固體火箭發動機火箭橇過載模擬試驗方法①
2017-01-05 09:34:26張翔宇甘曉松周艷青
固體火箭技術 2016年6期
張翔宇,甘曉松,高 波,馬 亮,周艷青
(1.中國航天科技集團公司四院四十一所,西安 710025;2.中國航天科技集團公司第四研究院,西安 710025)
固體火箭發動機火箭橇過載模擬試驗方法①
張翔宇1,甘曉松1,高 波2,馬 亮1,周艷青1
(1.中國航天科技集團公司四院四十一所,西安 710025;2.中國航天科技集團公司第四研究院,西安 710025)
以火箭橇作為過載加載平臺和回收載體,通過結構強度及振動模態仿真確定火箭橇系統結構,設計推力控制方案滿足試驗彈道要求,建立了固體發動機火箭橇地面過載模擬試驗方法。在國內首次開展了全尺寸固體發動機火箭橇試驗,橇體大于16g的航向過載持續時間約為2.258 s,滿足設計要求,試驗全程監測并采集到發動機壓強及振動數據。被試發動機在過載條件下出現了與飛行試驗相似的壓強振蕩特性,復現了導彈飛行過載誘發的固體發動機不穩定燃燒現象。
固體火箭發動機;火箭橇;過載;不穩定燃燒
0 引言
高機動性、高精度攔截是新一代防空反導導彈的主要特征之一[1],彈用固體發動機在工作過程中需承受大過載飛行工況,對發動機環境適應性提出了極高的要求。導彈飛行過載造成固體發動機絕熱結構燒蝕加劇[2]及不穩定燃燒問題的出現,成為制約國內新型固體發動機發展的技術瓶頸之一。
為確保飛行試驗成功,固體發動機參試前需進行充分的地面過載環境適應性研究。由于目前國內全尺寸發動機地面過載試驗手段存在空白,僅通過縮比發動機離心試驗[3-4]及“彎管”試驗[5-6]等模擬試驗方法進行絕熱層燒蝕規律研究,導致尺寸效應不清晰,考核不全面,飛行過載問題不能全部暴露,全尺寸發動機參試風險激增。
本研究首次采用火箭橇[7-8]作為試驗載體,開展了一種地面模擬導彈飛行過載的試驗方法,對某防空反導導彈固體發動機進行了國內首次全尺寸發動機火箭橇過載模擬試驗,獲得了發動機壓強、振動及過載等數據,并成功復現了導彈飛行過載引起的發動機不穩定燃燒現象。
1 試驗原理
利用火箭橇作為過載加載平臺和回收載體,以火箭橇自身攜帶的助推發動機及被試發動機為動力,通過火箭橇系統在滑軌上高速運動,模擬導彈飛行運動環境,完成被試發動機地面動態點火、高加速度運動及數據采集的整個工作過程。被試發動機采取一定的俯仰角度放置,將航向加速度分解為發動機坐標系下的軸向及橫向過載,研究過載環境下的發動機工作特性。
在火箭橇系統工作過程中,通過地面雷達、斷靶裝置測量橇體速度,進而獲得加速度,通過橇載黑匣子(包括相應的測試儀器和設備)實時采集,并保存壓強及振動數據(圖1)。試驗后,對被試發動機和測試系統進行無損回收。

圖1 火箭橇系統工作原理圖Fig.1 Diagram of working principle of rocket sled system
