全回轉槳初始安裝偏角對船舶操縱性的影響
2017-01-03 09:12:39吳興亞高霄鵬
船海工程 2016年6期
關鍵詞:船舶
吳興亞,高霄鵬
(海軍工程大學 艦船工程系,武漢 430033)
全回轉槳初始安裝偏角對船舶操縱性的影響
吳興亞,高霄鵬
(海軍工程大學 艦船工程系,武漢 430033)
針對全回轉螺旋槳設計4種初始安裝方案,通過在開闊水域開展船模回轉、Z形操舵的大尺度自由自航模試驗,對比各方案的回轉直徑、橫傾角及速降等試驗參數和相關性能指數,結果表明,當螺旋槳的初始安裝位置為相對船艏呈外八字2°時,船舶的操縱性能較為優異。
全回轉螺旋槳;初始安裝偏角;船舶操縱性;自航模試驗
一艘船的固有操縱性在設計建造完成之初就已經確定,主要由船體主尺度、艉部線型,以及槳、舵的尺寸大小、位置布置決定。對于常規槳、舵分離的船型,合理布置槳、舵的相對位置可極為有效地改善船舶的固有操縱性能,一些驅護艦型的設計經驗更直接表明,舵適當合理外偏能縮小其定常回轉直徑[1-2]。而對于全回轉槳吊艙推進器這一新型的船舶推進系統[3-7],未見有文獻對全回轉槳初始安裝偏角對船操縱性能的影響進行研究。
為探究全回轉槳不同初始安裝偏角對船舶操縱性能的影響,根據布置在船尾一對全回轉對轉螺旋槳相對位置的變化,設計螺旋槳的4種偏角作為初始狀態,通過船舶自航模試驗,分別針對每種螺旋槳初始狀態進行回轉試驗、Z形操縱試驗,探究確定螺旋槳初始偏角的最佳方案,為船舶操縱性能的優化提供參考依據。
1 試驗方案設計
本試驗共設計4種螺旋槳初始偏角作為初始位置的方案,分別為平行布置(偏角為0°)和相對船艏呈外八字形布置(偏角依次為2°,3°,4°)2種基本狀態。2種槳基本位置布置見圖1。2槳均為全回轉對轉槳,鋁合金材質,前槳為5葉螺旋槳,后槳為4葉螺旋槳。4種方案的全回轉螺旋槳初始狀態見表1。
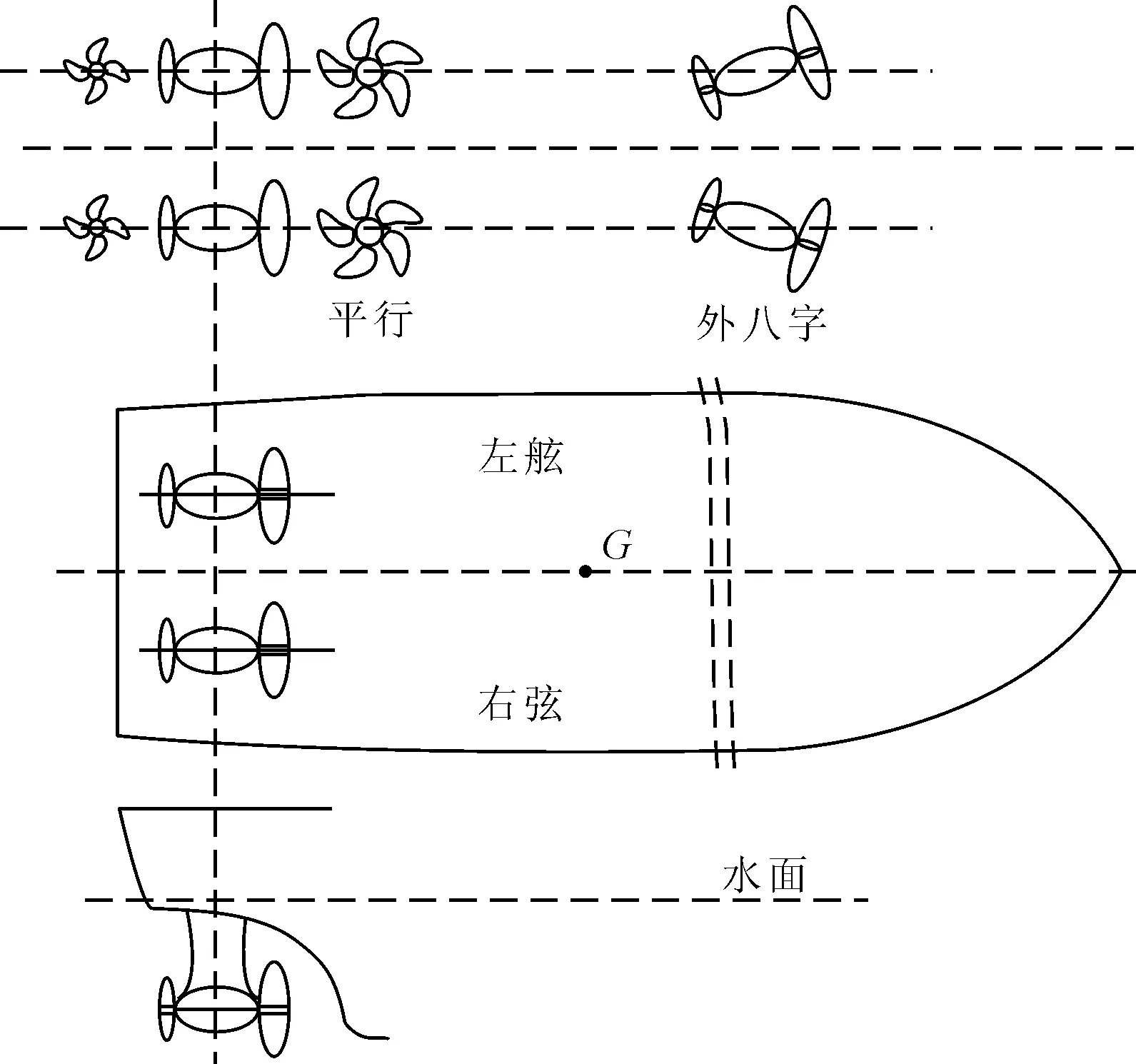
圖1 2種槳位置布置示意
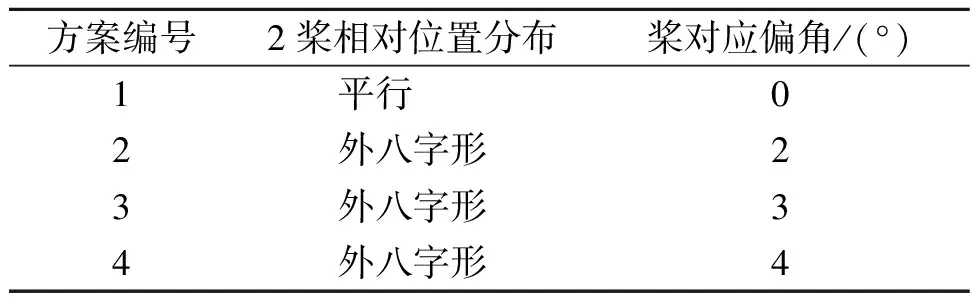
方案編號2槳相對位置分布槳對應偏角/(°)1平行 02外八字形23外八字形34外八字形4
2 自航模試驗
2.1 試驗模型
