CNC機床動態特性與S形試件輪廓誤差映射關系分析
2016-12-23 02:57:52宋智勇李晴朝康文俊
中國機械工程 2016年23期
宋智勇 李晴朝 姜 忠 康文俊 杜 麗 王 偉
1.電子科技大學,成都,6117312.成都飛機工業(集團)有限責任公司,成都,610092
?
CNC機床動態特性與S形試件輪廓誤差映射關系分析
宋智勇1,2李晴朝1姜 忠1康文俊1杜 麗1王 偉1
1.電子科技大學,成都,6117312.成都飛機工業(集團)有限責任公司,成都,610092
以雙擺頭五軸數控機床為研究對象建立了仿真模型,并對其準確性進行了實驗驗證。然后通過仿真分析揭示了S形試件輪廓誤差在試件各分區的表現規律。基于機床動態特性與S形試件輪廓誤差的映射關系,可以為實際加工中五軸數控機床動態性能參數的調整、機床性能評價及加工誤差的溯源和辨識提供指導依據。
五軸數控機床;動態特性;S形試件;映射關系
0 引言
現代數控機床正在向高精度、高速化方向不斷發展,對其性能、精度及效率等方面的要求也隨之不斷提高。數控機床的精度表現與機床設計、制造裝配、伺服驅動、數控系統、材料等都密切相關。而在數控機床的加工過程中,相比幾何精度、熱變形等造成的誤差,機床動態性能對機床加工精度的影響較為突出,占據機床全部加工誤差的主要部分[1]。
檢測機床動態性能的方法通常有兩種:①通過儀器檢測,主要包括球桿儀、激光干涉儀、圓光柵等[2],可以有效測量單軸的定位誤差、反向間隙及機床各運動軸運動平面圓度誤差等。張云[3]設計了一種五坐標動態精度檢測工具,該工具能夠結合RTCP功能準確地對機床進行動態精度檢驗,并能有效避免由于各種原因引起的檢測誤差。②通過加工典型標準試件來檢測,目前有美國航天工業協會提出的NAS979圓錐臺試件、國際標準化組織提出的ISO檢測試件等。范世平等[4]提出了通過NAS979圓錐臺試件對AC雙擺頭型五軸數控機床加工精度的檢測方法。Ohta等[5]分析了五軸數控機床動態特性變化對四角錐臺輪廓誤差的影響。中航工業成都飛機工業(集團)有限公司針對機床性能檢測,制造了一種S形檢測試件[6]。S形試件是通過在上下兩個等距離平面經過給定的50個標準點分別構建一條S形三階樣條曲線,通過上下兩條樣條曲線構造直紋面,將直紋面拉厚,再加上矩形基座構成的。
