航天器大型柔性太陽翼撓性形變視覺測量優化設計
2016-12-24 06:53:40郎燕,于丹,劉鵬
載人航天 2016年6期
郎 燕,于 丹,劉 鵬
(1.北京控制工程研究所,北京100094;2.哈爾濱工業大學模式識別研究中心,哈爾濱150001)
航天器大型柔性太陽翼撓性形變視覺測量優化設計
郎 燕1,于 丹1,劉 鵬2
(1.北京控制工程研究所,北京100094;2.哈爾濱工業大學模式識別研究中心,哈爾濱150001)
精確辨識出太陽翼的撓性參數有助于修正太陽翼動力學模型,為航天器控制系統的優化設計提供依據。基于非接觸方式的在軌雙目視覺測量可以最大程度保留太陽翼的完整性和功能性。討論了美國、俄羅斯開展的太陽翼視覺測量在軌試驗和標志物選擇情況,針對未來航天器大型柔性太陽翼形變的在軌測量需求,設計了一種兼顧大視場和高精度的兩組雙目相機測量方案,給出了一種快速、高可靠地目標點檢測和匹配算法,仿真結果表明該算法可有效提高測量精度。針對陰影區中不同照明條件下的標志點尺寸和材料的選擇進行了試驗研究,為在軌驗證提供了依據。最后分析了不同觀測角度時目標點的測量誤差。
大型柔性太陽翼;撓性形變;在軌測量;雙目視覺
1 引言
太陽翼上的太陽能電池陣為航天器提供正常工作所必需的能源。在航天器軌道控制和姿態控制過程中,推力器或控制力矩陀螺的工作使得太陽翼會產生撓性變形[1]。隨著航天技術的發展,平臺設備和載荷設備對整星功率需求越來越大,因此太陽翼尺寸也越來越大。在整星質量和功率的雙重約束下,采用復合材料的大型柔性太陽翼已經開始應用[2],這使得航天器的撓性變形越來越大,振動基頻越來越低,對控制系統的精度和穩定性提出了更高要求[3]。而過大的太陽翼形變還可能會對太陽翼的結構造成破壞[3?4],精確辨識出太陽翼的撓性參數(如固有頻率、模態振型、阻尼等)有助于修正太陽翼動力學模型,為航天器控制系統的優化設計提供依據。由于太陽翼展開后面積大,在地面無法構建滿足尺寸要求的真空微重力環境,所以在軌測量太陽翼形變量是實現太陽翼動力學模型辨識的有效手段。
美國NASA于1998年在哈勃空間望遠鏡SM?2任務中利用視覺對哈勃太空望遠鏡太陽翼的靜態位置和動態響應進行測量。采用雙目相機拍攝圖像(靜態位置測量)或者圖像序列(動態響應特性測量),經過圖像處理和三角解算得到特征點的三維坐標[4]。類似任務還包括NASA對和平號空間站一處艙體搭載的太陽翼系統參數的在軌測量[5]。該任務使用六臺相機組成的雙目視覺系統拍攝太陽翼的根部和末端的圖像序列,利用三角解算得到目標點相對于時間的坐標序列,并利用特征系統辨識算法解出了太陽翼的系統特性,包括振動頻率與阻尼等物理量[4]。