自航船模采用玻璃鋼材料制作,船模表面光滑,線型制作符合“水面自航模操縱性試驗規程”CB*/Z 327—82的要求。自航船模量綱一的量化主要參數見表2。
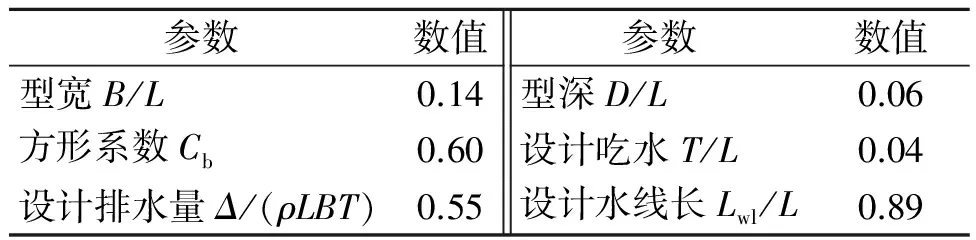
表2 自航船模量綱一的量化主要參數
2.2 控制系統
自航模測控系統全部由計算機完成對船模的操控及運動參數的采集。自航模控制系統由岸上基地操縱系統、船載執行系統、數據采集系統組成,其中采用GPS定位系統記錄船舶軌跡,標稱平面橢圓誤差為2 cm;采用慣導系統測量模型的相關運動參數;采用超聲波式浪高儀測定試驗現場的浪高、流速;采用YGY-FSXY1風速風向儀測量試驗現場風速風向。數據傳輸采用無線通訊設備,將記錄數據及時傳回岸基控制系統,主要采集數據參數包括:傾角、航速、航向、坐標位置、三軸加速度、三軸角速度、舵機的轉舵時間和轉舵的角度、主推電機轉速、主機的運行工況等。
3 試驗及影響分析
3.1 試驗內容

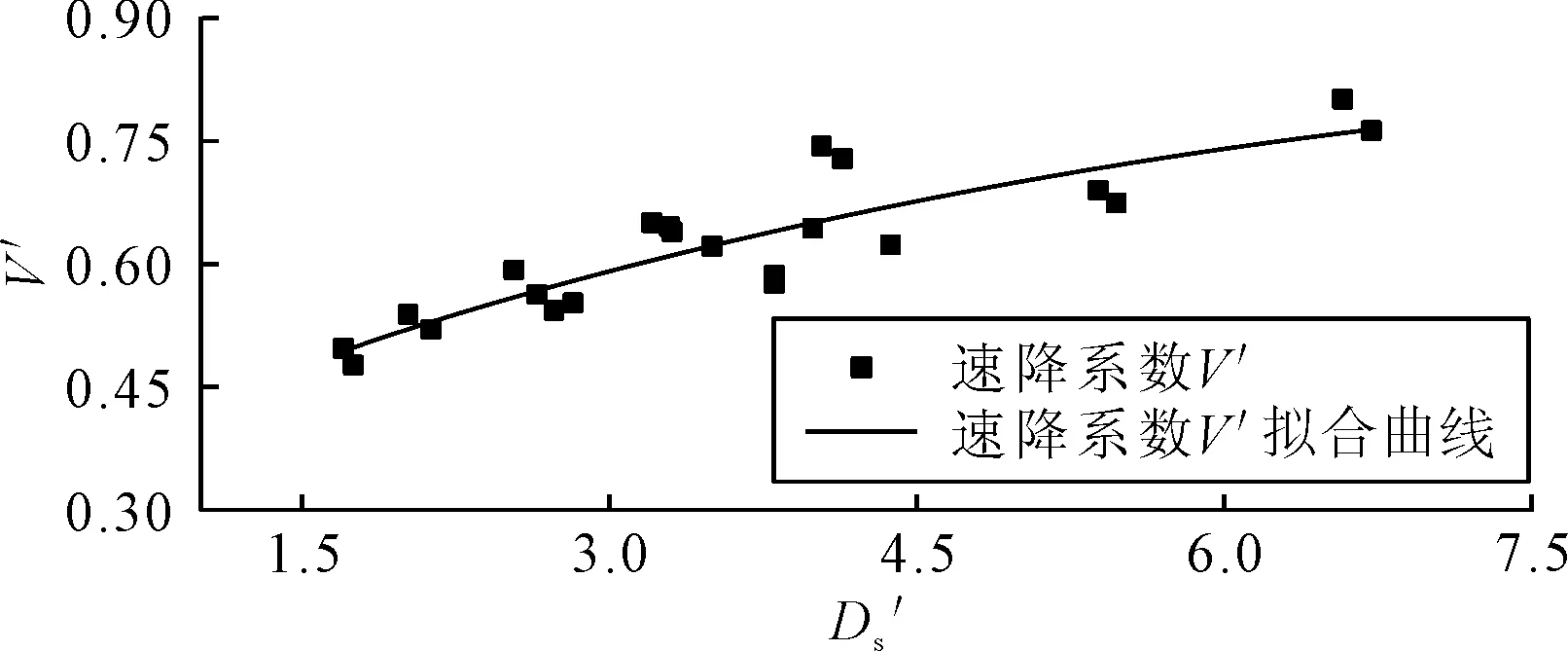
圖2 回轉速降與直徑的關系
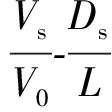
回轉試驗中定常回轉航速Vs與定常回轉半徑Rs、橫傾角φs的關系見圖3。
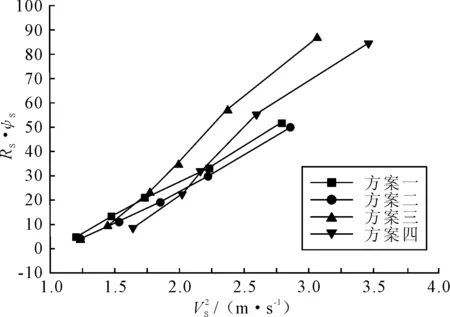
圖3 定常回轉航速與定常回轉半徑和靜橫傾角乘積的關系
(1)
式中:h——船的橫穩定中心高; ZG——船重心距船基線的垂直距離; ZH——水動力作用點到船基線的垂直距離。
圖2、3體現出的曲線關系表明本試驗4種方案的設計能滿足船舶的一般操縱規律,試驗結果的離散程度可以滿足工程上的要求,為測量結果的分析比較開展提供了理論支持。
3.2 試驗測量數據處理分析
3.2.1 回轉試驗
根據船模作定常回轉運動得到的數據結果,作出4種方案下各參數的時歷曲線,如圖4所示為方案1下打左舵15°時船體作回轉運動時的各參數時歷曲線。由圖4分析可得船體作左向15°的定常回轉運動,回轉過程中回轉角速度穩定在6.1~6.2rad/s。