杜麗等[7]研究了S形試件在幾何造型方面的特性,證明了S形試件的加工能夠體現機床多軸聯動精度及機床的動態剛度性能。王偉等[8]通過仿真和實驗討論了機床一些重要參數對于S形試件加工誤差的影響,并給出了加工精度的預測和分析方法。彭志軍等[9]提出了一種基于S形試件檢測量結果及RTCP精度檢驗的用于機床動態精度快速檢測與優化的方法,并在多臺機床上展開應用。
S形試件具有薄壁,剛性差,幾何特征上又擁有連續變化的開閉角、扭曲角及平面曲率等特點,其加工精度能夠反映機床的加工性能,考驗機床的加工能力。但目前關于S形試件加工精度與機床動態性能之間的映射關系的研究未見報道,不能通過S形試件的加工誤差對機床的動態性能作出定性和定量的分析,對機床誤差的溯源和辨識缺乏映射關系的指導。由于S形試件具有對稱性,故本文主要針對選取S形試件的A面進行輪廓誤差與機床動態特性之間映射關系的分析和研究。
1 仿真模型的建立
1.1 運動軸進給系統建模
數控機床進給系統的仿真建模已經十分成熟,文獻[10-11]分別通過對平動軸與旋轉軸伺服結構與機械結構的簡化,基于PID控制原理將進給系統通過傳遞函數的方式進行建模分析。數控機床的進給控制系統一般采用三環控制,即電流控制環、速度控制環與位置控制環。由于電流環的響應非常快,并且在機床中經過初始設定后一般不再改變,所以本文將一般的三環結構伺服系統簡化為位置環、速度環兩環控制的進給伺服系統,并參照文獻[10-11]建立了進給系統的模型。如圖1所示。

圖1 進給系統結構圖
平動軸與旋轉軸的進給系統輸入分別是位移與旋轉角度,其進給系統性能決定了機床的工作性能和加工精度,所以為保證進給系統的輸出能滿足要求,進給系統應具有定位精度高以及速度調節快的性能。本文分別給出了平動軸與旋轉軸的進給系統數學模型(圖2、圖3),并給出了主要的仿真參數(表1)。

圖2 平動軸進給系統模型