對于在軌試驗中待觀測太陽翼標志物特性的選擇也有可供參考的研究結論。一種常見的方法是將反射性材料(如角反射器)制成的目標點貼在被測材料上[6],成像時這些點會在圖像中成為白色亮點,計算時利用這些亮點進行匹配。但這一方法的缺點是對光照敏感,只有入射光與相機的光軸的夾角較小時才能獲得良好對比度的圖像,否則會無法識別。另一種人工標記點是使用白色材料,例如普通的白紙:地面測試表明采用白紙能夠取得較好的效果,不會在相機光軸與入射光夾角較大時無法檢測到目標[7]。此外,結構光測量的方法也被用于目標點的生成,即用投影設備將目標點投射在被測材料上進行測量[8],這一方法不會對被測材料產生影響,但是只適用于漫反射材質,且透射率和吸收率小的被測材料。
已報道的空間試驗都采用了典型的雙目視覺測量方法。由于太陽翼材料和結構的特殊性,使用接觸式測量的方法(如加速度傳感器)會導致電氣結構復雜,檢測位置少,同時給太陽翼帶來明顯附加質量[4]。使用基于視覺測量的非接觸式方法,通過獲知太陽翼上人工標志點或其自身的紋理位置來判斷形變大小,這種測量方式對被測對象的影響最小,能夠在最大程度上保留太陽翼的完整性和功能性[5]。
針對我國未來大型柔性太陽翼形變的在軌測量需求,本文提出一種基于大、小視場的兩組雙目視覺相機的測量方案,分別觀測太陽翼的不同區域:小焦距相機組拍攝太陽翼近端圖像,大焦距相機組拍攝太陽翼遠端圖像,拍攝到的兩組圖像能夠覆蓋整個太陽翼。從而兼顧大視場和高精度。為提高雙目相機的在軌測量計算速度和可靠性,給出一種新的目標點檢測和匹配方法,以提高太陽翼變形的測量精度。針對陰影區下不同照明條件下標志點的尺寸和材料的選擇進行試驗,并推導了不同觀測角度時目標點的測量誤差。
2 太陽翼形變視覺測量方案
2.1 雙目相機的布局
對于單側尺寸為12 m×5 m的大型柔性太陽翼陣面,試驗條件列于表1。
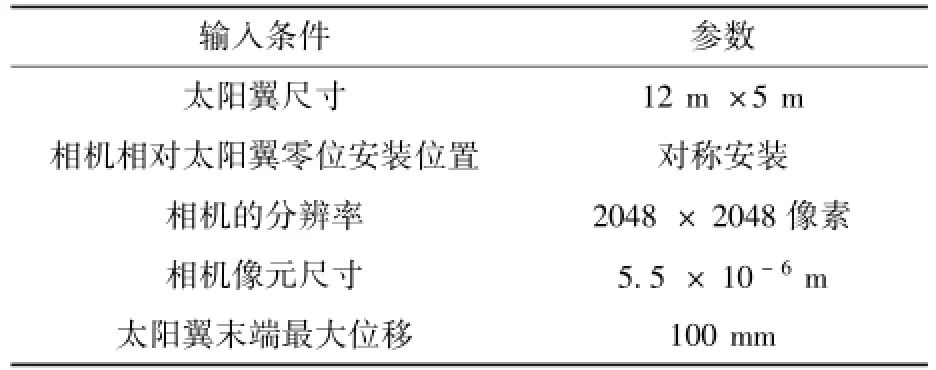
表1 試驗輸入條件Table 1 Simulation parameters
雙目相機的布局原則包括以下幾點:
1)標志點盡量在圖像的中央,減少鏡頭光學畸變的影響;
2)每組相機左右圖像應保證較大的公共區域;
3)保證近場和遠場圖像也存在適當的公共區域,便于在太陽翼形變時視覺測量仍能覆蓋太陽翼的全部區域;
4)近場圖像可計算的目標點個數和遠場圖像可計算的目標點個數之和需大于標志點數量;
