永磁同步電機相電流測量誤差分析與補償
2017-01-03 02:58:16蔡志端王培良姜媛媛荀博洋
電工技術學報 2016年23期
關鍵詞:測量
蔡志端 王培良 荀 倩 姜媛媛 荀博洋
(1.湖州師范學院工學院 湖州 313000 2.南京航空航天大學自動化學院 南京 211106 3.內蒙古農業大學機電工程學院 呼和浩特 010018)
永磁同步電機相電流測量誤差分析與補償
蔡志端1王培良1荀 倩1姜媛媛2荀博洋3
(1.湖州師范學院工學院 湖州 313000 2.南京航空航天大學自動化學院 南京 211106 3.內蒙古農業大學機電工程學院 呼和浩特 010018)
為減小電流測量誤差,滿足永磁同步電機高性能調速要求,對相電流測量誤差進行了分析與補償。首先,介紹了電流測量誤差產生原理,分析了測量誤差對閉環調速系統性能的影響。然后,提出了一種對d軸電流進行分段積分的補償策略,通過對d軸電流積分得到誤差項,將其補償到測量電流中。仿真和實驗結果表明偏移誤差和增益誤差分別會引起轉矩、轉速在1倍角頻率和2倍角頻率處振蕩,補償策略可以很好地減小測量誤差,從而減小轉矩和轉速周期性振蕩。
測量誤差 偏移誤差 增益誤差 分段積分 周期性振蕩
0 引言
永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)相電流測量在矢量控制算法中扮演著重要角色,其檢測是否準確直接關系到電機驅動器的控制性能[1]。然而電機實際相電流經過采樣調理環節之后難免會存在偏移誤差和增益誤差,引起轉矩和轉速脈動,嚴重影響電機穩態調速性能,測量誤差不僅影響動態性能還影響穩態性能。因此,研究相電流測量誤差及其補償策略有利于提高PMSM的調速性能。
一般情況下,轉速脈動可通過高增益的轉速調節器得到抑制,但在電梯或牽引驅動器中,為保證乘客的舒適性,轉速調節器增益不能太大[2],因此需尋求其他策略減小測量誤差帶來的轉速脈動。