圖3 旋轉軸進給系統模型

平動軸轉動軸位置環比例增益KpP(rad/s)1500060.5速度環比例增益KvP(rad/s)80003000速度環時間常數TI(ms)10.5電機慣量Jm(kg·m2)5.1×10-49.9×10-5
1.2 多軸聯動運動建模
數控機床刀尖點的軌跡是各軸運動聯合作用的結果,單軸的進給系統建模只能獲取單軸的運行軌跡,而數控機床實際的刀尖點運行軌跡則是各軸聯動的綜合作用的結果。本文以BA雙擺頭機床為研究對象,運用多體運動學理論[12]對其各軸的聯動運動模型進行建模。BA雙擺頭五軸機床拓撲結構如圖4所示。

圖4 BA雙擺頭五軸機床拓撲結構
根據多體運動學理論,針對機床拓撲結構,建立低序列矩陣,設定慣性參考系即機床底座為B0體,Y導軌為B1體,然后按遠離機床底座的自然增長方向為每個單元體編號,低序體陣列矩陣可由以下各式得到。
任選Bj為系統中的任意典型體,其n階低序體的序號定義為
Ln(j)=i
(1)
其中,L為低序體算子,稱體Bj為體Bi的n階高序體,滿足:
Ln(j)=Ln(Ln-1(j))
(2)
初始條件為
(3)
通過典型體之間理想特征變換矩陣T,建立從刀具坐標系到工件坐標系的變換矩陣,從而獲得刀尖點在工件坐標系中的實際位置。假設刀尖點在刀具坐標系中的坐標為Pt,那么根據多體運動學理論的特征變換矩陣及低序體陣列關系,刀尖點在工件坐標系中的坐標Preal為
(4)
由刀尖點在工件坐標系與刀具坐標系中的變換關系,可以獲取刀尖點在工件坐標系中各方向的位移與刀軸點之間的轉換關系:
(5)
其中,l為刀尖點到刀具旋轉中心的距離,下標t代表刀尖點,下標a代表刀軸點。以理想指令點作為各軸進給系統的輸入,然后通過輸出的實際刀軸點推算出實際刀尖點坐標,并求解理想指令點軌跡與實際刀尖點軌跡之間的法向間距,作為試件加工的輪廓誤差值。
2 仿真模型準確性驗證