5)在太陽翼繞根部旋轉±1°時,仍保證以上性質。
編寫仿真程序,輸入相機參數與太陽翼參數生成理想的拍攝圖像,最終得到了表2所示的合適的相機內外參數,仿真圖像結果如圖1所示。
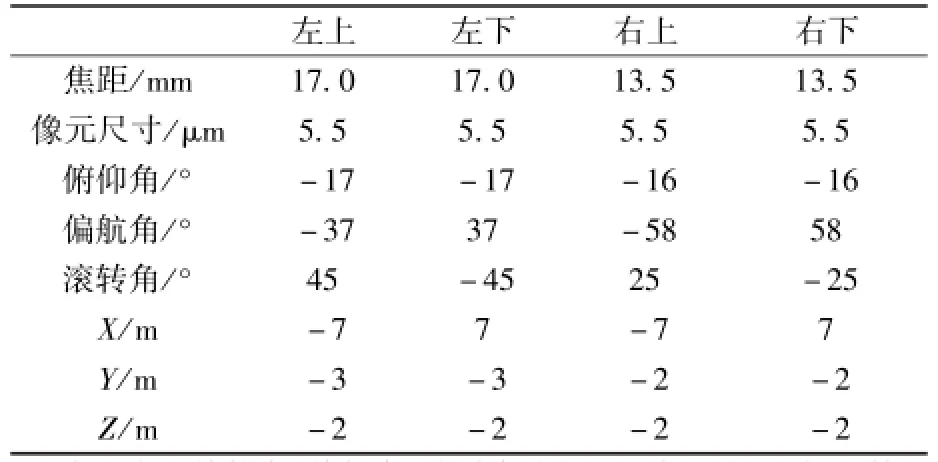
表2 相機優化布局結果Table 2 Optimal camera configurations
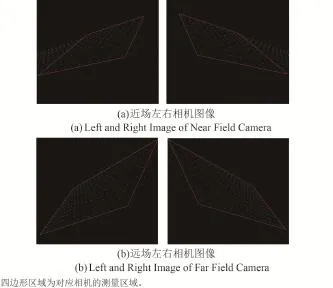
圖1 太陽翼上標志點仿真成像圖像Fig.1 Imaging simulation of markers on solar arrays
2.2 標志點檢測和提取優化算法
針對圖1的仿真圖像,可結合相機內外參數解出各個點的三維坐標[9?11]。給定相機參數和仿真圖像,計算標志點三維坐標的基本步驟為:1)在圖像上計算出各個標志點幾何中心的圖像坐標(目標點檢測);2)根據極線約束匹配左右圖像目標點(目標點匹配);3)三維坐標重構。
2.2.1 標志點檢測
根據本試驗先驗知識:標志點之間的距離已知。因此采用預報?校正法來提取目標點。
計算標志點在圖像中坐標的步驟如下:
1)如圖2所示,假設三個點X1、X2、X11為太陽翼處于任何位置時變形最小的點,它們在近場左相機圖像上的像點分別為x1、x2、x11。根據標定的左相機外參數、內參數和目標點在全局坐標系中的坐標位置,估算x1、x2、x11在圖像中的三個初始估計位置。分別在三個初始位置附近用25×25的高斯模板搜索目標點,并計算匹配區域的質心坐標,記為和(為了計算方便,X1、X2、X11選擇圖像上部分的點。)
2)計算直線x1x2的方程,記為y=l1x+b1,計算x1、x2兩點在圖像上水平方向的增量Δx1=x2-x1。
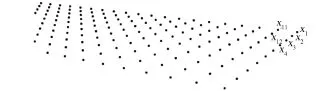
圖2 近場左相機中目標點檢測Fig.2 Marker recognition of the left near field camera
3)在圖像上估計x2點的位置。計算+Δx1和以為中心計算15×15窗口區域的質心,記為
6)在圖像上估計x3的位置。計算和以為中心計算15×15窗口區域的質心,記為
8)更新直線方程和水平方向位移量。用點(x′3,y′3)和(x′2,y′2)更新直線方程y=l3x+b3和位移量Δx′3=x′3-x′2。
9)用上述方法計算當前行上其他點在圖像上的位置坐標,如果在搜索過程中失敗,用直線估計位置點作為目標點檢測位置。
