GNSS輔助捷聯慣導行進間對準自適應濾波方法
2016-12-23 01:44:38穆榮軍趙楊楊米長偉崔乃剛
中國慣性技術學報 2016年5期
關鍵詞:卡爾曼濾波
劉 斌,穆榮軍,趙楊楊,米長偉,崔乃剛
(1. 哈爾濱工業大學 航天學院,哈爾濱 150001;2. 中國兵器工業集團 國營第624廠,哈爾濱 150001)
GNSS輔助捷聯慣導行進間對準自適應濾波方法
劉 斌1,穆榮軍1,趙楊楊2,米長偉2,崔乃剛1
(1. 哈爾濱工業大學 航天學院,哈爾濱 150001;2. 中國兵器工業集團 國營第624廠,哈爾濱 150001)
針對車載武器系統快速發射需求,提出一種基于GNSS輔助的捷聯慣導行進間對準自適應濾波方法。該方法把行進間傳遞對準分為粗對準與精對準兩個階段。粗對準階段以GNSS為觀測基準完成對捷聯慣導姿態的粗捕獲,降低初始偏差不確定性對于精對準階段的影響。在精對準階段,考慮到車載系統的運動特性,提出一種“水平+方位”行進間對準雙濾波器并行的設計思路,利用車載系統在不同時間段的動力學特性,對三軸姿態估計進行分時解耦,實現初始姿態的高精度估計;與此同時,引入協方差成形自適應調節過程,以最小化 Frobenius范數為優化指標,實現對行進間對準卡爾曼濾波器的自適應調節,增強系統魯棒性。數值仿真表明,協方差成形自適應卡爾曼濾波方法能夠有效保證系統在全運動剖面內的穩定,結合雙濾波器并行方案能夠有效解決行進間對準精度不高與穩定性欠佳等問題,水平對準精度優于 1.5′ (1σ),方位對準精度優于 6′ (1σ)。
行進間對準;協方差成形;自適應濾波;Frobenius范數;分時解耦
大部分車載系統均配備有衛星導航系統,車載武器慣性導航系統能夠利用衛星導航提供的定位與測速信息,在運動條件下,完成對捷聯慣性導航系統的初始對準,即行進間對準。采用行進間對準方式能夠有效減少武器系統發射前的陣地準備時間,提高武器系統反應速度與作戰效能。但當前行進間對準的精度與可靠性還較為有限,研究高精度與高可靠的行進間傳遞對準方法具有較強的工程實用價值[6,8,11]。
卡爾曼濾波方法廣泛應用于組合導航系統中,卡爾曼濾波的估計精度取決于系統模型精度和噪聲統計特性的先驗信息[1]。對于GNSS輔助捷聯慣導行進間對準系統而言,捷聯慣導系統具有固定的誤差傳播特性,其誤差狀態向量間是交叉耦合的,各狀態向量間的交叉耦合強度決定了其可觀測程度,從而直接影響對準精度[2]。衛星導航系統僅能提供有效的位置與速度觀測信息,方位姿態、加速度計零偏與速度偏差的交叉耦合強度較弱,利用傳統衛星輔助方式很難對其進行有效估計[1-3]。分段線性系統可觀測性分析理論可以為增強行進間傳遞對準系統的可觀測性提供依據,例如在運動過程中,增加轉彎或者加減速機動等[4-5,7]。對于衛星導航動態定位而言,由于存在鎖相環濾波回路以及不同仰角衛星導航信號的性噪比差異,無法保證導航數據的高斯統計特性,采用標準卡爾曼濾波方法很難滿足行進間對準系統的最優估計。為了提高狀態向量的估計精度,基于殘差分析的自適應卡爾曼濾波方法被提出[10,12],它通過實際測量殘差的統計特性與建模殘差統計特性的比較來動態調節濾波增益,從而達到動態調節濾波器的目的,提高濾波器對于動態環境的適應能力和濾波估計精度。
