基于定子電流矯正的異步電機間接定子磁場定向控制
2017-01-03 03:05:50邵佳俊黃文新楊駒豐
電工技術學報 2016年23期
關鍵詞:磁場
邵佳俊 黃文新 楊駒豐 楊 璐
(南京航空航天大學自動化學院 南京 210016)
基于定子電流矯正的異步電機間接定子磁場定向控制
邵佳俊 黃文新 楊駒豐 楊 璐
(南京航空航天大學自動化學院 南京 210016)
提出一種基于定子電流誤差的間接定子磁場定向矯正控制方法。分析了定子dq軸電流以及定子磁鏈的關系,推算出q軸電流對定子磁場的去磁分量,在負載變化時加大d軸電流補償該分量,實現定子電流dq軸分量的分解。采用了磁鏈開環的矢量控制,避免了傳統磁場定向矢量控制在低速時磁場觀測的復雜性和不準確性。然而為保證磁場定向的準確性,提出了基于定子電流誤差的磁場定向矯正方法,通過分析磁場定向的超前和滯后時dq軸給定電流和反饋電流的關系,補償到q軸電流,進而改變轉差來彌補磁場定向不準帶來的誤差。最后,搭建了異步電機Matlab仿真模型和實驗平臺,結果表明,磁場定向在穩態運行和電機參數變化時有良好的矯正效果,保證控制系統的靜、動態性能。
間接定子磁場定向 去磁分量 定子電流誤差 磁場定向矯正
0 引言
籠型異步電機轉子堅固可靠、成本低、應用面廣。異步電機高性能變頻調速控制方式主要有矢量控制和直接轉矩控制。其中矢量控制方法具有調速范圍寬、響應迅速、穩定性更好的優點,在工業生產、車輛交通和航空航天等領域均有廣泛應用。目前異步電機的矢量控制大多采用以轉子磁場定向,理論上通過轉子磁鏈定向可以實現dq電流的完全解耦,從而獨立控制磁鏈和轉矩,使控制獲得高動靜態性能。然而要實現dq電流的完全解耦,需滿足磁場定向的準確性,必須對磁鏈進行精確地檢測[1]。目前研究人員已提出多種磁鏈檢測方法[2-7],其中電壓模型不受轉子參數的影響,但在低速時由于電機電阻上的壓降影響變大以及積分器的漂移等因素會使磁鏈觀測出現偏差,從而使系統的控制性能降低,還可能引起系統的低頻振蕩。電流模型在低速時有良好的效果,但依賴于轉子參數的準確性,因溫度、飽和等因素造成的轉子參數的變化會對轉子磁鏈估計產生較大誤差[8]。全階觀測器計算原理復雜,也不適合實際應用[9,10]。同時采用SVPWM調制方式計算參考電壓矢量時,通過dq電流計算dq控制電壓會引入勵磁電流和轉矩電流的交叉耦合項,也需要在電壓給定側進行解耦[11]。采用開環的磁場定向方式,可以避免磁鏈估算,簡化系統結構[12],但對電機參數的依賴性進一步加強,因而必須對電機參數進行實時辨識來確保定向的準確性[13]。
采用定子磁鏈定向方式的矢量控制,可以降低對轉子參數的依賴性[14]。但這種控制策略隨著轉矩的上升,q軸電流對磁鏈的去磁作用也隨之增大,沒有實現dq電流的完全解耦。為此,本文在文獻[13]的基礎上,通過改變d軸電流間接控制磁鏈恒定。根據負載的大小實時計算出q軸轉矩電流對磁場的去磁分量,從而給出d軸勵磁電流,保證定子磁鏈恒定。為了避免直接磁場定向中磁鏈計算的復雜性和不精確性,本文采用磁鏈開環的間接定向方式,沒有進行磁鏈計算,不會把磁鏈估算誤差引入到閉環控制中。但需保證磁鏈定向的準確性,因而提出基于定子q軸電流矯正的異步電機間接磁場定向控制。該方法通過比較定子電流的給定值與反饋值的誤差,反饋q軸定子電流的給定,通過改變轉差,實現磁鏈開環控制的定向矯正,保證系統的控制性能。最后利用Matlab搭建仿真模型并給出仿真結果,并運用一臺5.5 kW異步電機實驗樣機進行了實驗驗證。
1 異步電機定子磁場定向
異步電機通過坐標變換,在dq坐標系下的數學模型為
(1)