近年來,為減小電流測量誤差,抑制轉矩和轉速脈動,研究學者對減小電流測量誤差進行了研究。可以簡單地通過讀取靜態條件下逆變器的直流偏置來減小偏移誤差[3],然而該方法不能補償增益誤差,且偏移誤差在電機運行過程中動態變化時不能完全補償。文獻[4]通過監測直流母線電流中的交流分量可以得到偏移誤差,但不能測量增益誤差,且需要在直流母線上串接額外的電流傳感器。文獻[5,6]建立系統模型,通過修改轉速調節器輸出的轉矩電流給定值對電流測量誤差帶來的轉矩、轉速脈動進行抑制,但該方法需要精確的電機參數,當電機參數變化或不準確時,補償器可能出現不穩定。文獻[7]采用高頻信號注入策略,但該策略會帶來附加損耗和噪聲。文獻[8,9]采用自適應滑模控制器有效減小了轉矩脈動,但并不能補償電流測量本身帶來的誤差。文獻[10]研究了增益誤差的影響,提出了一種誤差補償策略,但該方法是針對3個電流傳感器檢測的情況,并不能應用于采用兩個電流傳感器進行相電流檢測的情況。文獻[11]采用一種簡單的諧振式觀測器對低定子頻率下存在的電流測量誤差進行補償,并且采用殘余誤差補償器對殘余誤差進行了補償以精確觀測磁鏈。文獻[12]將電流調節器的輸出作為參考電壓值進行誤差補償。
本文針對PMSM中采用兩個電流傳感器進行相電流檢測過程存在的測量誤差進行了研究,分析了電流測量誤差產生原理及其對閉環系統調速性能的影響。為減小轉矩和轉速脈動,提出了一種對d軸電流分段積分的電流測量誤差補償策略,該方法不受電機參數和運行轉速的影響,能有效減小測量誤差引起的轉矩和轉速脈動。
1 相電流測量誤差分析
在PMSM控制系統中,參與運算的三相電流通過電流傳感器采樣,并利用運算放大器進行幅值調節,再經過A-D轉換器輸入到DSP控制器,相電流檢測過程如圖1所示。電流傳感器的非線性、調理電路的熱漂移、A-D轉換器的量化誤差及各相電流的不平衡都會導致電流測量過程出現誤差。
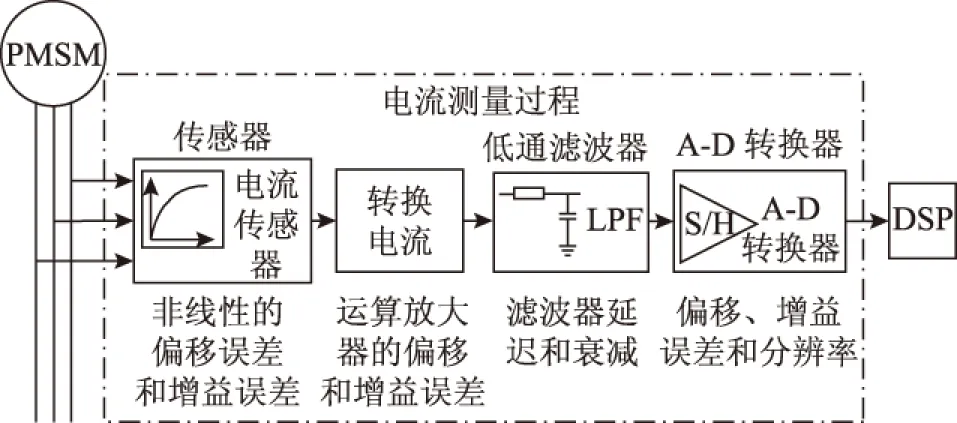
圖1 相電流檢測過程Fig.1 The measurement path of rotor phase current
相電流測量誤差可以分為增益誤差和偏移誤差兩類。增益誤差是在相電流處理過程中,比例增益不相等引起的,包括電流傳感器、運算放大器和測量電路中無源元件的誤差;而偏移誤差是由電流傳感器、運算放大器和A-D轉換器的漂移和殘留造成的,它是一個疊加量[13-15]。因此,考慮誤差時的相電流測量值可表示為
