基于轉動慣量轉移的農用冷藏物流車動態穩定特性研究及控制仿真*
2016-12-30 01:46:07周志國方棟華方劍烽喻學才
武漢理工大學學報(交通科學與工程版) 2016年6期
周志國 方棟華 方劍烽 喻學才
(浙江交通職業技術學院汽車學院1) 杭州 311112) (浙江師范大學工學院2) 金華 321004)
基于轉動慣量轉移的農用冷藏物流車動態穩定特性研究及控制仿真*
周志國1)方棟華1)方劍烽1)喻學才2)
(浙江交通職業技術學院汽車學院1)杭州 311112) (浙江師范大學工學院2)金華 321004)
基于整體運動學模型,建立了農用冷藏物流車模型及其狀態方程,并對其動態特性進行數學分析,運用整車轉動慣量辨識分析算法,對車載貨物重心位置變化引起的整車轉動慣量進行辨識評估;基于MATLAB平臺對車輛動態穩定性能進行時域和頻域仿真分析.仿真結果表明,該方法可以得到車載貨物重心位置變化對車輛動態穩定特性的影響結果.
現代物流;主動安全;模型分析法;動態穩定特性;計算機仿真
0 引 言
現代高速農用物流冷藏物車因為車載貨物重心位置變化容易引起整車轉動慣量轉移,進而給車輛動態穩定特性造成嚴重影響.文獻[1-3]提出需要針對冷藏物流運輸車的特殊需求進行新的結構設計和優化.由于箱式物流運輸車車速的提高對車輛的穩定控制系統也提出了更高的要求,需要在車輛轉向系統上有新的技術要求[4-5].同時,隨著車載電控系統技術的發展,對物流運輸車穩定性電控系統進行設計和開發也是研究的一個方向[6-7].
但是,車輛運行速度作為影響農用冷藏物流運輸車效率的主導因素之一,而冷藏物流車車載貨物的重量和重量分布情況具有很大的不確定性,這種不確定性會引起車輛的重心和轉動慣量發生變化,從而對車輛的動態穩定性產生較大的影響,目前成為又一個新的研究重點和難點.因此,為了降低車載貨物對車輛穩定性的影響,文中提出基于轉動慣量轉移對冷藏物流車動態穩定特性進行研究.
1 車輛模型
選取應用較多的4×2箱式冷藏物流運輸車作為研究對象,為了研究車載貨物重心轉移對車輛轉動慣量的影響,分析轉動慣量大小和位置的變化對整車動態穩定性的影響,建立車輛整車運動學模型.
(1)
式中:mveh為整車質量;MZi為整車轉動慣量矩;ωr為車聲橫擺角速度;FXi為車輛縱向作用分力;FYi為車輛側向作用分力;Iz為橫擺轉動慣量.
為了便于分析車輛重心位置轉移與整車轉動慣量變化之間的關系,以及引起的車輛動態穩定特性的變化,忽略車輛地面切向力對輪胎側偏特性的影響,忽略空氣動力對車輛的作用,忽略車輛由于載荷變化引起的輪胎動力學特性的影響以及車輛回正力矩的影響等,對方程(1)中的車輛模型進行簡化得到2自由度單軌車輛模型,見圖1.

圖1 單軌車輛模型
由圖1可知2自由度單軌車輛模型為
(2)
式中:v為車輛側向速度;u為車輛前進速度;a為前軸到質心距離;b為后軸到質心距離;δf為前輪轉角;kaf為前輪側偏剛度;kar為后輪側偏剛度.
動態系統狀態方程是對系統進行時域和頻域分析的經典分析和描述方式,令
(3)
則方程(2)可轉換為狀態方程,即
Y=CX+DuIn
(4)
式中:
;

2 整車轉動慣量計算方法
車輛的轉動慣量對整車的操縱穩定性、制動性和行駛平順性有很大的影響,對于一般剛體,根據理論力學的原理,其對某一軸線XG的轉動慣量就是剛體中各個質點質量mGi與其到該軸的距離rGi的平方之乘積的累積值,其計算式為
(5)
在計算汽車的轉動慣量時,理論上可以定義車輛是一個連續的剛體,但是,汽車本身又是一個不均勻的、空間分布比較復雜的結構體,因此,很難采用上述理論方法積分得到車輛的轉動慣量.但是,對應設計好的車輛,其轉動慣量也隨之確定了,因此,工業上通常采用實驗測試法和經驗公式法來確定車輛的轉動慣量.
這里重點討論經驗公式法[8-9],這是一種建立在大量實驗數據基礎之上計算整車轉動慣量的方法,方法如下.
(6)
IXG=KmL2
(7)
(8)
式中:K和K1為經驗系數.
式(6)只有在很特殊的情況下才可以使用,針對冷藏物流運輸車的載荷分布情況,見圖2,這里選取式(7)作為計算基礎經驗公式.