定子磁場定向控制是將定子磁場正向幅值定義為d軸方向,此時ψsd=ψs,ψsq=0,代入式(1)的第3行,在穩態情況下可得
(2)
式(2)表明,定子磁鏈ψs不僅由isd單獨產生,當負載轉矩T≠0時,isq會削弱定子磁鏈。因此q軸電流對定子磁鏈存在一定去磁效應[14],這就是定子磁場定向和轉子磁場定向的不同之處。

(3)
將轉差表達式(3)帶入磁鏈表達式(2),得到isd的表達式
(4)
式中,ψs為實際定子磁鏈。
為了保持磁鏈恒定,根據式(4)等號右邊第二項即可定量得到isd補償isq對定子磁鏈去磁效應的數值,實現定子dq電流的基本解耦。由于式(4)存在電機參數Ls和σ,因而這種解耦控制方法的性能受到電機參數的影響。
根據式(4)可得到定子dq電流矢量關系如圖1所示。在電機運行過程中,當isq變化時,只需保證isd滿足式(4),即可保證定子磁鏈的基本恒定,實現定子磁場定向控制。

圖1 定子dq電流矢量關系Fig.1 The dq stator current vector diagram
2 基于定子電流誤差的磁場矯正
上文提出的控制方法都是基于定子磁鏈準確定向的情況下得到的,而定向的準確性將會直接影響電機的控制性能。由于該方法采用的是磁鏈開環控制方式,而磁鏈定向的準確性將會隨電機參數變化而變化,因此必須對定子磁鏈定向角θ作矯正,保證定子磁場定向的準確性,提高系統控制的性能。因而本文提出基于定子電流誤差的磁場矯正方法。
根據上文的分析可知:ωs和isd可根據isq計算得到,因此只需控制isq即可控制系統性能。這種控制方式簡化了控制過程,但電機參數的變化會影響定向的準確性,使控制性能降低。為此,需要分析在定向不準情況下的電流矢量。圖2為定向角處于超前或滯后狀態下的電流矢量。

圖2 不同定子磁場定向情況下的電流矢量Fig.2 The current vector diagram of different stator flux orientation
從圖2中可以看出,當磁場定向角超前真實磁鏈θ1時,有
(5)
定子d軸電流的isd大于實際量,電機處于過勵磁狀態,導致電機端電壓、電流上升,電機發熱增加。而定子q軸電流isq小于給定量,電機的輸出轉矩和功率下降,電機效率下降[15]。
相反,當磁場定向角滯后真實磁鏈θ2時,有
(6)
此時定子d軸電流的isd小于實際量,電機處于欠勵磁狀態,使電機反電動勢變小,輸入電流過大,而isd小于給定量在帶同樣的負載時,轉矩分量增加很快,帶載能力降低,輸出轉矩、功率相應降低,電機效率下降[15]。
綜合以上兩者分析,當電機參數變化引起磁鏈定向角偏離真實值時,都會使電機功率和效率降低,為此必須對磁場定向角進行矯正以保證定子磁場定向的準確性。
由以上分析可知,當定向角處于超前和滯后狀態下,定子dq軸電流與正常情況下有所不同,且根據坐標變換后定子dq軸電流易于獲得和測量,為此可以通過比較定子電流來判斷定子磁場定向的準確性,調節系統的基本控制量isq,從而調節定子磁場的定向角,保證定子磁場定向的準確性。因此本文提出一種基于定子q軸電流誤差的磁場定向矯正方法。
當定子磁鏈偏離真實磁鏈Δθ時,通過對q軸電流的調節使偏離角Δθ的穩態值趨于0。
以定向角超前Δθ為例,給出此時的電流矢量如圖3所示。

