變體飛行器切換線性變參數(shù)魯棒H∞控制器
2017-01-03 08:45:34何墉章衛(wèi)國王敏文史靜平呂永璽
西北工業(yè)大學學報 2016年6期
何墉, 章衛(wèi)國, 王敏文, 史靜平, 呂永璽
1.西北工業(yè)大學 自動化學院, 陜西 西安 710029; 2.洛陽理工學院 電氣工程與自動化系, 河南 洛陽 471023 3.飛行器一體化技術(shù)重點實驗室, 陜西 西安 710072
變體飛行器切換線性變參數(shù)魯棒H∞控制器
何墉1,2, 章衛(wèi)國1, 王敏文3, 史靜平1, 呂永璽1
1.西北工業(yè)大學 自動化學院, 陜西 西安 710029; 2.洛陽理工學院 電氣工程與自動化系, 河南 洛陽 471023 3.飛行器一體化技術(shù)重點實驗室, 陜西 西安 710072
針對變體飛行器在不同的機體構(gòu)型其控制目標不同,提出了一種基于平均駐留時間方法的切換線性變參數(shù)(switching linear parameter varying, SLPV)魯棒H∞控制方法。 該方法根據(jù)變體飛行器的任務模式及性能指標要求把后掠角變化范圍分成不同的區(qū)域, 在不同的區(qū)域根據(jù)相應的控制目標給出系統(tǒng)滿足魯棒H∞控制性能指標可解的條件及相應的LPV(LPV modeling of morphing aircraft)控制器, 并用平均駐留時間方法保證變體過程的穩(wěn)定性。仿真結(jié)果表明飛行器在變體過程中具有良好的魯棒性和操縱性能。
變體飛行器;多目標控制;魯棒H∞控制;LPV控制器;平均駐留時間
變體飛行器是一類能夠根據(jù)飛行條件和飛行任務而改變其氣動外形,始終以最優(yōu)的飛行狀態(tài)在大范圍變化的飛行環(huán)境中完成多種飛行任務[1]。變體飛行器的變體過程主要通過改變機翼的氣動外形來實現(xiàn),機翼形狀的改變使得飛行器本體參數(shù)如翼面面積、重心位置都隨著翼型的改變而改變,由此產(chǎn)生的氣動力和動量矩(積)隨之發(fā)生變化[2],這為變體飛行器的控制帶來新的挑戰(zhàn)。因此,為了滿足飛行品質(zhì)的要求,所設(shè)計的飛行控制系統(tǒng)必須確保變體過程中的飛行穩(wěn)定性[3]。
線性變參數(shù)(linear parameter varying, LPV)控制通過實時可測或可估計的系統(tǒng)參數(shù)的變化體現(xiàn)系統(tǒng)的時變特性,可在整個參數(shù)軌跡上實現(xiàn)魯棒穩(wěn)定性和系統(tǒng)的魯棒性,在進行系統(tǒng)分析與綜合時,其最大的優(yōu)勢在于可用線性系統(tǒng)的處理方法解決非線性問題,因此被廣泛地應用于航空、航天系統(tǒng)的控制器設(shè)計與研究中[4-5]。系統(tǒng)的性能如穩(wěn)定性、H∞性能在很大程度上由系統(tǒng)參數(shù)集的大小決定,但當參數(shù)大范圍變換時,單一的LPV控制器將使系統(tǒng)性能變得很差,甚至無法求解。Lu等將LPV控制方法和切換控制理論相結(jié)合,提出了一種參變Lyapunov函數(shù)的切換線性變參控制(switching linear parameter varying, SLPV)方法[6-7],文獻[8]根據(jù)變體飛行器的特點及任務模式把后掠角的變化范圍分成不同的區(qū)域,在各自的區(qū)域分別設(shè)計控制器,變體時通過激活相應區(qū)域的控制器以實現(xiàn)變體過程中的穩(wěn)定性,但該方法在設(shè)計控制器時沒有考慮變體飛行器在不同機體構(gòu)型的控制目標。
變體飛行器相異于常規(guī)飛行器的最大優(yōu)點在于能根據(jù)飛行任務的變化而改變機體構(gòu)型,從而在不同的飛行環(huán)境和飛行任務中始終具有良好的飛行性能。由于不同的任務需求及飛行性能要求對應不同的控制目標,因此不同的機體構(gòu)型其性能指標也不同。文獻[6,9]用不同的權(quán)值函數(shù)來表示F-16戰(zhàn)斗機在不同迎角區(qū)域的期望性能指標,用參數(shù)依賴多Lyapunov函數(shù)方法解決迎角大范圍變化時的飛行器控制問題。文獻[10-11]用遲滯切換和公共Lyapunov函數(shù)方法解決變體飛行器變體的快速性問題及變體過程中的多目標控制問題,但采用公共Lyapunov函數(shù)方法過于保守;而采用遲滯切換策略時,切換面卻因切換序列的不同而不同,這給設(shè)計過程帶來額外負擔,而平均駐留時間方法可彌補上述兩種切換策略的不足,解決變體飛行器變體過程中的多目標控制問題。
1 變體飛行器LPV建模