10)估計下一行第一個點的方法與水平方向估計第二個點的方法相同,即估計x11位置使用的方法與在水平方向上估計x2位置的方法相同。
11)在下一行第一個點和第二個點之間的直線方程使用上一行第一個點和第二個點之間的直線平移到下一行第一個點的直線方程替代,即x11x12與x1x2平行。
12)下一行其他點位置的方法與估計上一行其他點位置的方法相同。
用這種方法,可以得到兩幅圖像所有標志點的圖像坐標。該方法的優點為:
1)計算速度快。每一個標志點質心位置的計算都是將已經得到的標志點的質心位置及其在圖像上的直線關系作為先驗知識的,搜索在較小的區域中進行。2)可靠性高。在局部范圍內太陽翼變形量較小,連續三個標志點近似在一條直線上的假設是成立的。另外,在太陽翼展開過程中標志點脫落或移位,該方法仍然有效。
2.2.2 標志點匹配
根據極線幾何的知識,求出基礎矩陣F,計算左右圖像的對應點xl、xr是否滿足其中等于零的條件在實際中可放寬為小于某個閾值。用這樣的方法,匹配出兩圖像中的對應點。
在實際測量中,基礎矩陣F在相機標定時可直接求解,并作為參數裝訂到視覺測量系統中,不需要在軌計算。設令標志點數量為N,求解以下方程組便可解出基礎矩陣F。

在圖像上對點的檢測存在噪聲是典型的情形。通常情況下,正確的點應該在檢測點附近,,但
校正前后測量精度的對比列于表3中。在校正前,測量精度隨圖像中噪聲能量的增加快速下降,校正后,測量精度得到明顯改善,特別是在噪聲能量較大時這種改善效果更加明顯。
2.2.3 兩組雙目相機系統中標志點的提取
基于太陽翼根部在任何情況下變形較小的假設,預報?校正法檢測目標點對于太陽翼根部的圖像是完全適用的。然而對于末端的兩幅圖像,由于發生形變時標志點本身的位置相對于根部有較大變化,因此直接使用零位坐標應用預報?校正法可能會有較大的誤差,甚至檢測不到目標點。對于這個問題,可以利用遠近場圖像存在較大公共區域這一特性,使用如下方法進行標志點檢測:
1)首先計算出近場兩幅圖像重疊區域所有標志點的三維坐標。
2)選擇近場圖像和遠場圖像重疊區域中的一組滿足直角關系的三個目標點。用近場雙目視覺相機計算這三個標志點在太陽翼坐標系中的坐標。例如圖3左圖選擇的三個點。
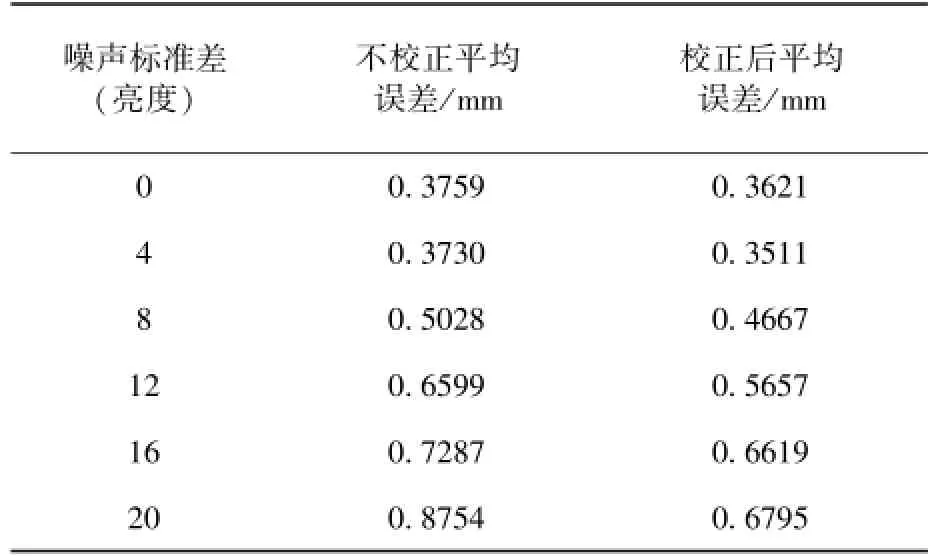
表3 校正對測量精度的改進Table 3 Effects of calibration on measurement accuracy
3)根據遠場相機的內外參數,以及三個標志點在太陽翼坐標系下的坐標,經過反向投影得到這三個標志點在遠場相機圖像中的初始位置,如圖3右圖所示。