(1)

因此,x相的電流測量值與實際值誤差可表示為
(2)
由式(1)、式(2)可得
(3)
一般只檢測PMSM三相電流中的兩相,假設為A相和B相電流,則C相電流可表示為
(4)

(5)
式中,id、iq為d、q軸的實際電流;Δid、Δiq為誤差值,由Clarke變換和Park變換可得
(6)
Δid、Δiq不僅與Δia、Δib有關,還與電機電角度θe有關,將式(6)展開可得
(7)
式中,θe=2πfet。
1.1 偏移誤差
當電機相電流測量值中包含偏移誤差時,有
(8)
將式(8)代入式(7),可得
(9)
其中
(10)
在dq坐標系下的電磁轉矩方程為
(11)
將式(9)代入式(11),可得
ΔTl=
(12)
由此可見,偏移誤差使得閉環控制系統的電磁轉矩中包含ΔTl分量,由于ΔTl在fe頻率處振蕩,使得電磁轉矩也在fe頻率處振蕩。
1.2 增益誤差
當電機相電流測量值中包含增益誤差時,有
(13)

(14)
由式(7)、式(14)可得
(15)
由式(11)、式(15)可得
(16)
由此可見,增益誤差使得閉環控制系統的電磁轉矩在2fe頻率處振蕩。
1.3 測量誤差對閉環系統的影響
圖2為永磁同步電機矢量控制系統轉速環模型,ΔTl作為負載擾動轉矩,可得擾動作用下的閉環傳遞函數為
(17)
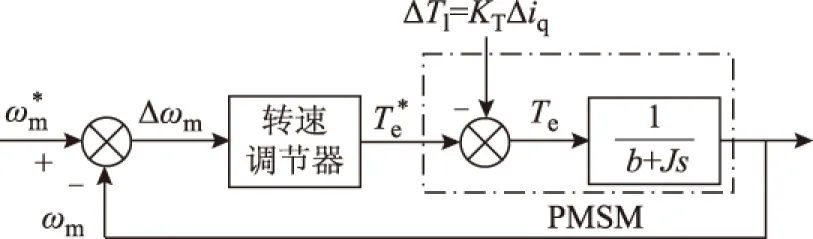
圖2 PMSM轉速環模型Fig.2 Speed loop model of PMSM
為滿足系統無靜差和抗干擾性要求,轉速環采用PI調節器,將系統校正為Ⅱ型系統。因此,式(17)可寫為
(18)
式中,kωp、kωi分別為轉速調節器的比例、積分系數。由此可得頻率響應如圖3所示。
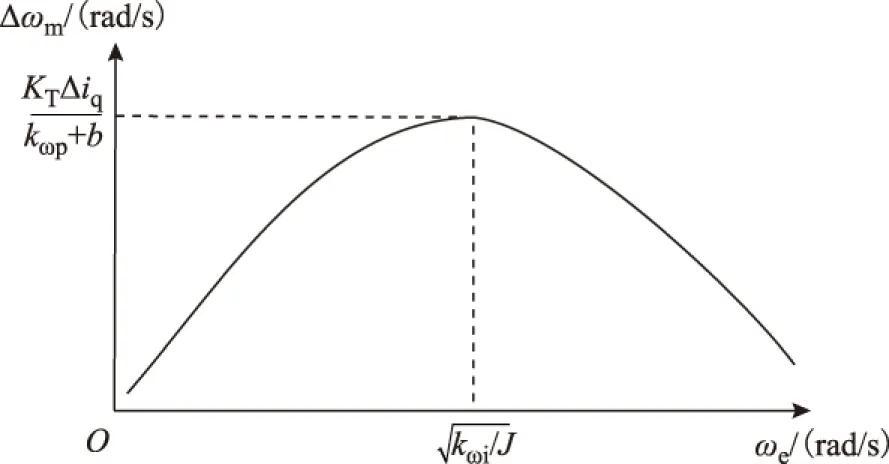
圖3 頻率響應Fig.3 The frequency response
圖3表明低頻時的轉矩脈動可以通過轉速調節器進行調節,而高頻時的脈動可以由電機轉動慣量濾除。最大轉速脈動量為
