基于導航點改進Gauss偽譜法規劃滑翔導彈航跡
2016-12-22 00:57:02牛曉潔李邦杰舒健生潘樂飛楊奇松
彈道學報 2016年4期
牛曉潔,李邦杰,舒健生,潘樂飛,楊奇松
(火箭軍工程大學 初級指揮學院,西安 710025)
?
基于導航點改進Gauss偽譜法規劃滑翔導彈航跡
牛曉潔,李邦杰,舒健生,潘樂飛,楊奇松
(火箭軍工程大學 初級指揮學院,西安 710025)
為了研究滑翔導彈的航跡規劃問題,利用優化理論,規劃了多約束條件下導航點之間的航跡。基于導航點位置改進Gauss偽譜法(Gauss pseudospectral method,GPM),利用改進GPM離散控制變量和狀態變量,將最優控制問題轉化為非線性規劃問題,利用改進序列二次規劃算法求解。GPM求解分段航跡規劃問題,需要迭代獲取下段航跡的飛行時間,降低了算法效率。改進GPM能夠有效彌補單純以時間為自變量帶來的諸多規劃中的不足,具有更為寬泛的優化目標適應能力。算例結果表明,改進后的算法能夠準確、高效地規劃一條合理的航跡,滿足飛行約束條件。
滑翔導彈;航跡規劃;改進高斯偽譜法
助推-滑翔導彈是高科技戰爭中常實施的殺手锏之一,其航跡規劃問題作為關鍵技術之一值得研究[1]。早期的研究采用解析法求解軌跡優化問題,但由于在處理復雜的非線性系統時力不從心,學者們開始把研究焦點轉向數值方法,一般分為間接法和直接法[2]。近些年,直接法中的偽譜法由于其高精度、高效率,在軌跡優化方面得到了廣泛的應用[3]。高斯偽譜法[4]是2005年由麻省理工的Benson給出的一種新的求解最優控制問題的直接方法,并從理論上證明了高斯偽譜法與最優控制理論中的一階必要條件是一致的。GPM是將狀態變量和控制變量在一系列Gauss點上進行離散,最終可將最優控制問題轉化為受一系列代數約束的參數優化問題,即非線性規劃問題[5]。
許多文章都對GPM進行了研究,主要分為3大類:一是給定相應的指標泛函設計航跡,如文獻[6]以最大橫程為優化指標,利用高斯偽譜法求解了升力式飛行器的再入軌跡,文獻[7]基于高斯偽譜法以飛行時間為優化指標對滑翔彈道進行了優化設計;二是建立模型解決軌跡優化問題,如文獻[8]基于高斯偽譜法研究了助推-滑翔飛行器多階段軌跡優化問題,文獻[9]針對瞄準對抗問題建立了多階最優控制模型,基于GPM對飛機瞄準目標問題進行了研究;三是利用GPM對控制系統進行設計,如文獻[10]利用Gauss偽譜法對滑翔段到巡航段的過渡段控制率進行了設計。
GPM對時間變量進行歸一化處理,求解分段航跡規劃問題時,需要迭代獲取下段航跡的飛行時間,增加了計算量,降低了算法效率。提出了一種利用導航點位置改進GPM的新思路,以經度或者緯度為自變量進行歸一化處理。由于導航點位置可以提前確定,在求解分段航跡規劃問題時,避免了因為迭代時間導致的算法效率降低的問題。本文中以經度或者緯度為自變量的GPM方法,可以有效地彌補單純的以時間為自變量帶來的諸多規劃中的不便,具有更為寬泛的優化目標適應能力,以滿足諸如速度控制、能量管理等優化目標。文中以經度為例進行算法設計,并進行了仿真驗證。
