基于D-最優(yōu)的慣性平臺自標(biāo)定方案設(shè)計
2016-12-23 01:44:40汪立新秦偉偉
中國慣性技術(shù)學(xué)報 2016年5期
關(guān)鍵詞:模型
王 琪,汪立新,沈 強,秦偉偉
(火箭軍工程大學(xué),西安 710025)
基于D-最優(yōu)的慣性平臺自標(biāo)定方案設(shè)計
王 琪,汪立新,沈 強,秦偉偉
(火箭軍工程大學(xué),西安 710025)
慣性平臺自標(biāo)定的標(biāo)定方案設(shè)計目前多是依靠經(jīng)驗人為設(shè)計,而沒有比較系統(tǒng)的標(biāo)定方案設(shè)計方法,為解決此問題,提出了一種基于D-最優(yōu)理論的慣性平臺自標(biāo)定方案設(shè)計方法。首先分析給出了包含36個待估計參數(shù)的平臺系統(tǒng)誤差模型;然后以陀螺儀和加速度計的輸出模型為回歸模型,將慣性平臺自標(biāo)定看作一個廣義的多元回歸問題,以D-最優(yōu)理論為優(yōu)化準則,提出了并行設(shè)計和串行設(shè)計兩種標(biāo)定方案設(shè)計思路。將得到的優(yōu)化方案與傳統(tǒng)的十六位置標(biāo)定方案進行了仿真對比分析,仿真結(jié)果表明:優(yōu)化方案的陀螺儀誤差系數(shù)、加速度計誤差系數(shù)和加速度計安裝誤差系數(shù)標(biāo)定相對誤差都在1%以下,與傳統(tǒng)十六位置標(biāo)定方案的標(biāo)定精度相當(dāng);但優(yōu)化方案的陀螺儀安裝誤差標(biāo)定相對誤差在 5%左右,遠遠優(yōu)于傳統(tǒng)十六位置標(biāo)定方案 25%的相對誤差;而且優(yōu)化方案的標(biāo)定位置更少,能夠減少標(biāo)定時間,驗證了標(biāo)定方案設(shè)計思路的正確性。
D-最優(yōu);慣性平臺;自標(biāo)定;誤差模型;最優(yōu)位置
制導(dǎo)工具誤差和方法誤差是影響制導(dǎo)武器命中精度的主要因素,前者占主要成份,而慣性儀表的精度在很大程度上決定了慣性平臺系統(tǒng)的使用精度,因此在使用時必須進行補償。對于高精度慣性平臺,對誤差進行標(biāo)定并進行補償就顯得更為重要[1]。