基于CAN總線的PFN測控系統設計與實現
2017-01-07 01:29:08張佳宇張曉林王大正劉福才
兵器裝備工程學報 2016年12期
秦 利,張佳宇,張曉林,王大正,劉福才
(1.燕山大學 西校區工業計算機控制工程河北省重點實驗室,河北 秦皇島 066004;2.燕山大學 西校區電力電子節能與傳動控制河北省重點實驗室,河北 秦皇島 066004)
【裝備理論與裝備技術】
基于CAN總線的PFN測控系統設計與實現
秦 利1,2,張佳宇1,張曉林1,王大正1,劉福才1
(1.燕山大學 西校區工業計算機控制工程河北省重點實驗室,河北 秦皇島 066004;2.燕山大學 西校區電力電子節能與傳動控制河北省重點實驗室,河北 秦皇島 066004)
為了將脈沖成形網絡(Pulse Forming Network,PFN)進行模塊化集成,更靈活地實現電磁發射系統的擴容與監控,提出了一種基于CAN(Controller Area Network)總線的電磁發射測控系統實現方案;首先根據電磁發射裝置的具體要求和CAN總線通信協議特性,制定了CAN總線應用層通訊協議,開發了基于Visual C# 的上位機監控軟件,實現了遠程監控;然后通過對CAN總線節點固件程序的特殊設計及在高電壓、大電流及強磁場極端環境中的電磁兼容設計,保障了總線測控系統的可靠性與安全性;實驗結果表明:該測控系統具有網絡化、模塊化、智能化等優點,為電磁發射系統的模塊化集成設計提供了一條新途徑。
電磁發射;脈沖成形網絡;測控系統;CAN總線
隨著電磁發射技術與設備的不斷發展,電磁發射系統的容量和規模也在不斷提高與擴大,控制系統也逐漸從集中式走向離散化[1-3]。傳統的采用集中控制方式的PFN測控系統,在進行系統擴容與維護的時候需要耗費很大的人力物力。脈沖成形網絡測控系統的發展也經歷了從無到有的幾個階段。在控制器選擇方面,主要有計算機(PC、工控機等)、可編程邏輯控制器(PLC)、微處理器(MCU、DSP等)等。文獻[4]使用PC作為系統控制器,能實現對8路脈沖成形網絡單元的數據采集與控制;文獻[5]采用PC-DAQ采集卡實現了對脈沖成形網絡單元的多路數據采集與控制,并開發了基于Visual C++ 6.0的上位機監控軟件。文獻[6]在2008年開發的電磁發射測控系統使用PLC作為系統控制器,但由PLC構成的系統體積龐大,不利于對系統進行集成與小型化設計。在使用微處理器作為控制核心方面,文獻[7]開發了基于AT89S52單片機的三級重接型電磁發射測控單元;文獻[8]開發了基于TMS320LF2407A的電磁發射測控系統。