基于如圖1所示的某型變后掠翼無人機進行研究, 機翼后掠角χ的變化范圍為15°~60°, 這里給出該變體飛行器的縱向短周期非線性動力學模型[10-11]:

圖1 變后掠翼飛行器
(1)
對其用Jacobian線性化方法可以得到變體飛行器縱向短周期在平衡點處的線性小擾動方程為
(2)
式中,Δα、Δq和Δδe分別為狀態(tài)向量和控制向量相對于平衡點處的偏差量。為描述變體動作對飛行器的影響, 在后掠角變化范圍內(nèi)每隔5°作為一個考察基準, 運用CFD軟件計算每種構(gòu)型下的氣動參數(shù)。為便于分析氣動參數(shù)和χ的關(guān)系, 把變體過程中重心位置的變化對飛機的影響換算為相應構(gòu)型氣動參數(shù)的變化。因此, 以后掠角作為調(diào)度參數(shù), 定義ρ=χ, 可得到變體飛行器的LPV模型

(3)
2 基于參數(shù)依賴Lyapunov函數(shù)方法的切換LPV控制器設(shè)計
2.1 問題描述
考慮如下形式的切換LPV系統(tǒng)模型
?ρ∈pi
(4)

(5)
式中,xk∈Rnk為控制器的狀態(tài)。當參數(shù)變化到某個區(qū)間,激活相應的控制器。因此,在每個參數(shù)子區(qū)域pi內(nèi)閉環(huán)系統(tǒng)描述為
(6)

2.2 基于平均駐留時間方法的控制器設(shè)計
定理1 給定標量λ0>0,μ>1,考慮開環(huán)線性變參數(shù)系統(tǒng)(4)和變參數(shù)區(qū)域P及子區(qū)域{pi}i∈ZN,令
若對于任意ρ∈pi都存在一組正定對稱矩陣Ri(ρ)和Si(ρ),(i∈ZN)滿足如下條件

(10)
(11)
則存在變參數(shù)控制器使系統(tǒng)(4)切換信號滿足條件
(12)
時在參數(shù)區(qū)域P內(nèi)是指數(shù)穩(wěn)定,且對于λ<λ0時系統(tǒng)滿足加權(quán)H∞性能指標γ
證明對任意參數(shù)子區(qū)域pi(i∈ZN)內(nèi),假設(shè)存在一組參數(shù)相關(guān)正定對稱矩陣函數(shù)Xi(ρ)在其所屬子區(qū)域光滑連續(xù),則閉環(huán)系統(tǒng)(6)對應于該子區(qū)域的Lyapunov函數(shù)可定義為
(13)
線性矩陣不等式(7)~(9)等價于
(14)
并且參數(shù)相關(guān)Lyapunov函數(shù)具有如下形式
式中
對上式作等價變化可得
(15)
由不等(14)式易知
(16)
假設(shè)在時間間隔[0,T]內(nèi)的切換時間序列為0,t1,…,tNσ(0,T),t0=0為初始時刻,則
由(12)式易得閉環(huán)系統(tǒng)(6)指數(shù)穩(wěn)定。
3 仿真驗證
本節(jié)基于前文的變體飛行器切換LPV模型進行仿真研究。根據(jù)變體飛行器的特點及任務模式將后掠角變化范圍分為3個區(qū)域, 區(qū)域劃分為P1:15°≤χ≤30°;P2:30°≤χ≤45°;P3:45°≤χ≤60°,分別對應巡航模態(tài)、中間過渡模態(tài)和沖擊飛行模態(tài)。為體現(xiàn)變體飛行器變體過程中在不同的后掠角區(qū)域有不同的控制目標,分別選擇3個權(quán)值函數(shù)
相應區(qū)域的LPV控制器分別用K1(ρ)、K2(ρ)和K3(ρ)表示。當后掠角變化到相應區(qū)域時,相應的控制器被激活, 并通過相應的權(quán)值函數(shù)實現(xiàn)對變體飛行器的多目標控制。
變體飛行器切換LPV系統(tǒng)的控制結(jié)構(gòu)圖如圖2所示。
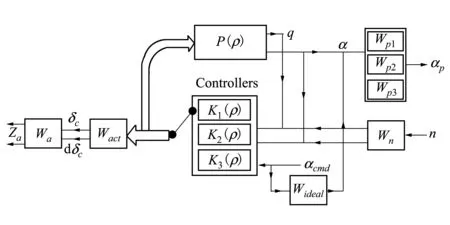
圖2 變體飛行器切換LPV系統(tǒng)的結(jié)構(gòu)圖
其中P(ρ)是變體飛行器縱向短周期的切換LPV模型, 把系統(tǒng)的2個狀態(tài)α和q作為輸出, 跟蹤的理想模型:
其輸出αideal和實際迎角輸出α的差α-αideal作為跟蹤誤差,通過權(quán)值函數(shù)懲罰跟蹤誤差。外部輸入包括二維傳感器噪聲n和迎角指令信號acmd。被控輸出包括開環(huán)加權(quán)誤差信號αp和za,這樣就可將跟蹤問題轉(zhuǎn)化為外部輸入和被控輸出之間的H∞控制問題。圖2中作動器動態(tài)模型Wact取為
控制輸入的懲罰函數(shù)Wa為
Wa=diag(0.1,0.2)
設(shè)各子區(qū)域pi(i為所在區(qū)域編號)所對應的參數(shù)依賴Lypunov函數(shù)矩陣Xi(ρ)為
Ri(ρ)=Ri0+ρRi1Si(ρ)=Si0+ρSi1
式中,ρ=χ為變體飛行器的后掠角,矩陣Rij和Sij,(j=0,1)是待優(yōu)化求解的矩陣。圖3給出了變體飛行器用本文所用方法在變體過程中對給定指令信號的響應曲線。
