資源三號衛星結構穩定性設計與實現
2017-01-03 01:50:54高洪濤羅文波史海濤莫凡李少輝張新偉劉希剛曹海翊
航天器工程 2016年6期
高洪濤 羅文波 史海濤 莫凡 李少輝 張新偉 劉希剛 曹海翊
(北京空間飛行器總體設計部,北京 100094)
資源三號衛星結構穩定性設計與實現
高洪濤 羅文波 史海濤 莫凡 李少輝 張新偉 劉希剛 曹海翊
(北京空間飛行器總體設計部,北京 100094)
結構穩定性是影響衛星圖像定位精度的重要環節。文章介紹了資源三號衛星在系統、相機、結構等方面為提高結構穩定性所采取的技術措施。資源三號衛星采用3臺星敏感器與3臺測繪相機一體化設計,并對星敏感器支架和相機支架等關鍵結構進行高穩定設計,提高星上姿態測量基準與成像基準的匹配精度;測繪相機采用低畸變光學系統設計,以提高相機內部穩定性;基于整星有限元模型對相機光軸在軌指向進行了仿真分析,并開展地面試驗對設計和分析進行驗證。衛星在軌數據表明:相機支架、星敏感器支架等結構在軌穩定性良好,衛星圖像定位精度超過任務指標要求,相關設計、分析與試驗技術可為后續高精度遙感衛星提供參考。
資源三號衛星;定位精度;結構穩定性;一體化設計
1 引言
資源三號衛星是我國自主研制的一顆高分辨率傳輸型立體測繪衛星,衛星采用三線陣立體測繪體制,用于長期、連續、穩定、快速地獲取覆蓋全國的高分辨率立體影像和多光譜影像,生產全國1:5萬基礎地理信息產品。01星和02星分別于2012年1月和2016年5月發射,獲取的圖像數據在基礎測繪、防災減災、農林水利、生態環境監測、城市規劃與建設等方面得到了較為廣泛的應用[1]。
與國內其它光學遙感衛星相比,資源三號衛星在圖像定位精度方面有了顯著提升[2]。影響衛星圖像定位精度的因素,除星敏感器陀螺測量精度和地面圖像數據處理精度外,還包括衛星系統在軌的穩定性,尤其相機載荷內方位元素穩定性以及相機與星敏感器成像基準相對指向的穩定性。國外測繪衛星均進行了穩定性設計,包括印度2005年發射的制圖衛星-1(CartoSat-1)[3],日本2006年發射的先進陸地觀測衛星-1(ALOS-1)和正在研制的ALOS-3[4],俄羅斯2015年發射的“獵豹”(M1)測繪衛星,以及美國近幾年發射的具有立體測繪能力的世界觀測(WorldView)系列遙感衛星[5]等,主要采用星敏感器與相機一體化布局、應用低膨脹結構材料等措施提高系統穩定性[6],但未見系統反映其穩定性設計、分析及驗證方法的技術文獻。本文基于國內現有技術能力與工業基礎,提出了用于提升光學遙感衛星圖像定位精度的結構穩定性設計方法,從系統、平臺和載荷等方面開展穩定性設計,綜合利用力熱仿真分析與地面試驗等手段進行穩定性分析與測量,并基于在軌圖像數據對系統穩定性能進行初步評價。
2 衛星特點與組成
資源三號衛星配置1臺三線陣測繪相機和1臺多光譜相機。三線陣相機由前視、正視和后視3臺CCD測繪相機組成,正視相機指向星下點,前后視相機在飛行方向與正視相機分別成±22°。前后視相機分辨率3.5 m(02星提升到2.5 m),正視相機分辨率2 m,成像幅寬近52 km。多光譜相機采用三反離軸光學系統設計,具有視場大、遮攔小、無色差、高傳函等優點,配置了藍、綠、紅和近紅外四個譜段,地面像元分辨率5.8 m,成像幅寬51 km。