1 滑翔段軌跡優化問題
1.1 無動力滑翔運動模型
考慮地球為旋轉圓球時,高超聲速飛行器無動力再入運動方程為[11]
(1)
式中:ω,r,v,γ,ψ,λ,B,γc,Fx,Fy分別為地球自轉角速度、地心距、速度、飛行路徑角、航向角、經度、緯度、傾側角、氣動升力和阻力。航跡角是速度向量與當地水平面的夾角,向上為正。航向角是速度向量在當地水平面投影與正北方向的夾角,順時針旋轉為正。
文中研究導航點之間的航跡規劃問題均在滑翔段完成,在北天東坐標系下確定導航點位置后,滑翔導彈飛行的縱向二維平面也就確定了。為了便于研究,該段航跡規劃時,假設忽略射面外的運動,僅以二維即只關注射面內的飛行參數,則規劃式的動力學模型與動力學模型都如下式所示:
(2)
式中:u,vr,Θ,h分別為切向速度、法向速度、速度傾角和高程。
1.2 約束條件
為保證飛行器在滑翔段飛行的穩定性,本文考慮了滑翔過程中的相關約束條件,包括控制量約束和彈道約束:熱流密度、動壓和過載等[12]。
1.2.1 控制約束
考慮導彈滑翔過程的實際情況,控制量應滿足一定約束,即
αmin≤α≤αmax
(3)
設定攻角的變化范圍為10°~20°,變化率不超過5(°)/s,基于三自由度模型,假定控制系統能夠保證導彈在豎直平面內滑翔飛行,文中取導航點之間導彈飛行的縱向二維平面與東天面的夾角為定值。
1.2.2 熱流約束
(4)

1.2.3 動壓約束
q=ρv2/2≤qmax
(5)
式中:ρ為大氣密度,文中取飛行器可承受的最大動壓qmax=60kPa。
1.2.4 過載約束
(6)
式中:CD,CL,S分別為氣動阻力系數、升力系數和氣動參考面積。左邊表達式為法向氣動過載,右邊為飛行器可以承受的最大過載,文中取nmax=4。
2 改進思路及模型
2.1 改進思路
GPM改進背景及思路:在滑翔導彈滑翔過程中,處于某一位置時相對于開始時刻的時間不能很好、快速地獲取,但所處位置的經緯度能夠通過計算得出,若是能對經緯度進行歸一化處理,將原有GPM中速度對時間求導的約束條件轉化為速度對經緯度求導的約束條件,將會簡化問題的復雜程度,提高計算效率。
2.2 經緯度歸一化模型
已知兩導航點經、緯度坐標,可以求得相對于北天東坐標系下兩導航點間的弧線段與Oxz平面之間的夾角σ,以及弧線段在經、緯度方向的跨度大小。根據跨度大小決定以緯度B或經度λ為基準進行歸算處理,即若經度λ方向跨度大就將經度λ歸算到τ。
(7)
2.2.1 經度歸一化
改進GPM將2個導航點之間對應的經度λ標準化為區間τ∈[-1,1]之間的量,因此對經度作如下變換:
(8)
可以看出經度λ與τ呈現一一對應的關系,并且單調遞增。
對應的高程變量有:
(9)
其他狀態變量同理可得。
2.2.2 高斯偽譜法配點選擇
綜合考慮航跡規劃問題,程序中采用K階Legendre多項式的根以及τ0=-1作為離散節點,Legendre多項式為
(10)
2.2.3 狀態變量和控制變量選擇
在航跡規劃時,選擇攻角作為控制量。由于K階Legendre多項式共有K+1個根,則作為控制量的攻角可表示為
