一種長行程小型化對接機構設計與分析
2016-12-24 06:53:34李隆球邵廣斌周德開劉偉民王敬軒
載人航天 2016年6期
關鍵詞:機械
李隆球,邵廣斌,周德開,劉偉民,王敬軒
(1.哈爾濱工業大學機電工程學院,哈爾濱150001;2.哈爾濱工業大學機器人技術與系統國家重點實驗室,哈爾濱150001)
一種長行程小型化對接機構設計與分析
李隆球1,2,邵廣斌1,周德開1,劉偉民1,王敬軒1
(1.哈爾濱工業大學機電工程學院,哈爾濱150001;2.哈爾濱工業大學機器人技術與系統國家重點實驗室,哈爾濱150001)
針對故障航天器和太空垃圾的在線對接與操作問題,基于非合作目標對接技術的要求和特點,提出了一種以衛星遠地點發動機噴管為對接接口的長行程小型化的對接機構方案。設計了對接機構的具體結構并建立其三維模型,并根據此模型,對對接機構的包絡范圍進行了求解分析;使用ADAMS軟件對機構進行了動力學仿真,研究了對接過程中目標噴管的運動學特性,分析了末端機構與目標的碰撞接觸情況及機械臂中各關節受力情況。計算與仿真結果表明:所提對接機構能夠對目標進行有效、可靠的對接。
長行程小型化;非合作目標;對接機構
1 引言
空間交會對接技術指使兩個航天器在空間軌道上對接合并,在結構上成為一個整體的技術[1],具有重要的空間應用價值和前景,美國、歐洲、日本等已對空間自主交會對接、空間機器人等非合作目標對接的前期基礎技術進行了大量研究,完成了大量的空間演示和試驗,取得了一定成就。德國航天局開展的以在軌維修及裝配為目的的TECSAS/DEOS研究計劃[2]、美國以目標衛星軌道操作為目標的FREND項目[3?5]以及在此基礎上開展的“鳳凰計劃”[6?7]都是非合作目標對接技術研究的先行代表。國內哈爾濱工業大學的張廣玉等以地球同步軌道衛星為對接捕獲目標設計了一系列三臂型對接機構[8?12],采用包絡捕獲的原理,使用圓周上120°均勻分布的三組機械臂作為執行機構完成對衛星遠地點發動機噴管的對接抓捕。包絡捕獲方案科學,機構簡單,驅動元件少,有很高的研究與應用價值,但機構尺寸與質量較大,若進行空間應用發射成本較高。
本文設計了一種以地球同步軌道衛星為抓捕對象的長行程、小型化非合作目標對接機構,該機構具有捕獲范圍大、可靠性高、適應性強、定位精準等特點。
2 對接機構捕獲原理及方案
本設計中,目標航天器選擇為地球同步軌道衛星,該類衛星種類齊全,數量眾多,研究也最具代表性。衛星上都安裝有遠地點發動機,本設計即以遠地點發動機噴管[13?15]作為對接接口進行對接機構的設計。該噴管及簡化模型如圖1、圖2所示。簡化后的噴管尺寸如表1所示。

圖1 衛星遠地點發動機噴管圖[14]Fig.1 The apogee kick engine nozzle of target GEO satellite[14]

圖2 簡化后的噴管Fig.2 Simplified nozzle model

表1 噴管尺寸參數表Table 1 Engine nozzle dimension
考慮工程實際,以及對接任務的非合作性,對接機構需要具有小型化、長行程的特點。對接機構小型化將降低對其本體衛星的要求,也會降低對接機構及本體衛星的發射成本;對接機構長行程用以提升距離,進而消除本體衛星與目標噴管的軸向距離,且能為空間相機的視距提供良好保障。