衛星采用資源二號平臺。針對資源三號衛星測繪精度高的特點,星上配置了高精度星敏感器(測量精度優于5″)和高精度三浮陀螺,在軌獲取高精度姿態測量信息,地面處理時通過星敏感器陀螺聯合定姿可進一步提高姿態測量精度。采用GPS和激光角反射器提高衛星軌道確定精度,事后軌道定位精度為0.2 m。
衛星采用縱軸向前的飛行指向,由服務艙、載荷艙和太陽翼組成。服務艙采用承力筒加箱板的主承力結構形式,載荷艙采用蜂窩板組成的箱板式結構,頂部安裝三線陣相機和多光譜相機,內部布局相機、數傳等分系統電子設備,外側安裝數傳天線。衛星±Y側各安裝1個太陽翼,每翼3塊太陽電池板。衛星構形如圖1所示。
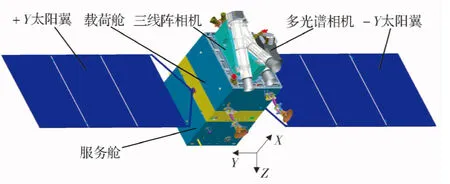
圖1 資源三號衛星組成圖
Fig.1 Components of ZY-3 satellite
3 結構穩定性設計與分析
按照星地一體化測繪圖像數據處理過程,星上利用星敏感器實時測量數據和三線陣相機與星敏感器間幾何標定數據精確確定三線陣相機光軸指向,并利用相機內部標定數據進一步確定3臺相機每個CCD像元對應的光線指向;地面采用直接交會或平差處理等方法,最終確定各圖像點的地面三維坐標,實現圖像的幾何定位。為實現測繪任務所需的高定位精度,星上除配置高精度星敏感器外,還必須保證星敏感器與三線陣相機間的連接結構保持穩定,以實現姿態測量基準與成像基準的統一,同時保證三線陣相機內部光機結構與焦面成像器件穩定,以提高圖像內精度。圍繞上述要求,資源三號衛星開展了系統級高穩定設計,包括衛星平臺與載荷一體化設計、測繪相機高穩定設計以及星敏感器支架等關鍵支撐結構的高穩定設計。
3.1 姿態測量部件與成像載荷一體化布局
為最大限度降低星敏感器與三線陣相機間的相對指向變化,提高兩者幾何標定數據的穩定性,衛星采用星敏感器與三線陣相機一體化設計,如圖2所示,星敏感器直接安裝到三線陣相機支架上,使星敏感器測量基準與三線陣相機基準最大限度保持一致,通過緊湊式布局縮短星敏感器與三線陣相機間的結構連接路徑,減小在軌空間環境變化對兩者相對幾何位置的影響。
針對星敏感器產品光軸方向測量精度高,橫軸方向測量精度相對較低的特點,需同時利用2臺以上星敏感器的測量數據進行三線陣相機三軸高精度指向確定,為此要求所有星敏感器具備共同的安裝基準及穩定的幾何位置關系。3臺星敏感器安裝到同一個星敏感器支架上實現一體化布局,同時嚴格控制星敏感器支架的外形尺寸,縮短星敏感器間結構連接路徑,降低星敏感器相對位置對外部環境變化的敏感。
將前視、正視和后視相機進行一體化布局,通過同一相機支架安裝到衛星平臺結構上。由于前后視相機形成的攝影測量基線大,利用前后視相機圖像構成立體像對易于實現更高的定位精度,布局設計時將前視相機和后視相機鄰近布局,優先保證前后視相機光軸相對指向的穩定性。
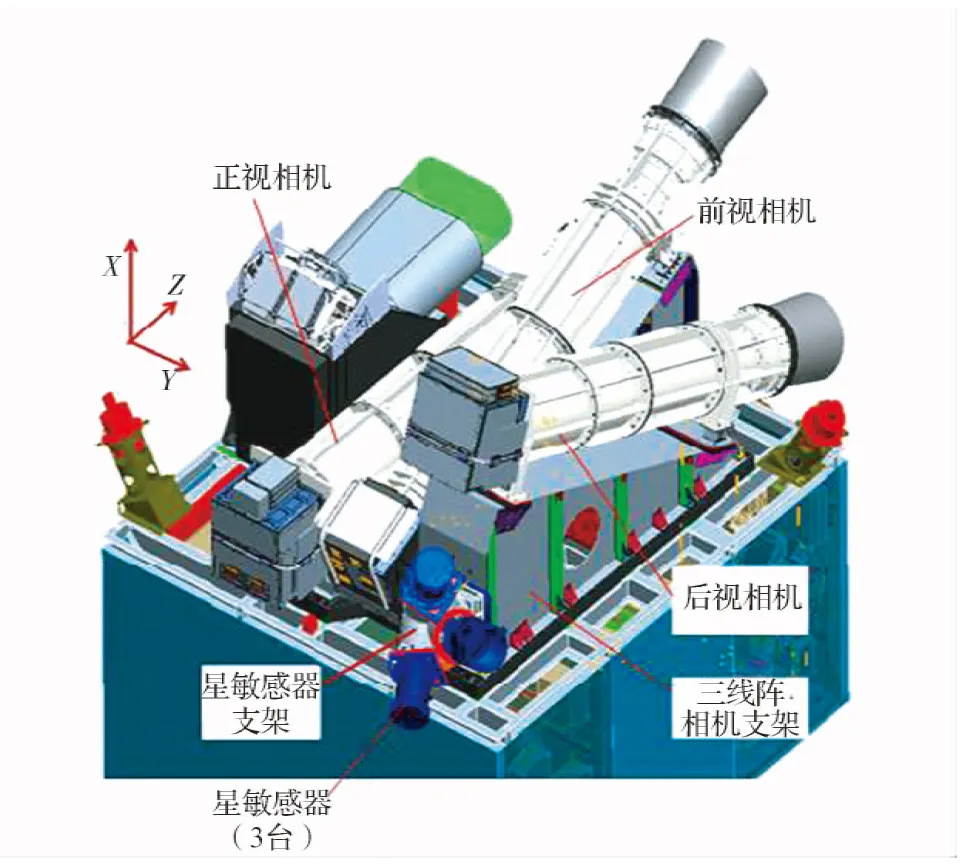
圖2 星敏感器與三線陣相機一體化設計
Fig.2 Integrated design of star trackers and three-line-array cameras
3.2 多個星敏感器支架
3.2.1 星敏感器支架高穩定設計