本文提出一種新的GNSS輔助兩階段行進間對準自適應濾波方法,該方法分為兩步:卡爾曼濾波粗對準與協方差成形自適應濾波精對準。在卡爾曼濾波粗對準階段,構建水平姿態粗對準卡爾曼濾波器與航跡角粗對準二階低通數字濾波器,完成對水平姿態偏差與航跡角的粗略估計,航跡角與方位角偏差通過后續的精對準過程予以修正。在協方差成形自適應濾波精對準階段,采用“水平+方位”雙濾波器并行方案,利用發射車不同時間段的動態特性,對慣性導航三軸姿態偏差進行分時解耦。與此同時,通過實時估計過程噪聲與測量噪聲水平實現對濾波器的自適應調節。自適應濾波器的誤差協方差被分為兩部分:固定部分與以最小化Frobenius范數為優化目標的自適應調節部分。自適應濾波器通過動態補償噪聲方差實現對過程噪聲、測量噪聲與系統動態特性的自適應調節,從而保證濾波估計精度與魯棒性。仿真結果表明:行進間對準自適應濾波方法能夠實現高精度對準,水平對準精度優于 1.5′(1σ),方位對準精度優于 6′(1σ),且能有效抑制外界擾動對系統穩定性影響,實現濾波器在整個運動剖面內的一致收斂穩定。
1 行進間對準過程
GNSS輔助慣導行進間對準主要包括兩個階段:1)粗對準階段;2)協方差成形自適應卡爾曼濾波精對準階段。基本流程如圖1所示。
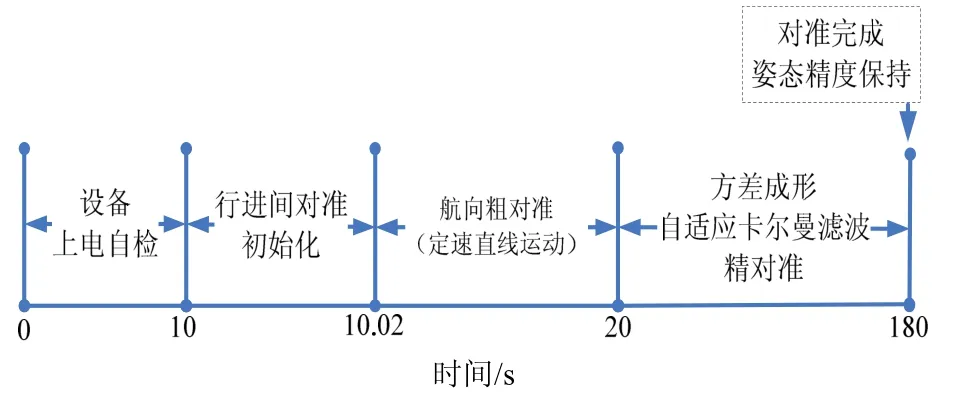
圖1 行進間對準時序流程圖Fig.1 Sequence of the in-motion rapid alignment
粗對準階段:利用衛星導航提供的測速信息,基于慣導誤差傳播特性建立水平姿態濾波器狀態模型,利用速度匹配方式,完成對水平姿態失準角的觀測,在短時間內完成粗水平對準;利用衛星導航數據,建立航跡角二階低通濾波器,通過位置測量信息,實現對航跡角估計阻尼,提高航跡角估計精度。
協方差成形自適應卡爾曼濾波精對準階段:以粗對準階段估計結果作為初始參數,減少濾波器收斂時間,提高系統對初始參數的魯棒性;把卡爾曼濾波器狀態誤差協方差分為固定部分和可變部分,可變部分以最小化 Frobenius范數為優化指標通過實時計算獲得,從而實現濾波器對于殘差方差的自適應調節,進而提高濾波器精度。
2 行進間粗對準
在車載系統直線平穩運動過程中,方位姿態偏差角的可觀測度很弱,無法獲取準確的方位姿態估計結果,而航跡角可從衛星導航提供的運動軌跡參數中濾波提取得到,航跡角與方位角一般偏差較小,在粗對準階段可用航跡角代替方位角。行進間粗對準分為兩部分:水平姿態估計卡爾曼濾波器和航跡角估計二階低通數字濾波器。
2.1 水平粗對準
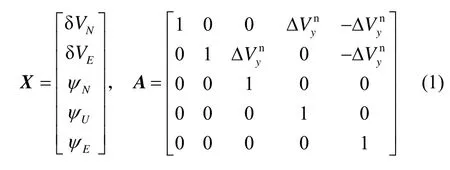
在水平姿態粗對準階段,僅需要提供數十角分的對準精度即可。從兼顧對準精度與算法復雜度的角度出發,以慣性導航誤差傳播模型為基礎,采用5維狀態模型與2維觀測模型,系統模型如下:

2.2 方位粗對準
方位角由航跡角近似得到。在直線運動過程中,航跡角可以直接通過GNSS速度輸出計算得到。為改善系統對于測量噪聲的抑制能力,采用二階低通數字濾波器對航跡角輸出進行濾波,并利用GNSS位置輸出對其進行阻尼,系統模型如下:

利用位置進行航跡角計算的方法主要有向量法與球面三角形法,本文采用向量法。由GNSS測量得到航跡上兩點對應的地心矢量分別為

則根據向量叉乘公式,可以得到tk時刻位置對應的子午圈切線單位矢量為


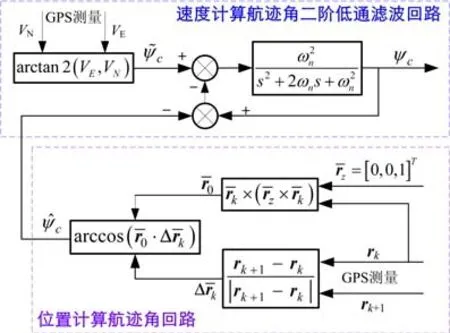
圖2 行進間粗對準航跡角數字濾波器結構Fig.2 Digital filter structure of coarse in-motion rapid alignment for course angle
航跡角二階低通濾波器結構見圖2。
3 行進間精對準
卡爾曼濾波器為實現快速收斂需要設定較大的濾波初始方差,而過大的初始方差會導致濾波器快速退化從而增大系統估計誤差。在衛星動態定位中,由于衛星星座切換和不同仰角衛星信號的性噪比差異,導致衛星接收機輸出為有色噪聲,采用卡爾曼濾波方法很難實現最優估計。與此同時,在行進間對準過程中,方位估計通道的可觀測度遠小于水平估計通道,且三軸姿態耦合,在僅利用速度間接觀測條件下無法實現同時估計。為解決該問題,采用“水平+方位”雙濾波器并行方案,利用車載系統不同時刻的動態特性進行系統分時解耦,并采用協方差成形方法動態調節各通道間濾波增益,實現濾波器的優化與穩定。行進間精對準系統結構見圖3。水平行進間精對準濾波器融合捷聯積分解算器Ⅰ與衛星導航數據進行水平姿態估計,并把水平姿態估計值反饋至捷聯積分解算器Ⅱ中,從而實現方位與水平姿態解耦;方位行進間精對準濾波器融合捷聯積分解算器Ⅱ與衛星導航數據進行方位精對準估計。
圖3 行進間精對準系統結構Fig.3 Structure of high-precision in-motion rapid alignment system
3.1 行進間精對準系統模型
GNSS能夠提供位置和速度觀測量,考慮到速度測量噪聲較大,采用位置進行適當阻尼能夠取得更好的估計效果,而加速度計偏差一般會被姿態偏差淹沒,很難實現準確估計。考慮系統模型精度與濾波器計算復雜度,以捷聯慣導誤差傳播特性為基礎,建立 10維誤差狀態傳播模型,即:

式中:X為狀態向量;A為離散化狀態轉移矩陣;I為單位矩陣;0為全零矩陣;ΔT為狀態更新周期;為捷聯姿態矩陣;δL、δλ分別為緯度與經度偏差;為陀螺儀零偏;RM為等效子午圈半徑;RN為等效卯酉圈半徑。
利用衛星導航實現觀測,觀測模型為
式中:LSINS、λSINS為捷聯解算地理緯度與經度;為GNSS測量地理緯度與經度。
3.2 協方差成形自適應卡爾曼濾波
捷聯慣導誤差傳播特性可以采用如下離散線性系統方程進行表示:

系統殘差ek為

系統測量殘差方差為

式中:Rk為測量噪聲方差;誤差協方差矩陣可以寫為

其中,α為自適應增益因子。
把式(11)代入式(10)中,有:

式中:

根據式(12)可知,可以通過調節自適應增益因子α,實現殘差協方差的優化。系統測量殘差協方差的均值可以通過N點采樣得到,即:

式(12)是卡爾曼濾波估計的殘差協方差矩陣,式(13)是實時測量計算得到的殘差協方差矩陣,因此以α為優化變量,可以得到使得式(12)與式(13)間偏差最小的代價函數,代價函數采用Frobenius范數表示,定義為:

把式(7)與式(12)代入式(14)中,有:

其中,

由于自適應增益矩陣α為對角矩陣,聯合式(16)與式(19),得到自適應增益矩陣α的計算公式為

其中,diag[·]表示取對角矩陣。
4 仿真及分析
4.1 仿真條件
衛星接收機和捷聯慣組性能指標見表1。
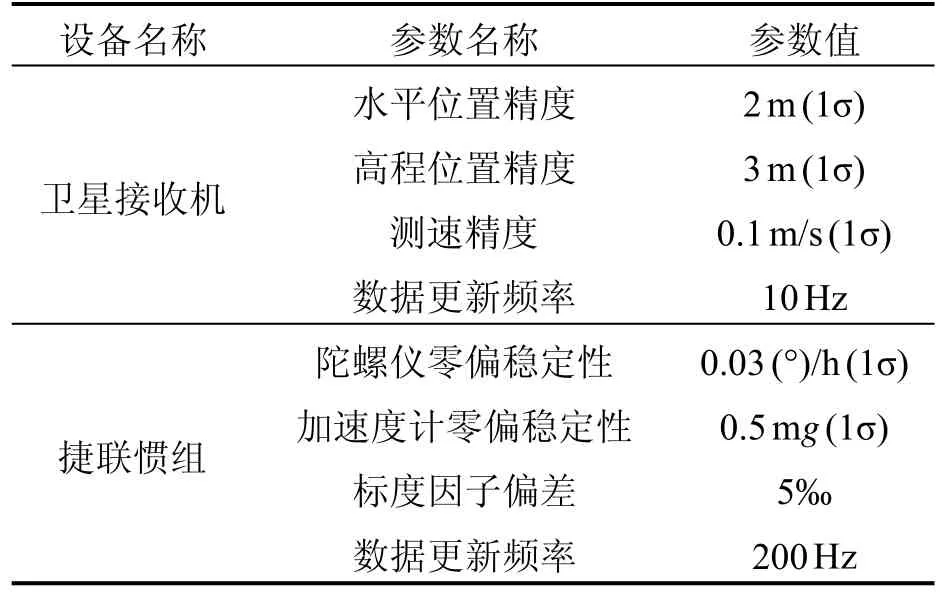
表1 衛星接收機和捷聯慣組性能指標Tab.1 Parameter of satellite receiver and strapdown inertial measurement unit
4.2 行進間粗對準數學仿真結果
針對不同車速開展行進間粗對準仿真,仿真結果如圖4和圖5所示。
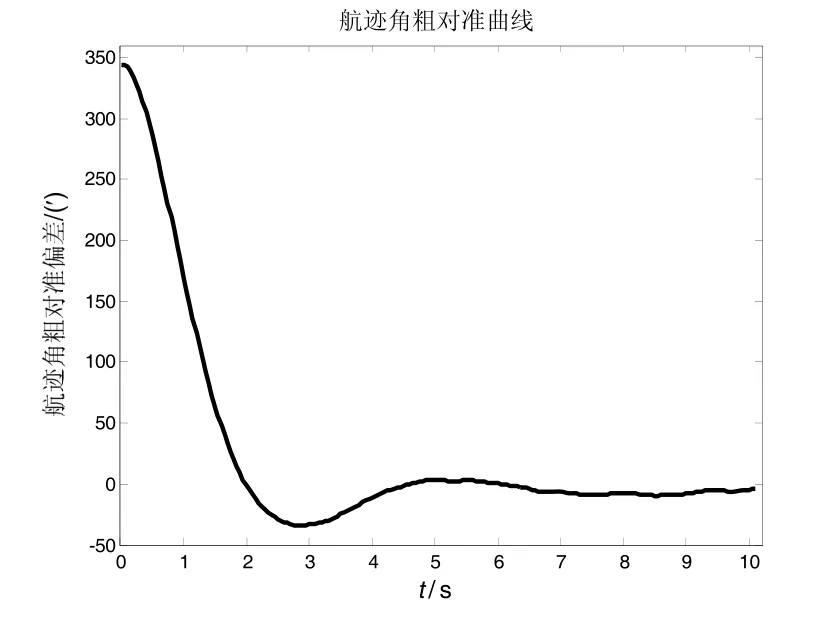
圖4 航跡角粗對準曲線Fig.4 Coarse-alignment deviation of flight path angle