4)利用這三個圖像坐標作為預報?校正法的起始參考點,計算出遠場圖像其余標志點的圖像坐標。
同理,計算出右相機圖像對應的目標點,根據三角解算重構出這些標志點的三維坐標,結合近場相機得到的坐標,便可得到太陽翼上所有標志點的坐標。該方法在太陽翼零位以及末端位移不超過100 mm的情況中得到了準確的測量結果。
2.3 照明條件與標志點材料的選取
為了避免雜光影響,考慮在陰影區進行雙目相機的測量。確定合適的照明條件以及良好的標志點材料是必要的。針對這一需求,進行了相關試驗,通過使用不同功率的LED照明以及不同材料的標志點,確定了優化的照明+標志點組合。
試驗選擇在夜晚進行,光源、相機和標志的空間位置如圖4所示。
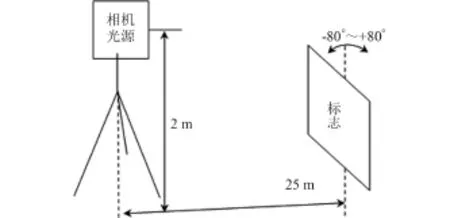
圖4 實驗器材布局Fig.4 Layout of equipment in the experiment
候選的材料包括:3M反光膜、玻璃微球反光帶、白紙、白色硅膠,其中3M反光膜和玻璃微球反光帶都用反光粉作為反射材料,反光粉的成分包括SiO2、CaO、Na2O、TiO2、BaO等。將候選材料裁剪成圓形和方形貼在太陽翼表面材料(Kapton薄膜)上,布局如圖5所示。
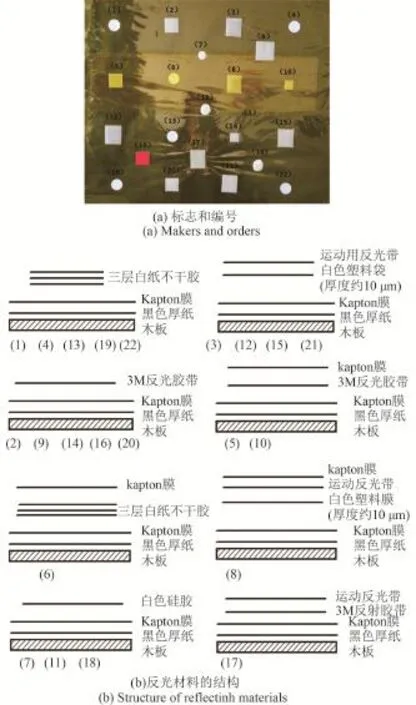
圖5 標志點布局和材料Fig.5 Layout and material of the markers
圖6給出了成像試驗結果。其中,(a)為標志板在0°位置拍攝的局部放大圖像,距離25 m,白紙標志和硅膠標志沒有成像,3M反光膠帶成像較暗,玻璃微球反光帶清晰成像。(b)為標志板在-30°位置拍攝的局部放大圖像,距離25 m,白紙標志和硅膠標志沒有成像,3M反光膠帶成像較暗,運動用反光帶清晰成像,表面覆蓋一層kapton膜的反光帶亮度變的更暗,其他反光帶的亮度也下降了。(c)為標志板在-60°左右位置拍攝的圖像和局部放大圖像,距離25 m,白紙標志和硅膠標志沒有成像,3M反光膠帶不能可辨識地成像,運動用反光帶可以成像,表面覆蓋一層kapton膜的反光帶亮度變的幾乎不可見,其他反光帶亮度也下降了,但可辨識。(d)為標志板在-80°左右位置拍攝的圖像,所有標志點都不能成像。
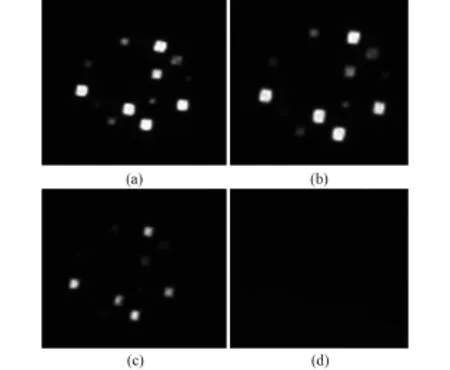
圖6 成像實驗結果Fig.6 Experimental results of imaging