目前對于慣性平臺的誤差標(biāo)定和補償,主要方法是在地球重力場內(nèi)的多位置翻滾自標(biāo)定方法,將地球重力加速度和自轉(zhuǎn)角速度作為加速度計和陀螺儀的輸入,得到加速度計和陀螺儀的輸出,利用最小二乘法估計出平臺的誤差系數(shù)。在這個過程中,標(biāo)定位置的選擇將影響加速度計和陀螺儀的輸入大小,從而直接影響誤差標(biāo)定的精度[2]。因此標(biāo)定位置的選擇,即標(biāo)定方案的設(shè)計對于提高慣性平臺自標(biāo)定精度、減少標(biāo)定時間有著重要作用。但是目前對于標(biāo)定方案的設(shè)計,大多是依靠人為經(jīng)驗進行設(shè)計,并沒有比較系統(tǒng)的標(biāo)定方案設(shè)計方法,而慣性平臺自標(biāo)定實質(zhì)上是一個廣義的多元回歸問題,因此可以利用D-最優(yōu)理論對標(biāo)定方案進行設(shè)計[3]。
本文首先給出了慣性平臺中的坐標(biāo)系轉(zhuǎn)換關(guān)系和加速度計、陀螺儀的誤差模型,然后將加速度計和陀螺儀的誤差模型看作廣義多元回歸模型,利用 D-最優(yōu)理論進行標(biāo)定方案設(shè)計。針對慣性平臺自標(biāo)定中需要同時考慮加速度計和陀螺儀的輸出響應(yīng)的問題,給出了兩種標(biāo)定方案設(shè)計思路,并分別得到了兩個標(biāo)定方案。最后將得到的標(biāo)定方案與傳統(tǒng)的十六位置標(biāo)定方案進行了仿真對比分析,驗證了標(biāo)定方案設(shè)計思路的正確性。
1 平臺誤差模型
1.1 坐標(biāo)系定義及轉(zhuǎn)換矩陣
首先給出平臺中的坐標(biāo)系定義,假設(shè)平臺由三個單自由度積分陀螺儀與三個擺式加速度計組成,如圖1所示。

圖1 平臺組成圖Fig.1 Platform geometry
設(shè)陀螺儀i軸繞其o、s軸的安裝誤差為Δoi、Δsi,加速度計i軸繞其 p、o軸的安裝誤差為θpi、θoi,則平臺坐標(biāo)系p到X陀螺儀和X加速度計坐標(biāo)系的轉(zhuǎn)換矩陣分別為[4]

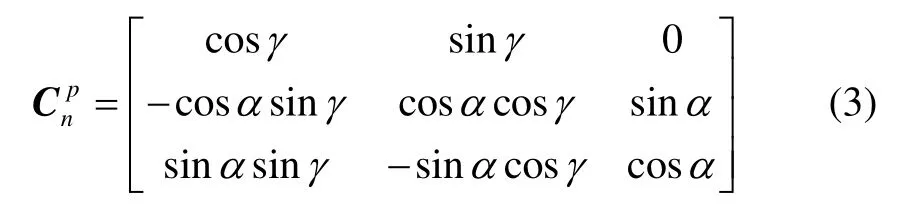
在慣性平臺自標(biāo)定試驗中,如果平臺先繞外環(huán)軸轉(zhuǎn)動角度γ,再繞臺體軸轉(zhuǎn)動角度α,則從地理坐標(biāo)系n(東北天坐標(biāo)系)到平臺坐標(biāo)系p的轉(zhuǎn)換矩陣為