α=(α1α2…αK+1)
(11)
狀態量在對應時域下的值為
(12)
2.2.4 拉格朗日插值函數
狀態變量為
(13)
2.2.5 構造等式約束
將式(7)與經狀態變量表達式求導后的函數式聯立,可得等式約束式為
(14)
2.2.6 目標函數
為了提高航跡規劃的效率,文中選擇最短滑翔時間作為性能指標泛函:
(15)
3 求解優化問題的算法流程
3.1 航跡規劃問題流程分析
首先利用改進GPM離散最優控制問題,利用二次規劃算法,求解近似原問題的二次規劃子問題來近似求解原問題。將典型二次規劃問題進行簡化分析,轉化為只含等式約束的最優控制問題,利用起作用約束集法調用拉格朗日算法,迭代更新起作用集和可行解,最終求得航跡規劃問題的最優解。具體流程圖如圖1所示。
3.2 C++環境下程序構架
在C++環境下編寫程序實現改進GPM離散最優控制問題,使用起作用集法求解二次規劃子問題。
①構造等式約束。
程序中以K階Legendre多項式的根為配點以及τ0=-1作為插值節點,利用拉格朗日插值函數求微分來近似式(7)運動模型中的左函數,之后與函數聯立,構造等式約束式。相對于狀態變量而言,每個節點對應3個等式約束,K+1個節點就對應3(K+1)個等式約束式。相對于控制變量而言,每個節點對應一個等式約束,所以二次規劃問題總共對應3(K+1)+K+1個等式約束。
利用高斯積分簡化目標函數,求解等式約束式以及目標函數的梯度。
②求取函數初值。
以往SQP法解二次規劃子問題時,首先需要求解線性規劃式,判斷給定的初始解是否可行,之后進行下一步的計算。這種方法對初值較為敏感,計算較為復雜。
文中在C環境下編寫程序時,只是給出了正定矩陣,利用拉格朗日函數求解下降方向向量,同時以此作為二次規劃子問題的初始可行解。與經典序列二次規劃算法相比,簡化了算法流程,通過仿真驗證了算法的高效性和合理性。
③二次規劃尋優。
首先根據等式約束,確定初始起作用集和非起作用集。使用拉格朗日法求解只含有起作用集約束的線性規劃問題,根據相關判定條件迭代更新起作用集和問題可行解,最終求出二次規劃子問題的最優解,也即是原先二次規劃問題的最優解。
4 算例分析
以遠程高超聲速滑翔式再入飛行器為仿真對象,氣動參數采用美國波音公司98年設計的CAV-H相關參數擬合得到[15],其最大升阻比為3.5;氣動參考面積為0.484m2;質量為907.2kg;最大飛行攻角和最大升阻比攻角分別為20°和10°;起始導航點經度、緯度、高程分別為29°,72°和60.37km;目標導航點經緯度坐標、高程分別為87°,74°和48.8km;滑翔開始時刻的速度為6 606m/s,最大飛行高度為70km,約束條件如1.2節所示。
取5階LG點以及τ0=-1作為插值節點,優化計算在CPU為3.4GHz/Corei3,操作系統為WindowsXP系統的微機上實現,VisualStudio2010環境下編寫程序,以時域變換為基礎的Gauss偽譜法求解上述算例需要0.078s,使用文中改進后的算法規劃航跡的時間為0.016s。兩者對比可知,后者在滿足飛行約束條件的基礎上大大縮短了航跡規劃所需的時間。