在回轉過程中由于船舶所受水動力的變化,船在打舵后2.4s時先向回轉內側橫傾,在3.8s時達到最大角度為-1.3°,然后轉為向外側橫傾,在8.2s時橫傾角達到最大值度,此時的角度稱為最大橫傾角,繼而船舶進入定常回轉狀態,橫傾角穩定在3.0°~3.2°,此時的角度為定常回轉橫傾角,同時,縱傾角也經歷相似的變化過程,最后穩定在0.45°~0.48°,以上各參數在受到試驗現場風、浪、流等外在因素的影響下會有微小的波動,但均符合船舶作回轉運動的一般操縱規律,同樣方案2~4也遵循上述運動規律,這也為下文各方案測量結果的分析比較的開展提供了理論支持。
圖5為4種方案下無因次定常回轉直徑隨舵角的變化關系曲線,圖6為不同回轉角度下無因次定常回轉直徑各方案的對比。
圖4 回轉運動中各參數的時歷曲線 (U=2.3 m/s 、δ=-15° )
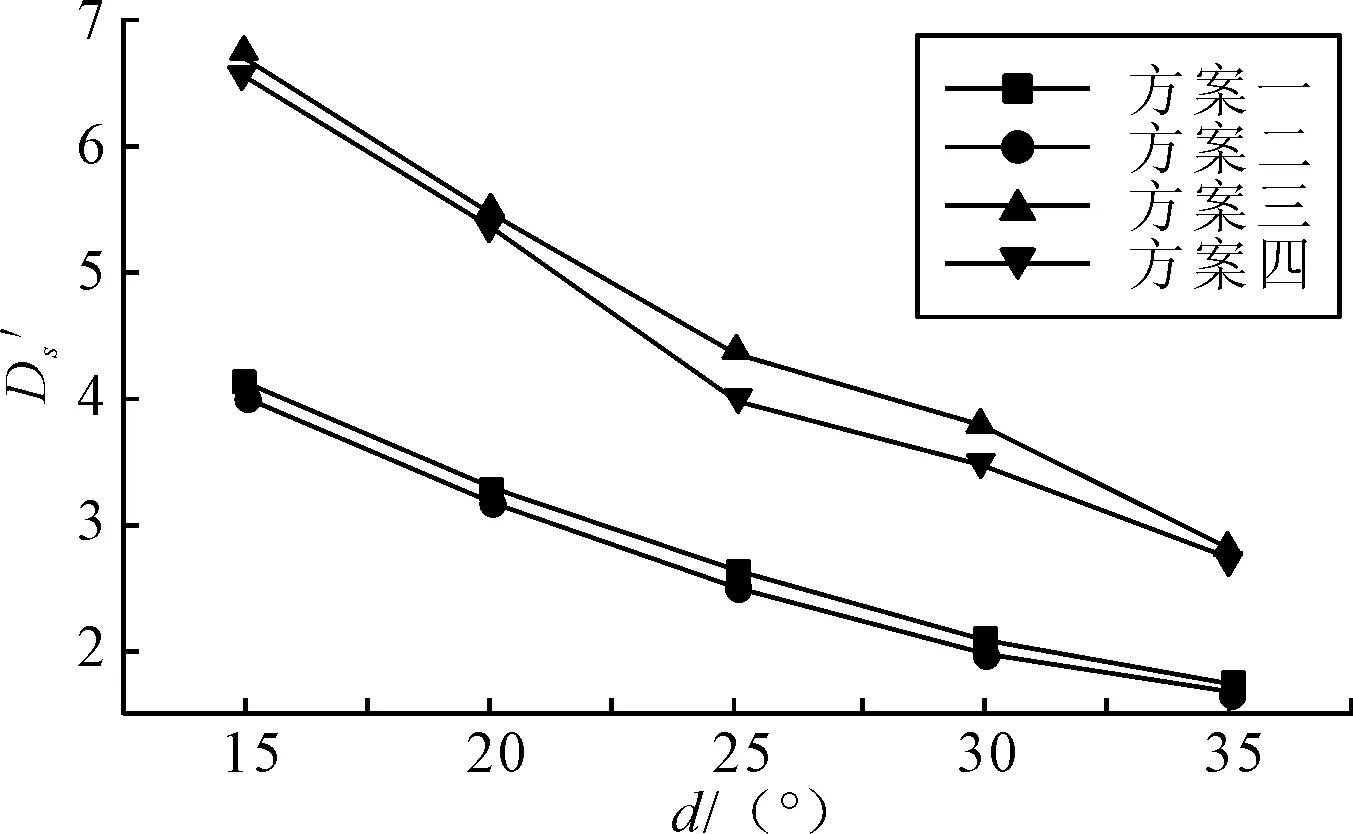
圖5 各方案下無因次定常回轉直徑與舵角的關系
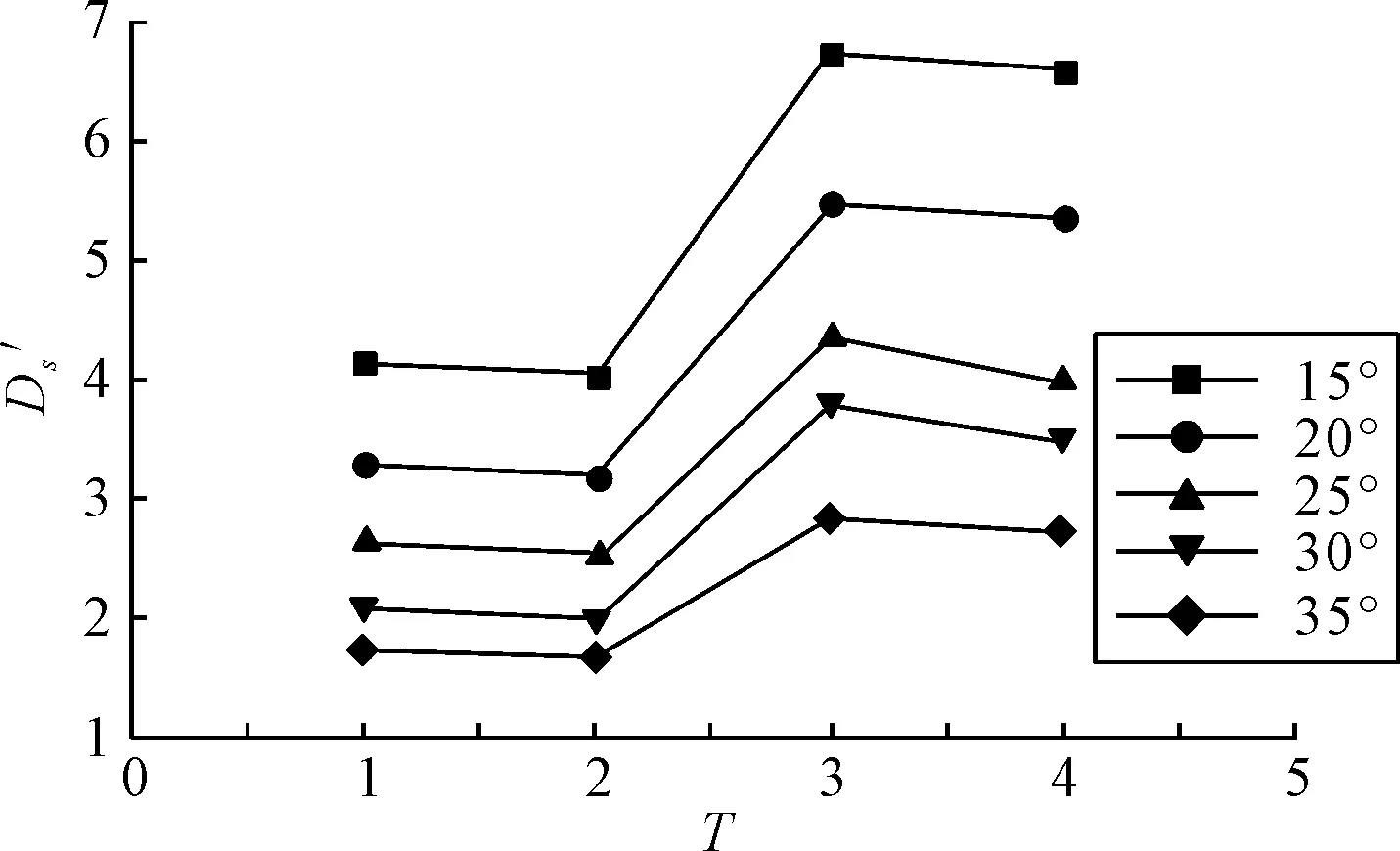
圖6 +25°回轉舵角下無因次定常回轉直徑各方案對比
由圖5分析可得:在4種方案下,均遵循隨著所操舵角的不斷增大,無因次定常回轉直徑不斷減小的船舶操縱規律;結合圖6知,試驗中操相同舵角,當螺旋槳的初始安裝位置為相對船艏呈外八字3°、4°時,船舶的無因次定常回轉直徑較安裝位置為平行、外八字2°時明顯變大,其中當螺旋槳的初始安裝位置為相對船艏呈外八字2°時最小,相比平行位置減小3%~5%,呈外八字3°時最大,相比平行位置增大56.9%~58.6%。
各方案下橫傾角隨舵角的變化以及不同回轉角度下橫傾角的各方案對比見圖7~10。
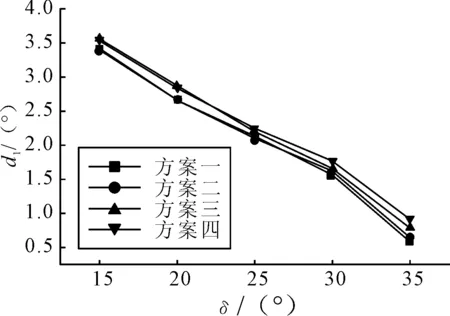
圖7 各方案下靜橫傾角與舵角的關系
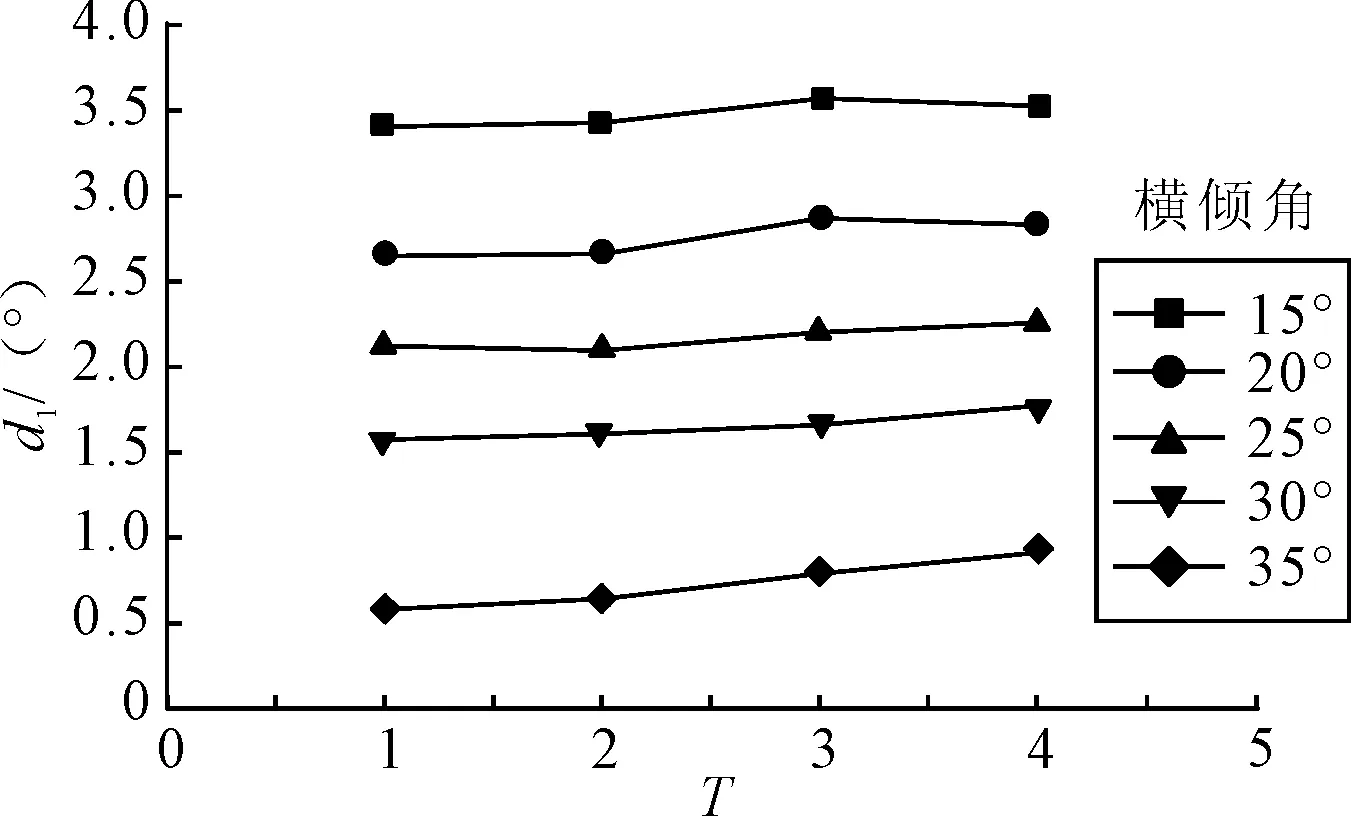
圖8 +25°回轉角度下靜橫傾角各方案對比
由圖8分析可得:在同一全回轉槳初始安裝偏角下,隨著所操舵角的不斷增大,靜橫傾角均不斷減小,結合圖9知,同一舵角下,當螺旋槳的初始安裝位置為相對船艏呈平行、外八字2°時靜橫傾角值較為相近,相對較小,呈外八字3°、4°時靜橫傾角值也較為相近,相對較大,比較小時提高50.0%~58.6%。
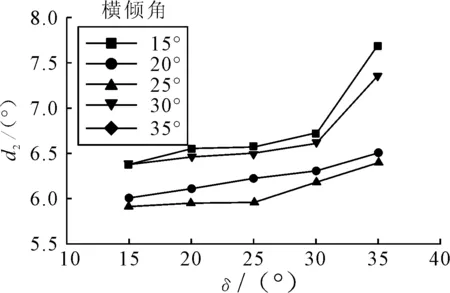