1.2 陀螺儀和加速度計誤差模型
陀螺儀的靜態(tài)誤差模型為[5]

加速度計的靜態(tài)誤差模型為[4]

結(jié)合上文中的坐標(biāo)系轉(zhuǎn)換矩陣,將式(1)~(3)代入式(4)和(5),可得陀螺儀和加速度計的輸出模型分別為(以X陀螺儀和X加速度計為例)

因此,我們可將式(6)看作5維因素空間中的有8個待估計參數(shù)的廣義回歸模型,將式(7)看作3維因素空間中的有4個待估計參數(shù)的廣義回歸模型,以回歸試驗優(yōu)化的方法進行標(biāo)定方案設(shè)計。
2 D-最優(yōu)理論
最優(yōu)試驗設(shè)計是基于回歸模型的一類試驗設(shè)計方法,又稱回歸設(shè)計[7]。對于廣義回歸模型:

式中:tε為服從分布的相互獨立的隨機變量;為因素空間X中的一點,若因素空間為p維歐式空間,則xt就是p維向量 (是因素空間X中的小于或等于p元的連續(xù)函數(shù);為m個待估計參數(shù)。
假設(shè)試驗方案ε由N個試驗點x1,x2,… ,xN組成,那么廣義回歸模型(8)的結(jié)構(gòu)矩陣為[8]

其信息矩陣為

D-最優(yōu)理論認為,在同一模型(8)下,對兩個不同的試驗方案1ε和2ε,如果有,則在D-優(yōu)良性下方案1ε比2ε好[9]。本文將會依據(jù)該準則設(shè)計基于D-最優(yōu)的慣性平臺自標(biāo)定方案。
3 自標(biāo)定方案設(shè)計
在慣性平臺自標(biāo)定中,由于標(biāo)定的誤差系數(shù)較多,如果采用構(gòu)造 D-最優(yōu)設(shè)計的數(shù)值方法來進行方案設(shè)計,會產(chǎn)生計算量大、回歸方程最優(yōu)解不易求得等問題[10]。根據(jù)以往的經(jīng)驗可知,相鄰位置的α和γ之間一般間隔相同的角度(一般為45°或90°),因此可以采取一種遍歷尋優(yōu)的方法,只需要確定初始位置α1、γ1和相鄰位置的間隔角度Δα、Δγ,以D-最優(yōu)理論為設(shè)計準則,就可以通過遍歷搜索的方式得到最優(yōu)方案。
首先給出α和γ角的變化規(guī)律如表1所示。接下來就可以以表1所示的α和γ角的變化規(guī)律為基礎(chǔ),以陀螺儀和加速度計的輸出模型為回歸方程進行最優(yōu)標(biāo)定方案設(shè)計。