通過仿真平臺的搭建可以得到S形試件的加工輪廓誤差,但是能否真實地反映實際加工情況不得而知。考慮到各軸的進給系統對應的動態性能參數較多,如果為研究每個運動軸進給系統動態性能對S形試件加工輪廓誤差的影響而分別進行實驗,將耗費大量的財力、物力。為節約實驗成本,希望借助于仿真模型的準確性,能夠較準確地反映S形試件的真實加工情況,于是進行了2次S形試件的切削實驗,將實驗數據與仿真結果進行對比,比較仿真結果是否可靠,實驗方案見表3。

表3 實驗方案 %
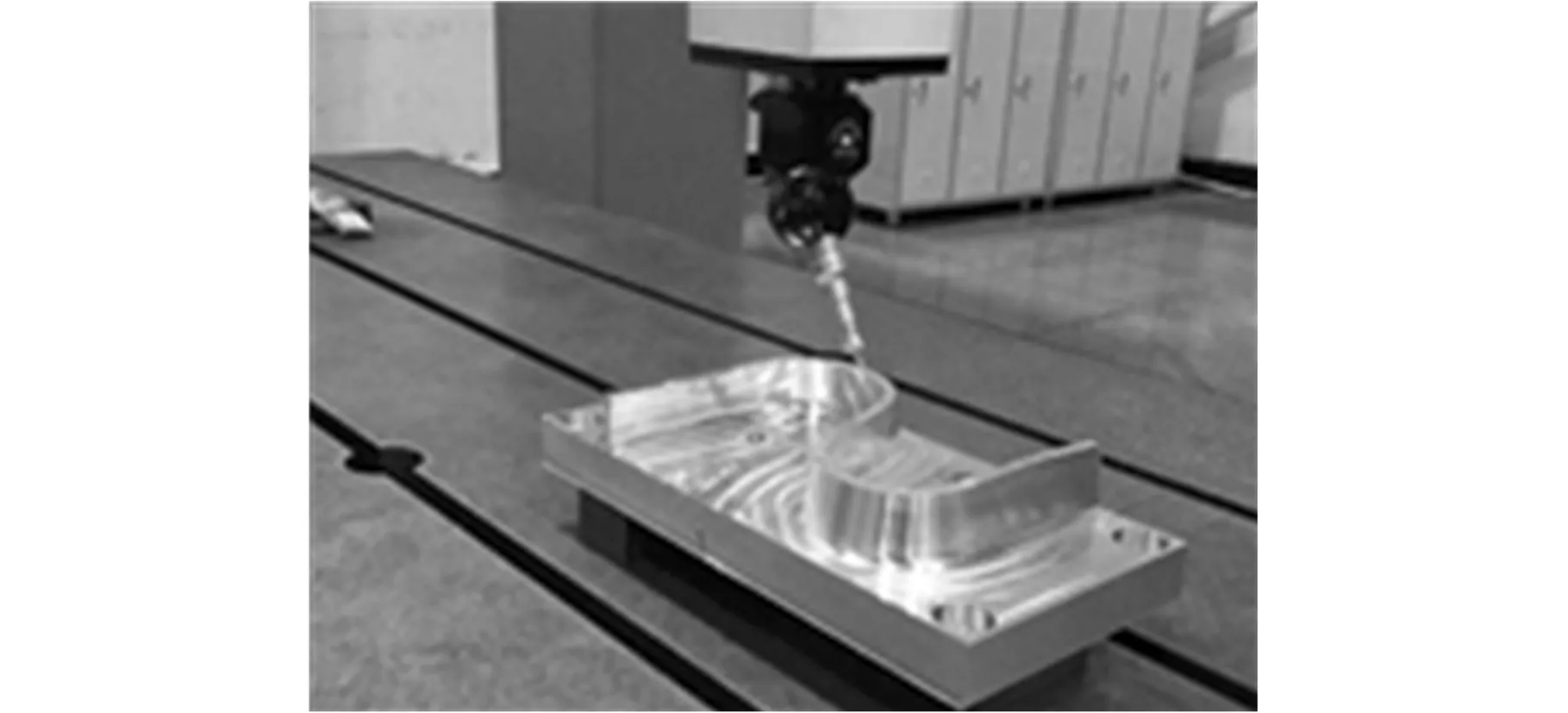
圖5 S形試件輪廓誤差的測量
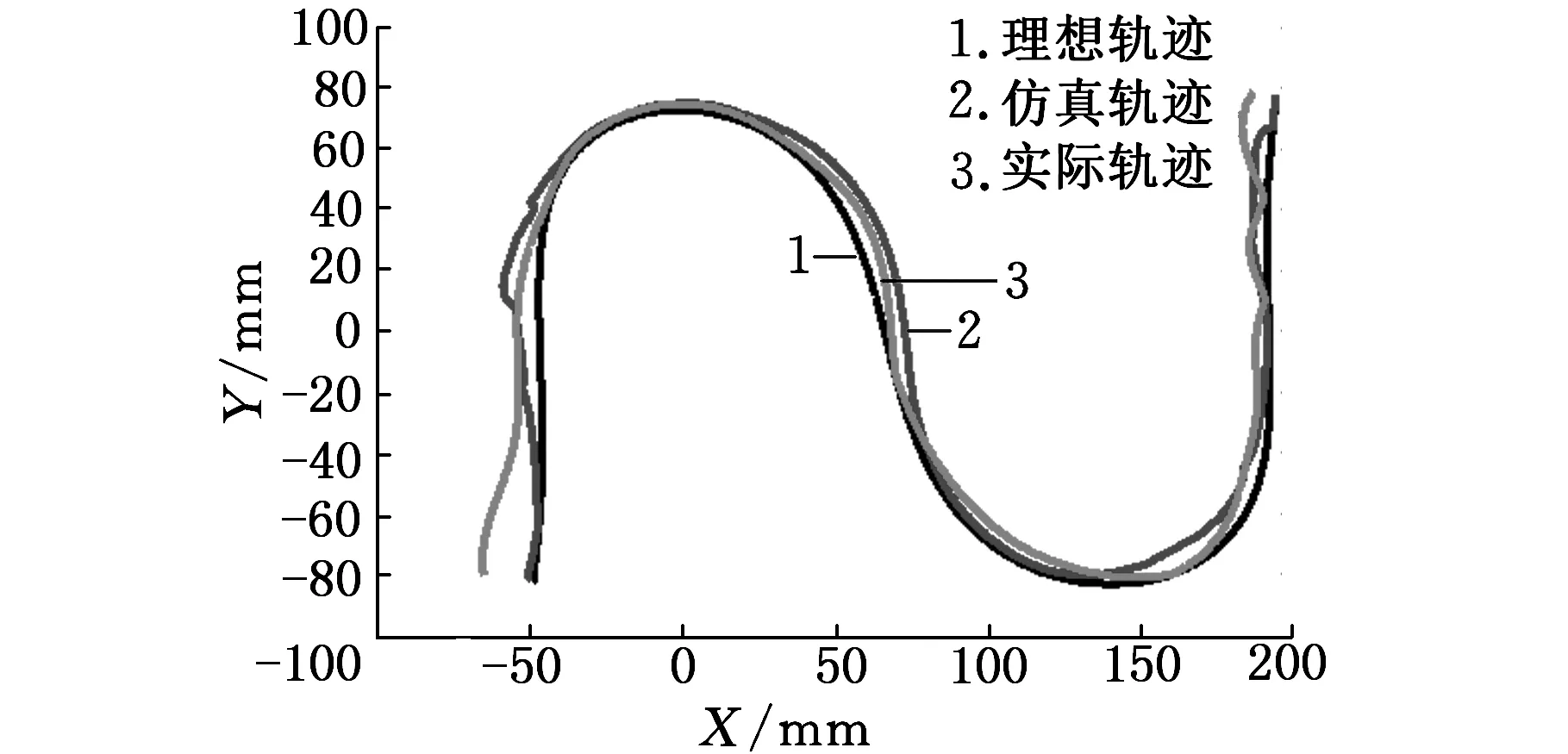
圖6 仿真與實驗對比(實驗1)
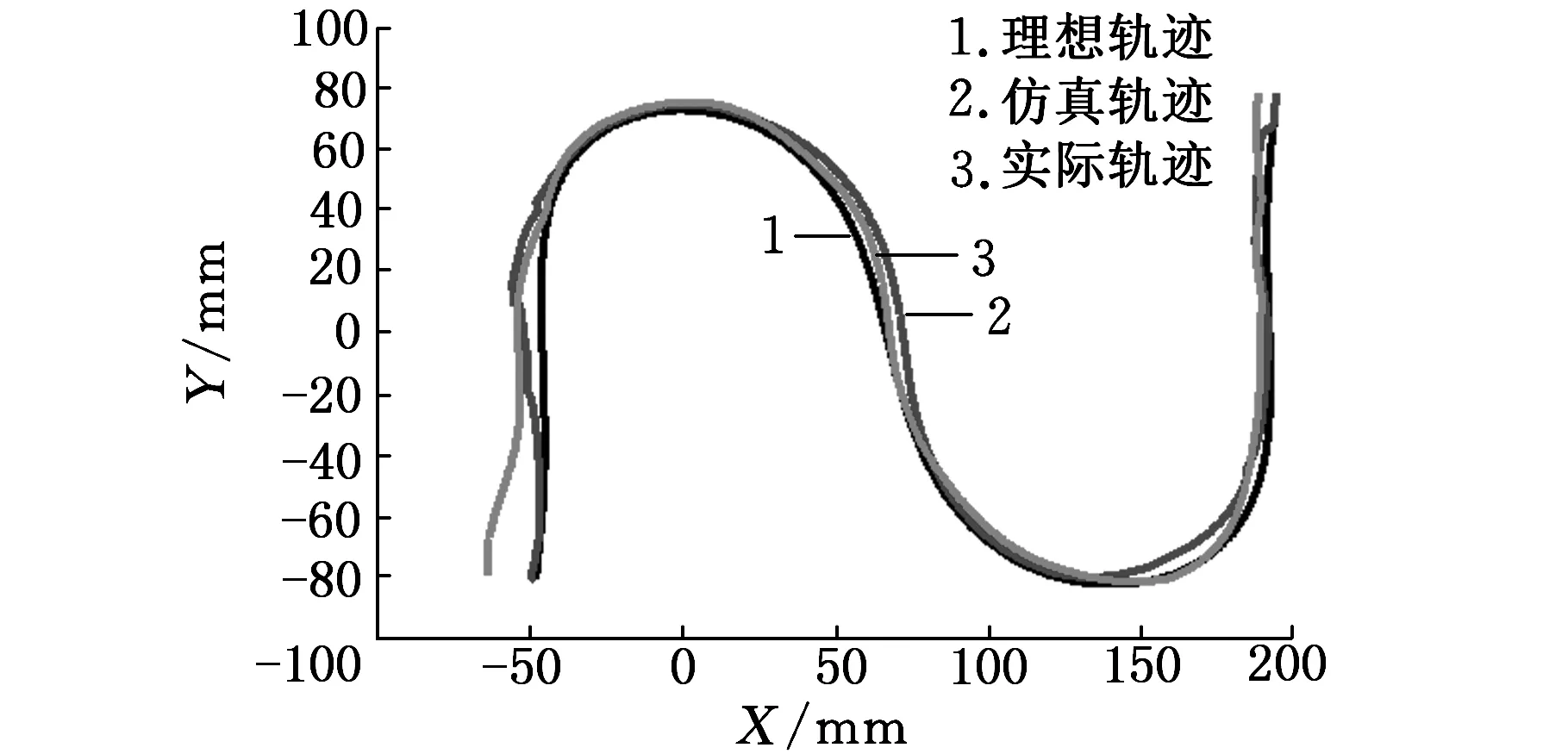
圖7 仿真與實驗對比(實驗2)
實驗方案將各運動軸的位置環增益及Y軸與B軸的加速度按照一定幅度進行調整,進行S形試件的切削加工。然后運用三坐標機進行S形試件表面輪廓誤差的測量,將測量的實際誤差值與仿真結果在S形試件的法向上放大100倍疊加顯示,觀察實驗值與仿真值的對比效果,如圖5~圖7所示。可以觀察到仿真軌跡與實際加工軌跡基本重合,幅值變化也基本相近,只是在S形試件左下方處誤差相差較大,但是觀察左下方處的誤差會發現,該位置的誤差值與S形試件其他位置的誤差值相比,幅值明顯增加,而且與理想軌跡偏離較遠,可以視作該位置處輪廓誤差的測量在實際操作中出現了一定的非線性誤差或者其他因素干擾,導致該位置處的誤差相比其他位置的誤差明顯增大,筆者認為該處的實驗采集數據可信度低,不能反映真實加工情況。綜上所述,仿真平臺的仿真結果可以較好地反映數控機床實際加工的真實情況,故本文借助仿真平臺的仿真結果來分析五軸數控機床動態特性與S形試件輪廓誤差之間的映射關系。
3 機床動態特性與S形試件輪廓誤差的映射關系
3.1 機床動態特性改變時對應S形試件輪廓誤差仿真分析
各運動軸動態特性的改變會不同程度地影響S形試件的輪廓誤差,本文從五軸數控機床各運動軸動態性能參數的變化來尋找S形試件輪廓誤差的變化規律。在改變單運動軸的動態性能時,本文考慮的是伺服系統中的位置環增益變化、速度環響應、各軸運行加速度限制及傳動部件存在反向間隙時每個性能參數單獨對誤差變化的影響。具體仿真條件設置見表4。