圖5 速度-航跡角粗對準精度曲線Fig.5 Coarse-alignment deviation of flight path angle vs. vehicle speed
由圖4和圖5可知,行進間粗對準航跡角數字濾波器能夠實現航跡角的快速估計,航跡角收斂時間在8 s以內;航跡角估計精度與車速基本呈現線性相關性,速度越快,航跡角估計精度越高。
4.3 行進間精對準數學仿真結果
發射車三維運動軌跡見圖6(95 s開始轉彎)。單次水平精對準仿真結果見圖7與圖8。
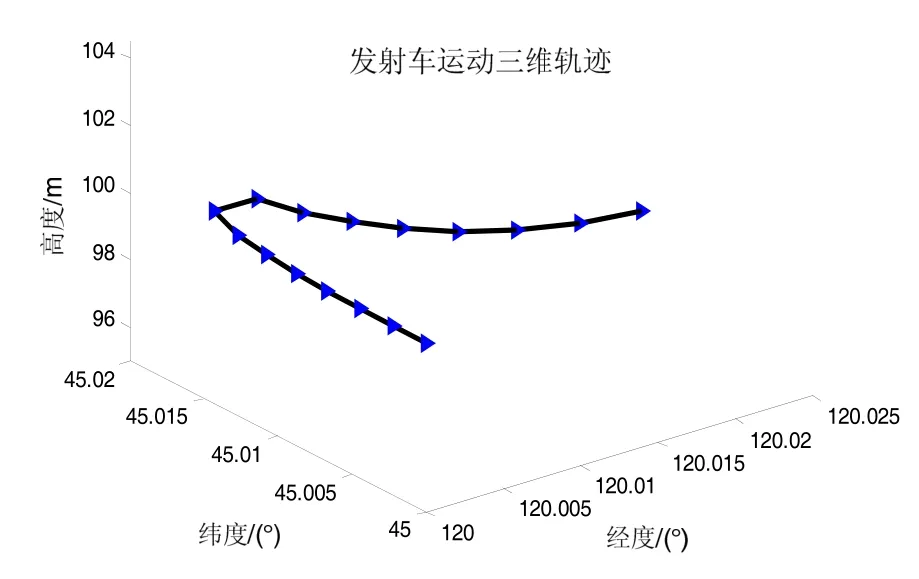
圖6 發射車三維運動軌跡Fig.6 3-D trajectory of vehicle
單次方位精對準仿真結果見圖9。
100次蒙特卡洛打靶統計精度見圖10。
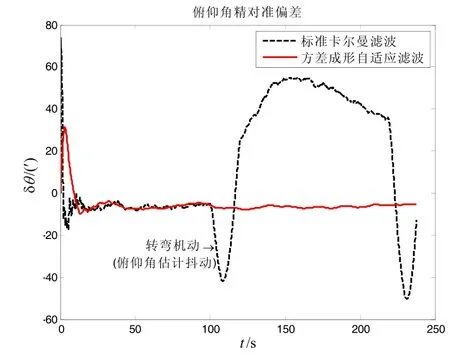
圖7 俯仰角精對準偏差曲線Fig.7 Precise-alignment deviation of pitch angle
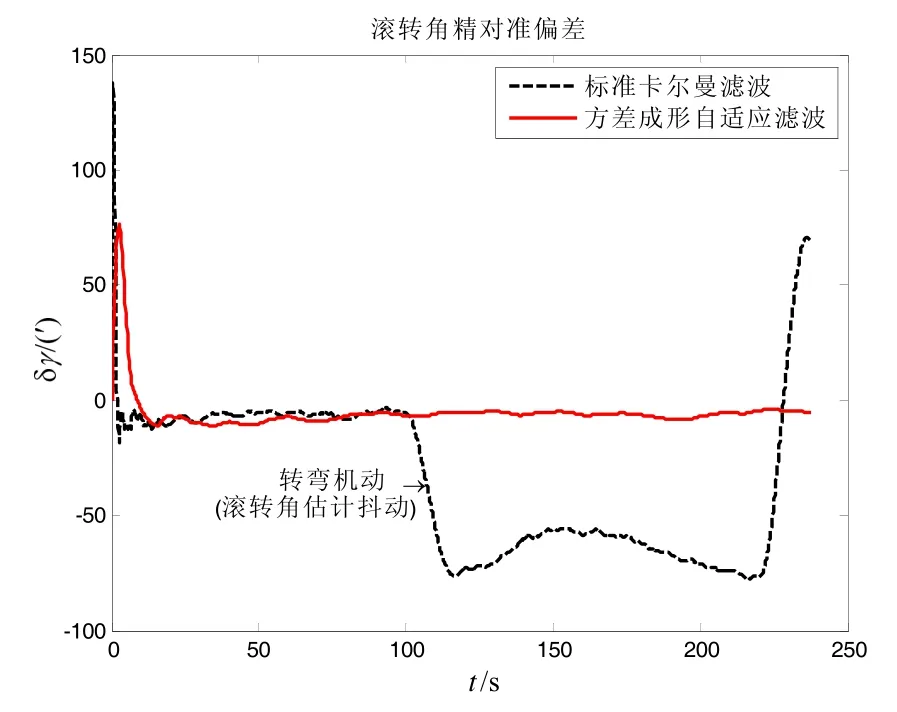
圖8 滾轉角精對準偏差曲線Fig.8 Precise-alignment deviation of roll angle

