一種基于改進BP神經網絡預測T/R組件溫度的方法
2016-12-21 10:42:59李碩
電子技術與軟件工程 2016年20期
李碩

摘 要 目前武器裝備故障預測與健康管理技術(PHM)在航空航天領域得到飛速發展,陸軍裝備應用PHM尚處于起步階段。本文針對有源相控陣雷達前端T/R組件對溫度有較高要求這一特性,建立基于動量因子和自適應學習率的BP神經網絡預測模型,利用傳統BIT系統采集的T/R組件溫度數據,在MATLAB平臺進行組件溫度預測仿真試驗,通過對比真實溫度值,驗證預測模型的可信度,進一步完善傳統雷達溫度監控功能,對預測組件故障起到一定參考作用。
【關鍵詞】BP神經網絡 T/R組件 溫度預測模型
T/R組件是構成有源相控陣雷達前端的關鍵部件。T/R組件的性能在很大程度上決定了有源相控陣雷達的性能。T/R組件通常由復雜的電子線路、電子元器件構成,對溫度有較高的要求,當組件溫度超出正常范圍,便會對各級功率放大器及各類電子元器件造成損傷,從而引起連鎖反應。
目前國內外在設計階段都已經對陣面進行有效冷卻設計,并能監測組件溫度。但往往受到散熱系統故障、組件自身故障等突發狀況,組件溫度發生異常,故障已經發生。而傳統組件溫度監測系統即使檢測到溫度超出警戒,但已錯失發現可能出現故障的時機,元器件已經受到損傷。因此,要完善現有的溫度檢測功能避免此類事件的發生;通過建立合適的模型,在溫度到達警戒值之前,利用歷史溫度數據,對T/R組件溫度進行預測,及時向雷達操作人員提供溫度預警,以便采取預防措施。
用于預測的方法多種多樣:
(1)時間序列預測,將歷史數據進行函數擬合,反映未來的某一時刻的預測值。
(2)數學模型預測:通過建立數學模型,建立輸入輸出映射關系,反映未來某一時刻的預測值。
(3)智能預測:基于歷史數據,利用人工智能方法進行預測。其中,BP神經網絡具有良好非線性擬合能力,并且可以對預測精度,誤差進行人為干預,在解決本文這類預測問題中有較好應用前景。
1 BP神經網絡
1.1 基本原理
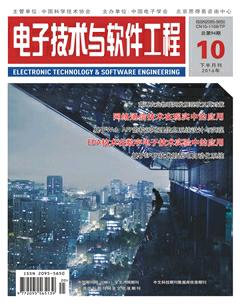
BP網絡結構如圖1所示。其中,xj表示輸入層第j個節點的輸入,j=1,2...M;ωi,j表示隱含層第i個節點到輸入層第j個節點之間的權值;θi表示隱含層第i個節點的閾值;Ф表示隱含層的激勵函數;ωk,i表示輸出層第k個節點到隱含層第i個節點之間的權值,i=1,2...q;αk表示輸出層第k個節點的閾值,k=1,2...L;Ψ表示輸出層的激勵函數;οk表示輸出層第k個節點的輸出。
1.2 基本算法