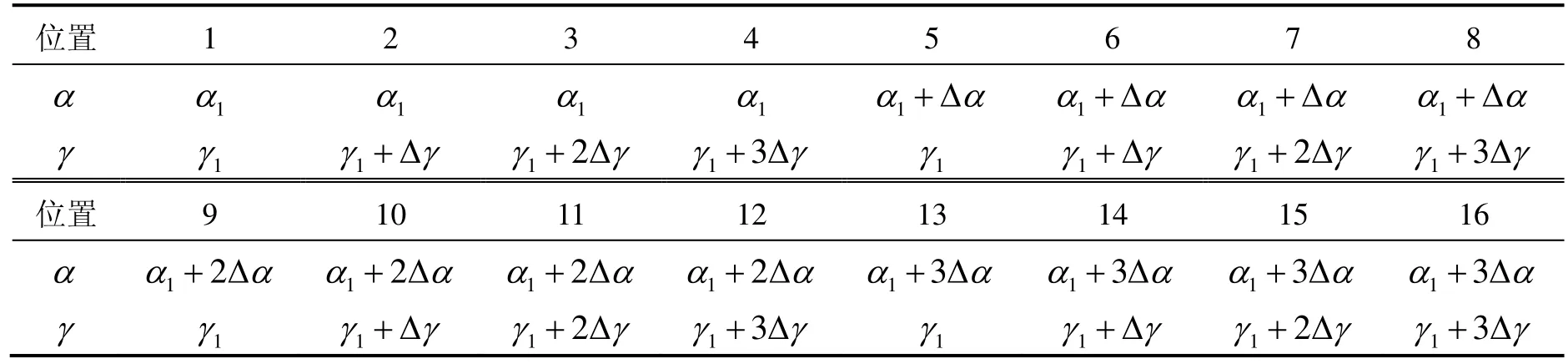
表1 α和γ角變化規(guī)律Tab.1 Changing characteristics ofαandγ
遍歷尋優(yōu)的算法流程如下:
1)設(shè)置1α和1γ的步長,本文選擇相等的步長5°,且1,1[0,180]α λ∈ 。
2)設(shè)置Δα和Δγ的值,依次取Δα=45°、90°,
3)設(shè)置標(biāo)定位置數(shù)N∈[m, 16],其中m為待估計參數(shù)個數(shù)。
4)求取每一個標(biāo)定位置數(shù)N下的最優(yōu)標(biāo)定方案。對于每一個Δα和Δγ的值,按照表1所示的變化規(guī)律,計算出180/5=36組標(biāo)定位置;由于Δα和Δγ的值有 4種組合方式,所以在一個標(biāo)定位置數(shù)N下有36× 4=144組標(biāo)定位置,根據(jù)式(9)和(10)求出每組標(biāo)定位置的信息矩陣行列式值,其中最大的標(biāo)定位置就是該標(biāo)定位置數(shù)N下的最優(yōu)標(biāo)定方案。
5)比較每個標(biāo)定位置數(shù)N下的最優(yōu)標(biāo)定方案得出最終的基于D-最優(yōu)的平臺N位置標(biāo)定方案。
慣性平臺自標(biāo)定不同于單表的測試,必須同時考慮陀螺儀和加速度計的輸出響應(yīng)。對于不同軸上的陀螺儀和加速度計而言,它們之間是初等變換矩陣的轉(zhuǎn)換關(guān)系,因此對于相同的標(biāo)定方案,不同軸上的陀螺儀和加速度計的信息矩陣行列式是相等的。所以在進行標(biāo)定方案設(shè)計時,只需要考慮一個軸上的陀螺儀和加速度計即可,得出的最優(yōu)標(biāo)定方案就是所有陀螺儀和加速度計的最優(yōu)標(biāo)定方案[11]。由此產(chǎn)生了兩種構(gòu)造最優(yōu)標(biāo)定方案的思路:第一種是同時設(shè)計陀螺儀和加速度計的標(biāo)定方案,然后對兩種方案進行組合,得到最終的平臺自標(biāo)定方案,稱之為并行方案設(shè)計;第二種是串行方案設(shè)計,即首先選擇對加速度計或陀螺儀中的一個進行標(biāo)定方案設(shè)計,然后以此方案為初始方案,以另一個的輸出模型為回歸方程進行方案優(yōu)化,得到最終的標(biāo)定方案。