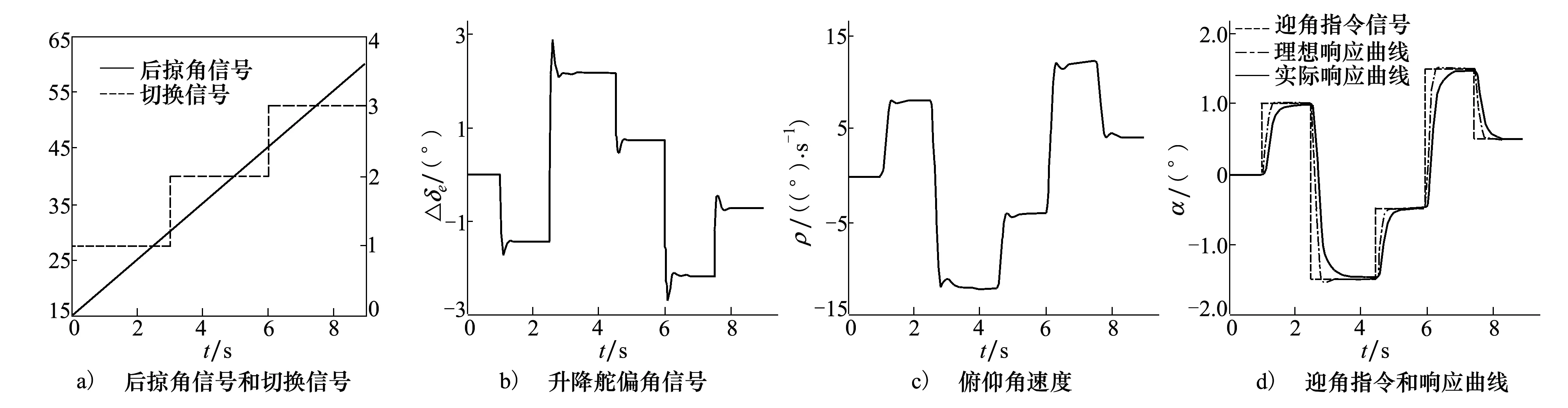
圖3 響應曲線
4 結(jié) 論
本文基于平均駐留時間的方法設(shè)計了變體飛行器切換線性變參數(shù)系統(tǒng)的魯棒H∞控制器,考慮到變體飛行器在不同的后掠角區(qū)域其控制目標不同,在設(shè)計過程中根據(jù)不同的控制目標分別設(shè)計相應區(qū)域的魯棒控制器,并用平均駐留時間方法保證變體過程中的穩(wěn)定性。仿真結(jié)果表明用本文所用方法不但能有效降低系統(tǒng)的保守性,同時可使系統(tǒng)的H∞性能明顯改善,也可實現(xiàn)對指令信號的良好跟蹤。
[1] 陸宇平,何真. 變體飛行器控制系統(tǒng)綜述[J]. 航空學報, 2009, 30(10): 1906-1911 Lu Yuping, He Zhen. A Survey of Morphing Aircraft Control Systems[J]. 2009, 30(10): 1906-1911 (in Chinese)
[2] 樂挺,王立新,艾俊強. Z型翼變體飛機的縱向多體動力學特性[J]. 航空學報, 2010, 31(4): 679-686 Yue Ting, Wang Lixin, Ai Junqiang. Longitudinal Multibody Dynamic Characteritics of Z-Wing Morphing Aircraft[J]. Acta Aeronatuca et Astronautica Sinica, 2010, 31(4): 679-686 (in Chinese)
[3] Seigler T M, Neal D A. Analysis of Transition Stability for Morphing Aircraft[J]. Journal of Guidance, Control and Dynamics, 2009, 32(6): 1947-1954
[4] Lee C H, Shin M H, Chung M J. A Design of Gain-Scheduled Control for a Linear Parameter Varying System: an Application to Flight Control[J]. Control Engineering Practice, 2001, 9(1): 11-21
[5] Aplarian P, Gahinet P, Becker G. Self-ScheduledH∞Control of Linear Parameter-Varying System: a Design Example[J]. Automatica, 1995, 31(9): 1251-1261
[6] Lu B, Wu F, Sung Wan K. Switching LPV Control of an F-16 Aircraft Via Controller State Reset[J]. IEEE Trans on Control Systems Technology, 2006, 14(2): 266-277
[7] Lu B, Wu F. Switching LPV Control Designs Using Mutiple Parameter-Dependent Lyapunov Functions[J]. Automatica, 2004, 40(11): 1973-1980
[8] 王青, 楊匯川, 董朝陽. 基于重疊參數(shù)區(qū)域的變體飛行器切換LPV控制[J]. 沈陽工業(yè)大學學報,2013, 35(6): 698-703 Wang Qing, Yang Huichuan, Dong Chaoyang. Switching LPV Control of Morphing Aircraft Based on Overlapped Parameter Area[J]. Journal of Shenyang University of Technology, 2013, 35(6): 698-703 (in Chinese)
[9] 何旭. 切換線性變參數(shù)系統(tǒng)的H∞控制及其在飛行器系統(tǒng)中的應用[D]. 沈陽:東北大學,2011 He Xu. Control of Switched Linear Parameter Varying Systems and Its Application to Air Vehicle[D]. Shenyang, Northeastern University, 2011 (in Chinese)