BP網絡通過學習過程對網絡的權值和閾值進行調整,達到對任一輸入都能得到期望輸出的目的。學習過程是由輸入信號的正向傳播和誤差信號的反向傳播組成的。正向傳播過程是指:輸入信號從輸入層傳給隱含層,經隱含層處理后傳給輸出層,再經輸出層處理后產生輸出信號。若正向傳播過程所得到的輸出值與期望的輸出值有誤差,則網絡轉為誤差反向傳播過程。誤差反向傳播過程是指:從輸出層開始將誤差信號逐層傳送到輸入層,并同時修改各層神經元的聯結權值和閾值,使誤差信號達到最小。重復上述過程 直至得到期望輸出值。基本BP神經網絡算法包括兩個方面:信號的正向傳播和誤差的反向傳播。
1.3 經典BP神經網絡的缺陷及改良
BP神經網絡算法的實質是求解誤差函數的最小值問題,由于它采用非線性規劃中最速下降方法,按誤差函數的負梯度方向修改權值,因而通常存在以下問題:學習效率低,收斂速度慢,易陷入局部極小狀態。
基于動量因子和自適應學習率的BP神經網絡:
在誤差反向傳播的基礎上,每一個權值(或閾值)的變化上加上一項正比于前次權值(或閾值)變化量的值,并根據反向傳播法來產生新的權值(或閾值)變化。
?ωij (k+1)=(1-mc)η+mc?ωij (k)
?ai (k+1)=(1-mc)η+mc?ai (k)
其中,η為學習速率,mc為動量因子,一般取0.95左右。根據附加動量法的設計原則,當新的權值導致誤差增長時,新的權值應被取消而不是采用,同時動量作用停止下來,以使網絡不進入較大誤差曲面;當新的誤差變換率超過設定的最大誤差變化率時,也應取消所計算的權值變化。其最大誤差變化率可以是任何大于或等于1的值。訓練程序中采用動量法的判斷條件為:
學習速率η決定每一次循環訓練所產生的權值變化量。大的學習速率可能導致系統的不穩定;小的學習速率會導致較長的訓練時間,可能收斂速度很慢。一般情況下,學習率初始值選取范圍為0.01至0.8。在實際訓練過程中,經常出現訓練在達到規定的總步長就已經停止,而誤差沒有下降到規定精度。因此,需要根據訓練誤差值調整學習率,調整依據為
2 仿真試驗
2.1 試驗方法
以某有源相控陣雷達為例,其共有80個組件,從雷達正常工作開始,每分鐘記錄一次組件的溫度。
通過反復測量可以得知,雷達工作30分鐘后組件溫度達到相對穩定狀態,從每分鐘溫升3℃、4℃降到每3、4分鐘溫升1℃或不變。預測方法為:用前3分鐘溫度值,預測1分鐘后的溫度值。例如要預測1分鐘后的溫度,選擇第0,1,2分鐘的溫度數據,目標為第3分鐘的溫度數據,通過搭建好的神經網絡預測模型進行訓練,當輸入第1,2,3分鐘的溫度數據,預測第4分鐘溫度,通過對比進行驗證。
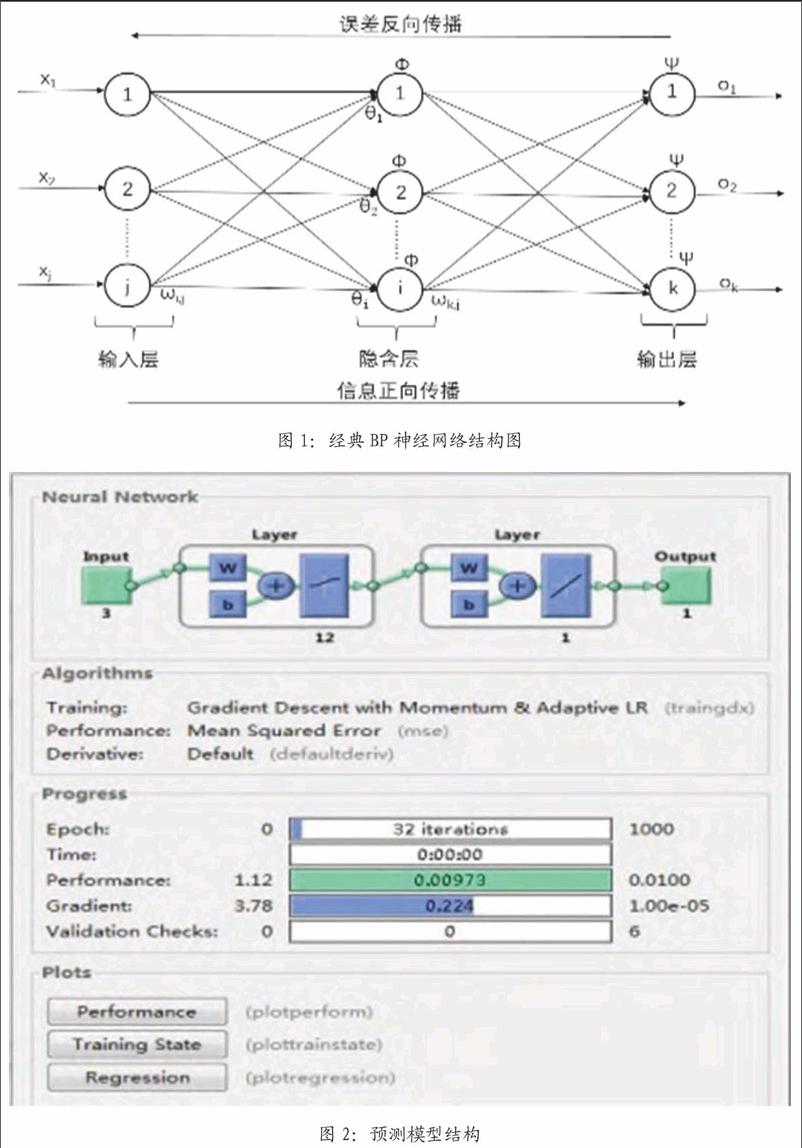
可根據實際情況選擇合適大小的輸入向量p(t1,t2,t3;t2,t3,t4;...),目標向量t(t4;t5;...),隱藏層數為1,隱含層節點數為經驗值12,傳輸函數選用logsig,purlin。訓練函數選用traingdx,學習函數選用learngdm。動量因子net.trainParam.mc選擇0.9,自適應學習率net.trainParam.lr_inc=1.05,net.trainParam.lr_dec=0.7。