圖2 農用冷藏物流車載荷分布示意圖
由圖2可知,由于對于自重引起的車輛轉動慣量和質心位置在運行過程中變化比較小,可以采用已測試數值,而對于車載貨物的轉動慣量和質心位置則會隨著實際情況的變化而發生較大變化,這也是引起整車轉動慣量和質心位置變化的重要因素,因此,將這2部分載重量進行分離計算,則有
(9)
(10)
則可得整車轉動慣量變化值為
(11)
整車質心位置距離前軸變化值為
Δa=a-a′
(12)
3 車輛動態穩定性仿真分析
本節對車載貨物引起的整車轉動慣量和質心位置變化對其穩定性的影響進行仿真分析,參數見表1.
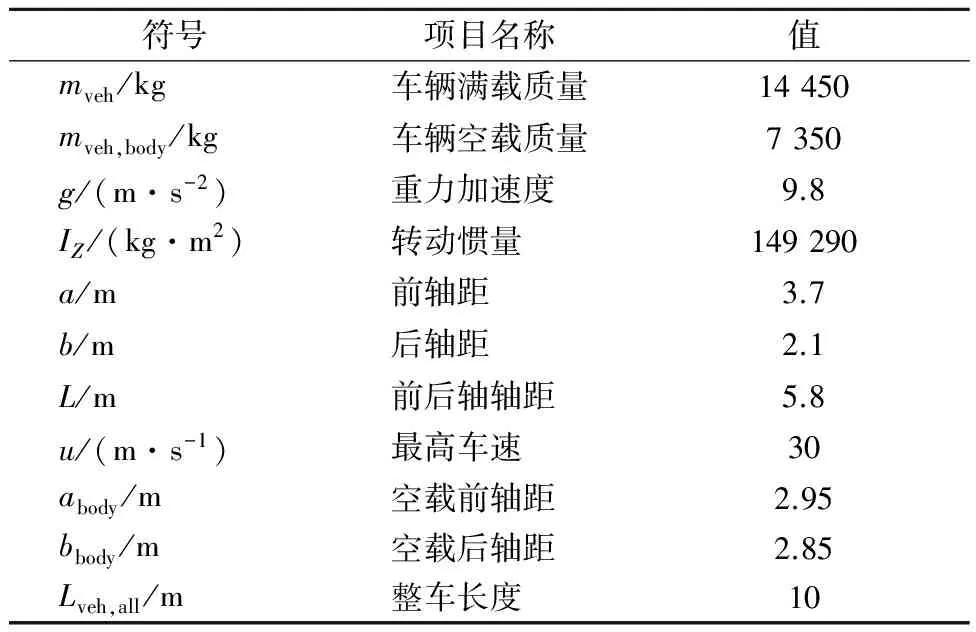
表1 仿真分析所用參數
3.1 前輪轉角6°時,不同車速下動態響應仿真分析
在整車轉動慣量變化為±10%,前輪轉角6°時,分別針對10,20,30 m/s不同車速工況時對整車動態穩定性進行仿真分析,仿真分析結果見圖3~8.
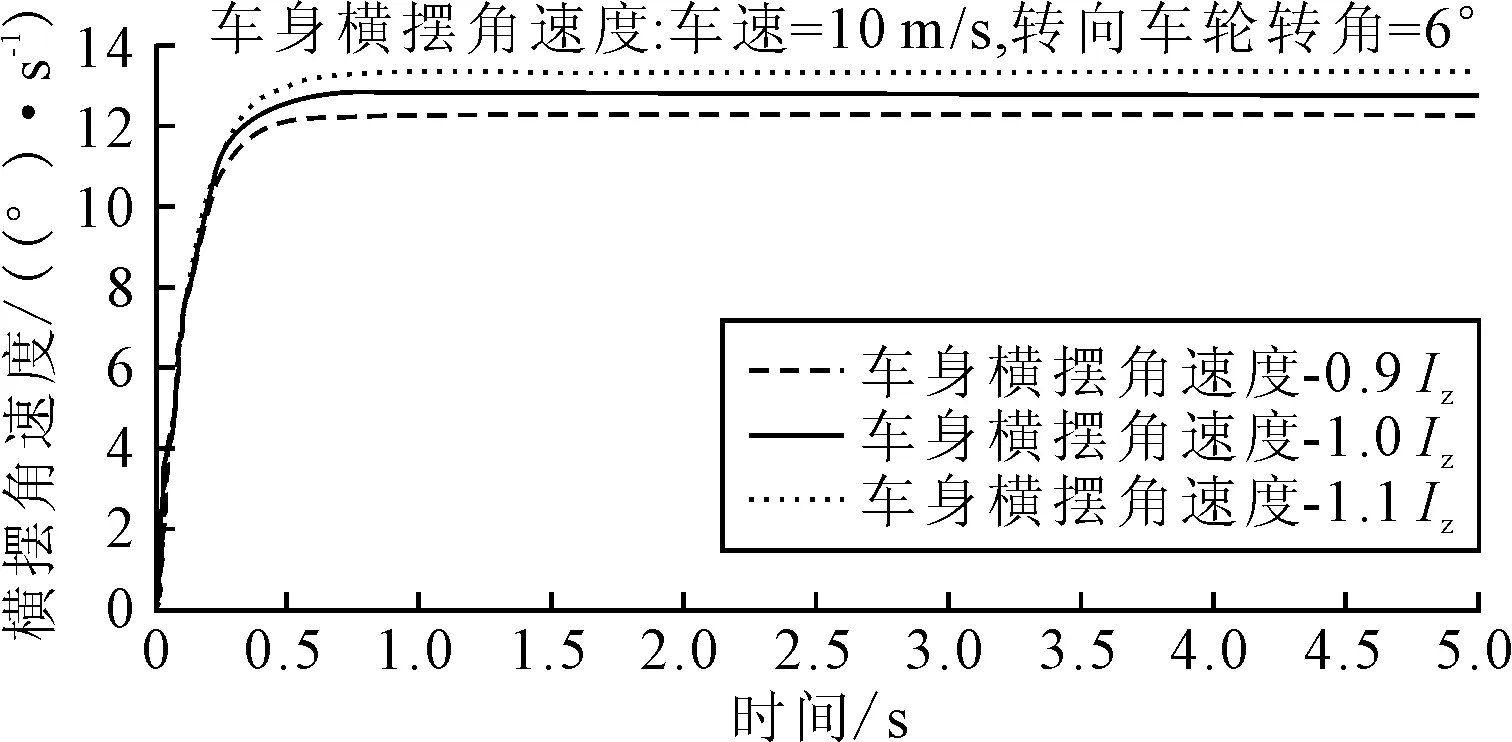