星敏感器支架維持著3個星敏感器在星上的空間指向,設計時綜合考慮了3個星敏感器不同布局指向、星敏感器安裝與精測、星敏感器組合體包絡約束、組合體整體剛度以及星敏感器支架在軌熱穩定性等要求。支架采用緊湊式樹枝形結構設計,以適應星敏感器腰部安裝要求;支架由4個柱形結構組合而成,如圖3所示,在柱形結構末端設置法蘭,分別與3臺星敏感器和相機支架進行連接。在保證星敏感器總裝操作空間的基礎上,嚴格控制柱形結構大小以及4個柱形結構間距,力求布局緊湊。星敏感器支架整體采用M55J環氧碳纖維復合材料,材料線膨脹系數1×10-6(℃)-1,具有良好的結構熱穩定性能。支架整體由模具鋪敷成型后再經樹脂傳遞模成形(RTM)工藝固化而成。
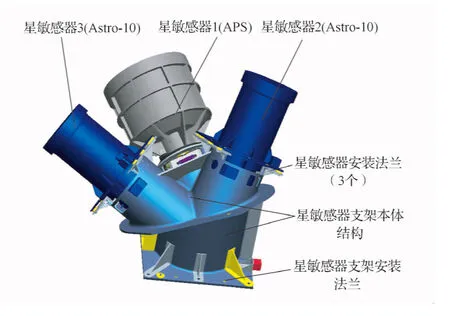
圖3 星敏感器組件示意圖
Fig.3 Components of star trackers
對星敏感器支架熱穩定性進行有限元分析,在MSC/NASTRAN軟件中建立星敏感器支架有限元模型(圖4),采用四邊形殼單元模擬支架結構,分析了支架溫度變化對星敏感器指向的影響,分析數據顯示支架溫度均勻變化1 ℃引起星敏感器指向變化約0.2″,滿足結構穩定性設計要求。
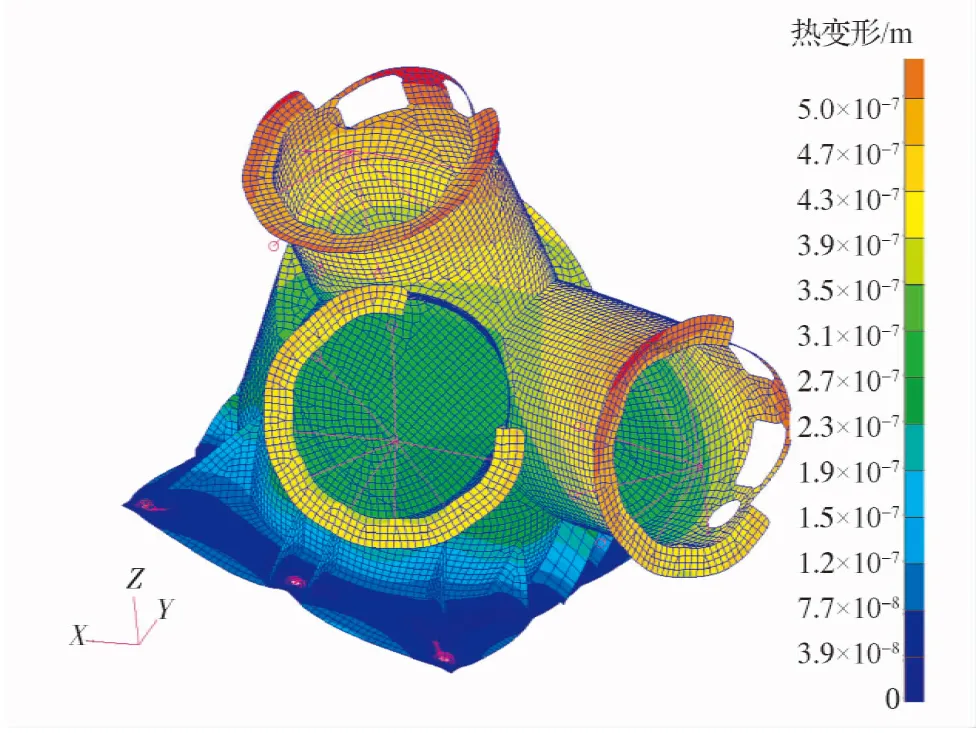
圖4 星敏感器支架溫度變化1 ℃各點熱變形
Fig.4 Thermal distortion of star tracker bracket with 1℃ fluctuation
3.2.2 星敏感器支架地面穩定性試驗
星敏感器支架在軌熱變形為微米量級,相應引起星敏感器指向變化在角秒量級,常規地面變形檢測或指向測量方法無法滿足上述精度要求。采用一種高精度非接觸式表面全場三維變形測量方法,通過2臺相機(呈一定夾角)同時對被測星敏感器安裝法蘭表面進行成像,利用三角測量原理精確計算法蘭表面三維幾何坐標,擬合并對比溫度變化前后安裝法蘭法向變化,分析溫度變化產生的星敏感器支架變形引起的星敏感器指向變化。
熱變形測量試驗裝置如圖5所示,為減小周圍環境對試驗結果的影響,測量系統及被測星敏感器組合體整體放置在隔振平臺上。試驗過程中將星敏感器支架溫度從室溫25 ℃依次加熱到40 ℃和55 ℃,待支架各點溫度穩定后對星敏感器支架法蘭表面進行測量,擬合出法蘭平面法向并計算與初始指向的夾角,試驗數據如圖6所示。排除系統測量誤差影響后,25 ℃附近支架溫度變化1 ℃引起星敏感器指向變化約1″,較仿真結果略大但量級相當,初步分析與實際產品材料參數離散性有關。
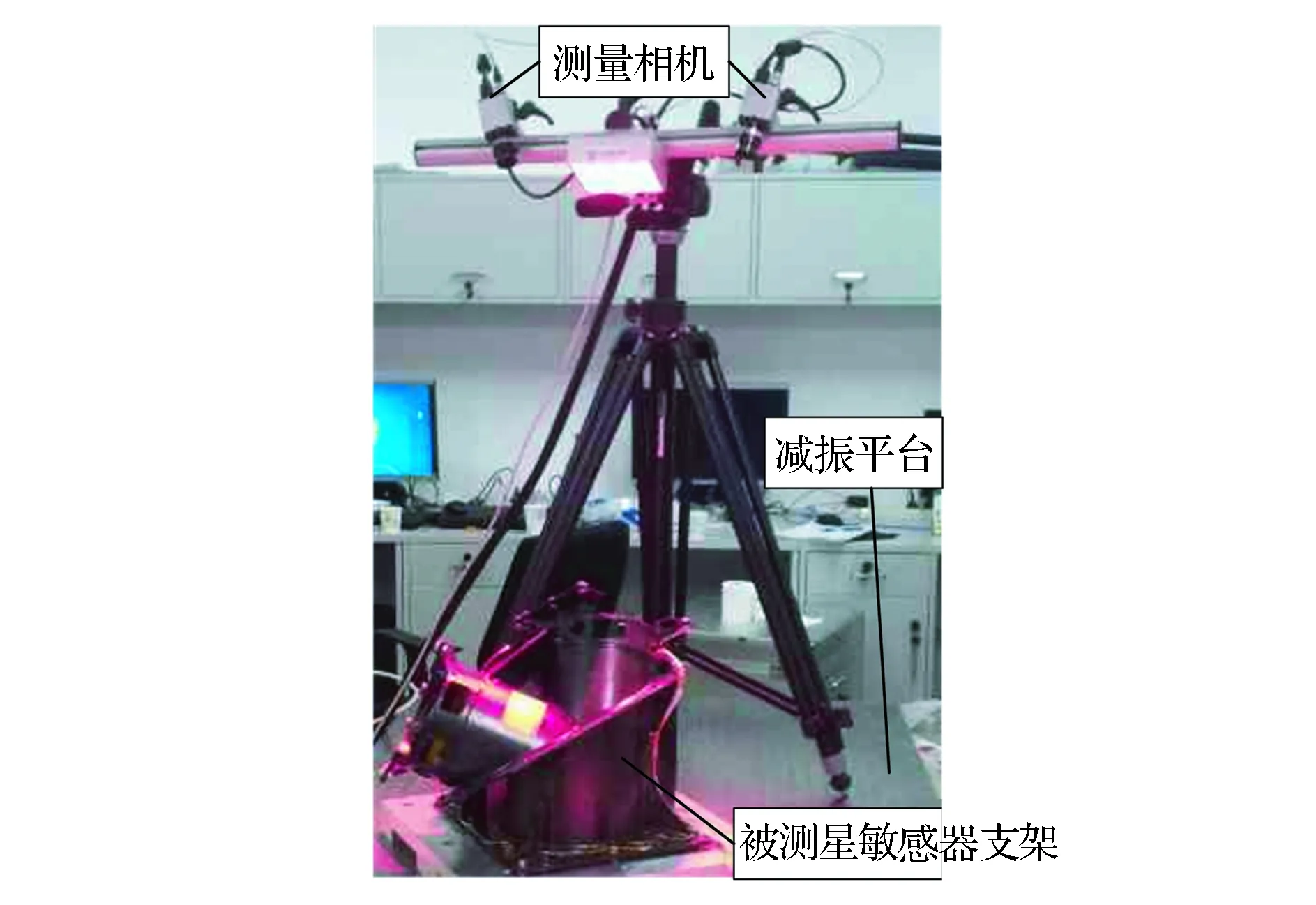
圖5 星敏感器支架熱變形測量試驗Fig.5 Thermal distortion measurement of star tracker bracket
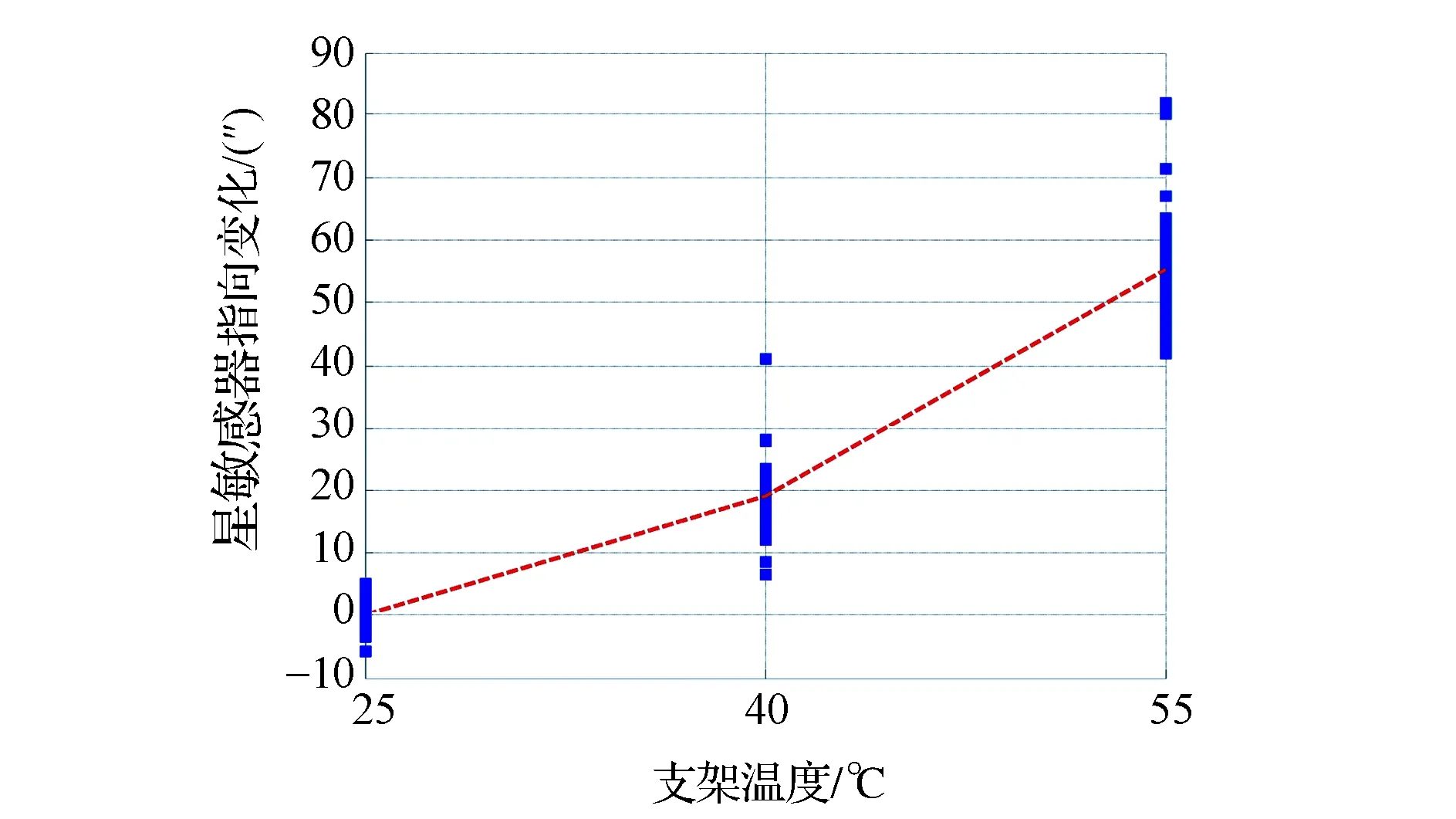
圖6 星敏感器支架熱變形測量數據Fig.6 Thermal distortion data of star tracker bracket
3.2.3 星敏感器支架在軌穩定性分析