(19)
2 相電流測量誤差補償策略
2.1 測量誤差計算
d軸電流經過積分調節器后,其輸出為
(20)
式(20)中的d軸測量誤差Δid為式(9)和式(15)之和。
由式(9)、式(15)、式(20)可以看出,d軸電流的脈動量中包含fe、2fe頻率處的脈動量,因此本文選擇iout的積分區間為[0,2π],如圖4所示,iout的積分是一個恒定值,即偏移誤差和增益誤差。
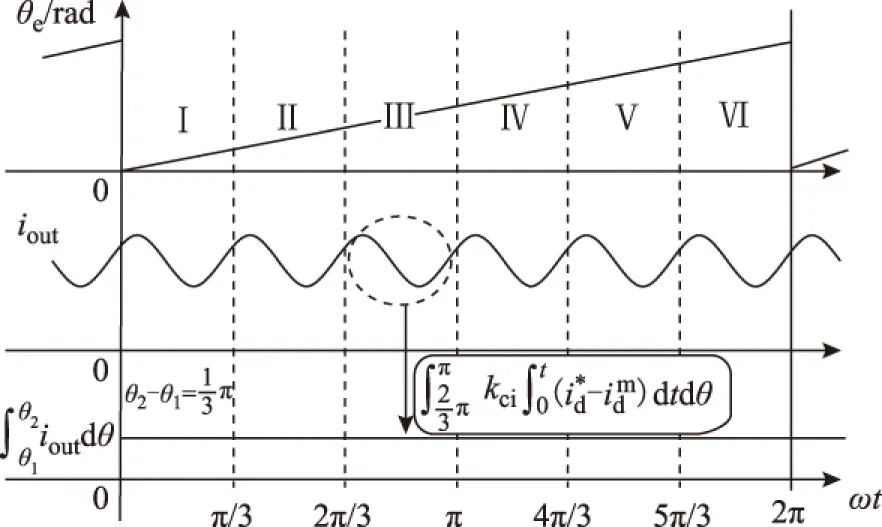
圖4 積分區間選擇Fig.4 The selection of integral interval
2.1.1 偏移誤差計算
對于偏移誤差,需要計算A相和B相的偏移誤差,圖5為誤差計算結果。
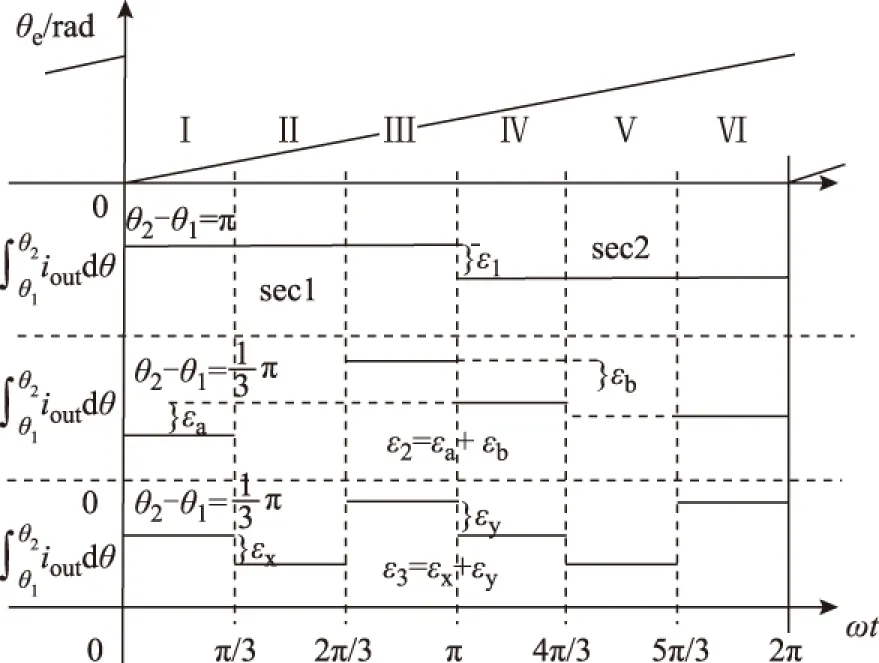
圖5 誤差計算結果Fig.5 Error calculation results
對式(20)進行積分,積分區間選擇每π個電角度,則有
(21)
(22)
將式(21)、式(22)相減,可得
(23)
控制式(23)為零,即可消除A相偏移誤差對相電流測量結果的影響。
對式(20)進行積分,積分區間選擇每π/3個電角度,則有
(24)
由式(24)可得
(25)
同理,控制式(25)為零,即可消除B相偏移誤差對相電流測量結果的影響。
當偏移誤差為零時,則對式(20)每π/3個電角度積分的結果滿足式(26)。
(26)
2.1.2 增益誤差計算
當Ka與Kb相等時,式(15)為零,即dq軸不存在增益誤差。因此,當Ka與Kb不相等時,式(27)可反映
增益誤差。


(27)
由式(27)可得
(28)
2.2 相電流補償
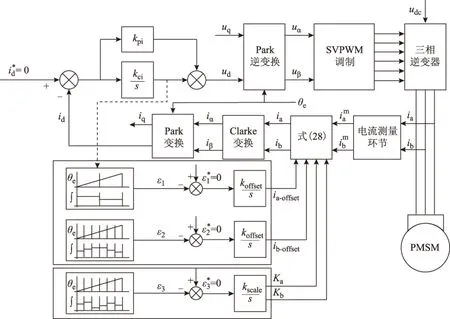
圖6 誤差補償算法Fig.6 Error compensation algorithm
3 仿真與實驗
3.1 仿真驗證
在Matlab2013/Simulink環境下進行系統仿真,電機仿真模型中參數設置參照實際電機參數,見表1。