圖3 時域車輛動態響應圖(10 m/s)
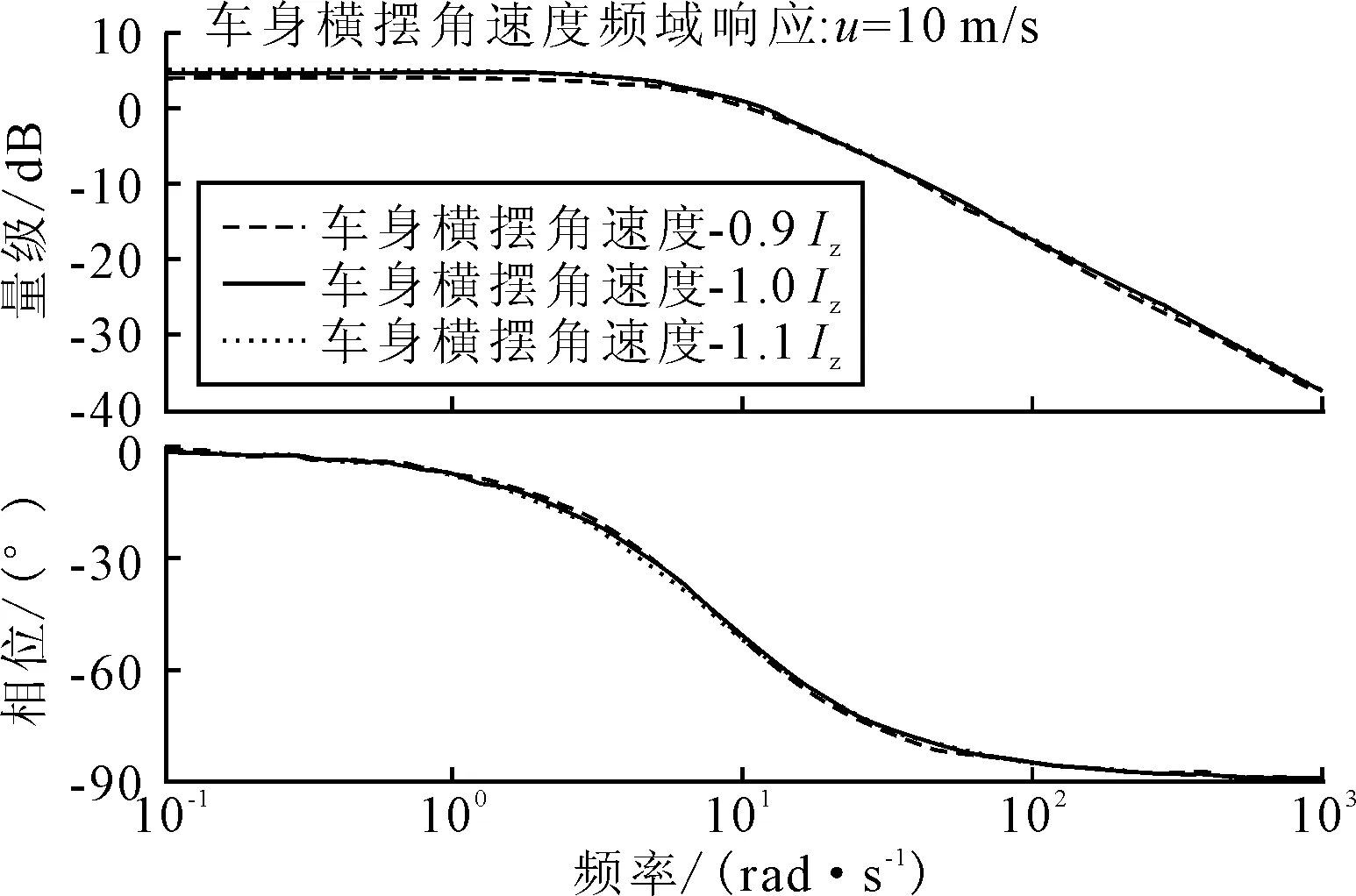
圖4 頻域車輛動態響應圖(10 m/s)
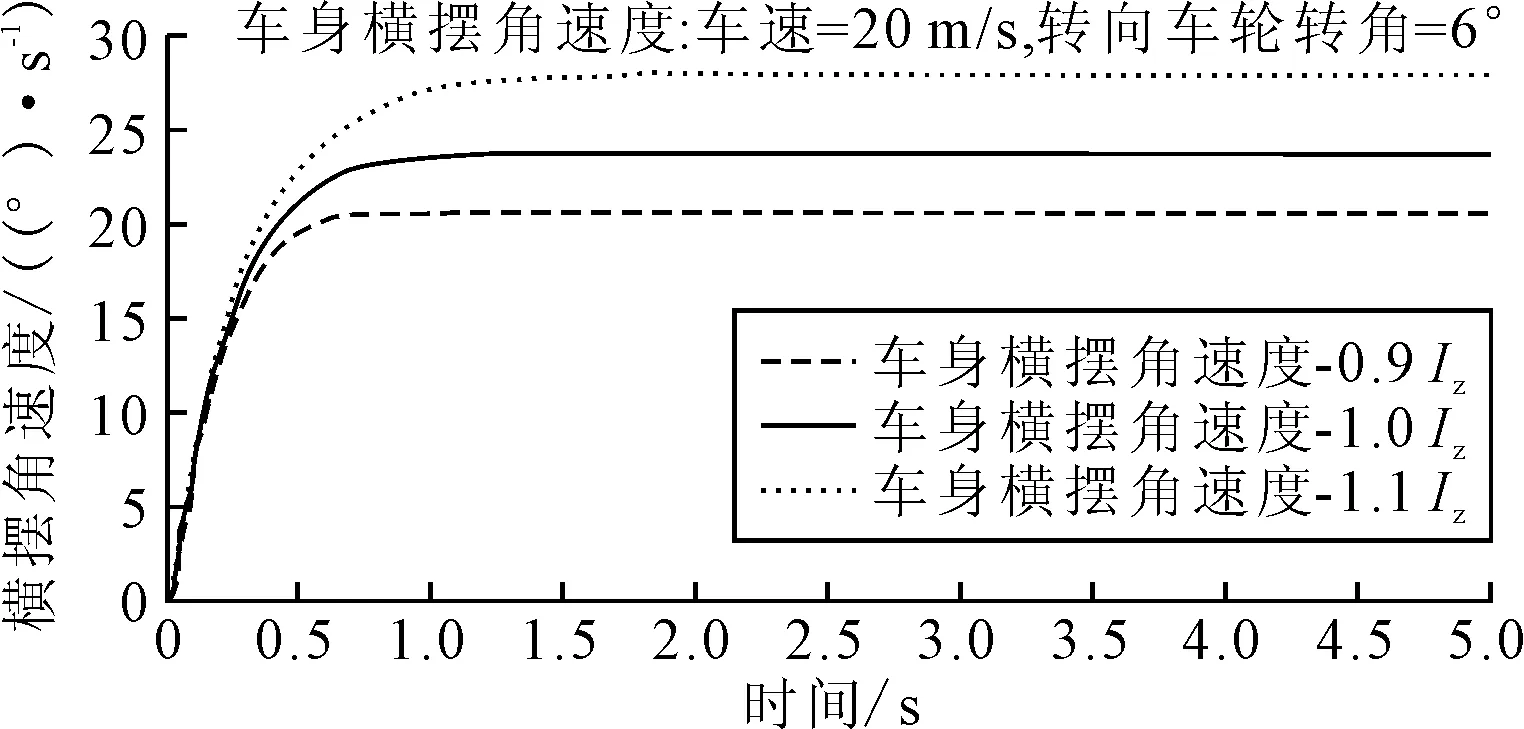
圖5 時域車輛動態響應圖(20 m/s)
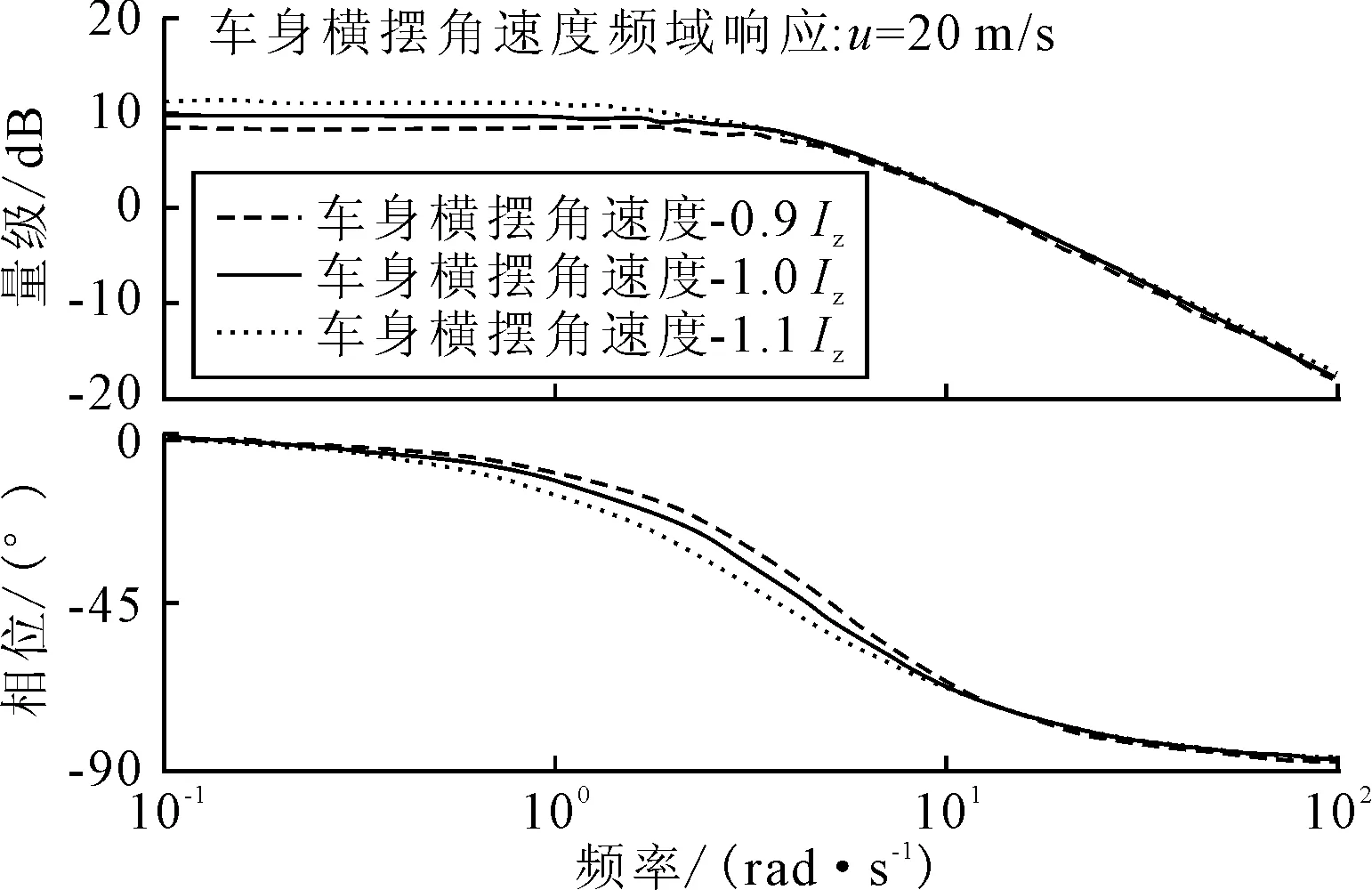
圖6 頻域車輛動態響應圖(20 m/s)
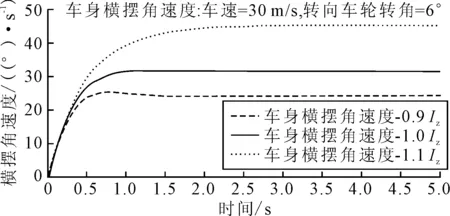
圖7 時域車輛動態響應圖(30 m/s)

圖8 頻域車輛動態響應圖(30 m/s)
從仿真結果可知,對于時域結果,低轉動慣量對輸入的響應在回到穩態值之前出現了超調,反映了其系統的低阻尼特性,而當轉動慣量增大后,車輛響應沒有超調現象,表現為高阻尼特性.
對于頻域響應,轉動慣量減小則表現出之后較小,響應較快,增大則相反.
對于車速響應,在低速時轉動慣量增減對車輛動態性能影響不大,當車速提高時,較大的轉動慣量對車輛動態響應的影響增大,反之則減小.