表4 仿真條件
以各機床各運動軸的原始狀態作為基準,即在各運動軸的動態性能參數未做改變時,S形試件仿真加工的輪廓誤差值作為輪廓誤差的初值δ。通過改變各運動軸的性能參數,使各運動軸的動態性能發生改變,通過仿真,得到新的S形試件的輪廓誤差值δ′,并與誤差初值δ進行比較,考慮誤差的變化量(即Δ=δ′-δ),找出誤差變化量在整個S形試件型面上的表現情況,從而找出S形試件輪廓誤差與機床動態性能之間的映射關系。
以平動軸X軸為例,當X軸的位置環增益增加25%時,將該狀態下機床對S形試件的加工輪廓誤差與機床初始狀態下S形試件的輪廓誤差進行比較,觀察誤差變化量的變化情況。在S形試件的形面上均勻設置75個誤差測量點(圖8),對應觀察當X軸位置環增益改變時這些測量點位置處誤差的變化(圖9)。

圖8 測量點位示意圖

圖9 X軸位置環增益變化時測量點位誤差
將誤差增量疊加在S形試件的形面上以色塊圖的方式進行顯示,以便明顯地觀察誤差變化情況,從而分析各軸動態特性改變后的S形試件輪廓誤差在整個S形試件形面上的變化規律。圖10所示為X軸位置環增益增加25%時誤差增量在整個S形試件形面表現的色塊示意圖。以平動軸X軸為例,所有運動軸的動態性能參數都進行相同的仿真分析。

圖10 誤差增量色塊圖
3.2 對S形試件進行分區與仿真分析結果
根據圖10可以清晰地看到,誤差在整個S試件形面上的分布按照大小呈現一定的規律,這與S形試件的幾何特性相關。為了進行誤差表現區域的定性以及誤差增量大小的定量分析,本文對S形試件依據其誤差表現及幾何特點進行分區處理。分區處理后機床動態特性與S形試件輪廓誤差映射關系的研究和表述更加方便,且為其誤差溯源和辨識提供了便利。
將S形試件分為7個區域,并將其中的C區和E區進行細化分為兩個小區域,其中由于S形試件D區的中點,即X坐標范圍在66~70 mm之間的區域是S形試件開閉角的轉換區域,具有能反映誤差的效果,故單獨將其作為一個表現區域M。可以發現A、B、F、G區的曲率變化平緩,而C、E兩個區是曲率值最大的兩個曲面區域,D區作為C、E兩個區域的連接區域,曲率變化大并且包含開閉角的轉換,每個區域都具有反映誤差變化的特性。各區的分界點見表5,S形試件的分區如圖11所示。