為了能發射質量更大的彈丸,獲得更高的初速,通常需要幾十,甚至幾百個PFN模塊,從試驗的安全性、適用性、抗干擾和性價比等方面考慮,用傳統的PC插板式或獨立機箱式測控系統不利于實現電磁發射系統靈活的擴容與控制。
控制器局域網(簡稱CAN)是由德國BOSCH公司開發的一種總線協議,是當前自動化領域中應用廣泛的現場總線之一,它在離散系統控制、糾錯能力、開放性等方面都具有很強的優勢。文獻[9]將CAN總線技術應用在電磁炮試驗數據采集系統中,每一個CAN總線節點采用8031單片機作為主控芯片,由傳感器組件、高速A/D轉換和數據存儲組件和CAN接口組件組成,負責對一路信號進行采集和存儲,并不具有時序觸發控制功能。文獻[10]選用CAN作為電磁發射中高功率脈沖電源的控制系統,通過CAN總線節點實現電磁發射脈沖電源的觸發控制和電樞初速測量。由于現場總線直接與所有受控節點相連,僅傳輸簡短的控制命令,將實際的控制內容直接下放到每個節點微處理器上,使得系統實時性好、可靠性高,具有廣闊的應用前景,是今后電磁發射測控系統研究的一個重要方向。
本文提出了一種基于CAN總線通信的集控制與測量于一體的電磁發射測控系統。該系統將每個PFN作為CAN總線網絡的一個節點,采用STM32微控制器作為PFN節點的主控芯片,可以實現對PFN節點的充放電、時序觸發等控制,以及狀態監測、儲能電容電壓及放電電流數據采集等功能,并且便于系統的擴容與維護。
1 整體方案分析與設計
1.1 總體設計分析
脈沖成形網絡能夠將儲存的大量電能在很短的時間內進行釋放,其放電過程具有時間短、電流大等特點。監測控制單元主要包括放電時序控制和電流波形的采集,其要求有別于對其他電氣系統的監測。首先,脈沖成形網絡放電在瞬間完成,要求監測裝置的采集速度高,高頻特性好;其次,脈沖成形網絡放電電流大,不易使用分流電阻直接測量,需要使用電流互感器間接測量后再做信號還原,信號容易失真;再次,脈沖成形網絡的各節點為異步放電,放電時序需要微秒級的精確控制;最后,脈沖成形網絡的放電電流產生強磁干擾,對監測系統電磁兼容性要求較高[11-13]。
