMA)模型,并以所建的ARIMA模型為系統方程,雷達測量數據為量測量,設計了Kalman濾波器。濾波補償結果表明:本文方法對雷達數據的隨機誤差具有較好的抑制作用。
1 時間序列模型
時間序列分析法把平穩的有色噪聲序列看作由時刻相關的序列和各時刻出現的白噪聲組成[9],即k時刻的有色噪聲為
xk= φ1xk-1+φ2xk-2+…+φpxk-p+
ak-θ1ak-1-θ2ak-2-…-θqak-q
(1)
式中:φi<1(i=1,2,…,p)為回歸參數;θi<1(i=1,2,3,…,q)為滑動平均參數;ak為白噪聲序列。
式(1)即為自回歸滑動平均模型ARMA(p,q),是一種表示有色噪聲的遞推方程,對于平穩的時間序列,可直接采用ARMA(p,q)進行建模[9]。
在雷達實際測量中,目標通常是運動的,雷達測量數據顯然是非平穩的,不能直接采用ARMA進行建模。工程上一般通過多次差分,剔除趨勢項,使原序列滿足平穩性要求,再采用ARMA建模,之后由ARMA模型反推出原非平穩數據的時間序列模型,即ARIMA建模。
非平穩時間序列的ARIMA模型可表示為[10]
Φ(B)xk=θ(B)ak
(2)
與式(1)相比,式(2)包含d階差分算子d=(1-B)d,在對非平穩序列建模時,通過將d階差分算子作用于原非平穩時間序列{xk},可得到平穩時間序列}。每次對數據序列差分后都要檢驗新形成序列的平穩性,直到新序列通過平穩性檢驗,此時得到的差分次數為ARIMA(p,d,q)模型中的差分算子階數d。

(3)
2 時間序列Kalman濾波器設計
時間序列模型描述了數據序列內在的變化關系,可將所建ARIMA模型看作動態數據輸出系統,進而得到Kalman濾波器的系統方程。以雷達實測數據作為外部量測量,得到量測方程。
依據ARIMA(p,d,q)模型中自回歸系數的階數p和差分階數d可確定系統狀態量為Xk=[xk,xk-1,xk-2,…,xk-(p+d-1)]T,系統狀態方程表示為
Xk=ΦXk-1+GWk
(4)
系統量測方程表示為