表5 分區臨界點 mm
注:A/B表示A區與B區的分界點,后同。

圖11 S形試件進行分區示意圖
由于五軸數控機床對應的各軸動態性能參數較多,本文只給出了典型的平動軸X軸與旋轉軸A軸這兩個運動軸動態性能改變時,誤差增量的平均值在S形試件各區域的表現情況,并記錄于表6與表7中。表中記錄了S形試件各區域的誤差表現值,并通過誤差值的大小確定各性能參數改變時對應的明顯表現區域。

表6 X軸參數變化時誤差在各區域的表現

表7 A軸參數變化時誤差在各區域的表現
4 結論
(1)位置環增益的大小改變、速度環的響應變慢以及加速度限制值的降低,對于S形試件的輪廓誤差無論從大小的影響程度還是表現區域來看都是有區別的。S形試件作為一種檢測試件,其加工精度就是作為檢驗機床性能的一種判斷依據,而通過仿真分析的結果,我們獲取了機床動態性能與S形試件輪廓誤差之間的映射關系,證明了S形試件能夠很好地反映機床的動態性能,考察機床的性能參數。
(2)S形試件輪廓誤差與機床動態特性的映射關系的分析,為機床性能的評判建立了依據。可以通過對S形試件各區域的誤差大小、表現區域及對應的動態性能參數賦予權重,對五軸數控機床各運動軸進行綜合評價來衡量機床的加工性能。
(3)由于S形試件輪廓誤差在各性能參數和各形面區域所表現出的差異,可以通過大量的仿真和實驗數據,借助于線形回歸、神經網絡等算法,溯源和辨識出一種加工狀態下S形試件輪廓誤差所對應的五軸數控機床的動態性能,為機床各運動軸性能參數的調整提供指導依據。
(4)本文分析了機床動態性能與S形試件輪廓誤差間的映射關系,為改善機床動態性能、機床性能評價及誤差的溯源與辨識提供了依據。