3.2 前輪轉角15°時,不同車速下動態響應仿真分析
在整車轉動慣量變化為±10%,前輪轉角增加為15°時,分別針10,20,30 m/s不同車速工況時對整車動態穩定性進行仿真分析,仿真分析結果分別見圖9~14.
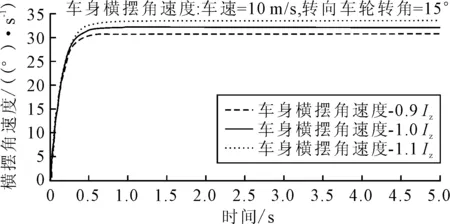
圖9 時域車輛動態響應圖(10 m/s)
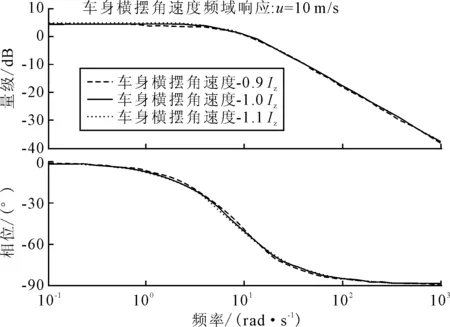
圖10 頻域車輛動態響應圖(10 m/s)
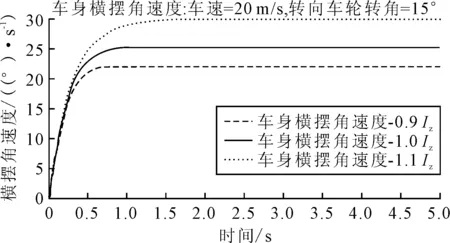