Zk=HXk+Vk
(5)
式中:H為量測矩陣,采用雷達實測數據作為量測值有H=[1 01×(p+d-1)];Vk為量測噪聲,等于雷達測量數據的噪聲方差。
3 雷達試驗數據建模與補償
某雷達受測速功能限制,目標測量時只能給出采用距離差分所得的徑向速度值,徑向速度隨機誤差通常較大,尤其對于國際空間站等大型空間目標測速數據隨機誤差嚴重超差,不利于目標軌跡參數提取、ISAR成像速度補償等數據分析與處理。通過對雷達測速數據隨機差建模與補償,可有效提高數據質量,有助于目標特征規律建立和完善。
本文以該雷達某次對國際空間站實測的測速數據為對象,對其隨機誤差進行建模與補償。測速原始數據如圖1所示。
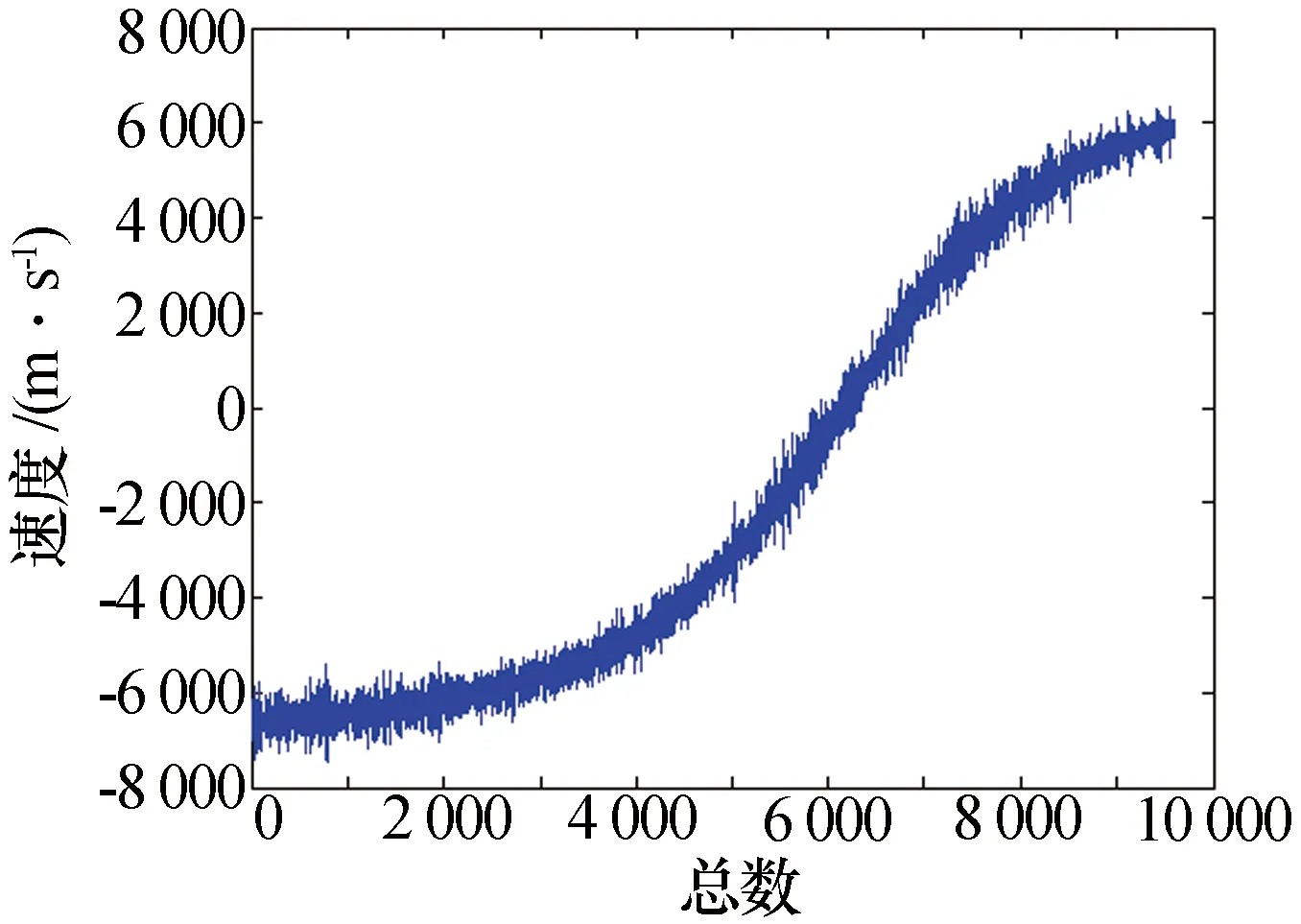
圖1 雷達某次對空間站測速原始數據
3.1 試驗數據建模
為檢驗本文方法的有效性,采用圖1中前4 000點的數據進行建模,用所建模型對全部測速數據進行濾波處理,檢驗模型的正確性。

圖2 雷達前4 000點測速原始數據
從圖2可以看出,雷達測速數據是非平穩的。在進行時間序列分析建模時,先通過多次差分方法將趨勢項從非平穩時間序列中直接剔除,并采用逆序檢驗法對數據進行平穩性檢驗[9]。在滿足平穩性要求后,利用ARMA模型進行建模,之后通過差分算子反求出原始非平穩數據的ARIMA模型,具體建模流程如圖3所示。
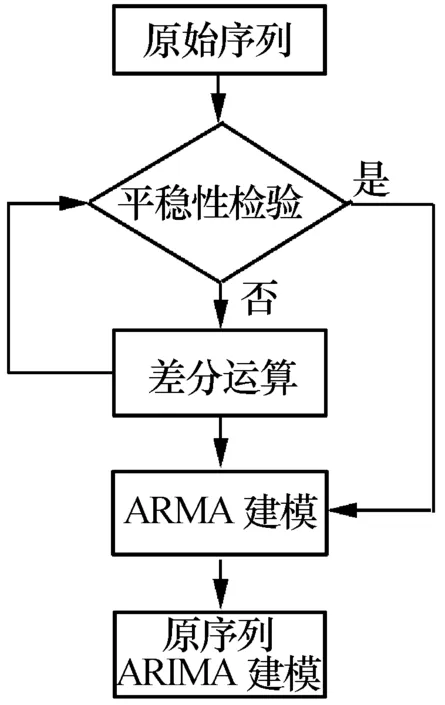
圖3 非平穩時間序列建模流程
依據圖3的建模流程,對原始測速數據通過兩次差分后,逆序法檢測平穩性結果為|u|=0.75<1.96,數據達到平穩性要求。測速數據的二階差分結果如圖4所示。
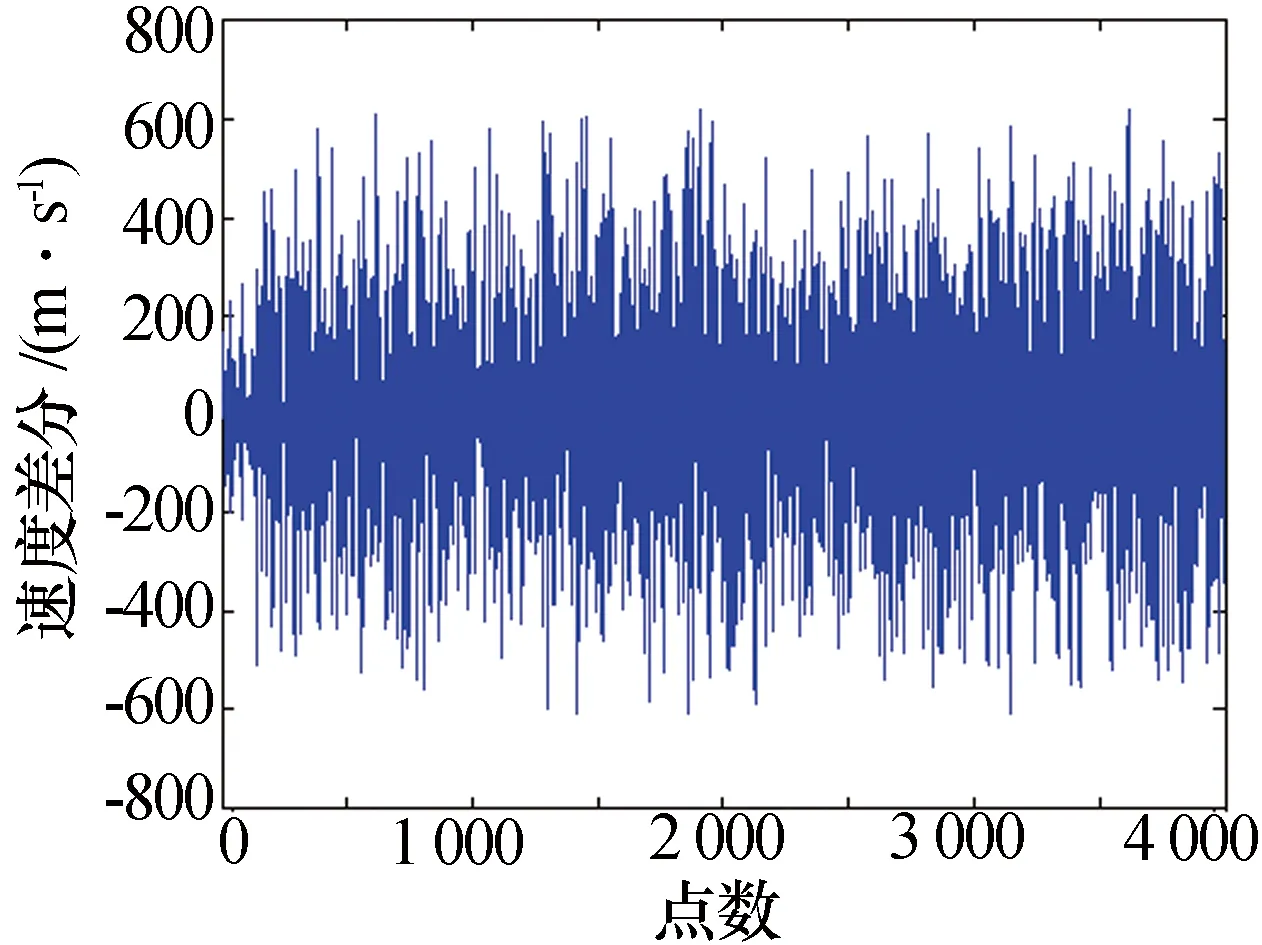
圖4 測速數據二階差分結果
在差分序列達到平穩性要求后,可建立ARMA(p,q)模型,采用相關分析方法,經BIC準則檢驗[10],確定AR(3)模型為適用模型,利用Matlab中的AR時間序列函數,得到其模型為