由于在D-最優(yōu)理論中要求初始方案的標(biāo)定位置數(shù)必須大于待估計參數(shù)個數(shù),所以本文選擇先對誤差系數(shù)個數(shù)較多的陀螺儀進行標(biāo)定方案設(shè)計,再在加速度計誤差模型的基礎(chǔ)上進行方案優(yōu)化。下面就兩種設(shè)計思路進行最優(yōu)方案設(shè)計。
3.1 并行方案設(shè)計
并行設(shè)計方案是對陀螺儀和加速度計同時進行最優(yōu)標(biāo)定方案設(shè)計,然后將兩個標(biāo)定方案進行組合得到最終的標(biāo)定方案。以加速度計為例,X加速度計的輸出模型為如公式(7)所示。
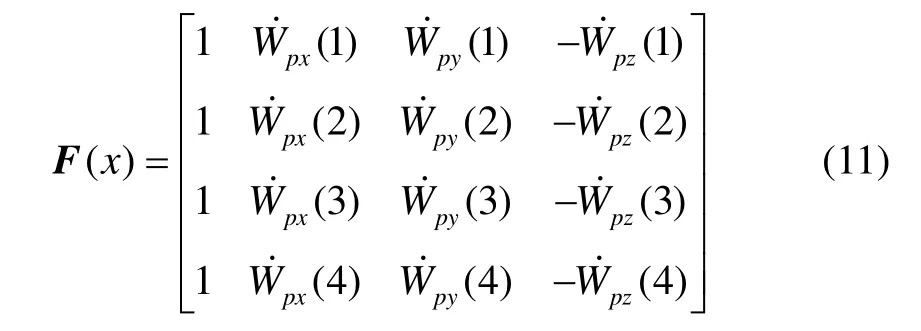
則其信息矩陣為

按照遍歷尋優(yōu)的算法流程比較信息矩陣行列式值的大小就可以得到對于加速度計的最優(yōu)標(biāo)定方案。不同標(biāo)定方案的部分信息矩陣行列式值變化如圖2所示。

圖2 信息矩陣行列式值變化圖Fig.2 Change of information matrix determinant
同理可以得到陀螺儀的最優(yōu)標(biāo)定方案如表3所示。
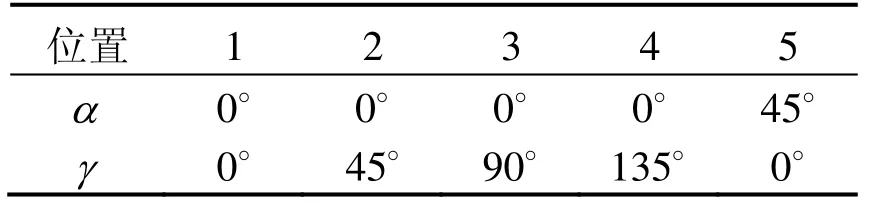
表2 加速度計最優(yōu)標(biāo)定方案Tab.2 Optimal calibration scheme of accelerometer
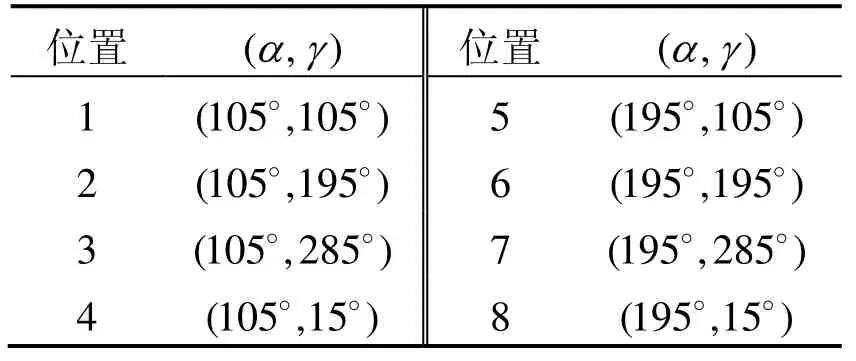
表3 陀螺儀最優(yōu)標(biāo)定方案Tab.3 Optimal calibration scheme of gyro
將兩個標(biāo)定方案組合就可以得到并行方案設(shè)計下的D-最優(yōu)平臺自標(biāo)定方案如表4所示。

表4 并行設(shè)計下的平臺標(biāo)定方案Tab.4 Optimal calibration scheme of platform
3.2 串行方案設(shè)計
串行方案設(shè)計是先進行陀螺儀最優(yōu)標(biāo)定方案的設(shè)計,然后以此方案為基礎(chǔ),以加速度計的輸出模型為回歸方程進行優(yōu)化,得到最終的平臺自標(biāo)定方案。