根據以往經驗,將其測控性能需求進行如下量化: 時序觸發控制精度精確到1 μs,可配置的大小為0~200 μs。 要求測量裝置具有12位以上的采樣精度,采樣頻率大于500 ksps。 最終的波形記錄數據量為2 ms內的電流數據,在頻率為512 ksps時,一共是1 024個單字(2 048 Byte)。
根據PFN節點通訊的要求,數據傳輸需要較高的時效性,便于收發各種控制命令;總線要有較高的傳輸速率,便于波形數據的上傳;同時協議應有利于數據的中距離傳輸。另外,為了配合系統實現,各節點控制器需要具備電壓檢測、觸發控制等功能。
1.2 整體設計方案
在基于CAN總線的PFN測控系統中,每個CAN總線節點測控模塊對應一個PFN節點,測控模塊負責PFN儲能狀態診斷、放電波形記錄和放電時序控制等工作,其結構如圖1。
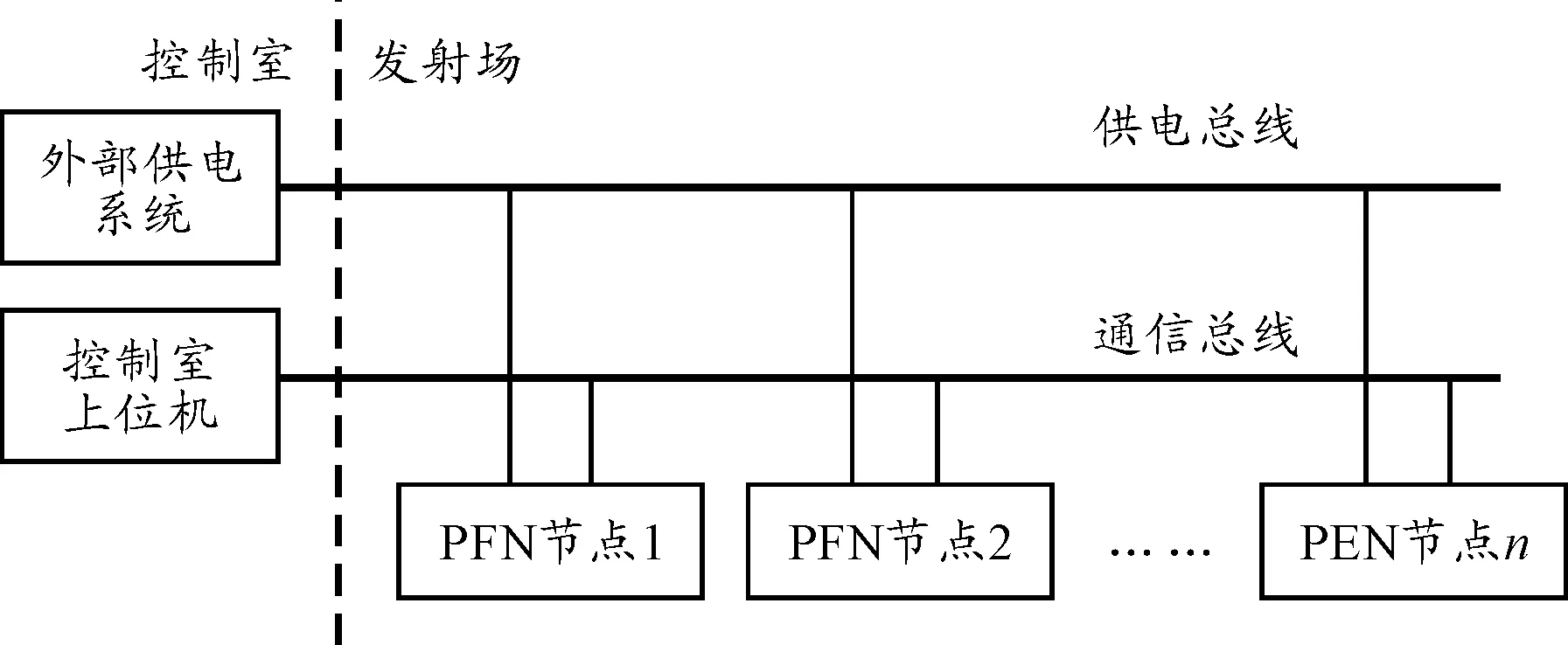
圖1 采用CAN總線的PFN測控系統結構
系統中各節點的電源與數據均以總線型拓撲結構連接,測控系統只需要四根電纜便可以實現,最大限度地減少導線間的受磁面積。工控機作為一個CAN控制節點通過CAN適配器接入到CAN總線網絡,負責發送控制命令和回收節點狀態與采集的數據。由于測控節點與PFN節點一一對應,在PFN系統擴容與維護時,只需要增加或減少相應的測控節點即可,耦合度降為最低。
2 PFN測控系統實現
2.1 硬件實現
測控系統模塊使用CAN總線進行通訊,每個測控系統模塊是CAN總線網絡中的一個節點,每個測控模塊節點負責監測和控制一個PFN節點。PFN節點電容的儲能電壓和放電電流均遠遠超出ADC的輸入范圍,因此需要將模擬信號調理后再測量。本系統儲能電容電壓測量采用高壓電阻分壓器,放電電流測量采用羅氏線圈及積分器實現,并通過電壓電流模擬信號采集的電壓調理電路轉換為STM32片內AD轉換所允許的輸入電壓。
STM32集成高性能CAN2.0B接口控制器,控制器有GPIO管腳輸入輸出,而GPIO管腳為普通TTL電平,TTL電平適用于板上通訊,對于遠距離通訊電平的信號強度與抗干擾能力都有欠缺,為了實現CAN總線組網,需要將CAN控制器輸出TTL電平轉化為ISO11898標準所規定的差分信號,并進行相應的保護。