圖9 各方案下最大橫傾角與舵角的關系
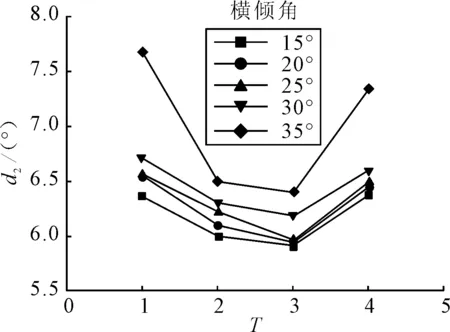
圖10 +25°回轉角度下最大橫傾角各方案對比
由圖9分析可得:在同一全回轉槳初始安裝偏角下,隨著所操舵角的不斷增大,船舶的最大橫傾角不斷增大。結合圖10所體現出的變化規律可知,在同一舵角下,當螺旋槳的初始安裝位置為相對船艏呈外八字2°,3°時,在回轉運動中出現的最大橫傾角相對較小,其中當呈外八字2°時最小,當螺旋槳的初始安裝位置為平行和相對船艏呈外八字4°時,在回轉中出現的最大橫傾角相對較大,其中當呈平行時最大,約比初始位置為外八字2°時大6.2%~18.2%。
圖11~14為4種方案下回轉角速度、回轉速降系數隨舵角的變化關系曲線以及+35°下回轉角速度、回轉速降系數各方案對比。
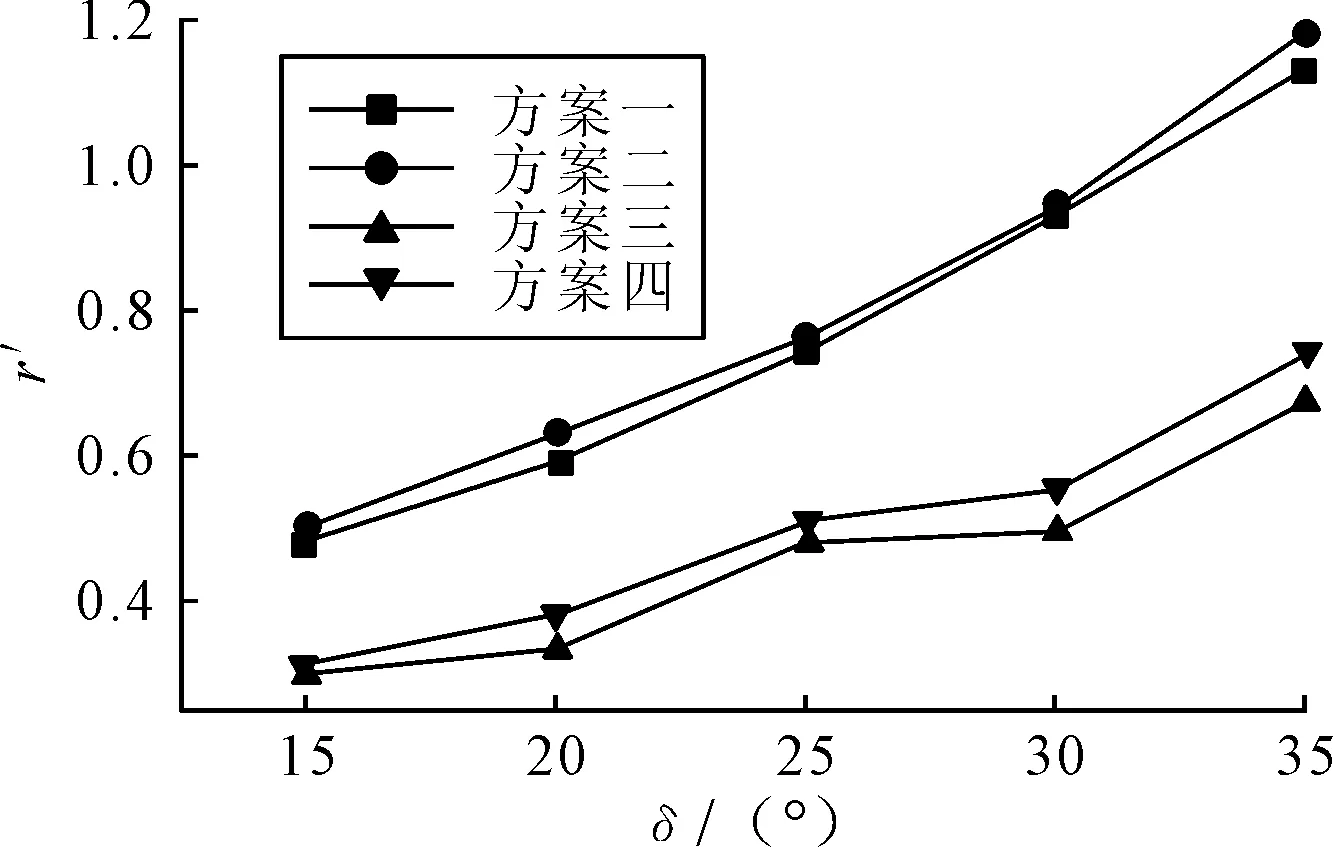
圖11 各方案下無因次定常回轉角速度與舵角的關系
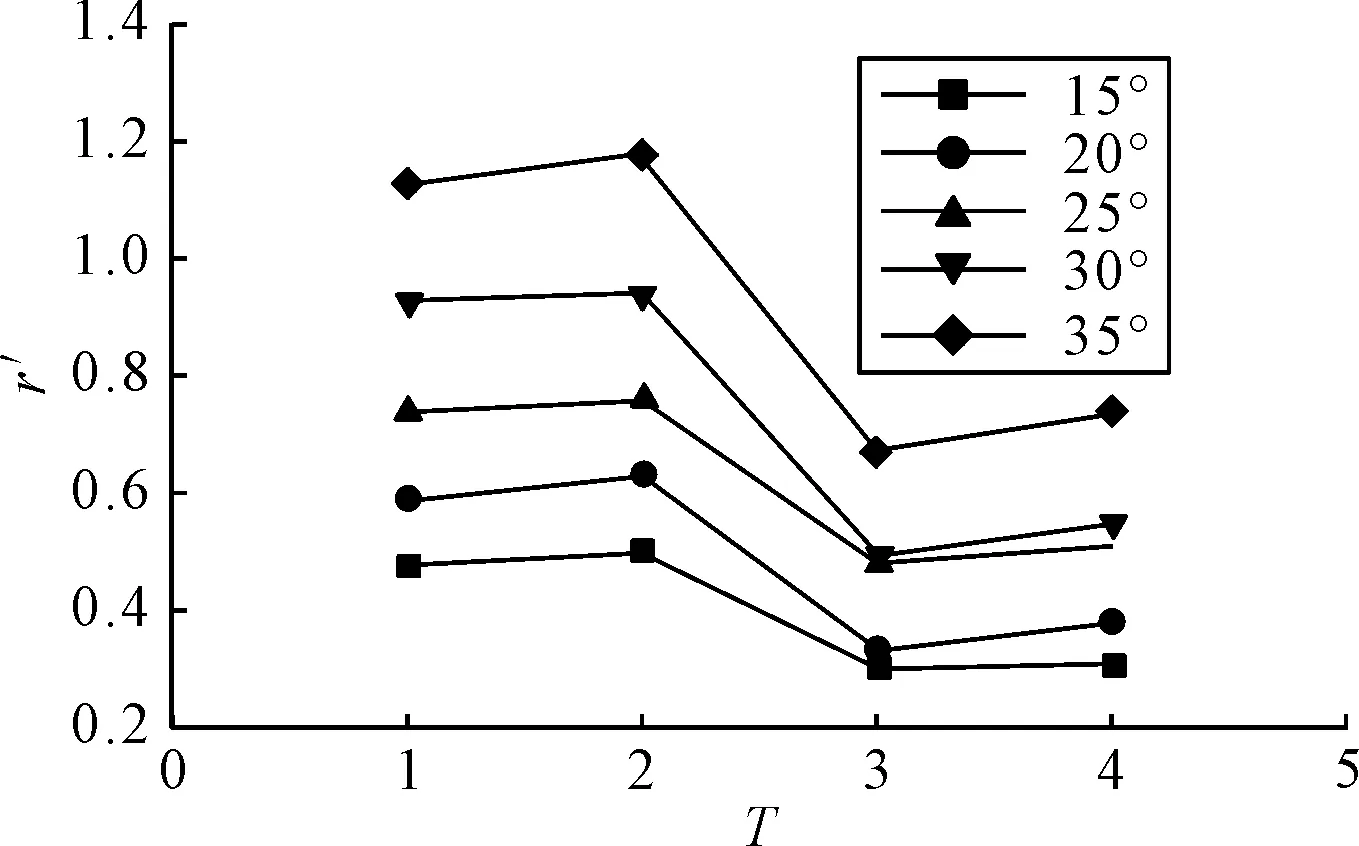
圖12 +35°回轉角度下無因次定常回轉角速度各方案對比
由圖11分析可得:在同一全回轉槳初始安裝偏角下,隨著所操舵角的不斷增大,回轉過程中的回轉角速度顯著增大,其中當當螺旋槳的初始安裝位置為相對船艏呈平行和外八字2°時規律性較為穩定。結合圖12的變化規律可知,在同一舵角下,當螺旋槳的初始安裝位置為相對船艏呈平行、外八字2°時,回轉過程中的回轉角速度較大,其中當呈外八字2°時最大,而當螺旋槳的初始安裝位置為相對船艏呈外八字3°、4°時回轉角速度較小,其中當呈3°時最小,約比呈外八字2°時小40%~43.2%。同時各方案下圖11、圖12中回轉角速度體現出的規律形也與圖9、圖10中定常回轉直徑體現的規律性相符,即船舶作回轉運動時,當回轉角速度越大時,回轉直徑越小。
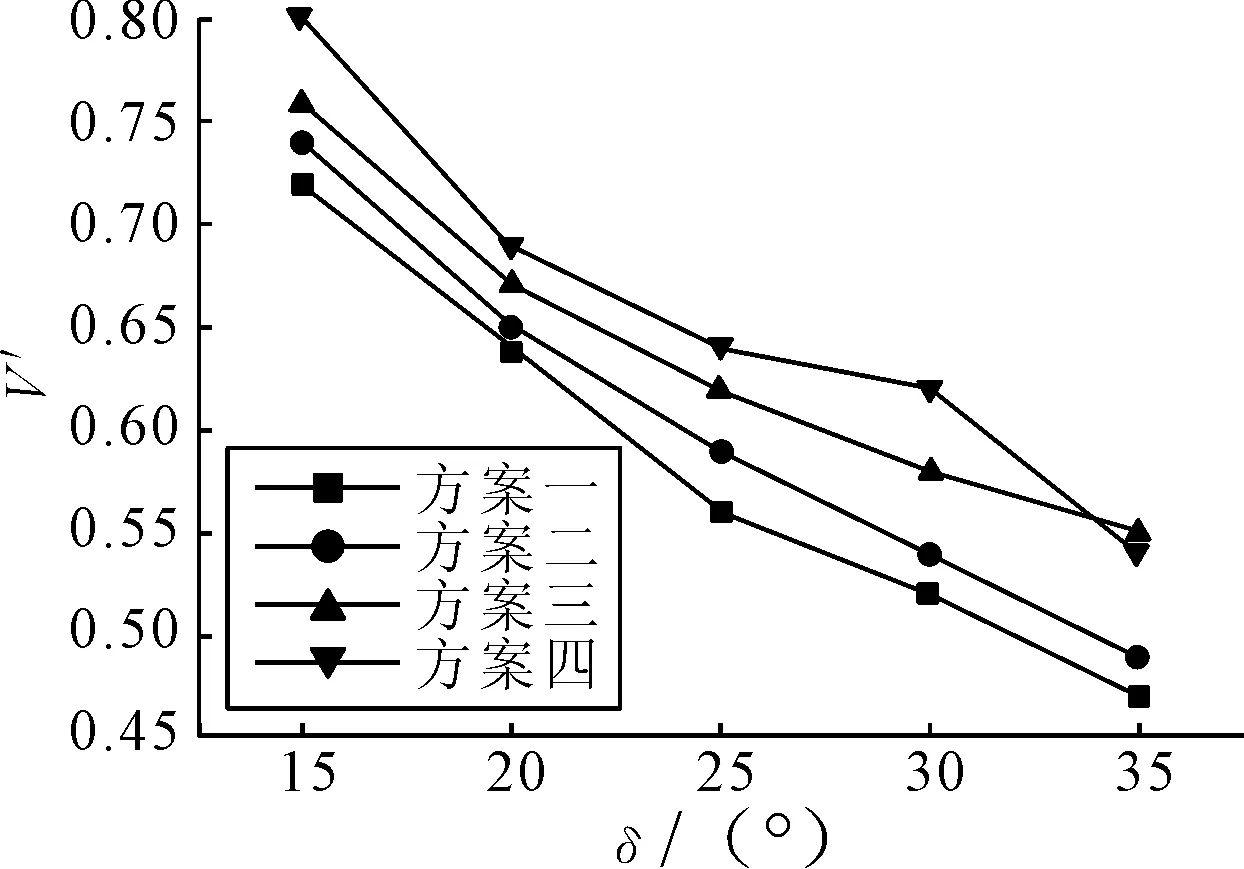
圖13 各方案下定常回轉速降系數與舵角的關系
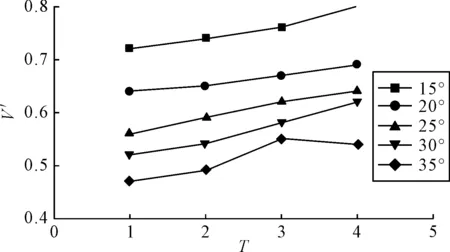
圖14 +35°回轉角度下定常回轉速降系數各方案對比