為分析電流檢測中的測量誤差對閉環系統的影響,對閉環系統進行仿真分析。仿真條件為:Ka=1.1,Kb=0.9,ia_offset=0.05 A,ib_offset=0.02 A,由式(9)和式(15)可得Δid、Δiq的幅值為1.75 A,給定轉速600 r/min,負載轉矩5 N·m。
表1 永磁同步電機參數
Tab.1 The parameters of the PMSM
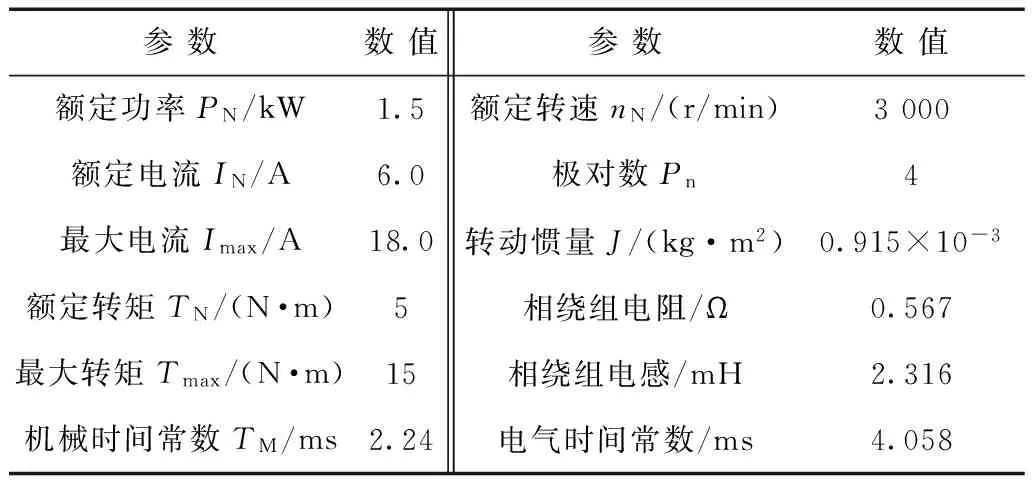
參數數值參數數值額定功率PN/kW1.5額定轉速nN/(r/min)3000額定電流IN/A6.0極對數Pn4最大電流Imax/A18.0轉動慣量J/(kg·m2)0.915×10-3額定轉矩TN/(N·m)5相繞組電阻/Ω0.567最大轉矩Tmax/(N·m)15相繞組電感/mH2.316機械時間常數TM/ms2.24電氣時間常數/ms4.058

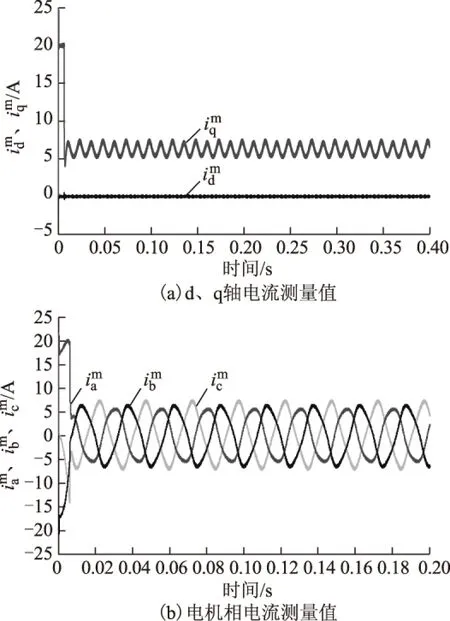
圖7 有測量誤差時d、q軸和三相電流測量值Fig.7 The measurement value of d,q axis,three-phase current with measurement error
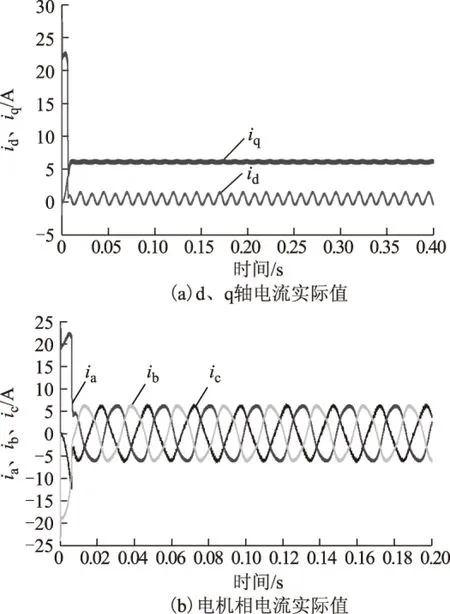
圖8 有測量誤差時d、q軸和三相電流實際值Fig.8 The real value of d,q axis,three-phase current with measurement error
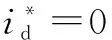
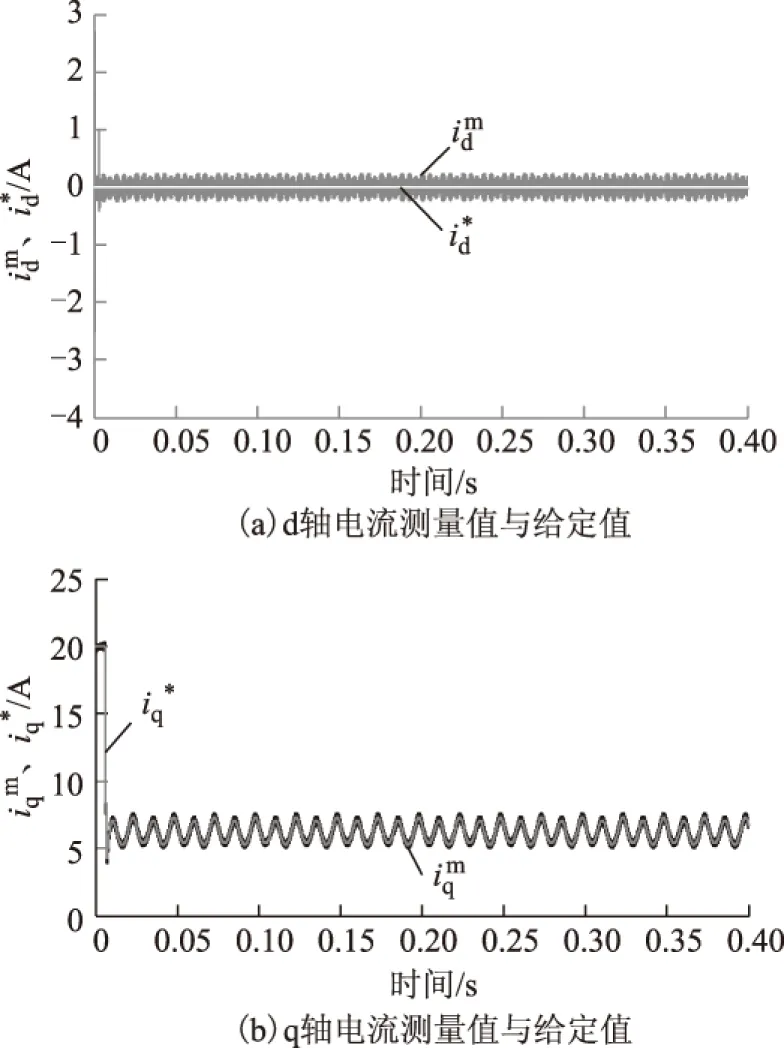
圖9 d、q軸電流給定與反饋Fig.9 The given d,q axis current and its feedback
為分析測量誤差對閉環系統性能的影響,對穩態時的電機轉速進行了FFT分析,仿真結果如圖10所示。由式(19)可以看出,電機轉速脈動量與Δid呈正比,由于測量誤差的影響,使Δid在fe、2fe處振蕩,則電機轉速也在fe、2fe處振蕩,所以圖10b所示的穩態時轉速FFT分析結果中含有1次和2次諧波,與理論分析一致。