2.1 對接機構原理
根據對接機構長行程、小型化特點,經過對設計要求以及抓捕目標等因素的綜合分析,采用機械臂包絡捕獲的方式完成對接捕獲,并使用多級絲杠實現抓捕機構的長行程移動。對接原理如圖3。在發現目標后,先由搭載對接機構的本體衛星與目標逐漸靠近并穩定在對接初始條件要求內,完成空間交會。抓捕機構采用平行四桿機構,該機構的鉸鏈安裝有扭簧,扭簧有一定的預載荷,預載荷能夠使平行四桿機構向外張開。滾子安裝在抓捕機構的機架上,與絲杠的相對位置保持不變。執行機構運動的初始階段,由于平行四桿機構特性,在滾子支撐與彈簧預載荷的綜合作用下,螺母的上升只能使四桿機構向上移動。螺母繼續上升,當鉸鏈逐漸上升至脫離滾子的支撐時,四桿機構將在扭簧的作用力下向外張開,形成一個使噴管進入的包絡空間,同時抓捕機構在多級絲杠機構驅動下靠近目標衛星的遠地點發動機噴管直至噴管進入抓捕機構的包絡范圍;然后機械臂收攏,包絡空間收縮,將噴管前端鎖定在包絡空間內并鎖緊固定,實現目標航天器與本體航天器的對接;為方便抓捕完成后本體航天器對目標航天器的進一步動作,多級絲杠收回以拉動抓捕機構并帶動噴管和目標航天器靠近本體航天器;操作完成后,執行機構打開,彈出機構將噴管彈出。
2.2 對接機構總體方案
根據包絡捕獲原理以及對接過程流程,細化各功能結構,完成機構設計。對接機構總體方案如圖4所示。對接機構包含四大功能機構:提升機構、執行機構、緩沖機構、彈出機構。
提升機構:目標航天器與本體航天器在對接開始前有500 mm的軸向距離,提升機構負責將抓捕機構提升500 mm行程以靠近目標航天器噴管。
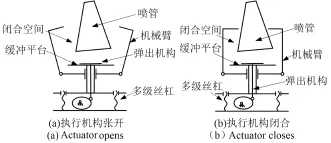
圖3 對接機構原理圖Fig.3 Principle diagram of the docking mechanism

圖4 對接機構總體方案Fig.4 Overall structure of the docking mechanism
執行機構:執行機構負責完成對目標的抓捕、鎖緊等動作。執行機構的末端應保證形成的包絡空間有效可靠,防止抓捕目標發生逃逸。
緩沖機構:為避免對接過程中碰撞接觸力過大造成機構破壞,緩沖機構應有效緩沖對接機構與噴管之間的沖擊碰撞。
彈出機構:彈出機構負責將已抓捕的目標噴管彈出,使其與本體航天器有一定的分離速度。分離速度應大小適中,同時,分離角速度也應控制在合理范圍內。
此外,對接機構還需傳動系統及機架完成傳動和支撐等功能。傳動系統的驅動數量要盡可能減少,傳動部件的傳遞效率應盡可能高,以提高系統的可靠性與傳動效率。機架負責支撐整個系統,作為抓捕機構的載體,應保證支撐強度與剛度。
最終設計的對接機構直徑350 mm,高度345 mm,質量23 kg,軸向提升行程可達500 mm,機械臂張開后末端機構形成的圓直徑超過220 mm,可容納噴管同時有50 mm的徑向偏差以及10°的角度偏差。
3 對接機構的運動學分析
3.1 機械臂的運動軌跡求解