在第2節(jié)中已經(jīng)得到了陀螺儀的最優(yōu)標(biāo)定方案,在此基礎(chǔ)上進行方案優(yōu)化。此時以加速度計輸出模型為回歸方程可以得到信息矩陣行列式值變化如圖3所示。
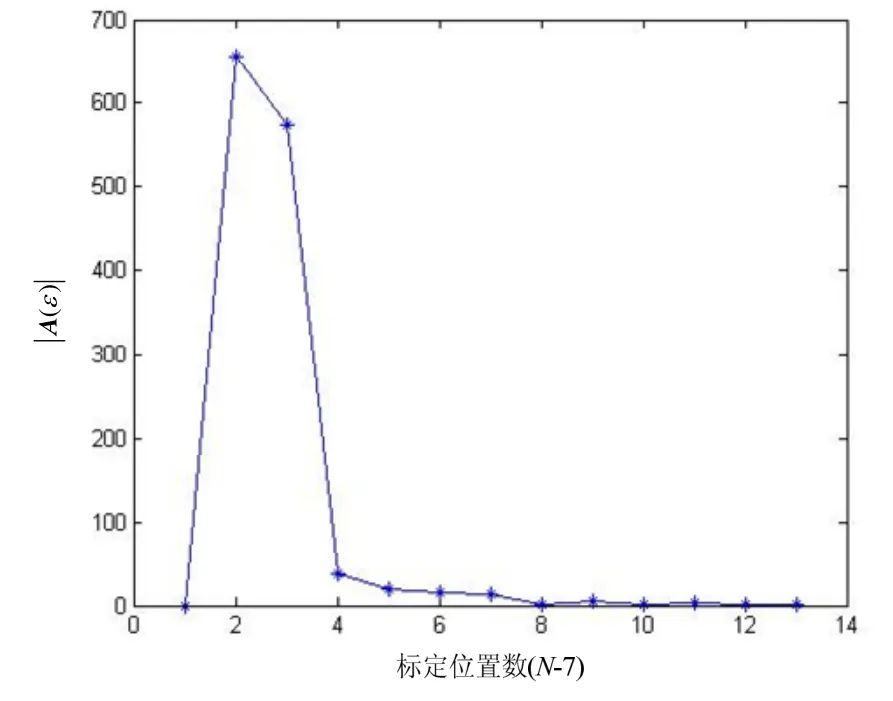
圖3 信息矩陣行列式值變化圖Fig.3 Change of information matrix determinant
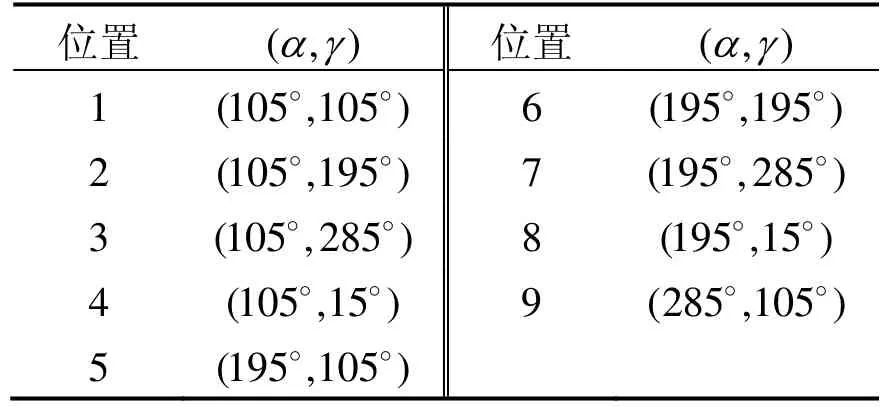
表5 串行設(shè)計下的平臺標(biāo)定方案Tab.5 Optimal calibration scheme of platform
從圖3可以看出,當(dāng)N-7=2,即N=9時信息矩陣行列式值為最大,所以串行方案設(shè)計下的平臺最優(yōu)標(biāo)定方案如表5所示。
4 仿真分析
為驗證提出的標(biāo)定方案設(shè)計思路的可行性,將得到的兩種標(biāo)定方案與文獻[4]中的十六位置標(biāo)定方案進行仿真對比。該十六位置標(biāo)定方案如表6所示。
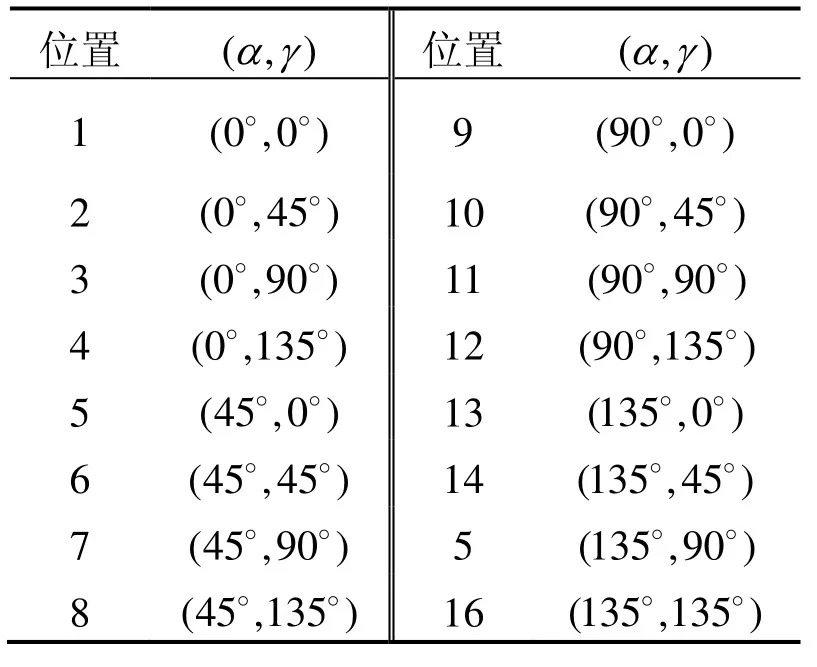
表6 十六位置模型Tab.6 Model of 16 position
首先給出仿真真值如表7第二欄所示。表7中:陀螺儀零次項系數(shù)單位為(°)/h,一次項系數(shù)單位為(°)/(h·g),二次項系數(shù)為(°)/(h·g2),安裝誤差單位為角秒(″);加速度計零次項誤差系數(shù)單位為 0.001 m/s2,一次項系數(shù)單位為0.001 m/(s2·g),安裝誤差單位為角秒(″);陀螺儀漂移隨機誤差標(biāo)準差為 0.001 (°)/h;加速度計測量隨機誤差標(biāo)準差為 1× 10-6m/s2。在標(biāo)定過程中,平臺框架軸安裝誤差認為是己知量,其仿真真值通過隨機抽樣產(chǎn)生,均值為10″,標(biāo)準差為1″。
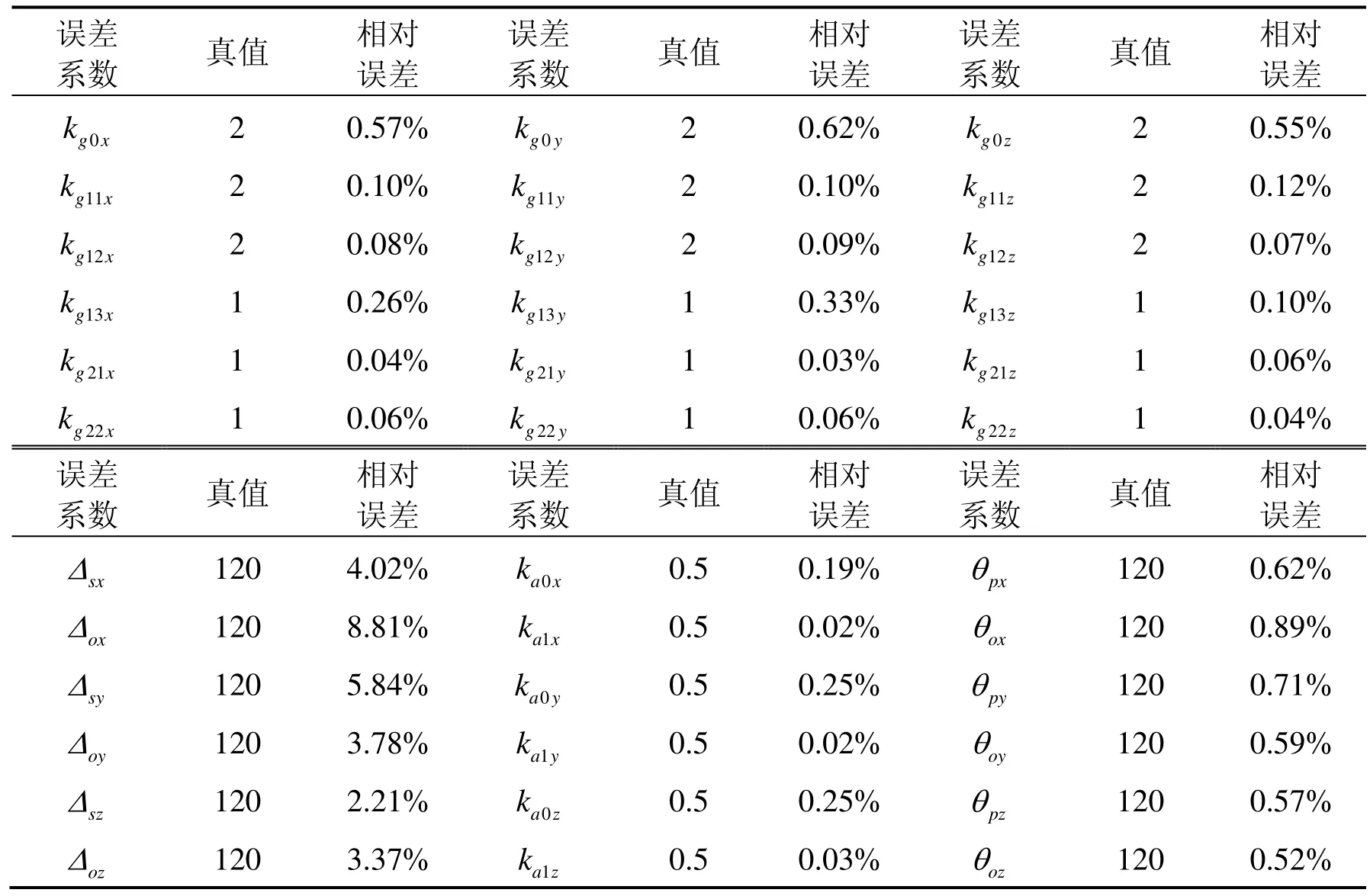
表7 仿真真值Tab.7 True values of simulation
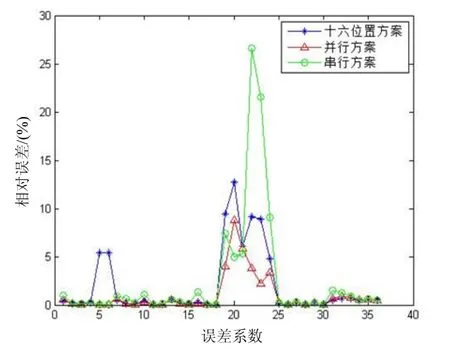