[1] 葉佩青,王仁徹,趙彤,等. 機床整機動態特性研究進展[J]. 清華大學學報(自然科學版), 2012,52(12): 1758-1763. Ye Peiqing, Wang Renche, Zhao Tong, et al. Recent Research Advances of Whole Machine Tool Dynamics[J].Journal of Tsinghua University(Science & Technology),2012,52 (12): 1758-1763.
[2] 劉闊. 數控機床性能測試技術研究[J]. 產品與技術,2012(4): 82-88. Liu Kuo. Research of Machine Tool’s Performance Test [J]. Products & Technology, 2012(4): 82-88.
[3] 張云. 一種基于RTCP功能的五坐標動態精度檢測工具[J]. 制造技術與機床, 2012(11): 92-94. Zhang Yun.A Kind of Five-axis Dynamic Precision Measure Tool Based on the RTCP Function[J]. Technology and Test, 2012(11): 92-94.
[4] 范世平,劉艷紅,仇健,等. A、C雙擺頭型五軸機床工作精度檢驗方法研究[J].工具技術, 2013,47(4): 67-69. Fan Shiping, Liu Yanhong, Chou Jian, et al. Study on Evaluating Scheme of Machining Accuracy of AC Head Type Five Axis Machine Tool[J]. Tool Engineering, 2013,47(4): 67-69.
[5] Ohta K, Li Z M, Tsutsumi M. Proposal of a Machining Test of Five-axis Machining Centers Using a Truncated Square Pyramid[J].Key Engineering Materials, 2012, 523/524: 475-480.