圖3 定向超前的定子電流矢量Fig.3 The stator current vector diagram of directional ahead
根據圖3計算tanΔθ=tan(θ*-θ),定向誤差角Δθ為
(7)
令
(8)
當定子磁場定向準確時,有R=0,即tanΔθ=0。
當電機參數變化以及系統受外界擾動(如電機電阻和電感變化)時,假設轉子電阻阻值變大。根據式(3)可知,如果仍用原來的Rr會使計算得到的轉差比實際值偏小。定向角為
θ=∫(ωr+ωs)dt
(9)
因此磁場定向角會滯后實際值,使真實q軸電流偏小,則R<0。為了讓式(3)算出的轉差和實際轉差相等,需要加大isq的給定值,因此q軸電流給定的調節量為ifk>0。則
(10)
因此,轉子電阻變大時,R<0,調節量ifk>0。轉子電阻變小時,R>0,調節量ifk<0。所以可將0與R的比值經過PI調節器調節,輸出量即為ifk,只要定向角超前真實磁鏈,經式(8)算得R>0成立,經過PI調節器調節后輸出量ifk繼續增加,從而使計算得到的轉差和實際轉差相等,磁鏈定向角等于真實磁鏈,即定向偏離角Δθ=0°。同理當定向超前時,使ifk<0,最終使Δθ=0°。從而在電機參數變換時,其磁鏈定向角始終保持在真實位置。
綜合以上分析給出基于定子q軸電流的矯正異步電機間接定子磁場定向控制如圖4所示。主要的控制部分包括dq軸勵磁電流給定的計算、轉差頻率的計算、坐標變換和SVPWM調制。

圖4 異步電機低速間接定子磁場定向控制框圖Fig.4 The block diagram of indirect stator flux oriented control for induction motor at low speed
3 控制系統實現方案
為了對所提出的控制策略在異步電機低速運行時的性能進行驗證,分別在Matlab/Simulink中進行仿真驗證以及在實驗平臺上進行實驗驗證。電機參數見表1。
表1 異步電機參數
Tab.1 The parameters of induction motor

參數數值參數數值額定功率/kW5.5定子電阻/Ω0.964額定電壓/V380轉子電阻/Ω0.964額定電流/A11.2定、轉子漏感/mH0.00831額定頻率/Hz50互感/mH0.198電機相數3極對數2
3.1 仿真驗證


圖5 系統仿真波形Fig.5 System simulation waveform
圖6為電阻突變時采用定向角矯正間接定子磁場定向控制和傳統直接定子磁場定向控制誤差角對比。由圖可看出,采用定向角矯正間接定子磁場定向控制在轉子電阻變化時,通過引入反饋量ifk,使得定向角(磁鏈真實值-定向值)基本消除,而采用傳統的定子磁場定向控制,其在電阻變化時定向有偏差,且無法消除。

圖6 電阻變化后定向角誤差對比Fig.6 Orientation angle error when the resistance change

圖7 傳統定子磁場定向控制定向角誤差Fig.7 Orientation angle error of traditional stator field-oriented control when the motor parameters change

圖8 電機參數變化時基于定子電流誤差矯正的定向角誤差Fig.8 Orientation angle error of stator current correction when the motor parameters change
為進一步說明該方法的普遍適用性,圖7為其他電機參數變化時,采用傳統定子磁場控制方式的定向角度偏差擬合曲線。圖8為其他電機參數變化時,采用基于定子電流矯正控制方式的定向角度偏差擬合曲線。對比圖7和圖8可知:采用基于定子電流矯正控制方式的定向角誤差較小。實際過程中由于定子dq軸電流必在一定范圍內振蕩,因而反饋電流ifk也在一定范圍內振蕩,因此這種方法無法完全消除定向角誤差,但這種基于定子電流誤差矯正的方法對定向角誤差有很好的改進。
3.2 實驗驗證
在實驗平臺上對提出的控制策略進行實驗驗證。實驗平臺由三相異步電機、轉速轉矩傳感器、三相逆變器及其控制系統組成,負載是一臺由逆變器控制的同步電機。控制系統采用Freescale的56F8346的DSP。實驗平臺如圖9所示。