執行機構的機械臂為平行四桿機構。其特點是相對兩桿相互平行且以相同角速度同時轉動,連桿做平行移動。根據對對接機構的分析,機械臂能夠順利張開與閉合、成功完成抓捕動作,依賴于安裝在鉸鏈處的扭簧以及在各自方向上提供平動與旋轉支撐的滾子的共同作用,二者決定了機構能否正常工作[16]。定義X軸為平行于機械臂的橫向對稱軸,X軸、Y軸、Z軸方向符合右手坐標系法,機械臂的運動簡圖如圖5所示。
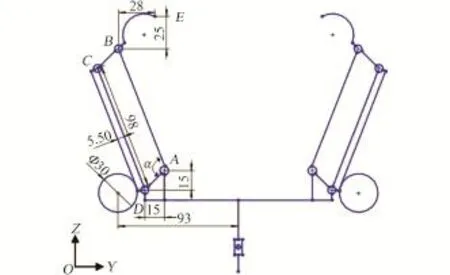
圖5 機械臂運動學簡圖Fig.5 Schematic diagram of the docking mechanism
A處的鉸鏈安裝有扭簧,扭簧有一定的預載荷,預載荷能夠使平行四桿機構向外張開。滾子安裝在抓捕機構的機架上,與絲杠的相對位置保持不變。執行機構運動的初始階段,由于平行四桿機構特性,在滾子支撐與彈簧預載荷的綜合作用下,螺母的上升只能使四桿機構向上移動。螺母繼續上升,當D處鉸鏈逐漸上升至脫離滾子的支撐時,四桿機構將在扭簧的作用力下向外張開,形成一個使噴管進入的包絡空間。
在抓捕過程中,機械臂打開,根據其運動約束關系及結構形式,假設直線CD表達式為式(1):

式中k為直線斜率,b為直線在y軸截距。
以對接機構底面中心為坐標原點,滾子軸心O(m,n)為(-93,780)與直線 CD距離為d=20.5 mm。由于機構運動的確定性,以及機械臂收回時間的不確定性,在最高點位置,即多級絲杠完成500 mm行程的伸展后,執行機構所在位置上末端機構在機械臂張開過程中的運動軌跡,與機械臂在閉合收回過程中的運動軌跡相同。因此,可以求解張開過程中的末端機構運動軌跡作為替代,以D點與滾子軸心位置水平時為時間起點。D點坐標為(xD,yD),根據D點在直線CD上可得式(2)所示方程組:

此時末端機構上E(xE,yE)點的位置如式(3):

式中:v為螺母的提升速度(mm/s),t2——時間,以A點與O點水平為時間起點(s)。
通過計算得出的末端機構軌跡散點,可做出坐標值隨時間變化的曲線如圖6所示。
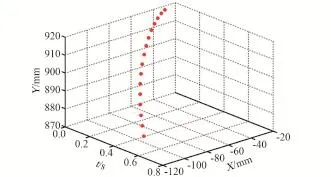
圖6 抓捕過程中末端機構的軌跡曲線Fig.6 Trajectory of the tip mechanism
對于執行機構機械臂,其張開特性對抓捕過程并不重要,重要的是其閉合收回的急回特性及軌跡的確定性。從末端機構的軌跡散點結果及軌跡圖可以看出,機械臂的收回非常迅速,不到1 s,即可從張開狀態完全收合,使噴管不能逃脫。
3.2 機械臂與緩沖機構聯合工作空間求解
機械臂的工作空間是末端機構能到達的點的集合,是機械臂的活動范圍。求解機械臂與緩沖機構聯合圍成的工作空間,能保證目標噴管順利進入機械臂包絡的范圍,對于成功完成抓捕對接非常重要。因此需要通過確定機械臂的工作空間來設計機械臂整體的結構尺寸,以保證機構的合理性。由機械臂在圓周上以120°均勻分布,可以確定三個機械臂圍成的工作空間,根據誤差最小原則進行擬合,并以y軸為中心軸,旋轉一周得式(4):
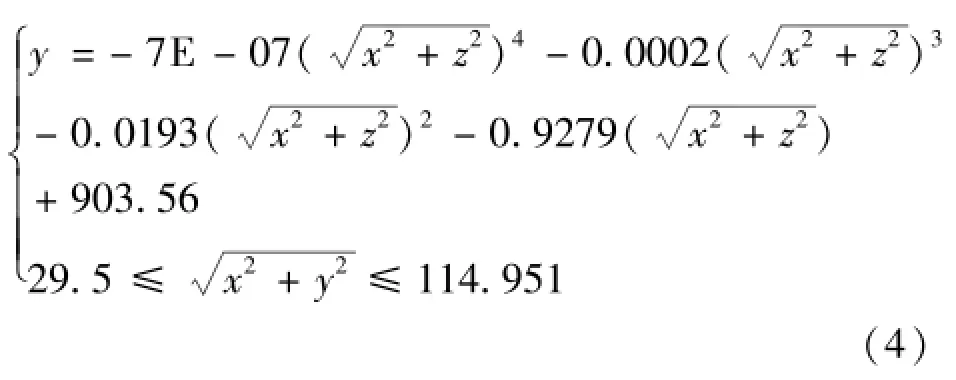
緩沖機構是由彈簧支撐的平面,半徑大小為45 mm,行程為5 mm,故其運動軌跡為一圓柱體,其表達式如式(5):