(6)
xk= 2.253 9xk-1-1.939 5xk-2+0.967 8xk-3-
0.132 7xk-4-0.149 5xk-5+ak
(7)
3.2 隨機誤差補償
以式(7)所建的時間序列模型作為系統方程,以雷達測量數據作為外部量測量,建立Kalman濾波器。
由式(7)可知,應選取五個連續的隨機數據作為Kalman濾波的系統狀態變量,即Xk=[xk,xk-1,xk-2,xk-3,xk-4]T,相應式(4)中系統狀態轉移矩陣為
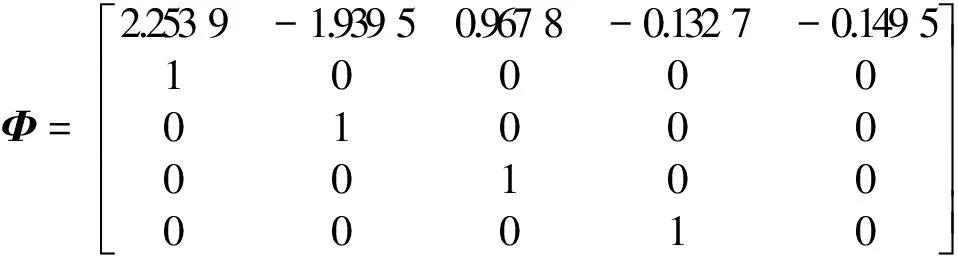
式(5)中系統量測矩陣為:H=[10000],Vk為量測噪聲,取值為測量數據的均方差。
用建立好的Kalman濾波器對全部雷達測速數據進行濾波處理,得到隨機誤差補償前后的徑向速度曲線,圖5為前4 000點測速數據誤差補償前后結果,圖6為剩余數據利用所建模型誤差補償前后結果,為直觀顯示補償前后效果,畫出了中間某段數據。

圖6 剩余測速數據隨機誤差補償前后對比
從圖5和圖6可看出,濾波補償后雷達測速數據比濾波補償前要平滑,隨機誤差得到極大抑制。通過差分方法剔除趨勢項[11],得到補償前后雷達測速數據的隨機誤差,求得隨機誤差均方差如表1所示。
表1 補償前后測速數據隨機誤差統計 (m·s-1)

從表1可以看出,前4 000點測速數據經過建模補償后,隨機誤差僅為原來的13.7%;剩余數據通過前4 000點數據所建模型進行濾波補償后,誤差也得到較大抑制,為補償前的20.1%。數據處理結果表明,本文通過1~4 000點有限樣本所設計的AR(3)模型能準確反映雷達徑向速度數據的變化規律,基于此模型的Kalman濾波器能有效抑制測速隨機誤差,提高雷達數據質量。本文方法相比于傳統分段最小二乘多項式擬合具有建模樣本少、受奇異值影響小等優點,是一種有效的雷達數據事后處理方法。
4 結束語
