動態場景中的視覺目標識別方法分析
2016-12-21 10:21焦迎雪
電子技術與軟件工程 2016年20期
焦迎雪
摘 要 當前動態場景中的視覺目標識別技術在生活中的角色越來越重要,在軍事應用,醫療衛生,交通指揮以及在人工智能方面都能看到該項技術的影子。其中圖像目標識別這一環節更是機械視覺領域所不能替代的,是計算機真正能夠擁有感知能力的一個重要途徑。隨著這幾年科技的不斷發展,目標識別技術也在飛速的提高,正在逐漸從研究階段轉變到現實的生活應用中。通過結合動態場景中受光照、視角以及背景等影響較大的目標對動態場景中的視覺目標識別,本文從視覺目標特征檢測與描述和目標識別等方面對動態場景的視覺目標識別方法展開研究。
【關鍵詞】目標識別 動態場景 特征檢測 描述 支持向量機 空間金字塔
1 動態場景中的視覺目標識別方法的背景及意義
視覺目標識別是一種利用圖像處理和模式識別領域的理論知識和方法,判斷并對存在的感興趣的目標賦予合理的解釋,在必要情況下甚至可以確定其位置。其中視覺目標識別的場景可以分為靜態場景和動態場景。現實中的場景大多數為動態場景,受到的環境因素特別大,比如光照條件的影響,場景中物物體的移動等等都會對整個識別環境的過程帶來很大的影響。因此,動態場景中視覺目標對工作人員的研究具有一定的挑戰。
2 動態識別系統的實際應用
2.1 輔助駕駛系統
輔助駕駛系統即為輔助駕駛員駕駛車輛或者可以使車輛進行自動駕駛的系統。輔助駕駛系統是一種通過雷達,紅外探測儀以及攝像頭,通過程序精確的為車輛判斷自身車輛與障礙物或者在行駛過程中的前方車輛的距離,保證車輛的安全行駛。在遇到緊急的情況的時候,車輛自身的系統可以聽過程序付出緊急警報或者自動剎車進行避讓,對車輛的行駛以及司機的生命安全做出保障。
2.2 交通監控系統
交通監控系統可以在車輛、交通、以及駕駛員之間建立起一種快速的通訊聯系,同時在道路發生擁堵以及道路上行駛的車輛發生故障時可以將這些信息以最快的速度傳輸給交通管理人員,使之坐車相應的安排。在功能作用上與機場的航空控制器的作用類似。
2.3 智能機器人系統
智能機器人系統是最近幾年普遍流行起來的技術。智能機器人系統可以根據外界條件的變化對自身的行為動作做出相應的調整,具有類似于人類一樣的感受,識別,推理以及判斷能力。這種智能機器人擁有一定的自動規劃的能力,可以在不需要認為的干預和照料下,能夠完全獨立的工作。智能機器人系統的發展將大幅度的改善人們的衣食住行,節約大量的勞動力。
2.4 智能監控系統
智能監控系統是指在嵌入式視頻服務器中集成了一些智能行為識別的算法。該系統可以自動對話場景中的人、車輛以及其他目標識別及判斷,并且在一定的程度上對可以對用戶進行信息提醒。智能監控系統可以廣泛的運用到現實生活中的諸多方面,比如物體識別,軌跡跟蹤,越界識別,車牌識別,異常行為識別等。在應用應用領域上,智能監控系統在各行各業中都得到了廣泛的應用,比如金融領域的營業大廳的監控,金庫的監控,自動提款機以及自助銀行的監控,商場的保安監控,超市,貨柜,倉庫的加官等等,交通領域的高速收費管理,交通違章,住宅小區以及商場停車場的無人監控等。
2.5 虛擬、增強現實技術
在醫學技術,工業設計,考古和娛樂等領域中,虛擬增強技術都有著十分重要的應用用價值。計算機可以通過虛擬現實和增強現實這項技術,模擬出一個虛擬的三維世界,以及將部分的虛擬場景添加到現實生活中去。可見,增強現實是在虛擬現實技術的基礎上來進行的,可以增加使用者的真實感,提高用戶的使用了樂趣。
上述領域中,目標識別都起著相對重要的作用,其中動態場景的視覺目標識別同時也是將目標識別推廣到實際應用的重要前提,因此開展動態場景中的視覺目標識別研究意義重大,具有十分廣泛的應用前景。
3 國內外對于動態場景中的視覺目標識別的現狀
從上世紀九十年代開始,麻省理工大學結合其他幾所高校就已經在美國的組織下,開始了民用和軍事上對于目標識別技術的研究。美國的幾所聯合起來的高校也共同研制除了可以通過顏色以及運動信息來識別道路和來往的車載視頻實時處理系統。國內在目標識別這個領域上也進行了很多年的研究,在人臉識別,車牌識別等方面也獲得了很杰出的成就。可是在目標識別的領域,國內外都存在著一定的問題,例如圖像中物體的分割,視點不同造成的表象差異,無標記圖像的學習等。因此圖像中感興趣物體的分割成為了目標識別的一個重要的難點。