根據初始對接條件及對接原理,噴管最大徑向偏差為50 mm左右、最大角度偏差為10°左右時,機械臂能成功抓捕目標所需要的空間范圍及本設計可提供的工作空間范圍如表2所示。
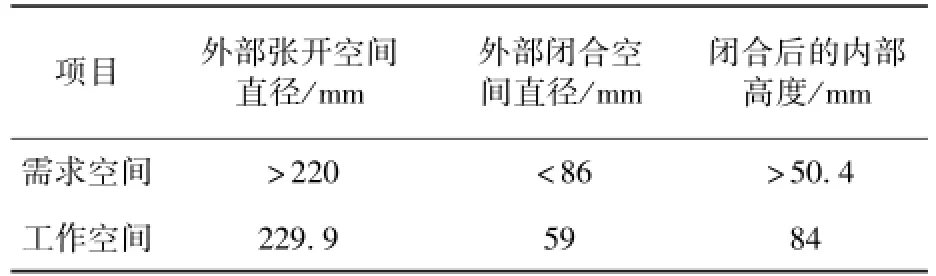
表2 工作空間對比Table 2 Comparison of work space
由表2可以看出,三個機械臂張開時,圍成的空間直徑D為229.9 mm,而目標衛星上噴管相對于本體衛星的最大位置偏差S為50 mm,最大角度偏差為10°,噴管直徑d為86 mm,因此最大位置范圍直徑約為220 mm。機械臂在收合狀態下形成的包絡圓周大小為59 mm,大于噴管小徑32.4 mm,小于噴管大徑86 mm,可知末端機構的包絡圓能將噴管大徑包羅其中,完成抓捕。通過對比需求空間與工作空間,以看出三個機械臂與緩沖機構聯合圍成的空間可以滿足需要。工作空間可使所有噴管順利進入機械臂與緩沖平臺形成的包絡空間內,機械臂可將噴管成功包絡捕獲。
4 對接機構動力學分析
根據運動學與動力學定義,將各構件簡化為剛體,使用Solidworks進行3D建模,簡化后導入ADAMS,模型如圖7所示。
通過對驅動的設置進行仿真過程的時間控制,仿真時長為69 s,步數為2000步,初始對接條件為:軸向距離500 mm,徑向距離20 mm,俯仰角偏航角均為0°。
對接過程具體時間設置:0~15 s,絲杠螺母機構驅動機械臂張開;0~20 s,多級絲杠與套筒運動,提升機構伸出;20~25 s,機械臂收回,將目標噴管包絡并壓緊;40~45 s,多級絲杠反向運動,將執行機構與目標噴管收回500 mm;45~50 s,停止運動,等待下一步動作;50~53 s,機械臂提升5 mm,緩沖機構升起,解除對噴管的壓緊;53~55 s,等待噴管穩定;55~58 s,機械臂張開,保證噴管能夠從包絡空間內彈出;58~64 s,凸輪轉動,彈出機構將噴管與目標航天器彈出;64~69 s,機械臂收回,完成動作。
4.1 目標噴管位姿變化情況分析
定義X軸為平行于航天器的橫向對稱軸,X軸、Y軸、Z軸方向符合右手坐標系法。圖8(a)為噴管在X、Z兩個徑向分量方向上的位移隨時間的變化曲線,在X向的初始位移是20 mm,Z向的初始位移為0。在第21 s時,機械臂收合,與目標噴管發生碰撞接觸,此時徑向位移會有比較大的波動;但是經過機械臂的拉回與壓緊動作,目標噴管在第25 s之后,徑向位移由于末端機構的校正作用最終消除;55~58 s過程中,噴管由于失去機械臂的壓緊而以自由狀態運動;至60 s,噴管被彈出后在徑向上遠離對接機構。圖8(b)為目標噴管的軸向位移,以初始位置為零點,噴管在21 s時開始在末端機構的拖拉作用下逐漸靠近對接機構底座,在45 s時軸向位移達到最大,之后為機械臂上升及保持階段,噴管在緩沖機構彈簧的作用下逐漸上升,在60 s左右時被彈出機構彈開。

圖8 目標位移曲線圖Fig.8 Time?displacement chart of the target
根據仿真計算結果,繪制噴管沿各軸方向的速度曲線如圖9所示。
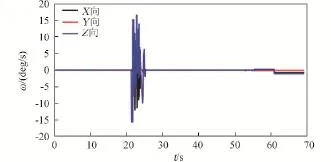