圖9 方位角精對準偏差曲線Fig.9 Precise-alignment deviation of azimuth angle
圖7與圖8中:在發射車轉彎機動時,卡爾曼濾波器水平姿態估計值出現抖動,但協方差成形自適應濾波器能夠有效抑制動態變化影響,保持濾波估計值穩定;方位角精對準濾波器在轉彎機動時快速收斂,方位角協方差自適應濾波器的穩定性與精度均優于卡爾曼濾波器,這表明:采用“水平+方位”雙濾波器并行方案能夠有效利用車載系統轉彎等外部激勵,實現水平姿態與方位姿態的分時解耦,完成三軸姿態對準;利用協方差成形自適應卡爾曼濾波方法能夠有效抑制擾動對濾波收斂性影響,保證系統在整個運動剖面內一致收斂穩定,實現高精度行進間對準。圖10行進間精對準蒙特卡洛打靶統計結果表明:協方差成形自適應濾波對準精度相較于傳統方法約提高了20%。

圖10 行進間精對準蒙特卡洛打靶結果Fig.10 Monte Carlo results of precise in-motion alignment
5 結 論
本文給出了一種具有較強魯棒性的GNSS輔助捷聯慣導行進間對準自適應濾波方法。
首先,以衛星導航為基準觀測信息,構建慣導水平姿態卡爾曼濾波器與航跡角二階低通數字濾波器,快速實現慣導初始基準粗捕獲,減小初始參數不確定性對于后續精對準過程的影響;
其次,考慮到方位與水平間的耦合特性,采用分時解耦策越,提出了一種“水平+方位”雙濾波器設計思路,利用導彈發射車在不同時段的機動特性,對三通道姿態耦合進行分時解耦,實現對慣導三軸姿態角的精確估計;
最后,引入協方差成形自適應濾波過程,以最小化Frobenius范數為優化指標,獲取得到系統殘差方差的自適應調節因子,以減小計算殘差方差與系統遞推殘差方差的不匹配度,實現卡爾曼濾波器的優化,增強系統魯棒性與精度。
計算機模擬仿真表明:采用該方法能夠實現較高精度的行進間對準,水平姿態對準在30 s內完成,方位姿態對準在捕獲到發射車轉彎機動后,30 s內完成收斂;水平對準精度優于 1.5′ (1σ),方位對準精度優于6′ (1σ),較傳統方法提高約20%;協方差成形自適應濾波方法能夠實現對擾動的抑制,保證在整個運動剖面內濾波器一致收斂穩定,為車載武器行進間對準系統開發提供參考與借鑒。
(References):
[1]Ali J, Ushaq M. A consistent and robust Kalman filter design for in-motion alignment of inertial navigation system[J]. Measurement, 2009, 42(4): 577-582.
[2]Chiang K W, Huang Y W, Niu X. Rapid and accurate INS alignment for land applications[J]. Survey Review, 2013.
[3]Sheng W, Han X, Sun D S. Rapid transfer alignment using integrated navigation system as reference[J]. Applied Mechanics and Materials, 2015, 713: 1156-1165.
[4]Li W, Tang K, Lu L. Optimization-based INS in-motion alignment approach for underwater vehicles[J]. Optik International Journal for Light and Electron Optics, 2013,124(20): 4581-4585.
[5]Pei F J, Liu X, Zhu L. In-flight alignment using H∞filter for strapdown INS on aircraft[J]. The Scientific World Journal, 2014.
[6]肖烜, 王清哲, 付夢印, 等. 里程計輔助陸用慣導行進間對準方法[J]. 中國慣性技術學報, 2012, 20(2):140-145.Xiao Xuan, Wang Qing-zhe, Fu Meng-Yin, et al. INS in-motion alignment for land-vehicle aided by odometer[J].Journal of Chinese Inertial Technology, 2012, 20(2):140-145.
[7]Li W, Wang J. Effective adaptive Kalman filter for MEMS-IMU/magnetometers integrated attitude and heading reference systems[J]. Journal of Navigation, 2013,66(01): 99-113.
[8] 練軍想, 吳文啟, 吳美平, 等. 車載SINS行進間初始對準方法[J]. 中國慣性技術學報, 2007, 15(2): 155-159.Lian Jun-xiang, Wu Wen-qi, Wu Mei-ping, et al. SINS initial alignment algorithm for marching vehicles[J]. Journal of Chinese Inertial Technology, 2007, 15(2): 155-159.
[9]Woonseon H, Kyungjun H, Chulsoo L, et al. Three stage in flight alignment with covariance shaping adaptive filter for the strapdown inertial navigation system (SDINS)[C]//AIAA Guidance, Navigation and Control Conference.Toronto, Ontario, Canada. 2010: 355-361.