圖10 電機轉速與FFT分析Fig.10 Motor speed and its FFT analysis
圖11為測量誤差仿真結果。隨著電機運行,測量誤差和增益誤差趨于一個穩定值,增益誤差Ka收斂于1.1,Kb收斂于0.9,偏移誤差ia_offset收斂于0.05,ib_offset收斂于0.02,與仿真條件設置一致,說明采用對d軸進行分段積分的測量誤差計算方法正確。
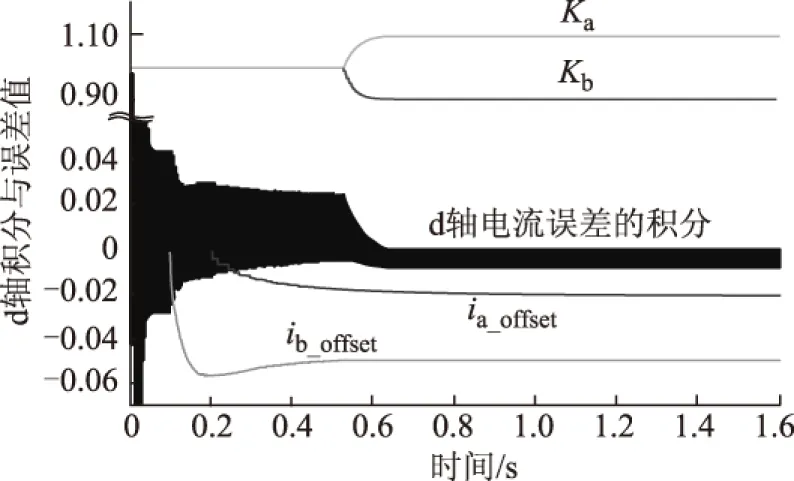
圖11 測量誤差仿真分析Fig.11 Simulation analysis of measurement error
3.2 實驗驗證
為進一步驗證本文提出的相電流測量誤差補償算法的有效性,搭建基于TMS320F2812DSP芯片的永磁同步電機控制系統,如圖12所示。
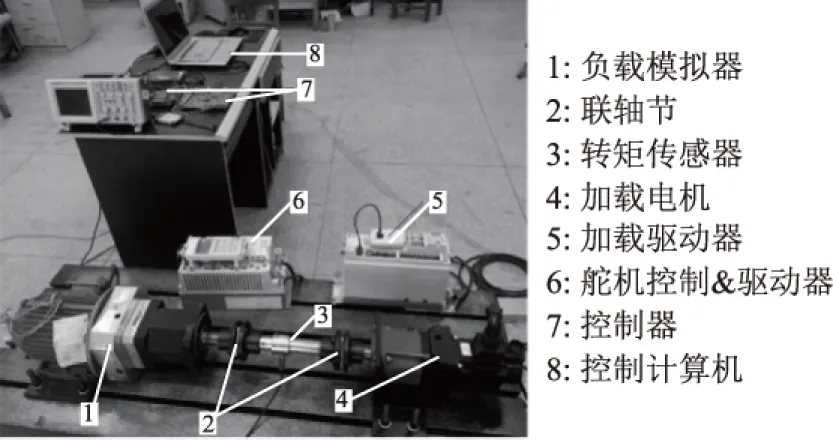
圖12 永磁同步電機控制系統Fig.12 The PMSM control system
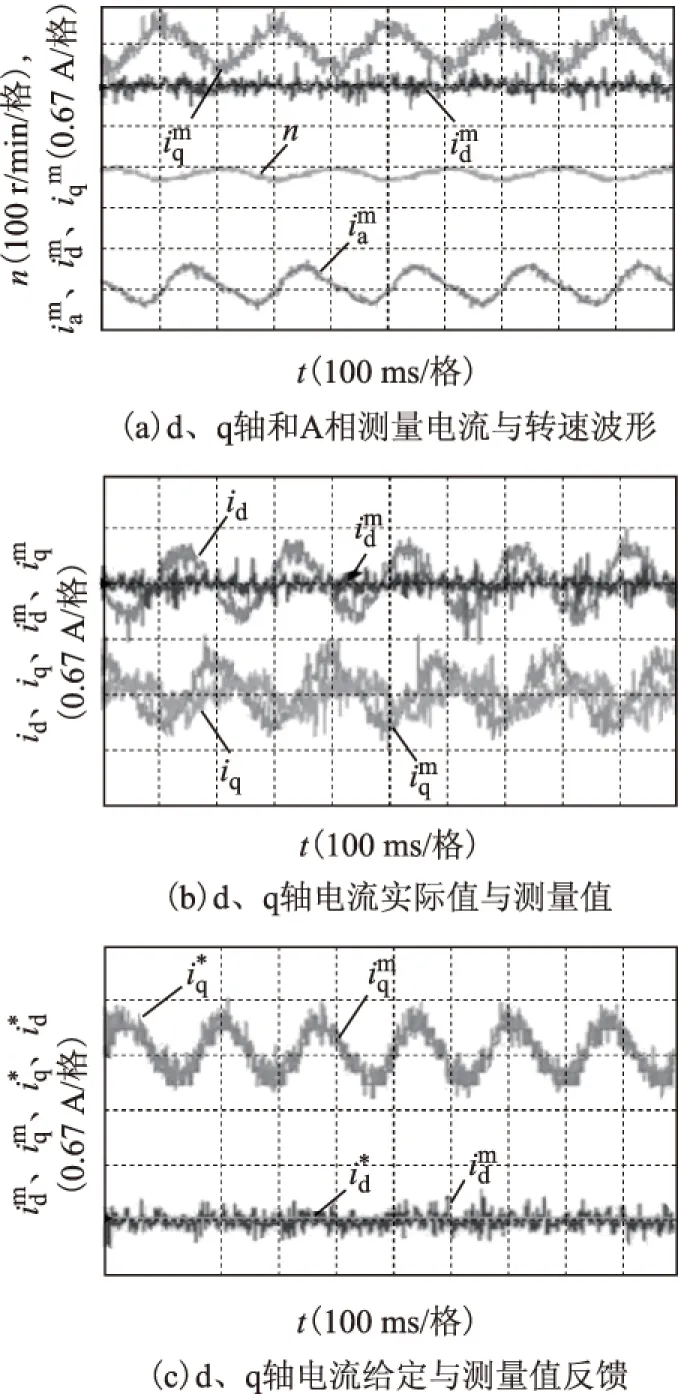
圖13 有測量誤差時電流波形Fig.13 The current waveform with measurement error
采用誤差補償策略之后,d、q軸和A相測量電流與轉速波形如圖14所示。由圖14可見,補償測量誤差之后,系統控制性能提高,穩態時轉速未見明顯脈動,d、q軸電流基本為恒值,A相電流較為正弦。說明了補償電流測量偏執的重要性,尤其是在輕載,電機電流較小時,即使較小的偏差也會給系統帶來一定不穩定。
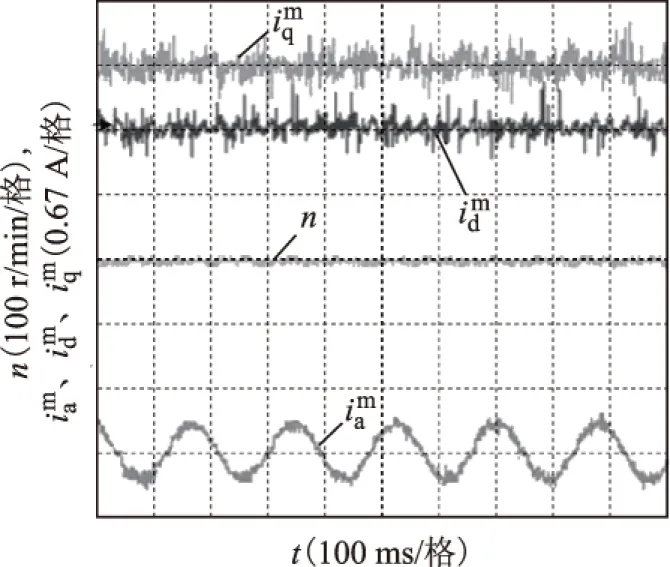
圖14 補償后轉速實驗波形Fig.14 The speed waveform after compensation
為分析誤差補償策略對電機動態性能的影響,得到誤差補償過程中電機轉速的實驗波形如圖15所示。由此可見,在誤差補償過程中,電機轉速脈動量逐漸減小,電機轉速趨于穩定值。