圖11 時域車輛動態響應圖(20 m/s)

圖12 頻域車輛動態響應圖(20 m/s)
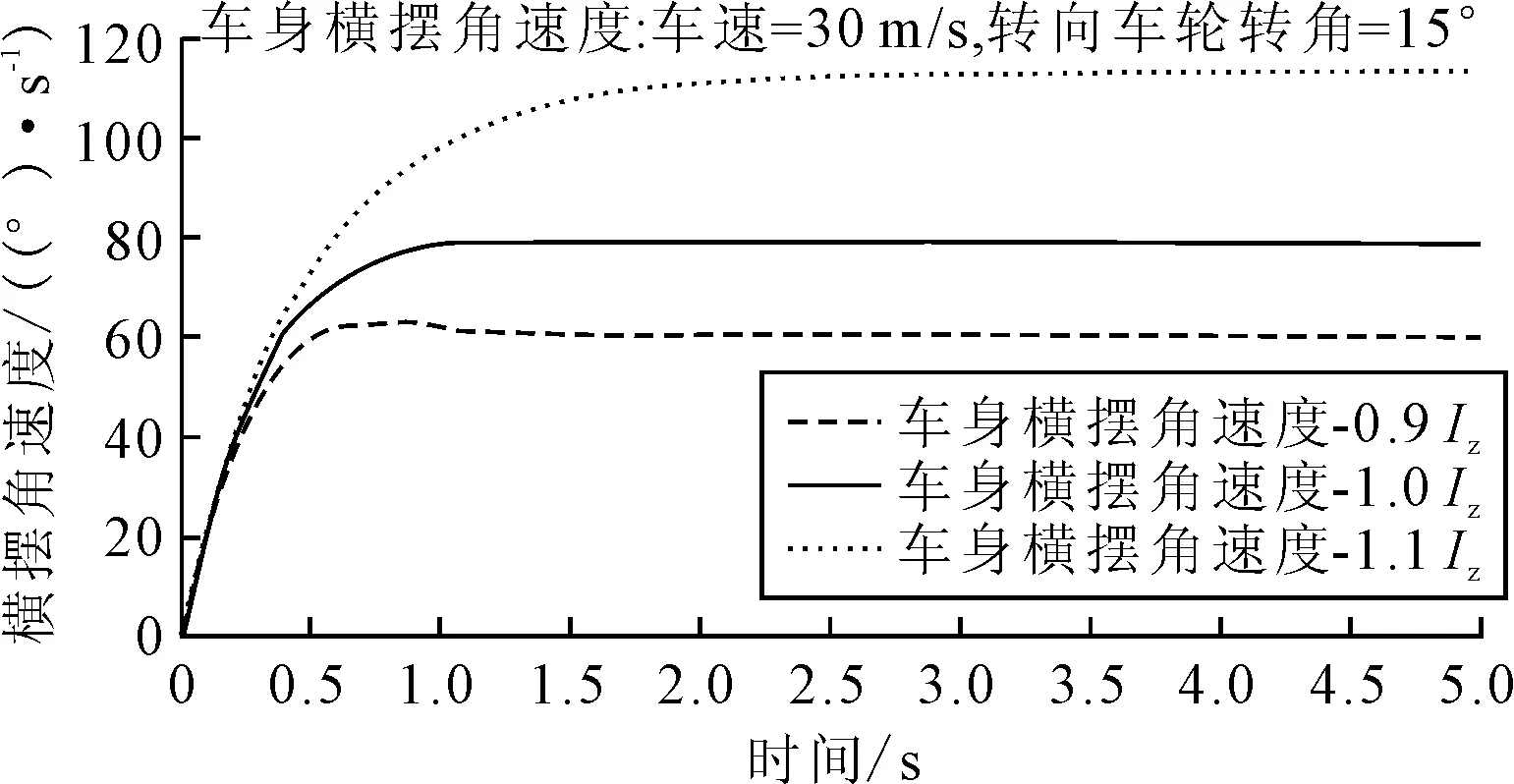
圖13 時域車輛動態響應圖(30 m/s)
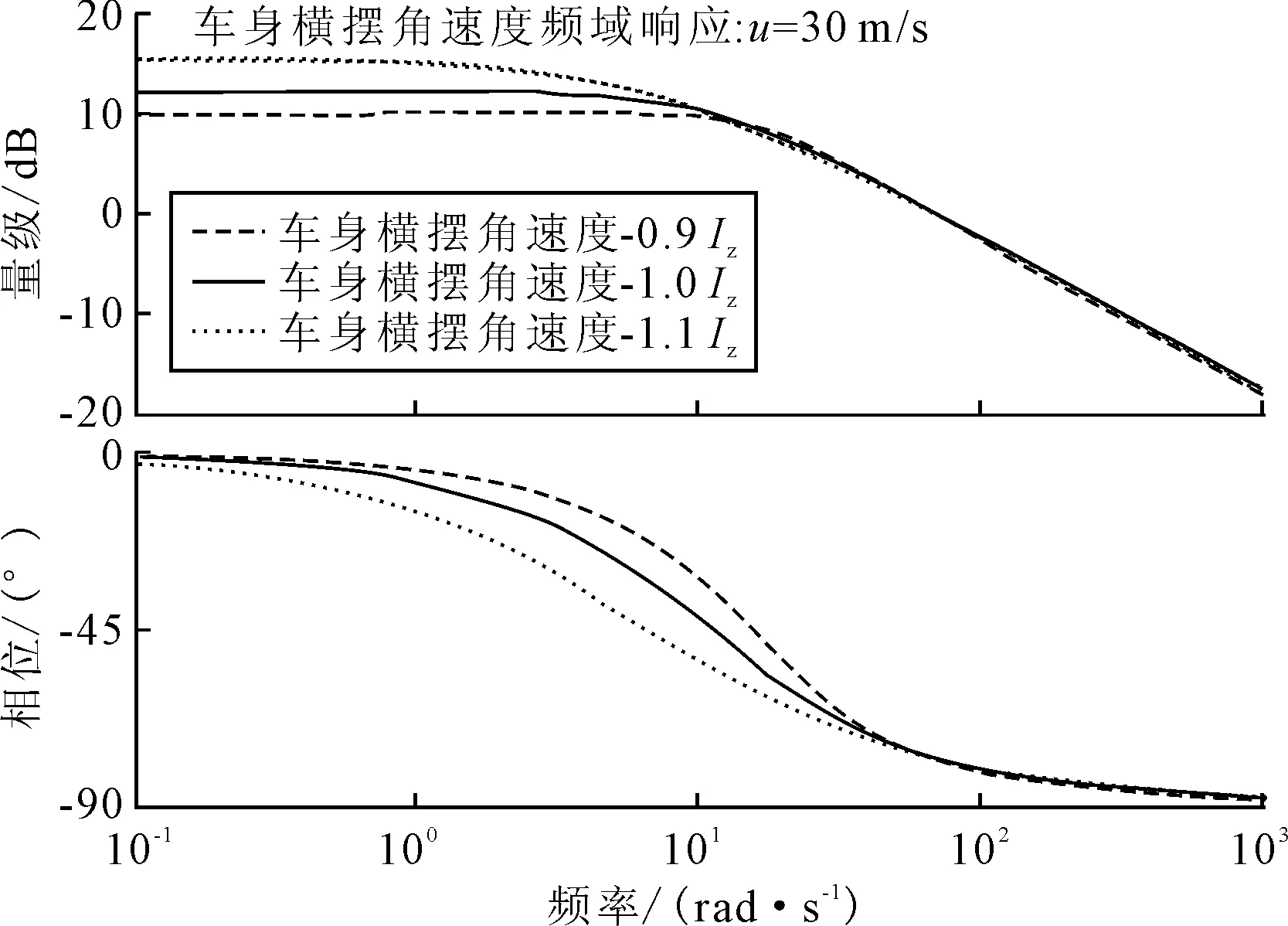
圖14 頻域車輛動態響應圖(30 m/s)
從上述仿真結果可知,當轉角增大到15°時,車輛轉動慣量的增減趨勢和在6°時基本一致,但車速增加后,尤其是在高速階段,車輛橫擺角速度增加比較明顯,車輛趨于失穩.