圖9 實驗平臺Fig.9 Experimental platform

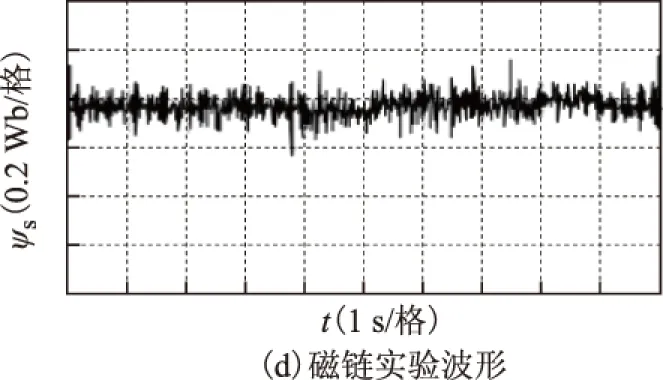
圖10 突加減負載解耦控制實驗波形Fig.10 The experimental waveforms when loading and unloading
圖10為定子磁場解耦控制時,突加減負載時A相電流、電磁轉矩、轉速和磁鏈特性曲線。空載起動,轉速為60 r/min,在4 s時突加25 N·m的負載,8 s時突減負載至0。在4 s和8 s瞬間,定子電流和輸出轉矩迅速相應負載變化,維持電機轉速恒定。電機轉速在突加和突減負載瞬間有變化,隨即恢復穩定值,響應較快。定子磁鏈在整個過程中基本保持恒定。穩態時,電磁轉矩、轉速和磁鏈脈動較小,說明這種解耦控制方式具有較好的動態性能。
圖11為采用基于定子電流矯正間接定子磁場定向矢量控制系統和傳統定子磁場定向控制系統異步電機在低速時轉子電阻突變時相關實驗波形。轉速為60 r/min,負載轉矩為12 N·m。