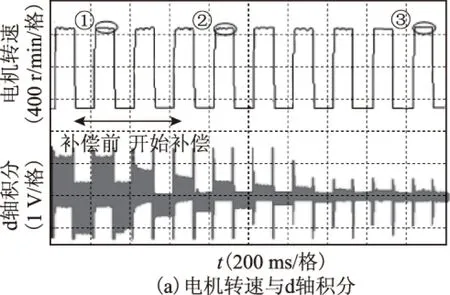
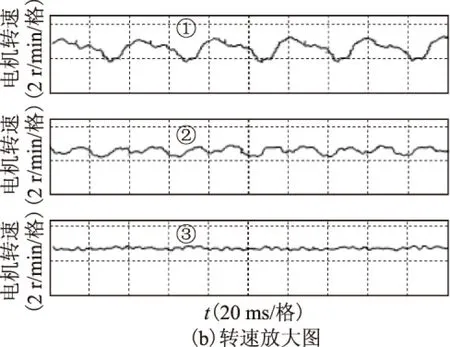
圖15 誤差動態補償過程Fig.15 Error dynamic compensation process
將本文提出的誤差補償策略應用于其他參數的PMSM控制系統,補償效果明顯,說明基于d軸電流分段積分的補償策略具有較好的魯棒性。
4 結論
本文對電機相電流檢測中的測量誤差進行了分析,研究了增益誤差和偏移誤差對閉環系統的影響,為減小測量誤差對電機控制的影響,提出了一種對d軸電流進行分段積分的補償策略,仿真和實驗結果表明了誤差補償策略的有效性,可以很好地減小測量誤差對系統的影響,從而減小轉矩和轉速的周期性脈動。
[1] 喬鳴忠,夏益輝,朱鵬,等.基于電流閉環和死區補償的變頻驅動調速系統低頻振蕩抑制[J].電工技術學報,2014,29(11):126-133. Qiao Mingzhong,Xia Yihui,Zhu Peng,et al.Low-frequency oscillation restrain method of induction motor fed by inverter based on current close-loop and dead-time compensation[J].Transactions of China Electrotechnical Society,2014,29(11):126-133.
[2] 郭希錚,游小杰,徐從謙,等.大功率電力牽引控制系統硬件在回路實時仿真[J].電工技術學報,2012,27(4):65-70. Guo Xizheng,You Xiaojie,Xu Congqian,et al.Simulation of hardware in loop for high-power electrical traction system[J].Transactions of China Electrotechnical Society,2012,27(4):65-70.