2 試驗方法
固體發動機火箭橇試驗需要在有限的工作時間及距離內,完成過載條件下發動機主要參數的測試。因此,火箭橇結構可靠性分析、振動環境分析、過載量級模擬以及數據采集方法的確定至關重要。
2.1 總體方案設計
本試驗系統主要由火箭橇系統和測試系統組成。火箭橇系統包括被試發動機(編號T2)、火箭橇體、助推發動機和水剎車裝置。測試系統包括橇載測試儀器、地面測試設備。
為了復現同型號發動機(編號T1)飛行試驗過載施加時刻出現的不穩定燃燒現象,T2發動機靜止點火,在工作至T1發動機壓強振蕩出現時刻,火箭橇解鎖,同時2枚Ⅰ型助推發動機點火,火箭橇按設計加速度運行,在速度降低時,2枚Ⅱ型助推發動機動態點火維持加速度,橇體按設計狀態運行全程,并進行剎車減速,無損回收。
2.2 火箭橇系統結構設計
2.2.1 火箭橇總體結構設計
本次試驗使用雙軌單橇結構形式,橇體全長約3.0 m,質量約為700 kg。橇體中間斜置角度10.6°,裝載T2發動機,按發動機坐標系將航向過載分解為發動機軸向及橫向過載。火箭橇兩側分別裝載2枚Ⅰ型和2枚Ⅱ型助推發動機,在橇體頭部進行整流設計,底部設計有水剎車裝置。
2.2.2 結構剛度及強度數值仿真分析
在ANSYS仿真平臺上建立1∶1的實體模型,并對橇體結構進行局部簡化。分析共進行了5個工況:第一狀態為Ⅰ型助推發動機點火;第二狀態為Ⅱ型助推發動機動態點火;第三狀態為最大速度;第四狀態為最大加速度;第五狀態為最大剎車過載時刻。T2發動機最大應力出現在第三狀態,橇體最大應力出現在第五狀態,其結果分別如圖2和圖3所示。5種狀態的分析結果詳見表1。
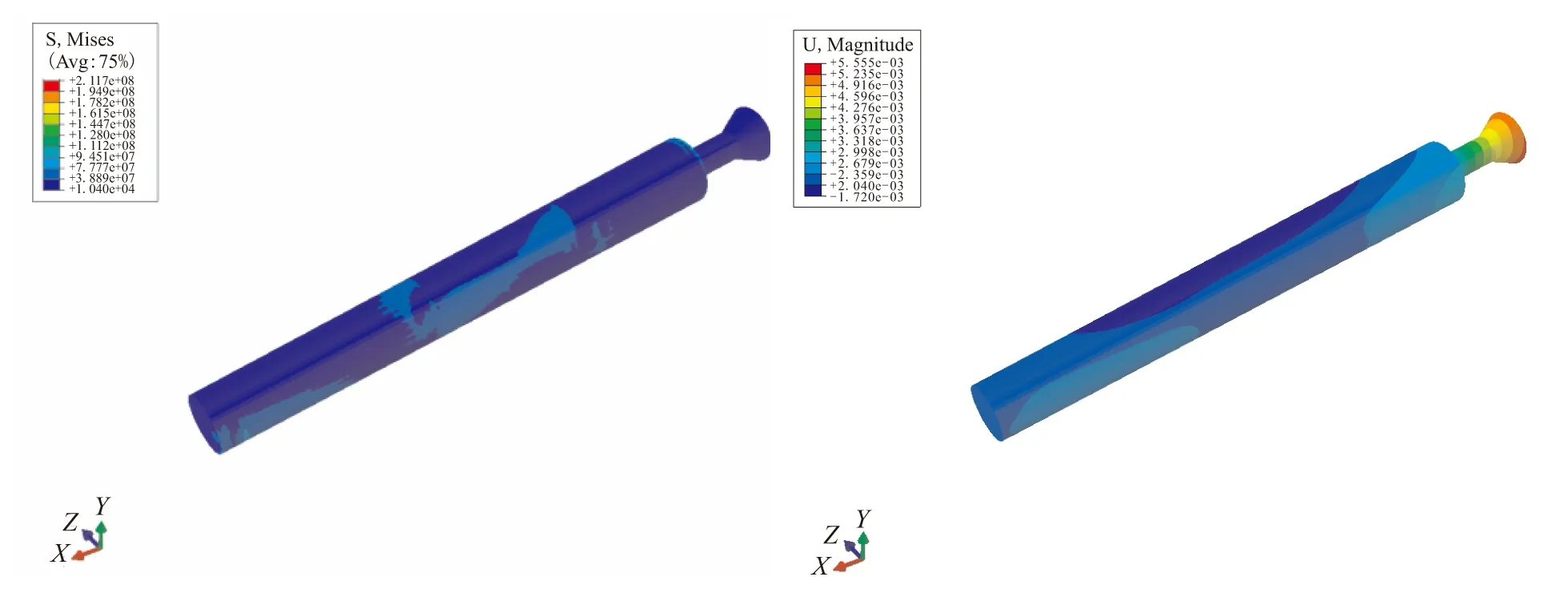
圖2 T2發動機應力圖及變形圖(第三狀態)Fig.2 Stress and strain of T2 motor(the 3rd state)
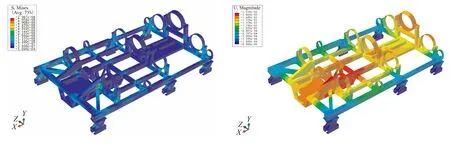
圖3 火箭橇體應力圖及變形圖(第五狀態)Fig.3 Stress and strain of rocket sled(the 5th state)表1 剛度和強度分析結果Table 1 Analysis results of stiffness and strength
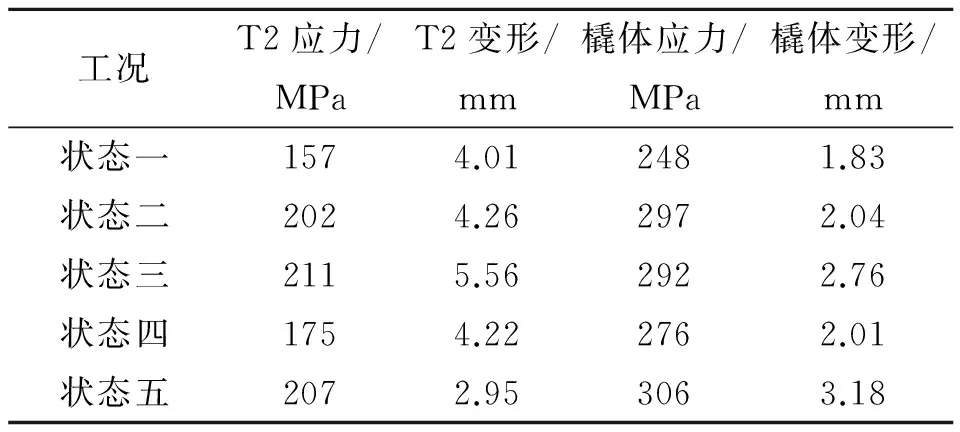
工況T2應力/MPaT2變形/mm橇體應力/MPa橇體變形/mm狀態一1574.012481.83狀態二2024.262972.04狀態三2115.562922.76狀態四1754.222762.01狀態五2072.953063.18
通過分析可知,T2發動機最大應力水平在211 MPa以下,低于材料屈服極限700 MPa,發生在尾部區域;橇體最大應力水平在306 MPa以下,低于材料屈服強度345 MPa,發生在底盤橫梁、縱梁接觸區域。橇體及T2發動機的整體應力水平都低于材料的屈服強度,且變形量較小,能夠滿足試驗需求。
