直流電機建模與PID控制器參數優化
2016-12-24 07:49:29李曉龍宛劍業
汽車實用技術 2016年1期
李曉龍,宛劍業
(遼寧工業大學汽車與交通工程學院,遼寧 錦州 121001)
直流電機建模與PID控制器參數優化
李曉龍,宛劍業
(遼寧工業大學汽車與交通工程學院,遼寧 錦州 121001)
文章首先采用simcapeTM物理建模方法對直流電機進行建模并通過實測數據校準模型中各個參數,使得所建模型能夠真實的反應被控對象,然后在simulink環境下在直流電機模型基礎上添加PID控制器模型,并利用數值優化的方法對PID控制器三個參數KP KI KD進行整定,使得控制器能夠滿足一定的設計指標要求并且當直流電機參數在一定范圍內變化時仍然具有良好的魯棒性。
PID;計算機仿真;建模;優化;SimscapeTM
10.16638/j.cnki.1671-7988.2016.01.036
CLC NO.:TP391.9 Document Code:B Article ID:1671-7988(2016)01-105-03
引言
目前基于模型設計的思想已廣泛應用于直流電機控制器開發,被控對象和控制器模型是基于模型設計的起點和核心,其中重點是被控對象模型的準確性以及控制器參數優化。PID控制器的參數整定是控制系統設計的核心內容,在傳統設計方法中,手動調節是完全依賴經驗的試湊過程,耗費時間而且不系統化,很有可能無法達到優化設計。基于控制規則的調試方法,比如尼克爾斯法,需要大量的工作,需要研究者有良好的理論背景,它還不能對開環不穩定系統進行調節。因此如何快速準確的整定PID三個參數是的控制系統達到要求的性能成為科研工作者一個重要的課題。
1、電機建模
建模是研究系統的重要手段和前提,常用的建模方法有機理建模、測試分析建模以及機理建模與系統辨識相結合的方法。本文電機建模采用第三種方法,該建模方法是前兩種方法的綜合即用機理分析方法建立模型的結構,用系統測試方法來確定模型的參數。
1.1 建模分析
電機由電氣部分和機械部分組成,電機模型如圖1所示。
Simscape模塊庫中有豐富的機械、電氣、液壓和其他物理域組件,如電阻電感慣量組件和物理信號測試組件。利用上述組件依照圖1中各個組件物理連接關系可以快速搭建起電機的物理模型如圖2所示,模塊之間的連線相當于物理連接,用于傳遞能量。通過這種方法描述的是系統的物理結構,而非底層的數學原理。模型與原理圖非常相似,SimscapeTM可以從建立的模型中自動構造微分代數方程 (DAE),描述系統動態性能。
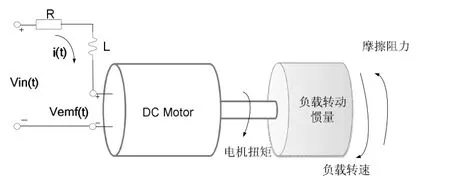
圖1 電機物理模型
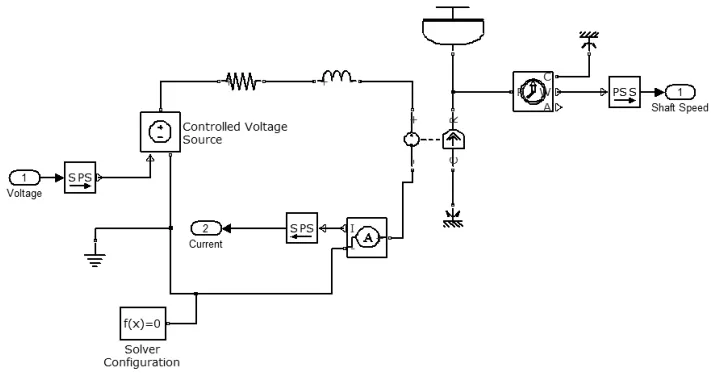
圖2 電機SimscapeTM模型
1.2 模型參數辨識
上文通過機理建模建立電機物理模型,但是實際應用中往往不知道電動機的電機電感電阻以及負載的轉動慣量等數據。即使制造商提供這些數據同一批次的電機參數也會有變化,為了保證模型能夠真實反映實際對象需要對模型進行參數辨識。經典的系統辨識方法有階躍響應法、頻率響應法和最小二乘法。最小二乘法是一種數學優化技術,作為動態系統辨識的主要手段之一,最小二乘法可以用于各類數學模型。利用最小二乘法辨識參數過程一般為在相同的激勵條件下,通過調整模型中未知參數值使得模型輸出與實物實測輸出數據之間誤差平方和最小。上述過程在matlab中parameter estimation tool中可以很方便的實現。
2、PID控制器設計
PID(比例積分微分)英文全稱為ProportionIntegration Differentiation,它以結構簡單、穩定性好、工作可靠、調整方便等特點成為工業控制的主要技術之一。
PID控制器由比例部分,積分部分和微分部分構成(如下圖3所示)。控制器的輸入端是被控系統的控制信號與被控量間的誤差,誤差信號分別通過比例、積分、微分環節,并與相應的系數相乘,輸出的PID控制器信號即為這三個部分輸出信號之和,最終PID控制器輸出信號與原始控制信號做差后控制被控量,最終形成完整的反饋回路。因此,要確定一個PID控制器只需要確定其比例、積分、微分的系數:
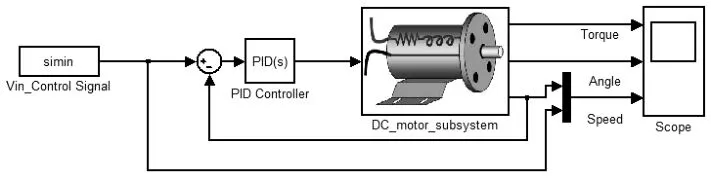
圖3 直流電機PID控制模型
2.1 用PID Tuner設計PID控制器
雙擊打開PID模塊的設置頁面,如圖4所示:
在Controller下拉菜單中選擇控制器模式為PID。在Time-domain定義為連續域控制器和離散域間切換。
下面是最重要的一步:設置P、I、D的系數。傳統的手動調節法不僅費時費力,還有可能對系統造成破壞,并且你永遠不知道自己設計出的參數是否為最優。
而基于規則的調節法無法應用于開環的不穩定系統,也不能用于高階系統和有延遲的系統,且對用戶的控制理論背景要求很高,不易掌握。
Simulink提供了一個全新的GUI調節算法可以方便的完成這些復雜的工作,自動調節控制器參數以達到所期望的性能指標,通過簡單的滾動條操作完成微調的功能。
點擊參數設置頁面上Controller settings中的“Tune”按鈕打開GUI界面(點擊show parameters可以完整的顯示參數)。如圖5所示:

圖5 PID自動調節界面
PID Tuner會自動在系統缺省的工作點處對模型進行線性化處理,設計出控制器的參數。用戶可以直觀的通過GUI界面看到系統的響應。
界面的下方有一個滾動條工具,通過拖動滾動條可以調節系統的響應時間,這里我們將響應時間調節到0.0785s。通過GUI界面可以看到系統響應速度明顯提高,并出現了一個小的過沖。
如果在界面上方的Design mode下拉菜單中選擇“extended”,會出現額外的兩個滾動條“帶寬”和“相位裕量”,通過拖動它們可以改變系統響應的快速性和平穩性。如圖6所示。

圖6 調節滑塊
在顯示階躍響應曲線的區域內單擊鼠標右鍵,根據需要選擇characteristics中的一項或幾項,會在響應曲線上添加相應的藍點來表示這些特征點:
- Peak Response 峰值
- Setting Time 穩定時間
- Rise Time 響應時間
- Steady State 穩定狀態
左鍵點擊這些藍點會顯示其詳細信息,如圖7所示:

圖7 定位特征點

圖8 PID參數
當用戶得到滿意的響應曲線后,點擊Apply按鈕,PIDTuner自動設計的參數就已經寫入到了參數設置框中。如圖8所示。
運行加入PID控制器后的直流電機模型。可以看到,響應速度得到了很大提高,被控量轉速基本上已經和控制信號基本吻合了。如圖9所示:

圖9 仿真結果
3、結論
基于simscape物理建模可以快速的建立被控對象的物理模型,而無需考慮被控對象的復雜的數學模型,建模過程方便快捷。利用PID tuner可以快速的調節PID控制器的參數,只需在調試前設置相應的控制目標,matlab會自動的在后臺調用優化算法完成KPKIKD的整定。
[1] 劉杰.基于模型的設計:MCU篇[M]. 北京:北京航空航天大學, 2011.
[2] Robyn A. Jackey. A Simple, Effective Lead-Acid Battery Modeling Process for ElectricalSystem Components Selection[J]. Journal of Power Sources, 2006, 152(2):13:56-84.
[3] 趙國才,孫廣濤.電動車無刷直流電機simulink建模仿真[J].計算機系統應用, 2012.
[4] 劉道.基于改進粒子群優化算法的PID參數整定研究[D]. 衡陽:南華大學,2012.
DC Motor Modeling and Optimization of PID controller
Li Xiaolong, Wan Jianye
( Automobile and Traffic Engineering College, Liaoning University of Technology, Liaoning Jinzhou 121001 )
Firstly, the use of physical modeling method simcape DC motor is modeled and measured data by calibrating the model parameters, so that the model can be real reaction controlled object, and then add in the simulink environment PID control for DC motor based on the model model, using numerical optimization methods for PID controller tuning KP KI KD three parameters, so that the controller can meet certain design requirements and when the DC motor parameters within a certain range still has good robustness.
PID; computer simulation; modeling; optimization; SimscapeTM
TP391.9
B
1671-7988(2016)01-105-03
李曉龍,就讀于遼寧工業大學汽車與交通工程學院。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
井岡教育(2022年2期)2022-10-14 03:11:44
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
家庭影院技術(2017年9期)2017-09-26 03:41:45
中學生數理化·中考版(2017年12期)2017-04-18 12:55:05