圖11 轉子電阻突變為2倍時系統的實驗波形Fig.11 The experimental waveforms when rotor resistance mutation is 2 times
圖11a、圖11b為定子q軸電流和磁鏈對比實驗波形。在2 s時,轉子電阻突變為2倍時,采用傳統定子磁場定向控制方法,由于此時磁場定向角滯后真實磁場,其定子q軸電流偏大,為了維持系統穩定,其定子q軸電流會減小,定子磁場增大,輸出轉矩維持15 N·m,此時電機處于過勵磁狀態,三相電流幅值略微增加,電機效率降低。采用基于定子電流矯正間接定子磁場定向矢量控制系統,其通過定子電流矯正并經過PI調節后,引入反饋量ifk,使得定向角誤差基本消除,因而實際電流和給定電流誤差為零,使dq軸電流基本不變,定子磁鏈也不會改變。圖11c為轉速對比波形,采用傳統方法在電阻突變時其轉速穩態誤差加大,而采用本文提出的方法其轉速基本沒有變化。圖11d為電磁轉矩對比波形,采用本文提出的方法在電機轉子電阻突變后,電磁轉矩脈動小于傳統方法。該實驗證明基于定子電流的矯正方法有較好的效果。
4 結論
本文針對間接定子磁鏈定向控制中定子dq電流不解耦的問題,提出一種保持定子磁鏈恒定的矢量控制方案。由于采用磁鏈開環的控制方式,在磁場定向過程中易受電機參數變化和環境的影響,提出了基于定子電流矯正的定子磁場定向控制,通過定子dq電流誤差閉環進行磁場定向矯正。由于在矯正過程中僅使用定子電流值且沒有引入其他任何電機參數,因而這種矯正方法簡單、可靠且易實現。仿真和實驗結果表明,在電機參數發生變化時,通過磁場矯正使定向角趨近真實值,保持磁鏈恒定。因此該控制方法具有良好的動靜態性能。
[1] 周揚忠,毛潔.基于有效磁鏈概念的永磁同步電動機新型定子磁鏈滑模觀測器[J].中國電機工程學報,2013,33(12):152-158. Zhou Yangzhong,Mao Jie.A novel sliding mode stator flux linkage estimator based on active flux principle for permanent magnet synchronous motors[J].Proceedings of the CSEE,2013,33(12):152-158.
[2] Bose B K.Modern power electronics and AC drives[M].New Jersey,USA:Prentice-Hall,2002:363-368.
[3] 馮曉剛,陳伯時,夏承光.感應電動機轉子磁鏈的間接觀測方法[J].電工技術學報,1997,12(1):15-18. Feng Xiaogang,Chen Boshi,Xia Chengguang.Flux observers for induction motors-A survey[J].Transactions of China Electrotechnical Society,1997,12(1):15-18.
[4] Hu J,Wu B.New integration algorithms for estimating motor flux over a wide speed range[J].IEEE Transactions on Power Electronics,1998,13(5):969-977.
[5] 何志明,廖勇,向大為.定子磁鏈觀測器低通濾波器的改進[J].中國電機工程學報,2008,28(18):61-65. He Zhiming,Liao Yong,Xiang Dawei.Improvement of low-pass filter algorithm for stator flux estimator[J].Proceedings of the CSEE,2008,28(18):61-65.
[6] 陳增祿,馬鑫,姬弘揚,等.定子磁鏈電壓模型的偏移計算和反饋補償新方法[J].中國電機工程學報,2014,34(18):3035-3041. Chen Zenglu,Ma Xin,Ji Hongyang,et al.A novel drift-estimated and feedback-corrective algorithm for voltage model of stator flux[J].Proceedings of the CSEE,2014,34(18):3035-3041.
[7] Comanescu M,Xu Longya.An improved flux observer based on PLL frequency estimator for sensor less vector control of induction motors[J].IEEE Transactions on Industrial Electronics,2006,53(1):50-56.
[8] Mastorocostas C,Kioskeridis I,Margaris N.Thermal and slip effects on rotor time constant vector controlled induction motor drives[J].IEEE Transactions on Power Electronics,2006,21(2):495-504.
[9] Alonge F,D’lppolito F,Giardina G.Design and low-cost implementation of an optimally robust reduced-order rotor flux observer for induction motor control[J].IEEE Transactions on Industrial Electronics,2007,54(6):3205-3216.
[10]Vicente I,Endemano A,Garin X.Adaptive full order observer based stable speed sensor less scheme for vector controlled induction motor drives[C]//13th European Conference on Power Electronics and Applications,Barcelona,Spain,2009:1-10.
[11]周志剛.異步電動機轉子磁場定向偏差解耦控制系統的研究[J].電工技術學報,2003,18(3):19-23. Zhou Zhigang.Study on system of rotor field-oriented deviation decouple control for asynchronous motor[J].Transactions of China Electrotechnical Society,2003,18(3):19-23.
[12]Masiala M.Self-tuned indirect field oriented controlled IM drive[D].Canada:University of Alberta,2010.
[13]Krishnan R,Bharadwaj A S.A review of parameter sensitivity and adaptation in indirect vector controlled induction motor drive systems[J].IEEE Transactions on Power Electronics,1991,6(4):695-703.
[14]阮毅,張曉華,徐靜,等.感應電動機按定子磁場定向控制[J].電工技術學報,2003,18(2):1-4. Ruan Yi,Zhang Xiaohua,Xu Jin,et al.Stator flux oriented control of induction motors[J].Transactions of China Electrotechnical Society,2003,18(2):1-4.
[15]陸海峰,瞿文龍,張磊,等.一種基于無功功率的異步電機矢量控制轉子磁場準確定向方法[J].中國電機工程學報,2005,25(16):116-120. Lu Haifeng,Qu Wenlong,Zhang Lei,et al.A novel rotor flux oriented scheme of induction motor based on reactive power[J].Proceedings of the CSEE,2005,25(16):116-120.
Indirect Stator Field-Oriented Control for Induction Motor Based on the Stator Current Correction
Shao Jiajun Huang Wenxin Yang Jufeng Yang Lu
(College of Automation Engineering Nanjing University of Aeronautics and Astronautics Nanjing 210016 China)
In this paper,a new method of indirect stator field-oriented control for induction motor based on the stator current correction is proposed.The dq axis stator current and the stator flux linkage are analyzed.The relationship between q axis current and demagnetization component of stator flux linkage is calculated,and the decomposition of dq axis stator current is achieved.Using the indirect field-oriented vector control,the complexity and inaccuracy of the flux linkage observation in traditional field-oriented vector control at low speed are avoided.In order to guarantee the accuracy of the flux linkage orientation,the flux linkage orientation based on the correction of stator current error is proposed in this paper.Through the analysis of flux linkage,the dq axis dvanced current and delayed current,compensates to q axis current,and changes the slip to compensate to the error of the flux linkage orientation.Finally,the asynchronous motor of Matlab simulation model and experimental platform is established.And the results show that the system has great correction effects on the steady state operation and the variation of the motor parameters to ensure accurate static and dynamic performance.
Indirect stator field-oriented,demagnetization component,stator current error,field orientation correction
2015-07-01 改稿日期2015-08-27
TM343
邵佳俊 男,1991年生,碩士研究生,研究方向為電機及其控制。
E-mail:jsnthmsjj@sina.com(通信作者)
黃文新 男,1966年生,教授,博士生導師,研究方向為電機及其控制、新型風力發電技術、電能變換。
E-mail:Huangwx@nuaa.edu.cu
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23