圖4 誤差系數(shù)標(biāo)定結(jié)果(注:圖中36個誤差系數(shù)依次與表7縱向相對應(yīng))Fig.4 Calibration results of three schemes
定義相對誤差為

三種方案的標(biāo)定結(jié)果如圖4所示,表7中第三欄給出了并行方案的標(biāo)定結(jié)果。從圖4中對比可以看出,并行方案的標(biāo)定精度明顯高于串行方案和十六位置方案,而且并行方案是13位置方案,能夠有效減少標(biāo)定時間。從表7的并行方案標(biāo)定結(jié)果可以看出,陀螺儀誤差系數(shù)估計相對誤差最大為 0.62%,加速度計誤差系數(shù)估計相對誤差最大為 0.25%,加速度計安裝誤差估計相對誤差最大為 0.89%,估計精度都比較高。只有陀螺儀安裝誤差估計精度稍低,最大相對誤差為8.81%,這是因為作為其激勵的地球自轉(zhuǎn)角速度比較小,無法充分激勵誤差,若要進一步激勵陀螺儀安裝誤差,需要對平臺施加加矩角速度。
5 結(jié) 論
本文首先給出了包含 36項誤差系數(shù)的較為完整的慣性平臺誤差模型,在此基礎(chǔ)上,針對慣性平臺自標(biāo)定需要同時考慮陀螺儀和加速度計的輸入響應(yīng)的問題,提出了兩種標(biāo)定方案設(shè)計思路:并行方案設(shè)計和串行方案設(shè)計。文中將慣性平臺自標(biāo)定看作一個廣義多元回歸問題,以D-最優(yōu)理論為設(shè)計原則,將陀螺儀和加速度計輸出模型看作廣義回歸方程,就兩種設(shè)計思路設(shè)計出了兩種標(biāo)定方案。最后通過仿真分析對比兩種標(biāo)定方案與傳統(tǒng)的十六位置標(biāo)定方案的誤差系數(shù)標(biāo)定結(jié)果,證明并行方案能夠以較少的標(biāo)定位置(13個標(biāo)定位置)達到比傳統(tǒng)十六位置更好的誤差系數(shù)估計精度,具有一定的可行性。
(References):
[1]Seong-hoon P W, Farid G. A triaxial accelerometer calibration method using a mathematical model[J]. IEEE Transactions on Instrumentation and Measurement, 2010,59(8): 2144-2152.