對星敏感器支架入軌后一年的在軌溫度遙測數據進行分析,星敏感器支架底座溫度變化范圍17.7~18.3 ℃,星敏感器支架主體溫度變化范圍11.7~12.3 ℃,在軌溫度穩定。分別對入軌第1年1月、5月、11月及次年9月4個階段的星敏感器在軌光軸指向測量數據(過境時段)進行了分析,如圖7所示。星敏感器2/3光軸夾角變化在15"以內,與星敏感器2/3在軌光軸測量誤差相匹配。由于期間星敏感器支架在軌溫度較為穩定(溫度變化≤0.3 ℃),分析認為星敏感器光軸夾角變化主要由星敏感器測量誤差引起,該時段內星敏感器支架穩定性良好。
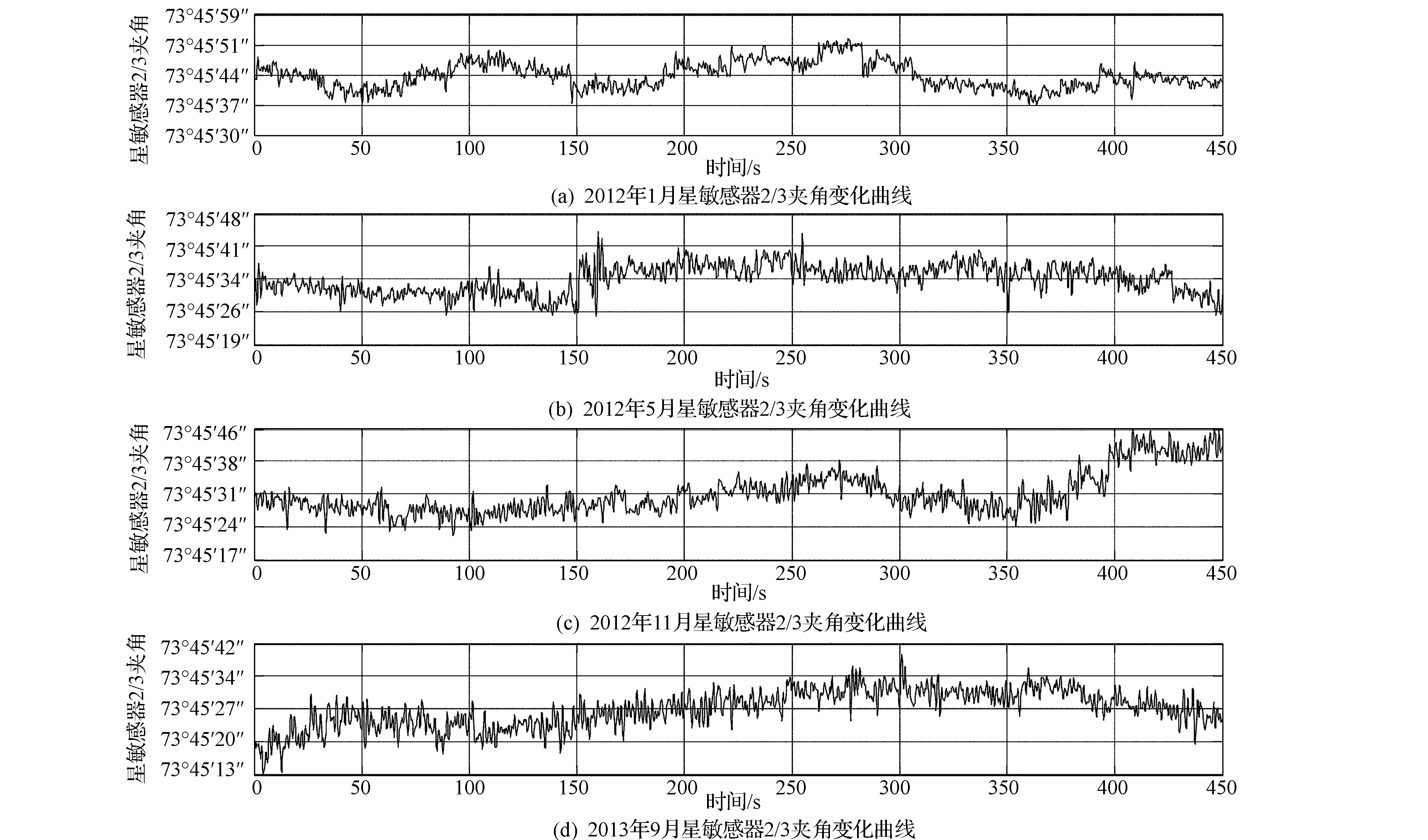
圖7 不同時段星敏感器2和星敏感器3光軸夾角變化曲線Fig.7 Variation curve of angle between optical axes of star tracker 2 and 3 in different periods
進一步分析上述4個時段內的星敏感器光軸夾角均值,5月相對1月(入軌初期)光軸夾角均值變化約10″,初步分析由于入軌初期星敏感器支架復合材料在軌析氣所致;11月和次年9月相對上一時段變化相對較小,依次為3″和4″,表明支架材料經過入軌初期析氣等過程后保持穩定。
3.3 高穩定測繪相機系統
3.3.1 低畸變高穩定測繪相機設計
測繪相機主點位置、主距以及畸變等內方位元素均影響相機成像光線的指向確定,衛星發射前均對上述成像參數進行高精度標定,衛星入軌后將通過在軌標定進一步消除發射段及在軌環境變化引起的偏差,之后則要求相機內方位元素保持穩定。
相機采用透射式像方準遠心光學系統,當像面因溫度波動等原因而發生前后漂移時,由于軸外主光線近乎與光軸平行,像高不會因像面位置變化而變化,從而有利于保持像高和畸變穩定,減少系統離焦帶來的測量誤差,如圖8所示[7]。相機光機結構采用低膨脹鈦合金材料,在保證良好力學性能的同時,可以降低相機結構熱變形,減小溫度變化導致的鏡片面形及鏡片間距變化,提高像質和主距、畸變等內方位元素穩定性。
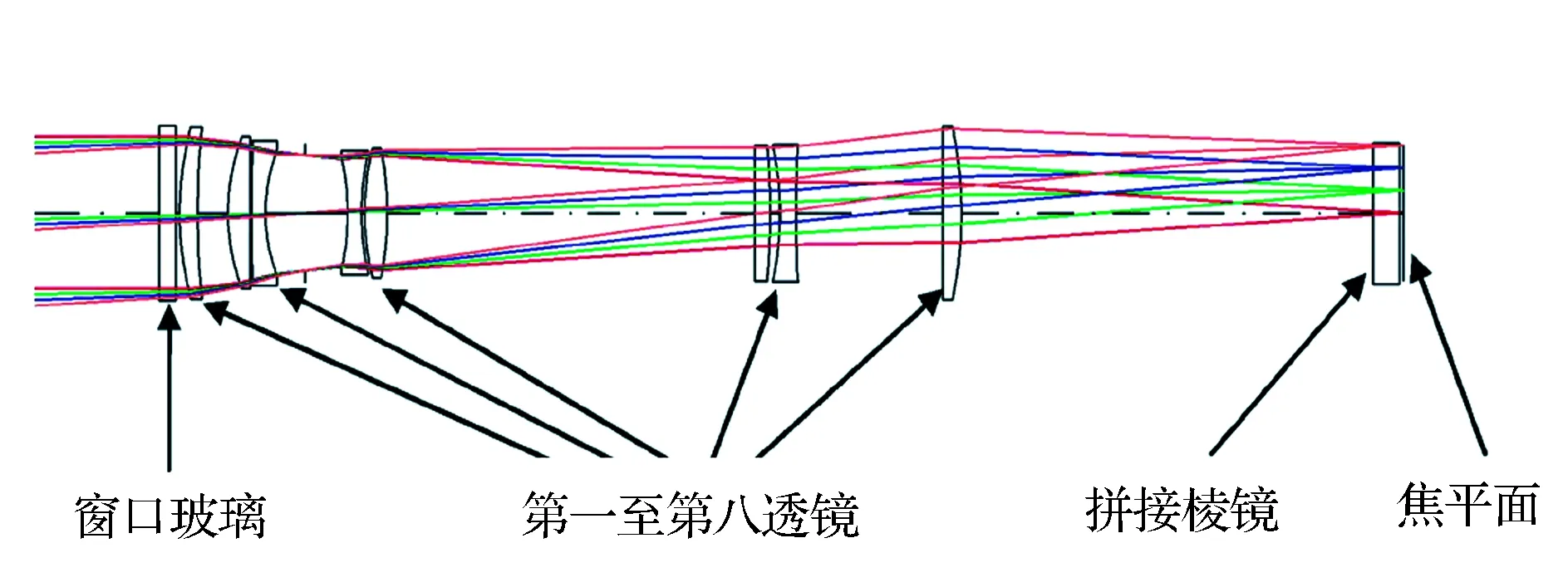
圖8 相機光學系統示意圖Fig.8 Schematic of camera optical system
利用ZMAX光學設計軟件分析了溫度變化對主距和像高等內方位元素的影響,顯示相機焦距和像高受均勻溫度變化及軸向梯度變化影響較小,但受徑向梯度變化影響較大,為保證相機內方位元素穩定性,對相機主體進行精密控溫,根據各部位外熱流大小在相機鏡筒外表面粘貼相應功率的薄膜電加熱器,相機各部件間進行隔熱設計,鏡筒外圍包覆多層隔熱材料,熱分析表明相機主體溫度范圍、溫度梯度均能滿足要求。
3.3.2 高穩定相機支撐結構設計
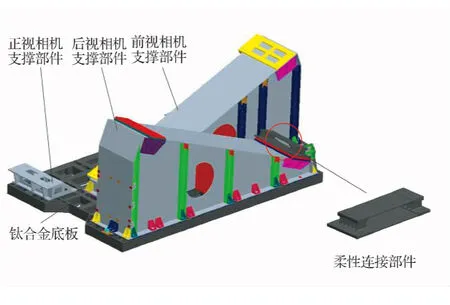
三線陣相機支架用于前視、正視和后視3臺測
繪相機的安裝指向維持,并為星敏感器組合體提供支撐。三線陣相機支架由相機支撐部件和底板組成,如圖9所示,支撐部件采用M55J高模量碳纖維復合材料,利用其高模量、高導熱率和低膨脹的特點,減少熱變形對星敏感器和相機指向確定的影響,同時與星敏感器支架材料保持一致,有利于兩種支架變形匹配;樹脂基體材料選用氰酸酯,氰酸酯具有優良的電絕緣特性、極低的吸濕率、較高的耐熱性和良好的力學性能及尺寸穩定性。相機底板采用鈦合金材料,在為3臺相機提供較強支撐的同時,其膨脹系數較小,可有效降低溫度對相機指向的影響。