本文對非平穩時間序列建模進行了分析,并以雷達實測數據的前4 000點有限樣本建立ARIMA時間序列模型,設計了基于此模型的卡爾曼濾波器。利用所設計的濾波器對雷達前4 000點數據和剩余數據分別進行了隨機誤差濾波處理,補償后誤差分別為原數據的13.7%和20.1%。數據處理結果表明:本文通過有限樣本所建立的時間序列模型能較好地反映雷達數據的變化規律,有效抑制隨機誤差,解決雷達數據超差問題。本文方法具有工程實用意義,對雷達事后數據分析與處理具有較大應用價值。
[1] 姜大治, 王不了, 楊 軍. 多雷達含缺損信息外彈道解算方法研究[J]. 彈道學報, 2015, 27 (1): 44-47. JIANG Dazhi, WANG Buliao, YANG Jun. Research on algorithm for multi-radar trajectories with defect information[J]. Journal of Ballistics, 2015, 27 (1): 44-47.
[2] 王 成, 胡衛東, 郁文賢. 基于非平穩時間序列的雷達信號融合[J]. 信號處理, 2005, 21 (4): 338-343. WANG Cheng, HU Weidong, YU Wenxian. Radar signal fusion based on non-stationary time series processes[J]. Signal Processing, 2005, 21 (4): 338-343.
[3] 魏崇奎, 甘友誼, 葉正茂. 外測數據處理中噪聲分離模型的方法研究[J]. 現代雷達, 2007, 29 (8): 79-81. WEI Chongkui, GAN Youyi, YE Zhengmao. A study on method of noise departure model on data processing of trajectory measurement[J]. Modern Radar, 2007, 29 (8): 79-81.