[10] 何墉,章衛(wèi)國,王敏文,等. 基于多目標控制的變體飛行器切換線性變參數(shù)控制器[J]. 控制理論與應用, 2015(11): 1518-1525 He Yong, Zhang Weiguo, Wang Minwen, et al. Switching Linear-Parameter-Varying Control for Morphing Aircraft Based on Multi-Objective[J]. Control Theory & Application, 2015, 32(11): 1518-1525 (in Chinese)
[11] 何墉,章衛(wèi)國,王敏文,等. 變體飛行器的切換LPV控制[J]. 西北工業(yè)大學學報, 2015, 33(5):781-787 He Yong, Zhang Weiguo, Wang Minwen, et al. Switching LPV Control for Morphing Aircraft[J]. Journal of Northwestern Polytechnical University, 2015, 33(3): 781-787 (in Chinese)
Switching LPV RobustH∞Controller for Morphing Aircraft
He Yong1,2, Zhang Weiguo1, Wang Minwen3, Shi Jingping1, Lü Yongxi1
1.School of Automation, Northwestern Polytechnical University, Xi′an 710029, Chinab 2.College of Electrical Engineering and Automation, Luoyang Institute of Science and Technology, Luoyang 471023, Chinac 3.Key Laboratory of Science and Technology on Aircraft Control, Xi′an 710072, China
A morphing aircraft has different control objectives in different configurations. For the multi-objective-control problem of the morphing aircraft, a robust controller of theswitchinglinear parameter varying(SLPV) is proposed based on the average dwell time switching scheme in which the range of the sweep angle is divided into sub-regions according to the flight modes and design objectives, and the solvability condition of the problem with a given robust performance indices is established and a group of the LPV controllers is designed accordingly, meanwhile, the average dwell time scheme of switching is adopted to maintain the stability and the control performance of the aircraft in morphing. At last simulation results are used to showthat the designed controller can guarantee the excellent robustness and control performance.
morphing aircraft; multi-objective-control; robust control; LPV controller; average dwell time
2016-04-19
國家自然科學基金(61374032)與航空科學基金(20140753012)資助
何墉(1980—),西北工業(yè)大學博士研究生,主要從事變體飛行器控制方法研究。
V241.62
A
1000-2758(2016)06-1045-05
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52