[6] 宋智勇, 崔雅文. 綜合檢測數控銑床精度的“S”形檢測試件及其檢測方法: 中國, CN101000285A[P]. 2007-07-18.
[7] 杜麗,張信,王偉,等. “S”形試件的五軸數控機床綜合動態精度檢測特性研究[J]. 電子科技大學學報,2014,43 (4): 629-635. Du Li, Zhang Xin, Wang Wei, et al. Research on Properties of “S” Shaped Test Piece on Synthesis Dynamic Accuracy Detection of Five-axis CNC Machine Tools[J]. Journal of University of Electronic Science and Technology of China, 2014,43 (4): 629-635.
[8] 王偉,張信,鄭從志,等. 航空復雜曲面加工精度預測及影響因素分析[J]. 電子科技大學學報,2014,43(5): 787-793.
Wang Wei, Zhang Xin, Zheng Congzhi, et al. Analysis for Machining Precision Prediction and Influencing Factors of Complex Surface in Aviation[J]. Journal of University of Electronic Science and Technology of China, 2014,43(5): 787-793.
[9] 彭志軍, 劉大煒,宋智勇. 一種五軸聯動機床動態精度檢測及優化方法[J].制造技術與機床, 2013(8): 35-39. Peng Zhijun, Liu Dawei, Song Zhiyong. A Measuring and Optimizing Method of Five-axis Movement Accuracy of CNC Machine Tools[J]. Manufacturing Technology & Machine Tool, 2013(8): 35-39.
[10] Altintas Y, Verl A, Brecher C, et al. Machine Tool Feed Drives[J]. CIRP Annals -Manufacturing Technology,2011,60(2): 779-796.
[11] 張奡,周凱. 數控機床旋轉進給系統的狀態空問模型及性能分析[J]. 制造業自動化, 2007, 29(8): 40-44. Zhang Ao, Zhou Kai. State Space Model and Performance Analysis of Numerical Control Machine Rotary Feed System[J]. Manufacturing Automation, 2007, 29(8): 40-44.
[12] 李圣怡,戴一凡.精密和超精密機床精度建模技術[M].長沙:國防科技大學出版社,2007.
(編輯 陳 勇)
Analysis for Mapping Relationship among CNC Machine Dynamic Performance and S-Shaped Specimen Contour Errors
Song Zhiyong1,2Li Qingzhao1Jiang Zhong1Kang Wenjun1Du Li1Wang Wei1
1.University of Electronic Science and Technology of China,Chengdu,611731 2. CNC Machining Factory of Chengdu Aircraft Industrial (Group) Co.,Ltd.,Chengdu,610092
A simulation model was established herein based on double swing five-axis CNC machine, and the accuracy was validated. Then the variation of S-shaped specimen contour errors under different CNC machine dynamic performances were found. And based on the simulation results, S-shaped specimen was divided into areas, and the mapping relationship among contour errors and areas was found. This study provides a basis for adjusting the actual machining five-axis CNC machine dynamic performance parameters and performance evaluation of CNC machine and processing error tracing and identification.
five-axis CNC machine; dynamic performance; S-shaped specimen; mapping relationship
2015-06-30
國家科技重大專項(2014ZX04014-031)
TH161
10.3969/j.issn.1004-132X.2016.23.006
宋智勇,男,1971年生。電子科技大學機械電子工程學院博士研究生,成都飛機工業(集團)有限責任公司數控加工廠工程師。主要研究方向為精密機床精度檢測、復雜曲面加工技術。李晴朝(通信作者),男,1990年生。電子科技大學機械電子工程學院博士研究生。姜 忠,男,1989年生。電子科技大學機械電子工程學院博士研究生。康文俊,男,1990年生,電子科技大學機械電子工程學院碩士研究生。杜 麗,女,1970年生。電子科技大學機械電子工程學院教授、博士。王 偉,男,1980年生。電子科技大學機械電子工程學院副教授、博士。