2.2 仿真結果分析
2.2.1 預測1分鐘后溫度
選擇2號組件進行1分鐘后溫度預測,輸入向量為(34,34,36;34,36,40),目標向量(40,41),預測樣本(36,40,41),預測第5分鐘溫度。預測模型結構如圖2所示。
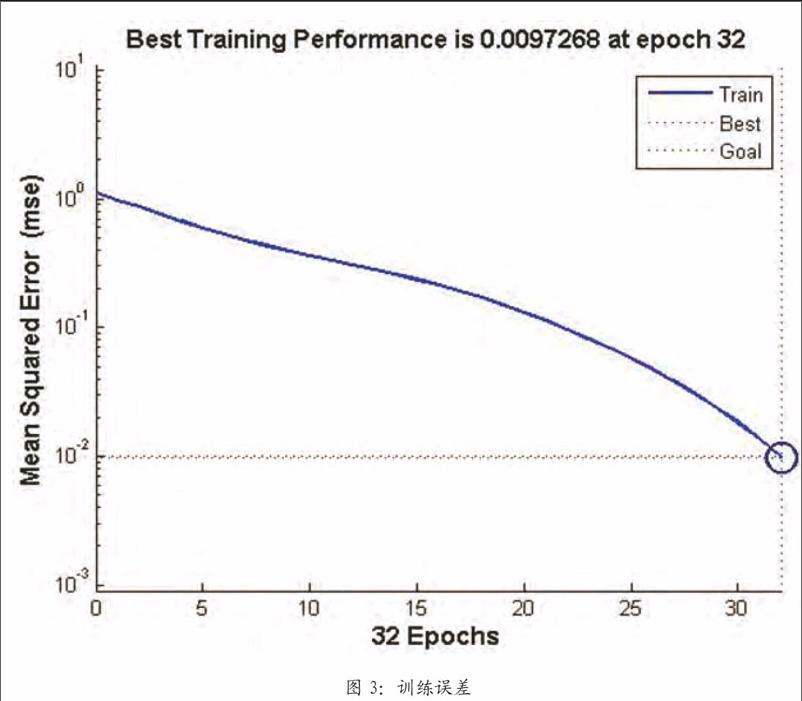
預測模型結構及訓練誤差曲線如圖3所示。
統計連續預測10次的誤差。由表1可以看出,預測溫度值與實際值的誤差基本保持在1℃左右。
以上預測出現誤差較大的情況,但發生的頻率不高。這種情況出現的原因之一是神經網絡初始權值的隨機性。雖然每次訓練網絡都達到相應精度,但每次訓練后網絡的各個隱含層權值、閾值都不完全一樣,因此在預測時,即使保持輸入樣本不變,但結果仍然會有變化。第二,當網絡初始值恰好隨機到某些數值時,訓練過程中,步數已經達到規定步數,但誤差值不跳出誤差表面的低谷,收斂速度過慢,使得訓練已經停止,而訓練誤差還很大;如果增加步數,訓練時間亦會增加。
3 結束語
基于動量因子的自適應學習速率BP神經網絡能夠完成T/R組件的溫度預測。若將每次開機后溫度都記錄下來,豐富訓練樣本,可進一步減少溫度預測的誤差。由于神經網絡具有很強的非線性映射擬合能力,能反映出組件實際工作狀態的發展趨勢與狀態信息之間的關系,因此,當預測程序發出預警,未來時刻組件的溫度發生異常,偏離了歷史溫度值或與相鄰組件溫度值有較大差異時,雷達操作員將做出相應的預防性維修措施,防止組件因溫度過高而受到損傷。
在雷達裝備應用PHM技術起步階段,此方法能夠應用到有源相控陣雷達前端的狀態預測,提高裝備的可靠性和維修性。同時也對其他設備的狀態監測及預測起到一定借鑒作用,具有良好的應用前景。
參考文獻
[1]郭衍瑩.相控陣雷達測試維修技術[M].北京:國防工業出版社,2013:172-174.
[2]周林, 趙杰.裝備故障預測與健康管理技術[M].北京:國防工業出版社,2015:168-170.
[3]劉冰,郭海霞.MATLAB神經網絡超級學習手冊[M].北京:人民郵電出版社,2014:160-164.
[4]陳明.MATLAB神經網絡原理與實例精解[M].北京:清華大學出版社,2013:156-160.
[5]肖治平,吳丈全.遺傳BP網絡在機載雷達故障診斷中的應用研究[J].計算機測量與控制,2011,19(01):14-25.
[6]陳明.MATLAB神經網絡原理與實例精解[M].北京:清華大學出版社,2013:156-160.
作者單位
西安電子工程研究所 陜西省西安市 710100