優化計算結果見圖2。圖2(a)中攻角變化曲線表明,滑翔導彈長時間保持最大升阻比攻角飛行,在起始導航點和目標導航點位置確定的情況下保證了最短飛行時間這一優化指標;圖2(b)中速度傾角始終為負值,說明滑翔導彈始終朝向目標點飛行,保證了最短飛行時間的優化指標;圖2(c)、圖2(d)中速度、飛行高度都能夠滿足終端約束條件限制;圖2(e)、圖2(f)、圖2(g)中過載、動壓和熱流密度的變化均在給定的變化范圍內,滿足飛行過程中的約束條件。仿真結果表明,在滿足相同約束條件的前提下,與以往相比,利用改進后的GPM能夠準確、高效地規劃出一條合理的航跡。
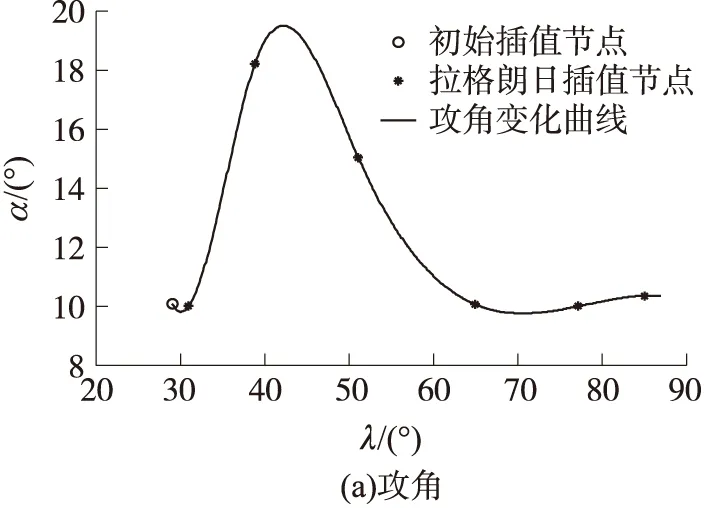
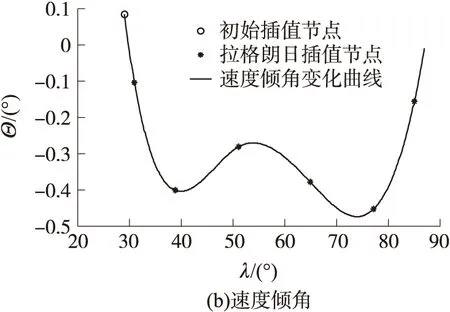
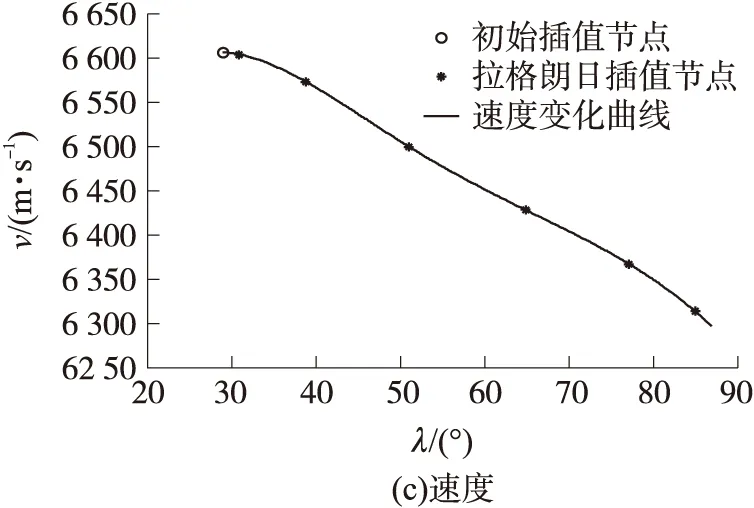
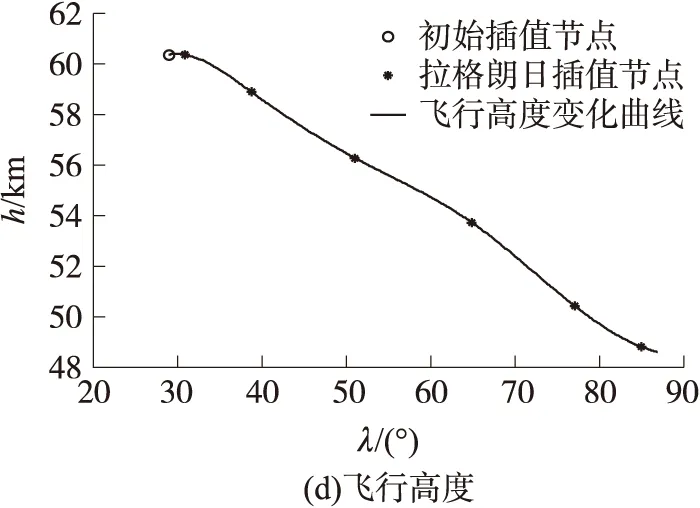
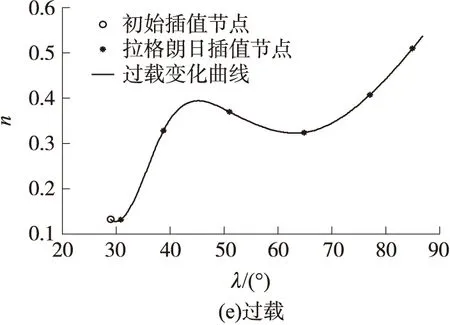
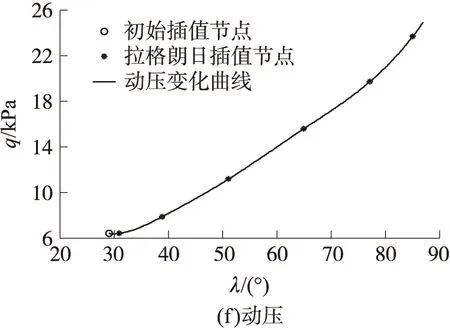
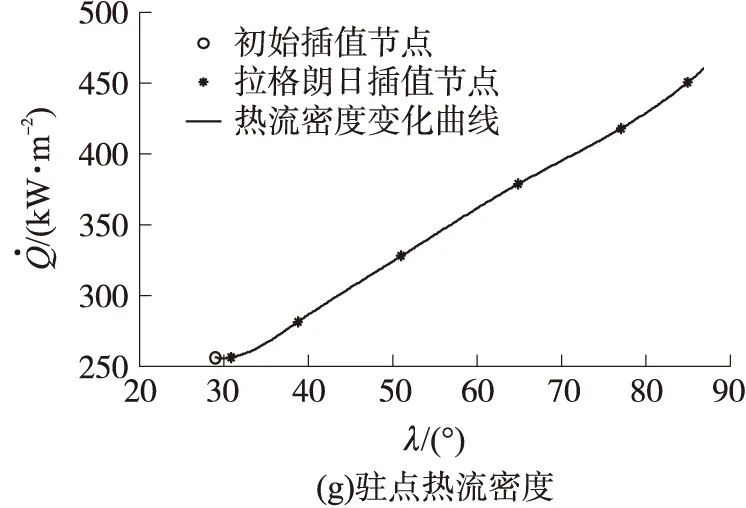
圖2 航跡規劃結果
5 結束語
文中基于導航點位置改進GPM,利用改進后的算法對滑翔導彈導航點之間的航跡進行了優化求解,并選取最短飛行時間作為優化指標,在滿足各種飛行約束的條件下,將攻角作為控制變量進行優化,得到了滑翔段導航點之間的最優航跡。從本文的研究中可以看出,文中改進后的算法與以往GPM相比,跳出了飛行時間的限制,在已知導航點位置后,滑翔導彈的縱向飛行平面也就隨之確定,簡化了運動模型,減少了計算量,縮短了求解航跡規劃問題所用的時間。文中的研究成果可為滑翔導彈在線航跡規劃提供一定的技術支撐,但文中改進算法是在地球為旋轉圓球的基礎上提出的,與實際不太相符,下一步將以地球橢球為背景設計研究相應的改進算法。
[1] 孟中杰,黃攀峰,閆杰.基于改進稀疏A*算法的高超聲速飛行器航跡規劃技術[J].西北工業大學學報,2010,28(2):182-186. MENG Zhong-jie,HUANG Pan-feng,YAN Jie.Exploring trajectory planning for hypersonic vehicle using improved sparse A* algorithm[J].Journal of Northwestern Polytechnical University,2010,28(2):182-186.(in Chinese)
[2]BETTS J T.Survey numerical methods for trajectory optimiza-tion[J].AIAA Journal of Guidance Control and Dynamics,1998,21(2):193-207.