回轉運動中,回轉速降系數即為船舶定常回轉時的航速與回轉前船舶直線航行時穩定航速之比,所以同一試驗航速下,速降系數越小,船舶定常回轉時的航速越小。由圖13分析可得:在同一全回轉槳初始安裝偏角下,隨著所操舵角的不斷增大,速降系數均逐漸變小。結合圖14可知,同一舵角下,從方案1到方案4,速降系數不斷增大,即回轉航速不斷增大,其中當螺旋槳的初始安裝位置為相對船艏呈外八字4°時比平行時大7.8%~20.0%。
3.2.2Z形操縱試驗
根據船模作Z形運動得到的數據結果,作出4種方案下各參數的時歷曲線,方案1下+20°時軌跡時歷曲線、舵角以及艏向角的時歷曲線見圖15、16。
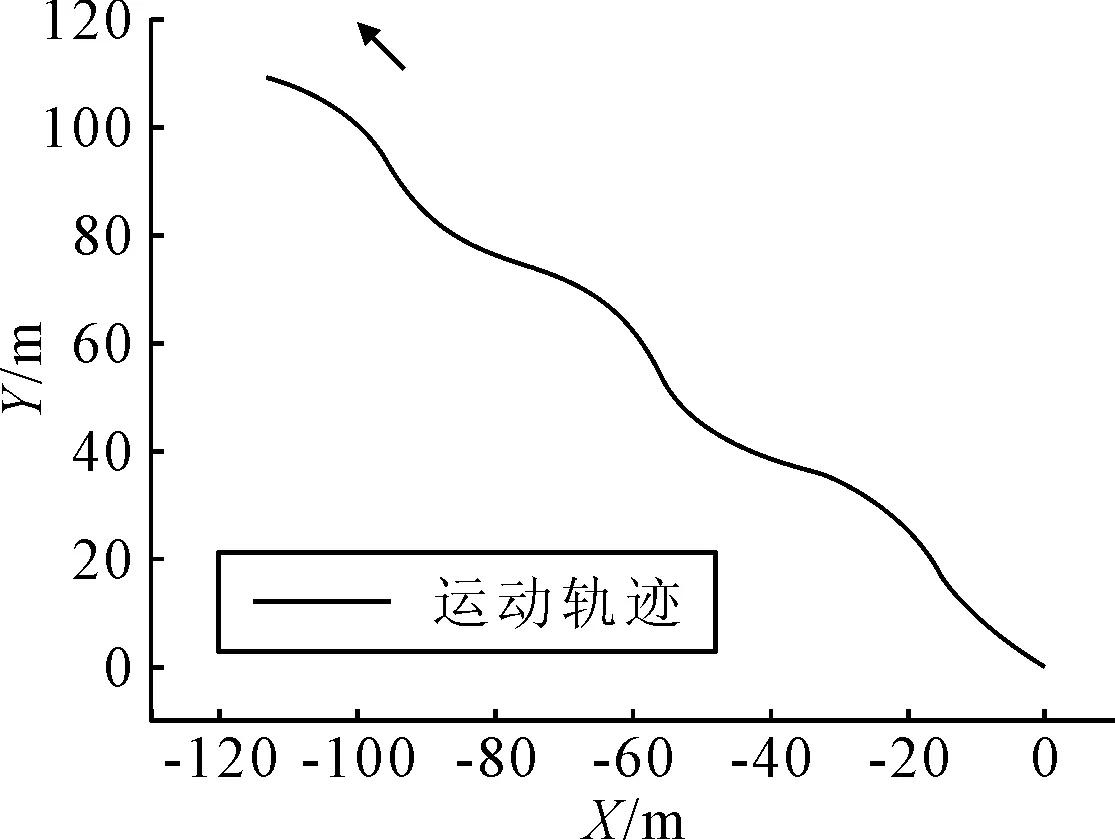
圖15 +20°軌跡時歷曲線
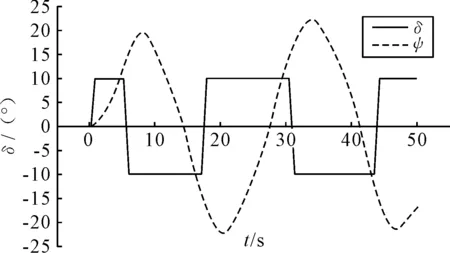
圖16 +20°舵角與艏向角時歷曲線
由時歷曲線可直接測量初轉期ta、超越時間ts、超越角ψs,以及周期T等特征值,并由時歷曲線及各特征值分析出4種方案下的Z形操縱試驗符合船舶的一般操縱運動規律,為進行的K、T指數,以及轉艏性指數P的求解分析比較提供了理論支持。
通常用轉艏性能指數或回轉性指數等技術參數評估船舶的機動性,用航向穩定性指數或穩定性衡準數來表示船舶的航向糾正及保持能力,評估其航向穩定性。其中回轉性指數K越大,定常回轉角速度越大,回轉直徑越小,船的回轉性越好;應舵-航向穩定性指數T越小,表示船舶的穩定性和跟從性越好,操舵后船能很快的進入定常回轉;轉艏性指數P越大,船的轉艏性越好,船越容易改變航向。不同舵角的Z形操縱試驗中所求K、T指數不同,但兩者變化率近似相同,導致轉艏性指數P比較穩定,而轉艏性指數P僅與舵效及船的慣性相關,與船的穩定性無直接關系。4種方案下無因次回轉性指數K′、無因次應舵-航向穩定性指數T′以及轉艏性能指數P在不同舵角下的數值見表3~5。
在+20°角度下無因次回轉性指數K′、無因次應舵-航向穩定性指數T′以及轉艏性能指數P各方案對比見圖17~19。
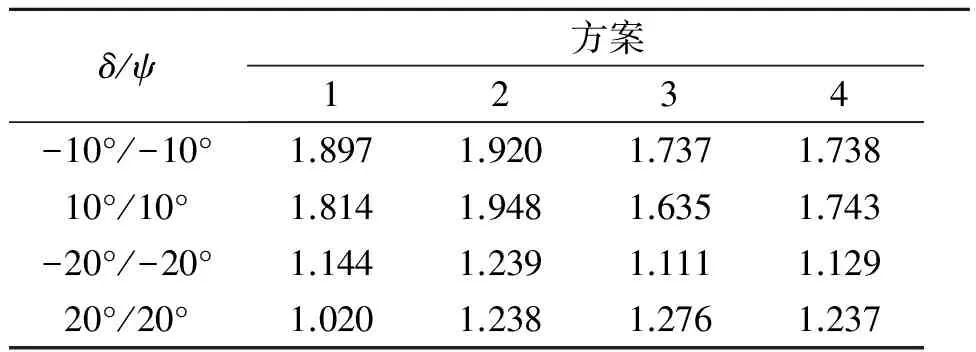
表3 無因次回轉性指數K′在不同舵角δ下的數值
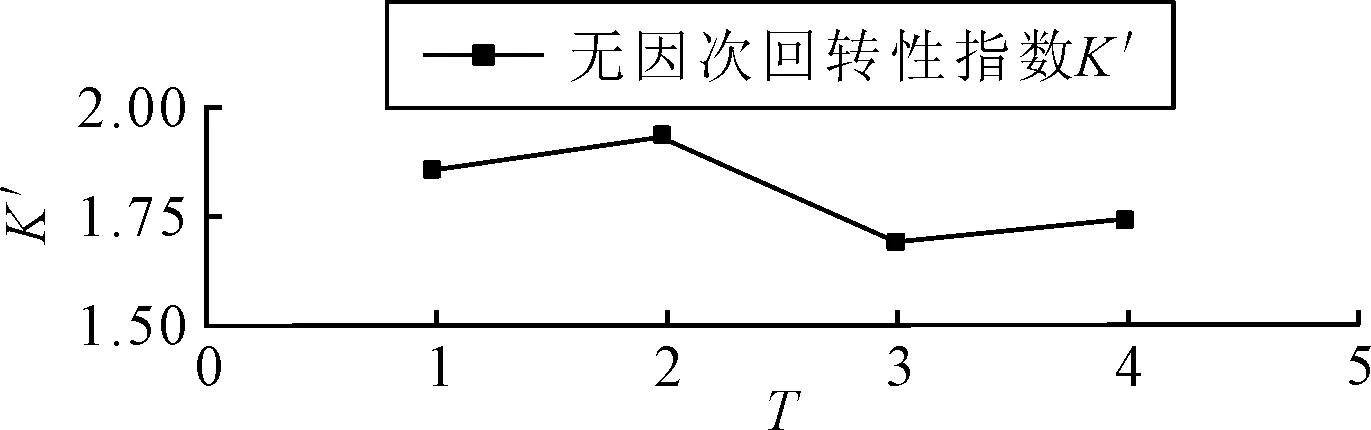