2.2.3 振動模態數值仿真分析
對火箭橇系統進行全質量帶約束振動模態及振型數值仿真。分析結果表明,能量集中的前6階振動模態頻率為41.4~78.1 Hz(圖4),與T2發動機模態及聲腔一階頻率差異較大,不會產生模態耦合現象;火箭橇運行過程不存在勻速段,橇與軌之間是一個變頻過程,不存在激振的可能。因此,火箭橇系統的振動模態特性滿足試驗要求。
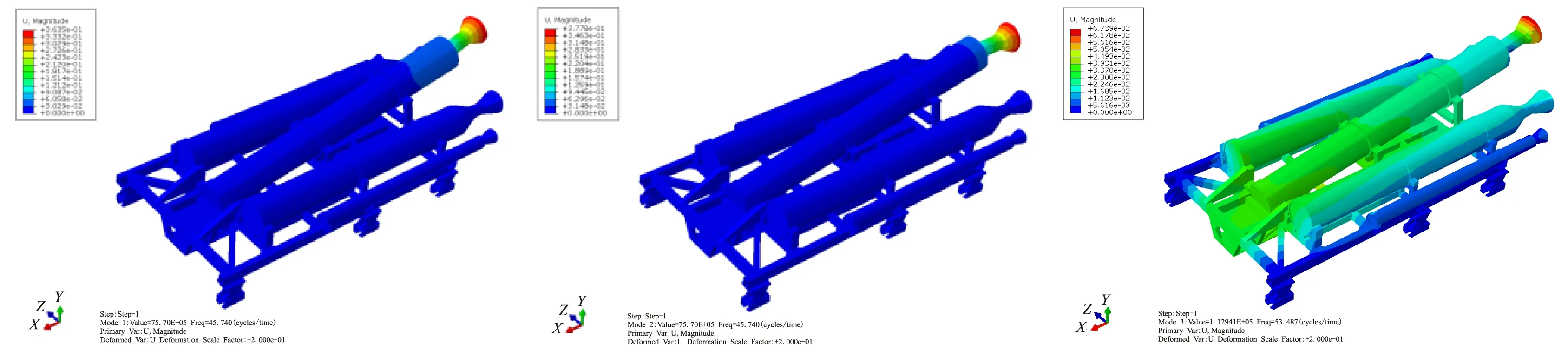
(a)第1階頻率41.4 Hz (b)第2階頻率43.8 Hz (c)第3階頻率53.5 Hz
(d)第4階頻率68.9 Hz (e)第5階頻率71.5 Hz (f)第6階頻率78.1 Hz圖4 火箭橇系統前6階振動模態仿真結果Fig.4 The first six modes by the vibration simulation of the rocket sled
2.3 試驗彈道設計
火箭橇試驗的核心是運行速度,即試驗彈道設計。影響試驗彈道的主要因素有空氣阻力、摩擦阻力、推力變化和質量變化。空氣阻力計算參考相似試驗實測數據,繪制火箭橇各部件阻力系數曲線,并結合數值仿真獲得;摩擦阻力采用滑動摩擦公式計算;推力及質量變化由發動機產品特性確定。計算結果表明,火箭橇全程航向過載≥16g的持續時間為2.126 s(圖5和表2),滿足T2發動機超過2 s的15g軸向過載及2.5g橫向過載的設計要求。
圖5 火箭橇試驗全程過載曲線Fig.5 Acceleration of the test motor
2.4 測試方案設計
速度測試采用斷靶測速和雷達測速相結合的方式,對Ⅱ型發動機動態點火、最大速度點及水剎車進入點進行斷靶測速系統測量,以便對雷達測速結果進行修正。
光學記錄利用高速攝像、高速運動分析儀監測T2發動機在軌運行狀況。
對橇體平臺及T2發動機進行振動環境測試。其中,T2發動機前裙、筒段及后裙分別布設一個測點,每測點監測3路振動數據(軸向、徑向、環向)。
對T2發動機工作全程進行壓強監測,低頻采樣1路,高頻采樣2路(采樣頻率≥5 k)。
3 試驗結果及分析
T2發動機火箭橇試驗按設計狀態運行全程(圖6),成功測得發動機壓強、振動及過載數據,航向過載超過16g,時間約為2.258 s,與設計狀態基本吻合(圖7),達到了預期效果。
表2 火箭橇試驗彈道設計Table 2 Test trajectory of the rocket sled acceleration experiment

(a)T2發動機靜止點火

(b)火箭橇解鎖運行圖6 試驗過程照片Fig.6 Photos of the firing test