[3]胡松啟,陳雨.偽譜法在飛行器軌跡優化中應用分析[J].火箭推進,2014,40(5):61-68. HU Song-qi,CHEN Yu.Analysis of pseudo-spectral methods applied to aircraft trajectory optimization[J].Journal of Rocket Propulsion,2014,40(5):61-68.(in Chinese)
[4]BENSON D A.A Gauss pseudospectral transcription for optimal control[D].Massachusetts:Massachusetts Institute of Technology,2005.
[5]唐國金,羅亞中,雍恩米.航天器軌跡優化理論、方法及應用[M].北京:科學出版社,2011. TANG Guo-jin,LUO Ya-zhong,YONG En-mi.Theory,method and application of spacecraft trajectory optimization[M].Beijing:Science Press,2011.(in Chinese)
[6]周文雅,楊滌,李順利.利用高斯偽譜法求解具有最大橫程的再入軌跡[J].系統工程與電子技術,2010,32(5):1 038-1 042. ZHOU Wen-ya,YANG Di,LI Shun-li.Solution of reentry trajectory with maximum cross range by using Gauss pseudospectral method[J].Systems Engineering and Electronics,2010,32(5):1 038-1 042.(in Chinese)
[7]李鐵鵬,王中原,陳琦,等.基于高斯偽譜法的滑翔彈道優化算法研究[J].彈箭與制導學報,2014,34(2):113-116. LI Tie-peng,WANG Zhong-yuan,CHEN Qi,et al.Study of gliding trajectory optimization algorithm based on Gauss pseudospectral method[J].Journal of Projectiles,Rockets,Missiles and Guidance,2014,34(2):113-116.(in Chinese)
[8]GUAN Cheng-qi,CHEN Cong.Multiphase path-constrained trajectory optimization for the boost-glide vehicle via the Gauss pseudospectral method[J].Journal of Astronautics,2010,31(11):2 512-2 518.
