三維激光掃描技術在古建筑模型重建中的應用
2016-12-26 08:21:42彭文博楊武年
地理空間信息 2016年3期
彭文博,楊武年,王 鵬
(1. 成都理工大學 地學空間信息技術國土資源部重點實驗室,四川 成都 610059)
三維激光掃描技術在古建筑模型重建中的應用
彭文博1,楊武年1,王 鵬1
(1. 成都理工大學 地學空間信息技術國土資源部重點實驗室,四川 成都 610059)

以四川省閩良市某古建舍利塔為研究對象,使用FARO SCENE、Geomagic 2013、Photoshop CS3和3dsMax 2012等數據獲取和處理軟件生成逼真的舍利塔三維模型,為三維激光掃描技術在古建筑物保護和維修方面的應用提供了參考和借鑒。
三維激光掃描;古建筑保護;三維重建;GIS
古建筑作為特殊的文化信息載體[1],在一定意義上,見證了一個時代的變遷,一旦破壞,就再難以接續和修復。對古建筑進行三維重建是古建筑保護的有效手段[2]。三維空間信息數據的快速獲取是制約古文物三維重建的一個難題。三維空間信息的獲取其實質是空間定位數據的采集[3]。傳統的三維空間數據獲取方法多為單點數據獲取[4],其獲取的數據精度雖高,但耗時耗力,數據更新慢,難以滿足信息快速發展的需求。三維激光掃描系統集成多種高新技術的三維坐標測量儀器,采用非接觸式高速激光測量方式[5],可快速獲取被測目標表面的陣列式幾何圖形的點云數據,可快速應用于城市建筑三維重建和局部信息的空間信息獲取,是目前測繪發展的一個重要方向。本文結合三維激光掃描的基本工作原理及實施過程,以某摩崖造像舍利塔為例,探討了三維激光掃描技術在文物建筑保護中的應用[6],給出了三維激光掃描數據采集、數據處理和模型構建的具體步驟。
1 三維激光掃描測量系統
三維激光掃描是以獲取掃描對象表面點云的方式來采集物體表面的空間坐標的。地面三維激光掃描測量系統由地面三維激光掃描儀、后序處理軟件、電源以及附屬設備構成[7],它具有與掃描儀器相關的特定的坐標系統,稱為儀器坐標系統。如圖1所示,儀器坐標系統同樣分為X、Y、Z三個坐標軸。坐標原點即激光發射點,Z軸向上為正,位于儀器的豎向掃描面內;X、Y軸都位于儀器的橫向掃描面內;X軸與Z軸、X軸與Y軸分別相垂直,且X軸與Y軸構成右手坐標系,該坐標系中,Y軸正方向一直指向被掃描對象。
該系統中的掃描儀主要包括激光測距系統、掃描系統和支架系統,同時集成數字攝影和儀器內部校正等系統[8]。測量時采用高速激光測時、測距的方法獲取點云坐標:首先,已知測量系統發射的激光束的水平角度α和垂直角度θ;然后計算脈沖從發射脈沖到接收反射回來的脈沖時間間隔t,進而計算距離S;最后從獲取掃描反射接收的激光強度,對掃描點進行顏色灰度的匹配,可計算得到掃描點P(X,Y,Z)的三維坐標為:
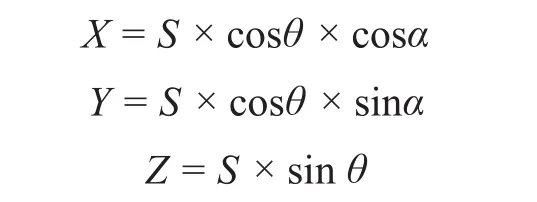
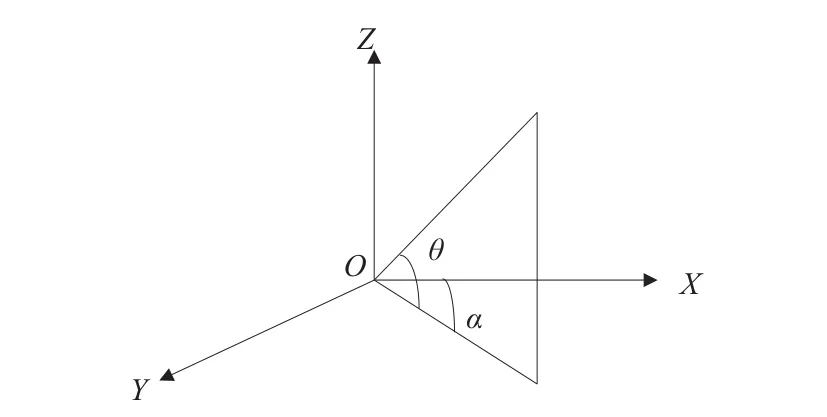
圖1 三維坐標獲取圖
近年來,三維激光掃描通過與慣性導航系統(INS)、全球定位系統(GPS)、電荷耦合(CCI)等技術相結合已經在測繪領域中應用得越來越廣泛,如城市三維重建、滑坡泥石流監測、變形監測等。此外,三維激光掃描技術在礦山測量、礦產儲量分析、高山冰雪融化監測、高山與斜谷測土等方面也發揮了重要作用。
2 三維激光掃描工作流程