[3] 吳楠,李尚盛,查曉明.改進的同步電機阻尼繞組電流觀測器[J].電力系統保護與控制,2015,43(1):67-72. Wu Nan,Li Shangsheng,Zha Xiaoming.Improved Synchronous generator damper current observe[J].Power System Protection and Control,2015,43(1):67-72.
[4] Kang Y C,Zheng T Y,Kim Y H,et al.Development of a compensation algorithm for a measurement current transformer[J].IET Generation Transmission & Distribution,2011,5(5):531-539.
[5] Chung D W,Sul S K.Analysis and compensation of current measurement error in vector controlled AC motor drives[J].IEEE Transactions on Industry Applications,1998,34(2):340-345.
[6] Lam B H,Panda S K,Xu J X,et al.Torque ripple minimization in PM synchronous motor using iterative learning control[C]//The 25th Annual Conference of the IEEE Industrial Electronics Society,1999,3:1458-1463.
[7] Harke M C,Guerrero J M,Degner M W,et al.Current measurement gain tuning using high-frequency signal injection[J].IEEE Transactions on Industry Applications,2008,44(5):1578-1586.
[8] Samitha Ransara H K,Madawala U K.A torque ripple compensation technique for a low-cost brushless DC motor drive[J].IEEE Transactions on Industrial Electronics,2015,62(10):6171-6182.
[9] Sencer B,Shamoto E.Effective torque ripple compensation in feed drive systems based on the adaptive sliding-mode controller[J].IEEE Transactions on Mechatronics,2014,19(6):1764-1772.
[10]Harke M C,Lorenz R D.The spatial effect and compensation of current sensor gain deviation for three-phase three-wire systems[J].IEEE Transactions on Industry Applications,2008,44(4):1181-1189.
[11]賈學瑞,粟時平,劉桂英,等.并網逆變器死區效應消去補償方法研究[J].電力系統保護與控制,2016,44(5):30-35. Jia Xuerui,Su Shiping,Liu Guiying,et al.A novel strategy of dead-time elimination and compensation for grid-tied inverters[J].Power System Protection and Control,2016,44(5):30-35.
[12]Kim M,Sul S K,Lee J.Compensation of current measurement error for current-controlled PMSM drives[J].IEEE Transactions on Industry Applications,2012,50(5):3365-3373.
[13]湯浩.一種單相諧波電流實時綜合檢測算法[J].電氣技術,2015,16(3):52-56. Tang Hao.Integrated real-time single phase harmonic current detection algorithm[J].Electrical Engineering,2015,16(3):52-56.
[14]陳斌,王婷,呂征宇,等.電壓型逆變器非線性的分析及補償[J].電工技術學報,2014,29(6):24-30. Chen Bin,Wang Ting,Lü Zhengyu,et al.The analysis and compensation of voltage source inverter nonlinearity[J].Transactions of China Electrotechnical Society,2014,29(6):24-30.
[15]肖海峰,劉海龍,賀昱矅,等.基于電壓空間矢量控制 PMSM系統新型死區補償方法[J].電工技術學報,2013,28(8):114-119. Xiao Haifeng,Liu Hailong,He Yuyao,et al.Study of a dead-time compensation method for PMSM drive based on voltags space vector control[J].Transactions of China Electrotechnical Society,2013,28(8):114-119.
蔡志端 男,1978 年生,博士研究生,講師,研究方向為電機相電流檢測、電機控制、故障診斷與容錯控制。
E-mai:czddule@zjhu.edu.cn(通信作者)
王培良 男,1963年生,碩士,教授,研究方向智能控制、故障診斷。
E-mail:wpl@zjhu.edu.cn
Measurement Error Analysis and Its Compensation for Phase Current of Permanent Magnet Synchronous Motor
Cai Zhiduan1Wang Peiliang1Xun Qian1Jiang Yuanyuan2Xun Boyang3
(1.School of Engineering Huzhou University Huzhou 313000 China 2.College of Automation Engineering Nanjing University of Aeronautics and Astronautics Nanjing 211106 China 3.College of Mechanical and Electrical Engineering Inner Mongolia Agriculture University Huhhot 010018 China)
For permanent magnet synchronous motor,to reduce the measurement error of the phase current and meet the speed requirements of high performance,the measurement error analysis and its compensation for the phase current are completed in the paper.Firstly,the principle of the measurement errors is introduced,and the influence of the measurement errors on the performance of the closed-loop speed control system is analyzed.Then,a compensation strategy for the d-axis current in segmented integration is proposed.The d-axis current integration can get the error terms that is used for the compensation of the current measurement.Simulation and experimental results show that offset-errors and gain-errors will cause the oscillation of the torque and the speed with 1 time and 2 times angular frequencies.The compensation strategy can reduce the measurement errors greatly so as to reduce the periodic oscillation of the torque and the speed.
Measurement error,offset-error,gain-error,segmented integration,periodic oscillation
國家自然科學基金項目(61573137)、浙江省公益技術應用研究計劃項目(2016C31115)和湖州市公益性技術應用研究計劃項目(2015GZ05)資助。
2016-04-12改稿日期2016-08-19
TM315
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