[9]程建鋒,董新民,薛建平,等.基于Gauss偽譜法的飛機最優目標瞄準控制[J].計算機應用,2013,33(11):3 291-3 295. CHENG Jian-feng,DONG Xin-min,XUE Jian-Ping,et al.Aircraft optimal target aiming control based on Gauss pseudospectral method[J].Journal of Computer Applications,2013,33(11):3 291-3 295.(in Chinese)
[10]汪立新,冷杉,王建華.基于Gauss偽譜法的導彈過渡段控制律設計[J].控制工程,2013,20(5):906-909. WANG Li-xin,LENG Shan,WANG Jian-hua.Design of control law of transition zone of missile based on Gauss pseudospectral method[J].Control Engineering of China,2013,20(5):906-909.(in Chinese)
[11]BOLLINO K P,ROSS I M.A pseudospectral feedback method for real-time optimal guidance of reentry vehicles[C]//Proceedings of the American Control Conference.New York:American Control Conference,2007:3 861-3 867.
[12]馮林爽,劉磊,王永驥.基于PSO和SQP混合優化算法的高超聲速飛行器軌跡優化[C]//2015 IEEE Chinese Control and Decision Conference.Qingdao:IEEE,2015:4 518-4 522. FENG Lin-shuang,LIU Lei,WANG Yong-ji.Trajectories optimization of hypersonic vehicle based on a hybrid optimization algorithm of PSO and SQP[C]//2015 IEEE Chinese Control and Decision Conference.Qingdao:IEEE,2015:4 518-4 522.(in Chinese)
[13]張科南,周浩,陳萬春.高超聲速飛行器多約束多種機動突防模式彈道規劃[J].彈道學報,2012,24(3):85-90. ZHANG Ke-nan,ZHOU Hao,CHEN Wan-chun.Trajectory planning for hypersonic vehicle with multiple constraints and multiple maneuvering penetration strategies[J].Journal of Ballistics,2012,24(3):85-90.(in Chinese)
[14]劉建業,曾慶化,趙偉,等.導航系統理論與應用[M].西安:西北工業大學出版社,2010. LIU Jian-ye,ZENG Qing-hua,ZHAO Wei,et al.Navigation system theory and application[M].Xi’an:Northwestern Polytechnic University Press,2010.(in Chinese)
[14]DARBY C L,HAGER W W,RAO A V.An hp-adaptive pseudospectral method for solving optimal control problems[J].Optimal Control Applications and Methods,2011,32(4):476-502.
Trajectory Planning for Gliding Missile Via Improved Gauss Pseudospectral Method Based on Navigation Points
NIU Xiao-jie,LI Bang-jie,SHU Jian-sheng,PAN Le-fei,YANG Qi-song
(Primary Command College,Rocket Force University,Xi’an 710025,China)
In order to study the trajectory planning problem of glide missile,the trajectory of the navigation points under the multi-constraint conditions was planned by using optimization theory.The improved Gauss pseudospectral method(GPM)was based on navigation points.The control variables and state variables were discretized by improved GPM,and the optimal control problem was converted into a nonlinear programming problem,and the problem was solved by using the improved sequential quadratic programming(SQP)method.When the segment path is planned by GPM,the flight time of the next trajectory is obtained via iterative method,and the efficiency of the algorithm is reduced.The improved GPM can effectively compensate the lack of time being taken as the independent variable in many trajectory planning,and it has a wider adaptability to optimize the target.The results show that the improved algorithm can accurately and efficiently plan a reasonable trajectory to meet the flight constraints.
glide missile;trajectory planning;improved Gauss pseudospectral method(GPM)
2016-06-30
牛曉潔(1992- ),男,碩士研究生,研究方向為飛行器總體、結構分析與飛行力學。E-mail:18706766973@163.com。
V412.4
A
1004-499X(2016)04-0036-06
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