3.2 根軌跡分析
為了在最大車速范圍內對車輛轉動慣量和質心位置變化對車輛性能的影響進行全面的分析,對整車轉動慣量分別變化為標準轉動慣量的±10%和標準轉動慣量3種情況下最大車速范圍內的系統根軌跡圖進行分析,仿真結果見圖15.

圖15 車輛系統根軌跡應圖(5~30 m/s)
從上述仿真結果可知,在車速較小時特征值全落在實軸上,隨車速的不斷加大才逐漸接近虛軸,可見該車型在設計速度范圍內是穩定的,但是,隨著轉動慣量的變化,車輛的根軌跡距離虛軸較近,造成車輛的穩定性儲備變小.
4 結 束 語
結合現代農用冷藏物流運輸車的特點,針對其載貨重物質量和質心位置變化對物流運輸車的動態穩定性的影響的問題進行了研究,建立了車輛動力學模型,并對關鍵變量進行分析,計算得到貨重物質量和質心位置變化對物流運輸車的動態穩定性的數學對應關系,并且通過仿真分析,驗證了分析的有效性,為改善和提高農用冷藏物流運輸車的穩定性提供了一個有效的分析方法,對優化車輛設計,提高其安全性和效率具有重要的參考價值.
[1]王秀景,魯力群,冷藏物流車運輸車匹配設計及分析[J].物流技術與應用,2016(5):55-58.
[2]陳琦峰.汽車物流跨界運輸車研究與設計[J].物流技術與應用,2010(5):156-160.
[3]付智慧,趙長春.廂式運輸車新技術的應用[J].專用汽車,2003(3):67-72.
[4]黎法豪.汽車物流智能運輸車控制系統的開發與實現[J].高新技術,2015(6):98-105.
[5]李達,張銳,楊偉明,等.農產品物流運輸車遠程定位監測系統[J].保鮮與加工,2012,12(3):20-23.
[6]LI L. A novel vehicle dynamics stability control algorithm based on the hierarchical strategy with constrain of nonlinear tyre forces[J]. Vehicle System Dynamics,2015,53(8):1093-1116.
[7]OLEKSOWICZ S A, BURNHAM K, SOUTHGATE A, et al. Regenerative braking strategies, vehicle safety and stability control systems: critical use-case proposals[J]. Vehicle System Dynamics,2013(1):1-16.
[8]高云凱,馮海星,方劍光,等.基于質量線法的駕駛室慣性參數識別試驗研究[J].振動與沖擊,2013,32(6):189-193.
[9]MAHMOUDIAN N, GEISBERT J, WOOLSEY C. Approximate analytical turning conditions for underwater gliders: implications for motion control and path planning[J]. IEEE Journal of Oceanic Engineering,2010,35(1):131-143.
Study on Dynamic Response and Computer Simulation for Refrigerated Logistics Vehicles Based on the Moment of Inertia Transfer
ZHOU Zhiguo1)FANG Donghua1)FANG Jianfeng1)YU Xuecai2)
(AutomobileSchoolofZhejiangInstituteofCommunications,Hangzhou311112,China)1)(SchoolofEngineering,ZhejiangNormalUniversity,Jinhua321004,China)2)
Based on the kinematic model of vehicle, the model and state equations of modern high-speed refrigerated logistic vehicle are established to analyze the dynamic stability characteristics of the vehicle. By the identification method of rotational inertia of vehicle, identification evaluation is conducted for the rotational inertia induced by the variation of the center of gravity of the goods in the vehicle. By using MATLAB, both time- and frequency-domain analyses of the vehicle’s dynamic stability characteristics are performed. The simulation results show that this method can calculate the effects of variation of center of gravity on the dynamic stability of the refrigerated logistics vehicles.
modern high-speed logistics; active safety; model analysis; dynamic stability; computer simulation
2016-10-17
*浙江省自然科學基金項目資助(LY13E080010)
TP391.9
10.3963/j.issn.2095-3844.2016.06.007
周志國(1978—):男,碩士,副教授,主要研究領域為汽車智能檢測與診斷技術、車輛控制與仿真
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
物流技術與應用(2020年11期)2020-03-11 03:11:36
汽車觀察(2018年12期)2018-12-26 01:05:44
電子制作(2018年18期)2018-11-14 01:48:24
消費導刊(2018年8期)2018-05-25 13:20:16
山東工業技術(2016年15期)2016-12-01 05:31:22
現代企業(2015年2期)2015-02-28 18:45:09
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
商界(2014年12期)2014-04-29 00:44:03
終身教育研究(2014年5期)2014-02-28 01:23:06