三維激光掃描的主要工作流程為制定嚴密的內業計劃、現場勘查與定點、實施掃描、點云數據處理與三維建模。在具體實施之前應根據掃描對象的不同和數據采集精度要求,設計合適的掃描路線、測站數、大致的設站位置[9],確定合理的掃描距離和采樣密度等。數據獲取主要包括掃描對象點云數據的采集和影像數據的采集等。點云數據質量的好壞直接關系到后期數據處理的效果,因此在數據獲取階段還要初步驗證點云數據的準確性。數據處理階段主要是點云數據的預處理,如各測站點云數據拼接、去噪、簡化、封裝等。本次數據主要采用FARO SCENE、Geomagic、Photoshop和3dsMax 2012等軟件進行處理,這就需要數據處理人員不但要具有一定的測量知識,還要具備一定的三維建模能力。
3 三維激光掃描在古建筑保護中的應用
3.1 古建筑點云數據的獲取
以四川省某處摩崖舍利塔為例,本次掃描采用FARO Focus3D 120三維激光掃描儀和配套軟件進行數據采集。由于舍利塔本身體型不算大,故本次掃描過程設置3個測站,采樣密度設為10 m處6 mm;為了保證各站點云數據拼接的精度,設站時應盡可能保證站與站間掃描區域不低于10%的掃描重疊度。此外,由于該掃描對象處于旅游觀賞區,故掃描時間選擇在游客密度相對較少,遮擋相對小的時候進行。點云數據拼接后的效果如圖2。

圖2 舍利塔整體拼接圖
3.2 古建筑建模
在進行古建筑三維建模時,利用點云數據可逼真地表現實體的空間形體特征;但要準確描述目標的細節特征,還需要構建精細的TIN三角網模型,在建立目標物的TIN模型時,需進行點云預處理,如點云去噪、封裝、修復漏洞和紋理映射等。
1)點云拼接[10]。作為三維重建的基礎數據,點云的精度決定了三維重建的精度,本次數據拼接是將3 個測站有一定重疊度的點云拼接成一個整體數據。
2)聯合點對象,是將拼接后3個測站的點云模型聯合成一個點云模型。該操作可以便于后續的采樣、封裝等。
3)點云去噪和體外孤點。掃描目標物獲取的原始點云數據分布散亂,這是因為在數據掃描的過程中,任何無關的動作,如激光儀的輕微震動、激光散射、光線變化、人流樹葉的遮擋等都會使測量得到的點云數據中出現噪聲點、粗差點等,因此去噪和體外孤點對數據中的噪聲剔除尤為重要。
4)統一采樣。獲取舍利塔點云數據時,采用的是分站式掃描,站與站之間的數據存在不低于10%的數據重疊度,使得各站獲得的點云數據間有一定的數據冗余,因此在構建三維模型時需以某一閾值進行重采樣,這樣可以保證在不影響整體數據精度的前提下減少點云數量,便于刪除重疊點云和稀釋點云,采樣后還可以提高數據處理時的運算速度。
5)封裝和漏洞修復。統一采樣后得到的三維點云模型并不能真實表現研究對象的實體表面,需要將這些空間離散點構建成三角網,以恢復研究對象表面復雜的拓撲關系。對于此,封裝就是一種簡單實用的方法。在數據采集過程中,由于舍利塔的傘狀結構,使得舍利塔的頂部有些地方無法獲取點云信息,造成局部點云數據的缺失,導致數據漏洞。在建模過程中需進行“補洞”,使研究對象的三維模型完整表達出來。舍利塔模型修復的效果如圖3所示。

圖3 舍利塔點云修復圖
6)紋理貼圖。紋理映射的主要目的是建立三維幾何模型與影像之間的紋理關系,即建立幾何模型上各三角形頂點與影像像素之間的對應關系[11]。將數碼相機獲取的影像數據賦給已經建立的研究對象的三維模型,使得三維模型表面具有真實的紋理信息。數碼相機獲取的影像數據不是正射圖,使得已有紋理信息與實際信息出現偏差。為了改善這種紋理貼圖偏差,需要對照片進行處理校正,轉化為正射投影圖后再進行紋理映射。該舍利塔局部紋理映射效果如圖4所示。