圖9 目標速度曲線圖Fig.9 Velocity chart of the target in each axis
目標噴管沿各軸的初始速度均為0,在21 s時與末端機構產生碰撞接觸,產生較大的速度波動,最大瞬時速度達到270 mm/s左右。在25 s時,機械臂完成對噴管的壓緊,使噴管沿各軸的速度基本穩定為0。25~45 s,噴管在機械臂的拖拉作用下靠近對接機構底座,速度由電機及多級絲杠機構控制。在噴管被壓緊過程中,速度依然有較小范圍的波動,主要是由于噴管被末端機構與緩沖機構緊壓在中間,而緩沖機構與抓捕機構之間有間隙存在,此間隙給了兩機構之間的彈簧一定的行程。60 s時,分離過程中彈出機構的彈出架使噴管及目標衛星獲得了一定的沿某個方向的釋放初速度。最終在此仿真條件下,徑向釋放速度約為7.42 mm/s,軸向釋放速度約為45 mm/s。通過以上仿真分析可知,分離過程中,彈出機構和目標衛星具有一定的相對速度,不會發生碰撞。
實際上由于釋放時噴管沿各軸有轉速,會造成釋放完成后噴管沿各方向的速度發生變化。故噴管釋放速度是實際應用中需重點考量的指標。
4.2 碰撞接觸力分析
對對接過程分析可知,抓捕過程中,末端機構與目標噴管碰撞時會產生較大的碰撞接觸力,可能會造成機構與噴管的破壞,因此對末端機構與噴管碰撞接觸力的研究至關重要。根據仿真計算結果,末端機構1、2、3與噴管的碰撞力曲線如圖10所示。末端1、2、3分別為三組機械臂執行機構上的末端機構。
圖中三個末端與噴管的接觸力的變化時間及最大接觸力稍有不同,是由于初始條件下噴管與對接機構約有20 mm的徑向偏差,噴管首先與末端1發生接觸碰撞,被彈開后與末端2和末端3發生碰撞,反復發生彈開與碰撞,因此接觸力曲線前端波動較為劇烈;末端相互交叉的形狀也會對碰撞形式產生影響。21 s時,噴管與末端發生接觸碰撞,碰撞接觸力有較大的波動,此時最大碰撞接觸力約380 N,發生在噴管與末端2之間;21~25 s之間,機械臂帶動末端將噴管逐漸壓緊在緩沖平臺上;至25 s,噴管與對接機構基本保持相對穩定狀態,接觸力基本保持不變,接觸力約為250 N。由于完成壓緊后緩沖平臺與抓捕機構之間的空隙不能完全消除,因此此時接觸力大小主要與緩沖機構中的彈簧力有關;從50 s開始,逐漸解除對噴管的壓緊后,末端與噴管的接觸力逐漸下降為零。通過以上仿真分析可知,噴管與對接機構有一定接觸力,但在可控范圍內,且解除壓緊后會逐漸下降為零,不會損傷噴管及對接機構。
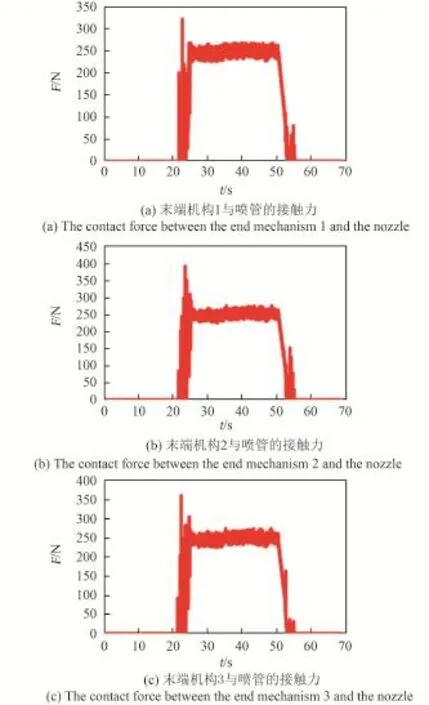
圖10 末端與噴管的接觸力Fig.10 Contact force between the end mechanism and the nozzle
4.3 各關節受力分析
機械臂是執行機構乃至整個對接機構的關鍵組成部分,而其關節處也是整個機構的主要受力點。關節力如圖11所示。圖11(a)、(b)、(c)、(d)分別表示圖3中B、C、A、D四處的關節的受力隨時間的變化情況。