試驗結果表明,使用11W LED作為光源,當光軸與目標坐在平面法線夾角60°以內時,玻璃微球反光帶可以成像,3M反光膠帶成像的角度范圍小,其他材料標識器不能成像。對于LED光源,每瓦需要提供6 cm2的散熱。
2.4 標志點大小估計
由于目標點具有一定質量,所以需要盡量減少目標點的體積以降低附加質量對太陽翼材料的影響,同時也需要保證在拍攝的圖像中能夠檢測到目標點,不至于目標點太小而造成較大誤差。因此需要找到一個適當的標志點半徑,使得在生成的圖像中最小的橢圓短軸在10個像素左右。
通過仿真實驗,指定標志點半徑,在標志點圓周上指定一些點,經過透視投影變換,得到圖像上取點的分布,統計橢圓長軸和短軸近似的最大值和最小值。仿真結果表明,標志點半徑為10 cm時,橢圓短軸長大約占8個像素,符合限制條件。
進一步,在真實的情況下還可以通過減小標志點的數目、改變標志點間距等方法降低標志點質量對太陽翼的影響。
2.5 標志點檢測誤差
目標點為圓形,經透視投影變換后,在圖像中以橢圓的方式體現。根據文獻[8],圖像上橢圓的中心和圓形標志點的中心在圖像上的投影并非是重合的。因此,透視投影變換下圓形標志點在像平面上的畸變誤差也需要考慮。
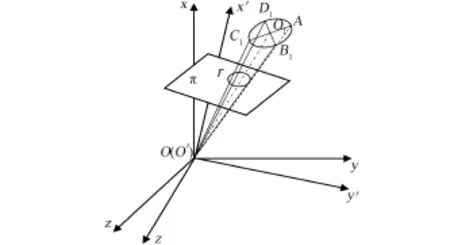
圖7 空間橢圓透視Fig.7 Spatial elliptical perspective
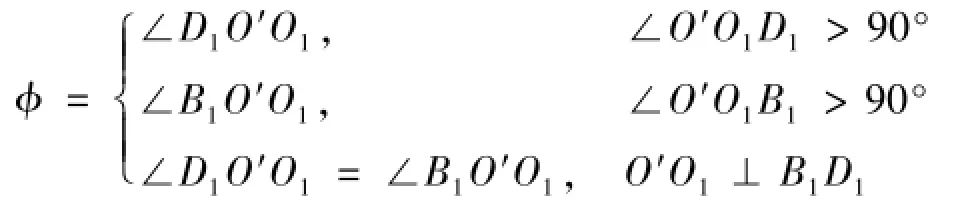
如圖7所示,橢圓O1A1B1C1D1在平面π上的投影為橢圓Γ,相機焦距f,坐標系Oxyz與O′x′ y′z′間通過旋轉矩陣R=[ri](i=1,2,…,9)變換,α、β、γ為O′O1在O′x′y′z′的方向角,φ為O′B2與x′正方向逆時針夾角,同時設θ=∠A1O′O1=∠C1O′O1,定義?角如下式:
橢圓Γ的方程為下式:
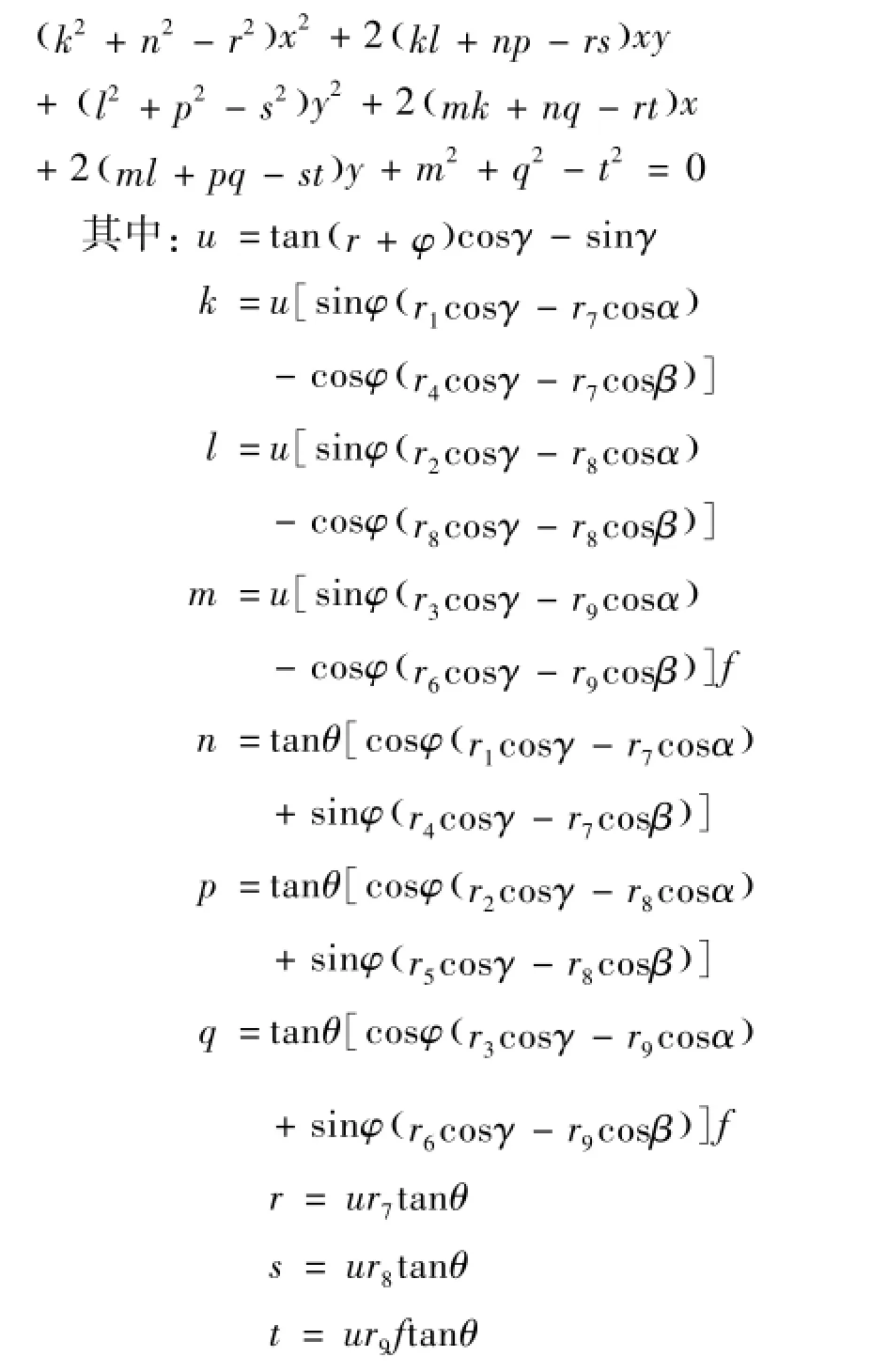
因此中心坐標為:
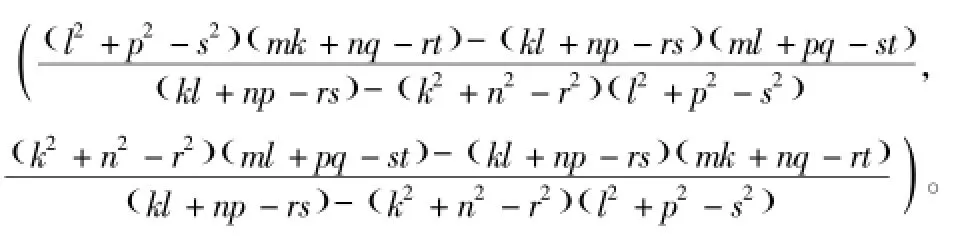
由于這里橢圓所占的像素面積較小,采用質心法求取橢圓的幾何中心,并假設這種方法的結果就是上述求得的坐標值。而空間橢圓O1A1B1C1D1的中心O1在平面π上的投影坐標為:
可以看出空間橢圓中心的投影和投影橢圓的中心存在偏差,設這種畸變誤差為二者坐標的歐氏距離,通過計算可知當空間橢圓與圖像平面的夾角為0°、99°、180°時,畸變誤差為零。此外圓形目標成像后,圖像上橢圓越小,畸變誤差就越小。所以,應該結合照明條件、圖像處理方法對標志點的檢測能力等因素選擇適當的標志點尺寸。在本文的仿真實驗中,使用直徑為10 cm的圓形標志點,成像后得到橢圓,畸變誤差小于0.2個像素。