考慮到相機鏡筒鈦合金材料與支架復合材料熱膨脹系數不同,為避免溫度變化時兩者變形不匹配引起相機指向變化,相機與支架之間采用柔性連接,如圖9所示,利用金屬薄片陣列結構減小連接環節沿相機光軸方向的支撐剛度,釋放相機鏡筒因溫度變化產生的熱變形,提高相機光軸指向穩定性。
采用主被動結合方式對三線陣相機支架進行精密控溫,經分析,三線陣相機支架上各點溫度波動范圍不超過1 ℃,前視、正視和后視相
機主體上各點溫度波動不超過1 ℃,滿足設計要求。
圖9 三線陣相機支架示意圖
Fig.9 Mock-up of bracket of three-line-array cameras
利用MSC/NASTRAN軟件建立了整星有限元模型,將高低溫等不同極端工況條件下的整星溫度場映射到有限元模型上,分析結構熱變形對各測繪相機光軸的指向變化,如圖10所示。分析顯示測繪相機成像期間各相機光軸夾角變化不超過0.5″,穩定性良好,滿足使用要求。
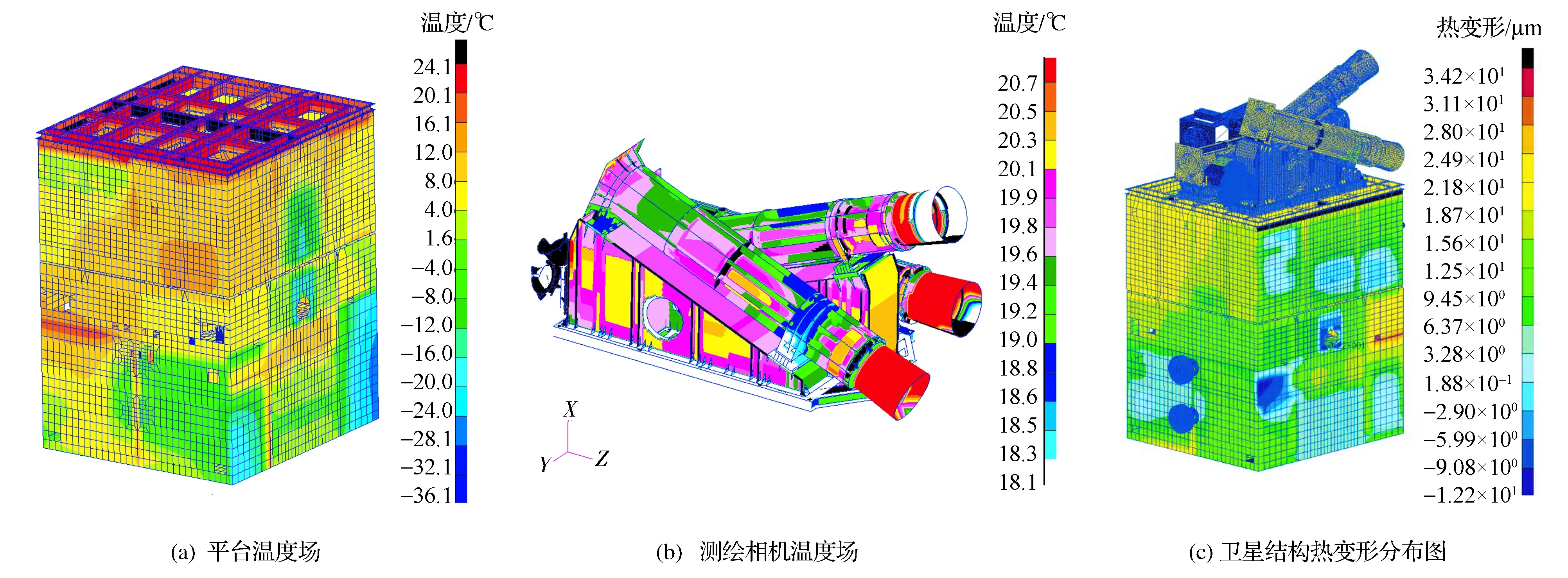
圖10 衛星結構熱變形分析Fig.10 Thermal distortion analysis of ZY-3 satellite
3.3.3 相機地面穩定性試驗
基于三線陣相機鑒定產品,開展了相機內方位元素穩定性試驗和相機光軸指向穩定性試驗。試驗過程中將三線陣相機組合體整體放置在減振平臺上,相機表面粘貼薄膜加熱器控制相機溫度水平和溫度梯度,采用內方位元素測試儀對相機主點、主距和畸變進行實時測量(圖11)。試驗中設計了均勻溫升和溫度梯度等不同溫度變化工況,根據相機在軌溫度預示結果確定相機溫度變化范圍,按照不同溫度變化模式產生的熱變形對相機內方位元素及相機光軸指向變化進行了測量。
相機內方位元素穩定性試驗分別選取了相機主體均勻溫升1 ℃和溫度梯度1 ℃等工況,內方位元素測試儀測量結果顯示各工況下相機畸變最大變化量不超過儀器測量誤差,可以滿足指標要求。
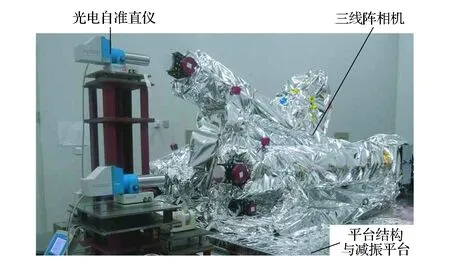
圖11 三線陣相機熱變形測量試驗Fig.11 Thermal distortion measurement of three-line-array camera
相機指向穩定性試驗選取了相機均勻溫升2 ℃和溫度梯度2 ℃等溫度變化工況,發現Y向溫度梯度對3臺相機間夾角影響最大,結合三線陣相機在軌溫度預示數據,預計三線陣相機光軸夾角變化在0.8″以內,與分析值相當,滿足使用要求。
4 衛星在軌穩定性
衛星入軌后,受當前地面圖像數據處理方法的限制,難以對各誤差因素進行獨立識別和標定,主要通過圖像定位精度隨時間的變化情況對系統整體穩定性進行評估。入軌初期首先進行在軌標定,對星敏感器、相機安裝標定數據等系統偏差進行修正,修正后圖像定位精度在10 m左右,后續隨時間有逐漸變大的趨勢,5月以后基本保持在30 m左右,重新進行在軌標定后,圖像定位精度可恢復到10 m。入軌后前8個月的圖像定位精度變化情況如圖12所示[8]。結合星敏感器光軸夾角在軌變化情況,初步推斷5月前圖像定位精度變差與星敏感器支架及相機支架復合材料在軌析氣有關,待支架材料穩定后衛星圖像定位精度可保持較好的穩定性。