由圖11可知,四處關節的受力情況略有不同,但總體來看相差不大,這也很容易通過對平行四桿機構的受力分析得知。在前21 s,各關節處受力較小且有小幅波動,主要是由于在A處安裝有扭簧,且扭簧有2 N·mm的預載荷使機械臂壓縮滾子,機械臂的上升與滾子的旋轉會使扭簧力產生輕微振蕩,從而使機械臂對滾子的壓力以及關節力產生輕微振蕩,在機械臂開始打開的過程中,扭簧力會逐漸變小而使關節受力變小。21 s左右時,末端機構與噴管的碰撞接觸會使機械臂關節力產生較大波動,其變化規律和末端與噴管的接觸力變化規律基本相同,力的大小會有不同。開始階段的碰撞伴隨著末端機構對噴管的壓緊而結束,此時關節受力的大幅值跳動也會結束,在末端機構對噴管完全壓緊的時間內,關節力保持在相對穩定的范圍內。機械臂抬起時末端機構與噴管接觸力逐漸減小,關節力也逐漸減小,恢復到與末端未接觸噴管時的受力狀態。根據仿真結果,關節處所受最大力約為23 s時的沖擊力,約為1190 N,噴管被壓緊時受力約為800 N。通過以上仿真分析得知,機械臂中各鉸鏈受到一定的關節力,但在可控范圍內,且會在解除壓緊時逐漸減小并恢復到最初受力狀態。因此,機械臂強度能夠達到要求。

圖11 機械臂中各鉸鏈處關節受力曲線Fig.11 Force curve in various joints
5 結論
1)設計了一種滿足長行程、小型化要求的非合作目標對接機構,該機構能夠實現500 mm的提升距離,能對現有研究的同步衛星噴管進行有效捕獲,由執行機構與緩沖機構聯合構成的工作空間最大直徑為229.9 mm,最小直徑為59 mm。
2)所設計的對接機構進行目標抓捕時,末端機構與目標噴管進行接觸時,目標會出現振動,并且產生較大的接觸力,對接機構各關節的受力在安全范圍之內,對接機構能夠很好地完成對非合作目標的捕獲和分離。
(
)
[1]林來興.自主空間交會對接技術進展[J].載人航天,2005,11(4):15?19.Lin Laixin.Development of autonomous rendezvous and doc?king technology[J].Manned Spaceflight,2005,11(4):15?19.(in Chinese)
[2]余江華.非合作航天器相對位姿測量方法研究[D].哈爾濱:哈爾濱工業大學,2013.Yu Jianghua.Research on Relative Position Measurement of Non?cooperative spacecraft[D].Harbin:Harbin Institute of Technology.2013.(in Chinese)
[3]Martin E,Dupuis E,Piedboeuf J C,et al.The TECSAS mis?sion from a Canadian perspective[C]//Proc.8thInternational Symposium on Artificial Intelligence and Robotics and Auto?mation in Space(i?SAIRAS),Munich,Germany.2005.
[4]Iannotta B.Sumo wrestles satellites into new orbits[J].Aero?space America,2006,44(2):26?30.