3 結論
通過在太陽翼上粘貼利用運動反光材料制成的標志點,并加以合適的照明條件,在黑暗條件下拍攝的圖像中可以識別出各個標志點。根據誤差分析的結果,左右相機的基線距為14 m時,可以得到較準確的測量結果。選擇直徑為100 mm的標志點,以本文說明的相機參數配置,成像目標的直徑約為8個像素,可以被檢測。通過檢測到的標志點在圖像中的坐標,利用雙目視覺原理可以算出標志點的三維坐標,從而可以獲得太陽翼的形變情況。
(
)
[1]屠善澄.衛星姿態動力學與控制(1)[M].北京;中國宇航出版社,1999:162?163.Tu Shancheng.Satellite Attitude Dynamics and Control(1)[M].Beijing:China Aerospace Press,1999:162?163.(in Chinese)
[2]楊巧龍,任守志,王舉,等.柔性太陽翼技術發展現狀及其關鍵技術研究[C]//可展開空間結構學術會議,西安;2014.Yang Qiaolong,Ren Shouzhi,Wang Ju,et al.Research on the development status and key technology of flexible solar wing technology[C]//Deployable Space Structure Confer?ence,Xi'an;2014.(in Chinese)
[3]許英健.航天器太陽翼動態影響測量系統的研究與設計[D].上海:上海交通大學,2012.Xu Yingjian.Research and Design of Dynamic Measurement System for Spacecraft Solar Wings[D].Shanghai:Shanghai Jiao Tong University,2012.(in Chinese)
[4]Sapp C A,Dragg J L,Snyder M W,et al.Photogrammetric assessment of the hubble space telescope solar arrays during the second servicing mission[R].NASA/TP?98?201793,NAS 1.60:201793,S?839,1998.