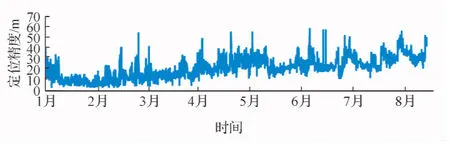
圖12 資源三號衛星圖像定位精度變化曲線
Fig.12 Variation curve of geolocation accuracy of ZY-3 satellite
文獻[9]給出了資源三號衛星從2012年11月至2015年3月期間內5個時間點上嵩山地區圖像定位精度的變化情況,采用2012年11月的檢校模型,分別計算各時間點衛星圖像的平面定位精度(中誤差),變化范圍為2.1~14.4 m,滿足無地面控制點條件下平面定位精度優于100 m的任務要求;對每個時間點的衛星圖像單獨進行檢校后,平面定位殘差(中誤差)不超過3.1 m,表明資源三號衛星相機內部及星敏感器與相機連接結構的穩定性均保持良好。
5 結束語
高圖像定位精度是測繪及高性能遙感衛星的基本特征,而系統結構穩定性又是影響在軌圖像定位精度的關鍵因素。本文給出了資源三號衛星在系統、平臺和相機載荷等層面采取的穩定性設計方法,實現了針對結構穩定性評價的仿真分析與地面試驗,并通過在軌圖像數據對衛星穩定性進行了初步評估和驗證,結果表明資源三號衛星結構穩定性設計滿足任務要求[10]。本文所采用的穩定性設計、分析及試驗方法可為其它光學遙感衛星研制提供參考和借鑒。
References)
[1]唐新明,王鴻燕. 資源三號衛星應用分析與展望[J].航天器工程,2016,25(5): 1-10
Tang Xinming,Wang Hongyan. Analysis and prospect of application of ZY-3 satellite[J]. Spacecraft Engineering,2016,25(5): 1-10 (in Chinese)
[2]曹海翊,劉希剛,李少輝. 資源三號衛星遙感技術[J]. 航天返回與遙感,2012,33(3):7-16
Cao Haiyi,Liu Xigang,Li Shaohui. ZY-3 satellite remote sensing technology[J]. Spacecraft Recovery & Remote Sensing,2012,33(3): 7-16 (in Chinese)
[3]高洪濤,陳虎,劉暉,等. 國外對地觀測衛星技術發展[J]. 航天器工程,2009,18(3): 84-92
Gao Hongtao,Chen Hu,Liu Hui,et al. Development of overseas earth-observing satellite techonology[J]. Spacecraft Engineering,2009,18(3): 84-92 (in Chinese)
[4]Eoportal. ALOS-3(Advanced Land Observing Satellite-3): optical mission[EB/OL]. [2016-11-20]. https://directory.eoportal.org/web/eoportal/satellite-missions/a/alos-3
[5]Eoportal. WorldView-3(WV-3)[EB/OL]. [2016-11-20]. https://directory.eoportal.org/web/eoportal/satellite-missions/v-w-x-y-z/worldview-3