[2]包為民, 申功勛, 李華濱, 等. 慣性平臺在系統(tǒng)中多位置翻滾自標(biāo)定方法[J]. 北京航空航天大學(xué)學(xué)報, 2011,37(4): 462-465.Bao Wei-min, Shen Gong-xun, Li Hua-bin, et al. Investigation on inertial platform multi-position rolling selfcalibration[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(4): 462-465.
[3]Begot S, Voisin E, Hiebel P. D-optimal experimental design applied to a linear magnetostatic inverse problem[J]. IEEE Transactions on Magnetics, 2002, 38(2): 1065-1068.
[4]Kit Yan Chana, Nimali Rajakarunaa, Ulrich Engelkeb, et al. Alignment parameter calibration for IMU using the Taguchi method for image deblurring[J]. Measurement,2015, 65: 207-219.
[5]曹淵, 張士峰, 楊華波, 等. 慣導(dǎo)平臺誤差快速自標(biāo)定方法研究[J]. 宇航學(xué)報, 2011, 32(6): 1281-1287.Cao Yuan, Zhang Shi-feng, Yang Hua-bo, et al. Research on rapid self-calibration method for inertial platform[J].Journal of Astronautics, 2011, 32(6): 1281-1287.
[6]Cao Y, Cai H, Zhang S F, et al. A new continuous self-calibration scheme for a gimbaled inertial measurement unit[J]. Measurement Science and Technology, 2012,23(1): 385-394.
[7]Hajiyev C. Sensors calibration design based on D-optimal criterion[J]. Metrology and Measurement Systems, 2016,23(3): 413-424.
[8]Stuart H, Munson-McGee. D-optimal experimental designs for uniaxial expression[J]. Journal of Food Process Engineering, 2014, 37(3): 248-256.
[9]Ghasemain E, Motaghian P, Vatanara A. D-optimal design for preparation and optimization of fast dissolving Bosentan nanosuspension[J]. Adv Pharm Bull, 2016, 6(2): 211-218.
[10]Kincaid R K, Padula S L. D-optimal designs for sensor and actuator locations[J]. Computers & Operations Research,2002, 29(6): 701-713.
[11]孟衛(wèi)鋒, 袁愛紅, 賈天龍, 等. 高精度慣性平臺十六位置自標(biāo)定方案[J]. 中國慣性技術(shù)學(xué)報, 2015, 23(2):150-155.Meng Wei-feng, Yuan Ai-hong, Jia Tian-long, et al.16-position self-calibration of high-accuracy inertial platform[J]. Journal of Chinese Inertial Technology, 2015,23(2): 150-155.
Design of inertial platform self-calibration scheme based on D-optimal theory
WANG Qi, WANG Li-xin, SHEN Qiang, Qin Wei-wei
(Rocket Force University of Engineering, Xi’an 710025, China)
In view that there is usually no systemic design method for the self-calibration scheme of inertial platform, a design method based on D-optimal theory is proposed to solve such problem. An error model of inertial platform with 36 error coefficients is deduced and is used as multi-regression model in designing the calibration scheme, in which the inertial platform self-calibration is regarded as a generalized multiple regression problem. Two design ideas, i.e. parallel scheme and serial scheme, are proposed for the calibration scheme based on the D-optimal theory. Simulation comparisons are made between the obtained optimized scheme and the traditional 16-position calibration scheme, and the results show that the relative error of gyro-platform geometry by the optimized scheme is about 5%, which is much lower than that of the traditional 16-position calibration scheme, and the calibration precision of the optimized scheme is better than that of the traditional scheme. In addition, the calibration time is reduced because of fewer positions.The simulation results validate the applicability of the design idea based on D-optimal theory.
D-optimal; inertial platform; self-calibration; error model; optimal position
U666.1
A
1005-6734(2016)05-0583-06
10.13695/j.cnki.12-1222/o3.2016.05.005
2016-07-01;
2016-09-17
國家自然科學(xué)基金青年基金(61503390)
王琪(1991—),男,博士研究生,從事慣性系統(tǒng)及儀器研究。E-mail: wq050314@163.com
聯(lián) 系 人:汪立新(1966—),男,博士生導(dǎo)師,從事慣性系統(tǒng)及儀器研究。E-mail: wlxxian@sina.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19