4 目標識別模型介紹
4.1 對于目標識別模型的概述
目標識別模型主要的研究問題是如何對一個給定的目標進行建立模型的問題。在一個目標識別系統中,目標識別模型關系到目標特征以及學習、識別方法的選擇和確立,并且具有十分重要的作用。自本世紀以來,Bag of words模型以及Parts based methods 模型已經逐漸成為了最廣泛的使用模型,同時也取得了巨大的成功。但是對于科技的探索沒有停止,科研人員一直都在探索使用起來更為廣泛,更為方便的模型,同時也提出了很多全新的建模方法。
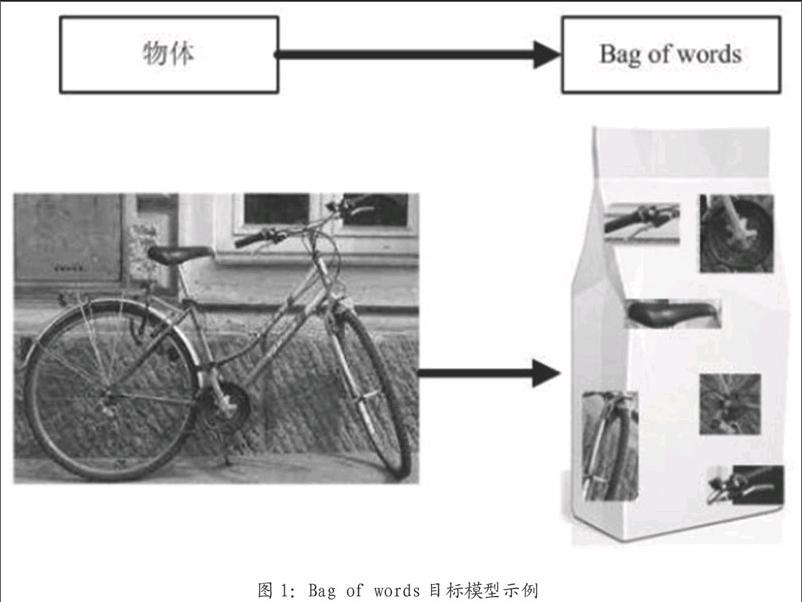
4.2 Bag of word模型
Bag of words模型最初是在model free模型上發展起來的,模型的主要基本思想是從圖像中提取出目標物體關鍵的部分,然后根據這些關鍵點的集合表示圖像的目標。Bag of word 模型是一種表示文檔的方法,最初是運用在文獻的搜索領域上。大致的思想是講一個文檔看做是一個一個詞匯的集合,不去考慮文獻中各種詞匯的結合順序以及語法,所以在檢索的過程中,所有的單詞都是獨立的,互不影響,也不會隨著語意的改變而改變。在Bag of word 后續的發展過程中,隨著數字圖像處理和計算機視覺技術的需要,研究者們也開始嘗試將該模型運用到圖像上,對圖像進行表征,但是圖像與文字的性質完全不同,圖像不僅僅是簡單的詞匯的結合,因此在將Bag of words 模型用于圖像的時候,可以不考慮圖像之間的復雜關系,只是將其看作是一系列的簡單視覺詞匯的結合。
4.3 Bag of word模型存在的問題及解決方法
Bag of words 模型雖然已經是一個很成熟的模型,在實際生活中,被許多的系統以及研究所使用,但是仍舊存在著各種不足之處。當前Bag of words 主要存在的問題是,在處理特征點的檢測過程中,通常會產生大數量處理的特征點,另一方面是在進行分類時,經常將目標在圖像中的背景包含進行,其中還包括不屬于目標的圖像或文檔,使Bag of words模型構成的詞袋在有些情況下是不合理的。所以在使用Bag of words模型的時候,為了避免類似的問題,可以采用SCPCD的方法抽取出整個短語,或者采用高階的統計語言模型,這樣可以在一定的條件下解決這種問題,對于那些詞序,句法以及語法均不能忽略的場合,不可以采用Bag of words模型。
5 結束語
本文主要陳述的是動態場景的視覺目標識別在生活和工作研究中的一些應用,以及在實際操作實行時遇到的一些問題以及解決方法。雖然國內對于動態場景的視覺目標識別的研究中取得了一定的進展和效果,但是仍舊伴隨著一些較為明顯的不足之處,仍舊需要科研工作者在未來時間內,在對這項技術的不斷實踐,不斷發掘,發現問題,對這項技術進行進一步的探索。希望在進一步的研究過程中,對于動態場景的視覺目標識別一定會取得質的飛躍。
參考文獻
[1]譚筠,安向京,賀漢根.基于優化的動態場景深度恢復[J].華中科技大學學報(自然科學版),2013(S1).
[2]劉華平,李建民,胡曉林,孫富春.動態場景下的交通標識檢測與識別研究進展[J].中國圖象圖形學報,2013(05).
[3]王斌,肖文華,張茂軍,熊志輝,劉煜.采用時空條件信息的動態場景運動目標檢測[J].計算機輔助設計與圖形學學報,2012(12).
[4]衡浩,熊惠霖.復雜動態場景下基于道路平面提取的行人檢測[J].計算機仿真,2013(09).
作者單位
山西輕工職業技術學院 山西省太原市 030013
猜你喜歡
中國水運(2017年1期)2017-02-27
中國水運(2016年11期)2017-01-04
中國水運(2016年11期)2017-01-04
科學與財富(2016年28期)2016-10-14
科學與財富(2016年28期)2016-10-14