[4] 孫國政, 王索建, 董 揚. 基于ADS-B數據的雷達精度測量方法[J]. 現代雷達, 2011, 33 (2): 18-21. SUN Guozheng, WANG Suojian, DONG Yang. Measurement method for radar precision based on ADS-B data[J]. Modern Radar, 2011, 33 (2): 18-21.
[5] DANG S W, TIAN W F, QIAN F. EMD-and LWT-based stochastic noise eliminating method for fiber optic gyro[J]. Measurement, 2011, 44: 2190-2193.
[6] 江 橋, 王學偉. 機載火控系統動態精度試驗數據處理方法研究[J]. 艦船電子對抗, 2005, 28(3) : 50-53. JIANG Qiao, WANG Xuewei. Research on data processing method of airborne fire control system dynamic precision test[J]. Shipboard Electronic Countermeasure, 2005, 28(3): 50-53.
[7] 饒 彬, 屈龍海, 肖順平, 等. 基于時間序列的彈道目標進動周期提取[J]. 電波科學學報, 2011,26 (2): 291-296. RAO Bin, QU Longhai, XIAO Shunping, et al. Precession period extraction of ballistic targets based on time series analysis[J]. Chinese Journal of Radio Science, 2011, 26 (2): 291-296.
[8] 朱 麗, 龍 兵, 劉 震. 基于ARMA的雷達發射機故障預測及其實現[J]. 計算機測量與控制, 2010, 18(11): 2460-2461. ZHU Li, LONG Bin, LIU Zhen. ARMA-based fault prediction for radar transmitter and its realization method[J]. Computer Measurement & Control, 2010, 18(11): 2460-2461.
[9] 徐 帆, 馬廣富. 基于ARIMA模型的光纖陀螺隨機漂移濾波方法研究[J]. 傳感器與微系統, 2007, 26(2) : 31-32. XU Fan, MA Guangfu. Investigation on filter method of FOG drift data based on ARIMA model[J]. Transducer and Microsystem Technologies, 2007, 26(2): 31-32.
[10] 張延順, 房建成. 小型動調陀螺隨機誤差建模與濾波方法研究[J]. 儀器儀表學報, 2007, 28(7) : 1286-1289. ZHANG Yanshun, FANG Jiancheng. Research on random error modeling and filtering method for dynamically tuned gyroscope[J]. Chinese Journal of Scientific Instrument, 2007, 28(7): 1286-1289.
[11] 呂韶昱, 郁春來, 萬偉建. 相控陣雷達外彈道測量事后數據處理軟件設計[J]. 計算機測量與控制, 2007, 15(3) : 399-401. Lü Shaoyu, YU Chunlai, WAN Weijian. Design of OLDPS of phased array radar in trajectory measurement[J]. Computer Measurement & Control, 2007, 15(3): 399-401.
張瑞國 男,1962年生,高級工程師。研究方向為相控陣雷達總體與目標識別。
李春雨 男,1987年生,工程師。研究方向為雷達數據處理與目標識別。
丁志宏 男,1972年生,高級工程師。研究方向為航天測控與系統總體。
許文彤 男,1970年生,高級工程師。研究方向為航天測控與系統總體。
龐鈺寧 男,1980年生,工程師。研究方向為測控系統總體。
葉君好 男,1985年生,工程師。研究方向為臨近空間大氣建模。
Modeling and Compensation of Radar Data Random Error Based on the Time-series Model
ZHANG Ruiguo,LI Chunyu,DING Zhihong,XU Wentong,PANG Yuning,YE Junhao
(The Unit 63726 of PLA, Yinchuan 750004, China)
Aiming at the problem of considerable radar data random error, the autoregressive integrated moving average (ARIMA) model is analyzed by time-series analysis method. The ARIMA model and Kalman filter are designed based on the foregoing 4 000 data points to smooth the radar data, which is obtained by measuring the International Space Station. The foregoing 4 000 data points and other points are processed by the filter respectively, and random error reduces to 13.7% and 20.1% of the original data separately. The results show that the random error of radar measurements can be reduced effectively by the new method, improving the data quality.
random error compensation; nonstationary time series; Kalman filtering
10.16592/ j.cnki.1004-7859.2016.11.011
李春雨 Email:spring0464@126.com
2016-08-23
2016-10-17
TP971.1
A
1004-7859(2016)11-0049-04
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