[5]Gilbert M G,Welch S S,Pappa R S,et al.STS?74/MIR photogrammetric appendage structural dynamics experiment preliminary data analysis[J].AIAA?1997?1168,1997.
[6]Juang J N,Pappa R S.An eigensystem realization algorithm for modal parameter identification and model reduction[J].Journal of Guidance,Control,and Dynamics,1985,8(5),620?627.
[7]Giersch L R M.Pathfinder photogrammetry research for ultra?lightweight and inflatable space structures[R].NASA/CR?2001?211244,NAS 1.26:211244,2001.
[8]P Pappa R S,Black J T,Blandino J R,et al.Dot?projection photogrammetry and videogrammetry of gossamer space struc?tures[J].Journal of Spacecraft and Rockets,2003,40(6):858?867.
[9]張廣軍.機器視覺[M].北京:科學出版社,2005:99?122.Zhang guangjun.Machine Vision[M].Beijing:Science Press,2005:99?122.(in Chinese)
[10]Zhang G,Wei Z.A position?distortion model of ellipse centre for perspective projection[J].Measurement Science and Technology,2003,14(8):1420.
[11]馮文灝.近景攝影測量[M].武漢:武漢大學出版社,2002:60?213.Feng Wenhao.Close?range Photogrammetry[M].Wuhan:Wuhan University Press.2002:60?213.(in Chinese)
[12]Gonzalez R C,Woods R E.Digital Image Processing[M].北京:電子工業出版社,2011:20?245.
Optimization Design of On?orbit Vision Measurement in Spacecraft Large Flexible Solar Arrays Deformation
LANG Yan1,YU Dan1,LIU Peng2
(1.Beijing Institute of Control Engineering,Beijing 100094,China;2.Harbin Institute of Technology,Pattern Recognition Research Center,Harbin 150001,China)
The precise identification of the flexible parameters of the solar arrays is helpful to modify the dynamic model of the solar arrays,which will provide a basis for the optimization design of the spacecraft control system.On?orbit binocular vision measurement based on non?contact mode can keep the integrity and function of the solar arrays to the maximum extent.First,the on?orbit solar arrays vision measurement experiments and the selection of markers in the United States and Russia were discussed in this paper.According to the needs of future spacecraft on?orbit measurement of large flexible solar array deformation,a two groups of binocular camera measurement scheme with large visual field and high precision was proposed,and a quick and reliable marker detection and matching algorithm was provided.The simulation results showed that the proposed algorithm could effectively improve the measurement accuracy.Then,experiments on the marker size and material were carried out with different lighting conditions in the shadow area which could provide a basis for the on?orbit verification.Moreover,the measurement error of the markers at different observation an?gles was analyzed.
large flexible solar arrays;flexible deformation;on?orbit measurement;binocular vision
V448.25
A
1674?5825(2016)06?0781?07
2016?05?27;
2016?11?10
國家自然科學基金(61672190)
郎燕(1981-),女,博士,高級工程師,研究方向為航天器控制系統設計。E?mail:yan.lang@126.com
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