對T2發動機壓強數據進行分析,并與T1發動機進行對比(圖8),在過載施加后,T2發動機出現了與T1發動機相同的觸發式非線性不穩定燃燒現象,燃燒室壓強躍遷,并持續振蕩。對比T1及T2發動機過載及壓強特性可知,二者的壓強振蕩都出現在過載施加時刻之后,說明導彈飛行過載可誘發發動機的不穩定燃燒現象。
圖7 火箭橇航向加速度-時間曲線Fig.7 Heading acceleration-time curve of the test
圖8 T1與T2發動機壓強振蕩情況對比Fig.8 Pressure oscillation results of the T1 and T2 motor
4 結論
(1)以火箭橇作為過載加載平臺和回收載體,通過振動模態及結構剛、強度仿真,確定火箭橇系統結構,通過試驗彈道設計,獲得推力控制方案,建立了固體發動機火箭橇地面過載模擬試驗方法。
(2)國內首次開展了全尺寸固體發動機火箭橇試驗,T2發動機過載條件滿足設計要求,成功監測并采集到全部試驗數據。
(3)T2發動機在過載條件下,出現了與飛行試驗相似的壓強振蕩特性,復現了導彈飛行過載誘發的固體發動機不穩定燃燒現象。
[1] 袁華,簡金蕾,任宏濱.第四代防空導彈關鍵技術初探[J].現代防御技術,2007,15(1):5-9.
[2] 何國強,王國輝,蔡體敏,等.高過載條件下固體發動機內流場及絕熱層沖蝕研究[J].固體火箭技術,2001,24(4):4-8.
[3] 李翔.發動機過載試驗技術研究[J].航空兵器,2008(1):34-37.
[4] 邢志浩,劉燕賓,王虎干,等.過載條件下固體火箭發動機內流場及絕熱層燒蝕研究[J].航空兵器,2013(4):37-40.
[5] 李江,何國強,秦飛,等.高過載條件下絕熱層燒蝕實驗方法研究(Ⅰ)方案論證及數值模擬[J].推進技術,2003(4):315-318.
[6] 李江,何國強,陳劍,等.高過載條件下絕熱層燒蝕實驗方法研究(Ⅱ)收縮管聚集法[J].推進技術,2004(3):196-198.
[7] 王云.火箭橇試驗滑軌的發展與展望[J].航空科學技術,2010(1):30-32.
[8] 楊興邦.火箭橇試驗滑軌[J].航空精密制造技術,1992(4):35-37.
(編輯:崔賢彬)
Rocket sled acceleration experiment method of SRM
ZHANG Xiang-yu1, GAN Xiao-song1,GAO Bo2,MA Liang1, ZHOU Yan-qing1
(1.The 41st Institude,The Fourth Academy of CASC,Xi'an 710025,China;2.The Fourth Academy of CASC,Xi'an 710025)
An acceleration experiment method was established for full-scale solid rocket motor by using rocket sled as overload and recycling platform.The structure of rocket sled system was determined by the strength and vibration numerical simulation.The test trajectory was designed by controlling the thrust of the boost motor.A successful acceleration test of SRM was carried on by rocket sled system for the first time in China.The pressure and the vibration data were recorded and the heading acceleration of the test motor was more than 16gwith duration of 2.258 s.The pressure oscillation characteristic of the test motor was similar to the earlier flight test motor.It is concluded that the acceleration of the missile could induce the combustion instability of the solid rocket motor.
solid rocket motor;rocket sled;acceleration;combustion instability
2015-05-18;
2015-06-16。
張翔宇(1984—),男,博士,研究方向為固體火箭發動機總體設計。E-mail:zhangxysci@126.com
V435
A
1006-2793(2016)06-0751-04
10.7673/j.issn.1006-2793.2016.06.003
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
數學物理學報(2017年6期)2018-01-22 02:26:40
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
汽車與新動力(2015年1期)2015-02-27 12:11:01
計算物理(2014年2期)2014-03-11 17:01:44
計算物理(2014年2期)2014-03-11 17:01:39
汽車與新動力(2013年5期)2013-03-11 16:08:17