[5]Debus T J,Dougherty S P.Overview and performance of the front?end robotics enabling near?term demonstration(FREND)robotic arm[C]//Proceedings of the 2009 AIAA Infotech@ AerospaceConference.Seattle, Washington,USA:AIAA.2009.
[6]梁斌,杜曉東,李成,等.空間機器人非合作航天器在軌服務研究進展[J].機器人,2012,34(2):242?256.Liang Bin,Du Xiaodong,Li Cheng,et al.Advances in space robot on?orbit servicing for non?cooperative spacecraft[J].Robot,2012,34(2):242?256.(in Chinese)
[7]陳羅婧,郝金華,袁春柱,等.“鳳凰”計劃關鍵技術及其啟示[J].航天器工程,2013,22(5):119?128.Chen Luojing,Hao Jinhua,Yuan Chunzhu,et al.Key tech?nology analysis and enlightenment of phoenix program[J].Spacecraft Engingering,2013,22(5):119?128.(in Chi?nese)
[8]范佐.非合作目標對接機構的研究[D].哈爾濱:哈爾濱工業大學,2007.Fan Zuo.The Research on Uncooperative Target Docking Mechanism[D].Harbin:Harbin Institute of Technology.2007.(in Chinese)
[9]豐飛.非合作目標欠驅動對接捕獲機構的設計與研究[D].哈爾濱:哈爾濱工業大學,2008.Feng Fei.Dedign and Research on the Docking and Underac?tuated Capturing Mechanism for the Uncooperative Target Sat?ellites[D].Harbin:Harbin Institute of Technology.2008.(in Chinese)
[10]劉傳世.空間非合作目標對接機構的研究[D].哈爾濱:哈爾濱工業大學,2010.Liu Chuanshi.Study on the Docking Mechanism for Uncoop?erative Space Target[D].Harbin:Harbin Institute of Tech?nology.2008.(in Chinese)
[11]李隆球,張廣玉,柏合民,等.非合作目標衛星三臂型對接機構及其力學分析[J].上海航天,2015,32(1):5?11.Li Longqiu,Zhang Guangyu,Bai Hemin.et al.Design and Mechanical Analysis for a Three?arm Non?cooperative Target Satellite Docking Mechanism[J].Aerospace Shanghai,2015,32(1):5?11.(in Chinese)
[12]龐新源.非合作目標識別及多功能捕獲機構的研究[D].哈爾濱:哈爾濱工業大學,2014.Pang Xinyuan.Research of Non?cooperative Identification and Multifunctional Docking Mechanism[D].Harbin:Harbin In?stitute of Technology.2008.(in Chinese)
[13]Caswell D,Visentin G,Ortega G,et al.ConeXpress Orbital Life Extension Vehicle-a commercial service for communica?tions satellites[J].ESA bulletin,2006,127(8):54?61.
[14]Korte J J.Flow quality of hypersonic wind?tunnel nozzles de?signed using computational fluid dynamics[J].Journal of Spacecraft and Rockets,1995,32(4):569?580.
[15]Hoffman J D.Design of compressed truncated perfect nozzles[J].Journal of Propulsion and Power,1987,3(2):150?156.