[10]Hajiyev C, Soken H E. Robust adaptive Kalman filter for estimation of UAV dynamics in the presence of sensor/actuator faults[J]. Aerospace Science and Technology, 2013, 28(1): 376-383.
[11]劉義亭, 徐曉蘇, 張濤, 等. 基于外參考速度輔助的行進間羅經法對準[J]. 中國慣性技術學報, 2015, 23(2):165-171.Liu Yi-ting, Xu Xiao-su, Zhang Tao, et al. Compassing alignment in motion based on external reference velocity[J]. Journal of Chinese Inertial Technology, 2015, 23(2):165-171.
[12]Eldar Y C, Oppenheim A V. Covariance shaping leastsquares estimation[J]. IEEE Transactions on Signal Processing, 2003, 51(3): 686-697.
In-motion alignment adaptive filter method for GNSS-aided strap-down inertial navigation system
LIU Bin1, MU Rong-jun1, ZHAO Yang-yang2, MI Chang-wei2, CUI Nai-gang1
(1. School of Astronautics, Harbin Institute of Technology, Harbin 150001, China;2. State-owned Factory No. 624, China North Industries Group, Harbin 150001, China)
In view of the rapid-launch requirement for vehicle weapon system, an in-motion alignment adaptive filtering method for GNSS-aided strap-down inertial navigation system (SINS) is proposed. The in-motion transfer alignment is composed of two stage, i.e. coarse alignment and precise alignment. In the coarse alignment stage, the coarse acquisition of the SINS’s attitude is accomplished by taking GNSS as the observation datum, which can reduce the effect of initial deviation uncertainty on the precise alignment stage.In the precise alignment stage, the horizontal and azimuth filters work in parallel to improve the attitude estimation accuracy using three-axis attitude decoupling in the process of vehicle system movement.Meanwhile, the covariance shaping process is introduced by taking the minimum Frobenius norm as the optimization index to realize the self-adaptive in-motion alignment Kalman filter and improve the robustness of the system. Numerical simulation shows that the double-filter parallel scheme with covariance shaping adaptive Kalman filtering can effectively solve such problems as poor stability and low alignment accuracy,and the alignment accuracies are increased to 1.5′ (1σ, horizontal) and 6′ (1σ, azimuth).
in-motion alignment; covariance shaping; adaptive filtering; Frobenius norm; time division decoupling
V249. 322;U666. 11
A
1005-6734(2016)05-0577-06
10.13695/j.cnki.12-1222/o3.2016.05.004
2016-06-03;
2016-10-18
國家高技術研究發展計劃(863計劃)(2015AA7026083)
劉斌(1989—),男,博士研究生,主要從事慣性導航初始對準、組合導航研究。E-mail: xiaobin_hit@163.com
聯 系 人:崔乃剛(1965—),男,教授,博士生導師。E-mail: Cui_Naigang@163.com
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36