4 結 語
以某摩崖造像舍利塔為例,本文詳細闡述了基于三維激光掃描技術的古建筑三維模型重建,準確地獲取了該舍利塔的三維空間數據和影像數據,給出了該舍利塔的三維模型效果圖,并總結了實際操作過程中出現的一些問題。
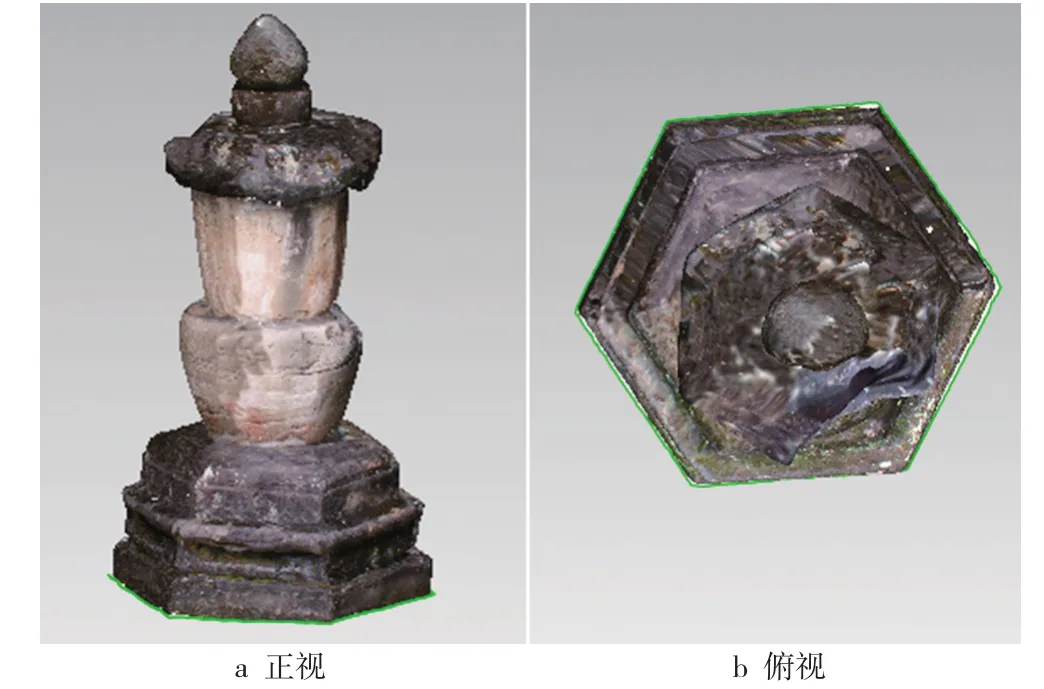
圖4 舍利塔紋理貼圖效果圖
1)掃描階段,要根據掃描對象所處實際地理位置進行細致安排,如該舍利塔地處旅游景區,選擇在客流量相對少時進行掃描;此外,為保證數據質量,在確保精度的基礎上減少數據冗余,應合理設置測站數和各測站點位置。同時,為了得到更為完整的點云數據,需結合近景攝影測量以彌補掃描時細節部分的缺失。
2)數據處理時,應根據相應模型質量要求合理安排相對處理因子,如統一采樣間距、體外孤點敏感性設置等;在實際操作中,將三維激光掃描儀和高精度數碼相機相結合,完整表達出該古建筑的三維模型。同時在進行紋理映射時,可能會因為有限的影像分辨率出現紋理拉伸,使得無法逼真呈現目標物的紋理信息,因此處理過程中將圖片轉換為正射投影圖后再進行紋理貼圖,能明顯改善紋理偏差。
[1] 刑昱,范張偉,吳瑩.基于GIS與三維激光掃描的古建筑保護研究[J].地理空間信息,2009,7(1):88-91
[2] 張鍵,董玉華.基于三維激光掃描技術的大型古建筑精細三維重建[J].河南城建學院學報,2013,23(2):58-62
[3] 劉春,劉偉.三維激光掃描對構筑物的采集和空間建模[J].工程勘察,2006(4):49-53
[4] 李長春,薛華柱,徐克科.三維激光掃描技術在建筑物模型構建中的應用與實現[J].河南理工大學報:自然科學版,2008,27(2):193-199
[5] 鄭德華,雷偉剛.地面三維激光影像掃描測量技術[J].鐵路航測,2003,29(2):26-28
[6] 湯羽揚,杜博怡,丁延輝.三維激光掃描數據在文物建筑保護中應用的探討[J].北京建筑工程學院學報,2011,27(4):4-9,36 [7] 吳靜,靳奉祥,王建.基于三維激光掃描數據的建筑物三維建模[J].測繪工程,2007,16(5): 57-60
[8] 李鵬,張文兵,李靜.三維激光掃描測量技術[J].科技信息,2009(31):832-834
[9] 周華偉,朱大明,瞿華鎣.三維激光掃描技術與GIS在古建筑保護中的應用[J].工程勘察, 2011(6):73-77
[10] 李用強,劉會云,馮梅,等.大型古建筑文物三維數字化保護研究——以白馬寺齊云塔為例[J].河南理工大學學報:自然科學版,2012,31(2):186-190
[11] 王昌翰,向澤君,劉潔.三維激光掃描技術在文物三維重建中的應用研究[J].城市勘測,2010,12(6):69-70
P208
B
1672-4623(2016)03-0094-03
10.3969/j.issn.1672-4623.2016.03.030
彭文博,碩士,研究方向為攝影測量與遙感。
2015-01-23。
項目來源:國家自然科學基金資助項目(41372340)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03