圖17 10°/10°無因次回轉性指數K′各方案對比
由表3可得:在各方案下,無因次回轉性指數隨著舵角δ從10°增大到20°明顯減小。根據《艦船通用規范》規定,水面艦船轉艏性能是以其最大設計航速下作10°/10°Z形試驗的轉艏性指數來衡準,結合圖17,10°/10°下無因次回轉性指數各方案對比可知,在相同舵角下,當螺旋槳的初始安裝位置為相對船艏呈平行、外八字2°時,K′相對較大,呈外八字3°,4°時,K′相對較小,其中當螺旋槳的初始安裝位置為相對船艏呈外八字2°時最大,回轉性最好,外八字3°時最小,回轉性最差。
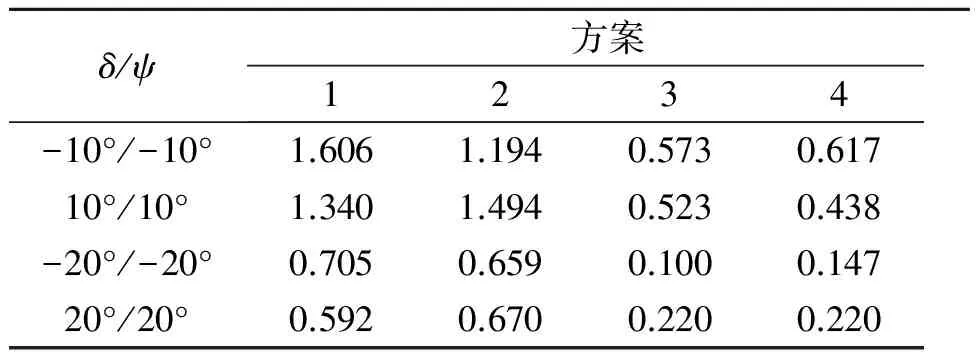
表4 無因次應舵-航向穩定性指數在不同舵角δ下的數值
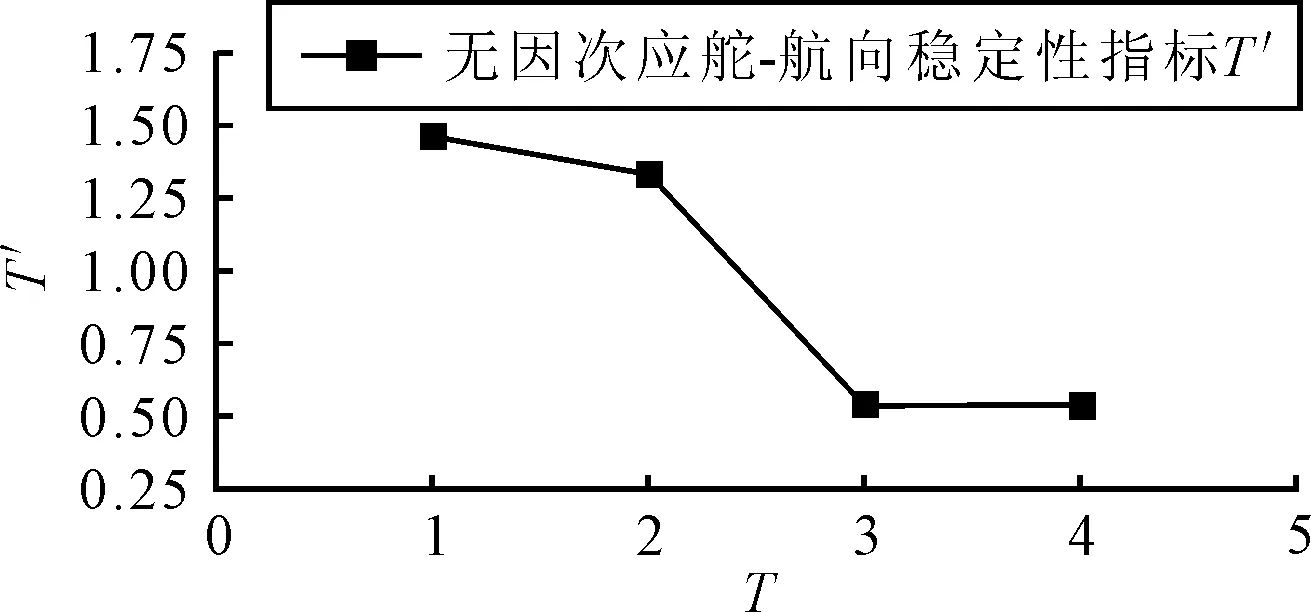
圖18 10°/10°下無因次應舵-航向穩定性指數各方案對比
由表4分析可得:在各方案下,無因次回轉性指數T′隨著舵角δ從10°增大到20°明顯減小,即應舵時間明顯減少。結合圖18,10°/10°下無因次應舵-航向穩定性指數T′各方案對比所示,同一舵角下,當螺旋槳的初始安裝位置為相對船艏呈平行、外八字2°時,T′相對較大,呈外八字3°、4°時,T′相對較小,且值較為接近,其中當螺旋槳的初始安裝位置為相對船艏平行時最大,應舵性最差,外八字3°時最大,應舵性最好。
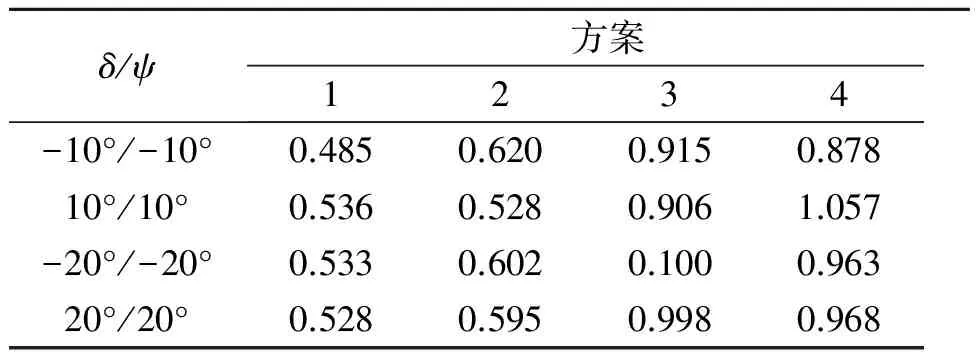
表5 轉艏性能指數P在不同舵角δ下的數值
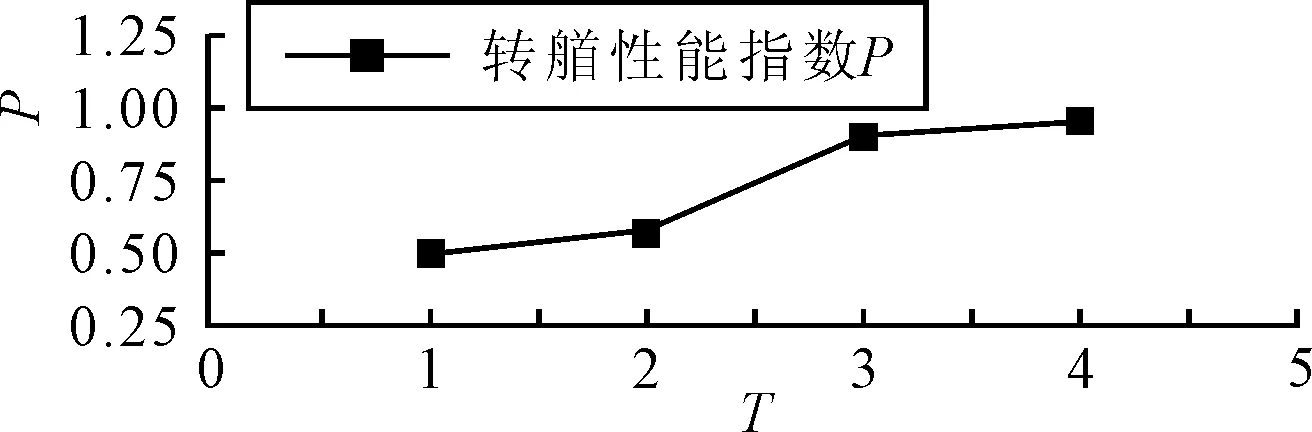
圖19 10°/10°轉艏性能指數P各方案對比
由表5分析可得:由于轉艏性指數P僅與舵效及船的慣性相關,故在4種方案下不同舵角的Z形操縱試驗中轉艏性指數P均比較穩定,均滿足《艦船通用規范》中P值大于0.3的規范要求。結合圖19,10°/10°下轉艏性能指數P各方案對比表明,同一舵角下,當螺旋槳的初始安裝位置為相對船艏呈平行、外八字2°時,P值較為接近,相對較小;呈外八字3°,4°時,P值也較為接近,相對較大,約提高超過71.6%。試驗中發現該裝有全回轉對轉槳的船的直線航行性能較常規槳舵分開船型較差,而對于直線不穩定或穩定性較差的船,轉艏指數必須與表示穩定性的指數聯合應用,才能全面反應操縱性能。