[16]張雪敏.非合作目標拖拉式對接機構的研制及實驗研究[D].哈爾濱:哈爾濱工業大學,2013.Zhang Xuemin.Development and Experimental Study on the Tractive Docking Mechanism for the Uncooperative Target Sat?ellites[D].Harbin:Harbin Institute of Technology.2013.(in Chinese)

圖8 驅動力矩仿真結果Fig.8 Simulation results of the actuator torque
4 結論
本文提出一種雙四連桿串聯式展收機構的設計方案,并利用ADAMS軟件完成了展收機構優化設計,在滿足四連桿機構壓力角大于30°的約束前提下,當驅動曲柄(桿AB)與連桿(桿BC)達到死點位置時,防熱罩從初始位置(0°)剛好轉到180°。通過優化實現了防熱罩展開180°時機構處于死點位置,具備斷電保持能力,實現了優化設計目標;并獲得大慣量下的展開過程驅動力曲線,驅動機構扭矩(含減速器)最大為32.3 N·m,為驅動組件的選型提供依據。
參考文獻(References)
[1]李志杰,果琳麗,張柏楠,等.國外可重復使用載人飛船發展現狀與關鍵技術研究[J].航天器工程,2016,25(2):106?112.Li Zhiguo,Guo Linli,Zhang Bainan,et al.Study on devel?opment status and key technologies of reusable manned space? craft[J].Spacecraft Engineering,2016,25(2):106?112.(in Chinese)
[2]楊雷,張柏楠,郭斌,等.新一代多用途載人飛船概念研究[J].航空學報,2015,36(3):703?713.Yang Lei,Zhang Bainan,Guo Bin,et al.Concept definition of new?generation multi?purpose manned spacecraft[J].Jour?nal of Aeronautica,2015,36(3):703?713.(in Chinese)
[3]Lyons D T,Desai P N.Adventures in parallel processing:en?try,descent and landing simulation for the genesis and stard?ust missions[C]//AIAA/AAS AStrodynamics Specialist Con?ference;8?11 Aug.2005;Lake Tahoe,CA;United States.AAS?05?267.
[4]Desai P N,Cheatwood F M N.Entry dispersion analysis for the genesis sample return capsule[J].Journal of Spacecraft and Rockets,2001,38(3):345?350.
[5]高秀華,王云超,安二中,等.基于ADAMS的裝載機工作裝置優化[J].計算機仿真,2007,24(1):217?221.Gao Xiuhua,Wang Yunchao,An Erzhong,et al.Optimiza?tion of the working device of loader based on ADAMS[J].Computer simulation,2007,24(1):217?221.(in Chinese)
[6]郭衛東.虛擬樣機技術與ADAMS應用實例教程[M].北京:北京航空航天大學出版社,2008:56?73.Guo Weidong.Virtual Prototype Technology and ADAMS its Application Examples[M].Beijing:Beihang University Press,2008:56?73.(in Chinese)
[7]趙武云.ADAMS基礎與應用實例教程[M].北京:清華大學出版社,2012:33?52.Zhao Wuyun.Foundation and Application Examples of the ADAMS[M].Beijing:Tsinghua University Press,2012:33?52.(in Chinese)
[8]范建成,熊光明,周明飛.MCS.ADAMS應用與提高[M].北京:機械工業出版社,2006:56?58.Fan Jiancheng,Xiong Guangming,Zhou Mingfei.Application and Improvement of ADAMS[M].Beijing:China Machine Press,2006:56?58.(in Chinese)
Design and Analysis of a Long?stroke and Miniaturized Docking Mechanism
LI Longqiu1,2,SHAO Guangbin1,ZHOU Dekai1,LIU Weimin1,WANG Jingxuan1
(1.School of Mechatronics Engineering,Harbin Institute of Technology,Harbin 150001,China;2.State Key Laboratory of Robotics and System,Harbin Institute of Technology,Harbin 150001,China)
To realize the online docking and operation of failed spacecraft or space debris,a minia?turized long?stroke docking mechanism was proposed according to the requirements and the charac?teristics of the non?cooperative docking technology.The docking target was the effuse of a satellite on the GEO.The three?dimensional model of the docking mechanism was established.On the basis of the model,the range of the envelope space of the docking mechanism was determined.The kinemat?ic and dynamic simulation were performed for the docking mechanism using ADAMS to identify the dynamic characteristics of the docking process between the target satellite and the docking mecha?nism,the contact force between the effuse and the end effector and the stress on the joints during the docking process.The simulation results showed that the miniaturized long stroke docking mechanism could capture the target satellite effectively and reliably.
long?stroke and miniaturized;non?cooperative target;docking mechanism
V19
A
1674?5825(2016)06?0758?08
2016?05?10;
2016?11?03
上海市空間飛行器機構重點實驗室開放課題基金資助項目(06DZ22105)
李隆球(1982-),男,博士,教授,研究方向為航天裝備地面模擬與測試技術。E?mail:longqiuli@hit.edu.cn
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