[6]Takanori Iwata. Precision attitude and position determination for the Advanced Land Observing Satellite(ALOS)[C]// Proceedings of SPIE. Bellingham: SPIE,2005:34-50
[7]高衛軍,孫立,王長杰,等. “資源三號”高分辨率立體測繪衛星三線陣相機設計與驗證[J]. 航天返回與遙感,2012,33(3): 25-35
Gao Weijun,Sun Li,Wang Changjie,et al. Design and verification of three-line array camera for ZY-3 high resolution stereo mapping satellite[J]. Spacecraft Recovery & Remote Sensing,2012,33(3): 25-35 (in Chinese)
[8]潘紅播,張過,唐新明,等. 資源三號測繪衛星傳感器校正產品的幾何模型[J]. 測繪學報,2013,42(4): 516-522
Pan Hongbo,Zhang Guo,Tang Xinming,et al. The geometrical model of sensor corrected products for ZY-3 satellite[J]. Acta Geodaetica et Cartographica Sinica,2013,42(4): 516-522 (in Chinese)
[9]王愷,陳世平,曾勇. 應用偏最小二乘法的衛星圖像在軌幾何檢校方法[J]. 航天器工程,2016,25(5): 32-38
Wang Kai,Chen Shiping,Zeng Yong. On-orbit geometric calibration method of satellite imagery based on partial least squares method[J]. Spacecraft Engeering,2016,25(5): 32-38 (in Chinese)
[10]李德仁,王密. “資源三號”衛星在軌幾何定標及精度評估[J]. 航天返回與遙感,2013,33(3): 1-6
Li Deren,Wang Mi. On-orbit geometric calibration and accuracy assessment of ZY-3[J]. Spacecraft Recovery & Remote Sensing,2012,33(3): 1-6 (in Chinese)
(編輯:張小琳)
Structural Stability Design and Implementation of ZY-3 Satellite
GAO Hongtao LUO Wenbo SHI Haitao MO Fan LI Shaohui ZHANG Xinwei LIU Xigang CAO Haiyi
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
Structural stability is a key influencing factor for geolocation accuracy of satellite. Structural stability improvement techniques in system design,camera design and structure design of ZY-3 satellite are presented in this paper. Three star trackers and three CCD cameras are integrated as a whole,and brackets of star trackers and cameras are designed especially for high stability. All these measures are used to improve matching accuracy between attitude measuring reference and imaging reference. A low distortion optical system is used to improve the internal stability of cameras. On-orbit pointing direction of camera is analyzed based on satellite FEM model,and ground tests are carried out to verify the design and analysis. ZY-3 images and telemetry data show that the brackets of camera and the star tracker are stable,and geolocation accuracy of image precedes the mission requirement. The techniques employed in ZY-3 can be used in follow-up large-scale mapping satellites and remote sensing satellites with high accuracy.
ZY-3 satellite; geolocation accuracy; structural stability; integrated design
2016-09-20;
2016-11-22
國家重大科技專項工程
高洪濤,男,高級工程師,博士,從事遙感衛星總體設計工作。Email:gaohongtao@tsinghua.org.cn。
V414
A
10.3969/j.issn.1673-8748.2016.06.004
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
衛星與網絡(2015年12期)2015-10-27 02:21:46