4 結論
在自航模試驗的基礎上對實驗數據做了具體的的分析對比,得出初步的全回轉吊艙推進器操縱性能優化的安裝方法,下一步將采用數值模擬仿真的方法分析螺旋槳周圍的流場變化,并從水動力出發重點分析不同安裝偏角下的螺旋槳及船體的受力情況,以期待能在安裝此類新型推進裝置的船舶操縱性能方面得出更好的優化方案。
[1] YUMMURO A. Influences of propeller and rudder on maneuvering stability derivatives[J]. Journal of the society of naval architects of Japan, 1980,148:80-91.
[2] MORI M. Calculation of normal force of rudder behind propeller[J]. Journal of the Kansai Society of Naval Architects,1974,153:81-89.
[3] 劉洪梅.吊艙推進與傳統推進船舶操縱性能對比分析[J].船舶力學,2011,15(5):463-467.
[4] 馬志堅.Z軸全回轉螺旋槳拖船操縱性能分析及應用[J].船海工程,2002.
[5] 霍虎偉.航海模擬器中全回轉拖輪操縱運動建模與仿真[D].大連:大連海事大學,2013.
[6] 鄭巢生.全回轉吊艙推進器回轉狀態水動力性能預報[C].第十三屆全國水動力學學術會議暨第二十六界全國水動力學研討會文:F集.上海:水動力學研究與進展雜志社,2014-08.
[7] 王文濤.全回轉吊艙推進器性能預報:仿真與試驗研究[J].造船技術,2012.
[8] 范尚雍.船舶操縱性[M].北京,國防工業出版社,1988.
Influence of Initial Installation Angle of the Full-revolving Propeller upon the Ship Maneuvering
WU Xing-ya, GAO Xiao-peng
(Dept. of Naval Architecture Engineering, Naval University of Engineering, Wuhan 430033, China)
Specific to the influence of different full-revolving propeller’s initial installation angle of the ship maneuverability, four initial installation schemes of propeller were designed. In each case, the free-running model tests, including circle test and the zigzag test were carried out in the open and still water to investigate its test parameters, such as tactical diameter, roll angle, speed drop and relative performance index. Experimental results showed that the ship’s maneuverability is excellent when the initial installation site of propeller is toe-out 2° relative to the bow.
full-revolving propeller; initial installation angle; ship maneuverability; free-running model test
10.3963/j.issn.1671-7953.2016.06.003
2016-04-13
吳興亞(1992—),男,碩士生
U661.33
A
1671-7953(2016)06-0009-06
修回日期:2016-05-11
研究方向:船舶與海洋結構物設計制造
E-mail:282294867@qq.com
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30