CAN通訊接口設計包含收發器、隔離器、隔離電源和ESD 4項內容。在本設計中采用NXP公司的CAN保護二極管PESD1CAN實現ESD保護,綜合比較“一體隔離收發器ADM3053”和“隔離收發器ISO1050+DC-DC隔離電源B0505”方案后選了價格相對合理的“ADUM5241+TJA1050T”方案,其電路結構如圖2所示。
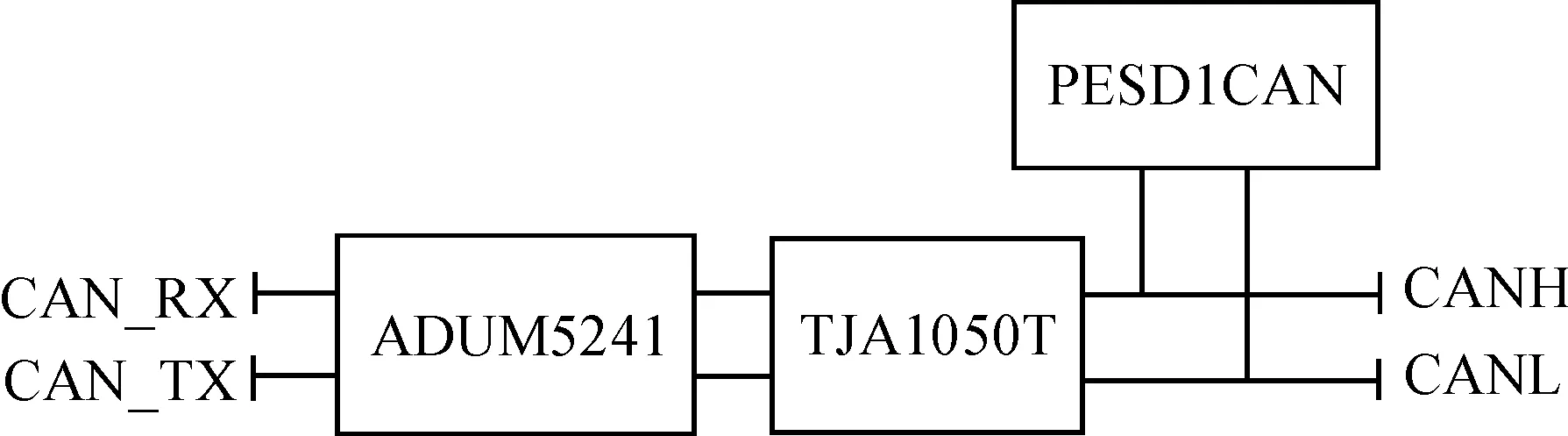
圖2 CAN接口電路設計
2.2 軟件設計
根據設計要求,界面顯示各節點的儲能電容電壓、放電驅動模塊狀態和放電延時時間,刷新間隔小于1 s;通過點擊界面上的按鈕,可以實現對各節點模塊的控制與設置,功能包括閉合或斷開儲能繼電器、設置放電延時時序和觸發放電;在觸發放電之后PC機界面軟件將讀取與顯示各節點的放電電流波形。
基于CAN總線監控系統為請求-應答機制[14],即PC機主節點發送命令請求,各測控節點處理器響應命令請求做應答回應,其中PC機界面軟件使用查詢方式接收CAN總線數據,下位機節點固件程序使用中斷方式接收CAN總線數據。節點的固件程序使用查詢-中斷結構,節點程序流程如圖3。
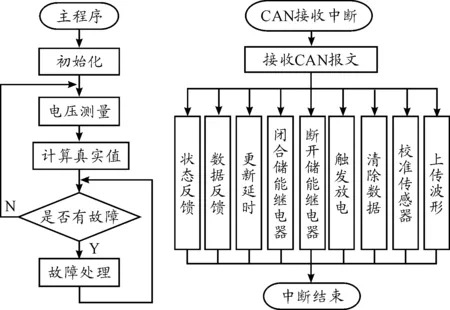
圖3 固件程序結構流程
為了同步各節點的觸發,需要確保觸發命令執行的優先級,所以將CAN總線數據接收設計為中斷方式;程序主循環體做數據采集與數字濾波計算并將計算結果存入全局變量中以備使用。
2.3 總線協議制定
控制器局域網總線通信網絡是一個依照開放式系統互聯模型(Open Systems Interconnection模型,簡稱OSI模型)規范層次結構設計的通訊網絡,但由于CAN總線側重工業控制,數據傳輸量小,因此CAN總線網絡底層只采用OSI模型的最低兩層,即物理層和數據連接層。
由于CAN總線網絡缺少高層規范,為了實現系統的通訊,需要自行進行定制總線協議[15]。權衡通訊速率和實現難度,定義通訊規范如表1。
規范將基本標識分為操作號和節點編號兩部分,其中操作號占用基本標識的高4位,節點編號占用基本標識的低7位,0號節點為主節點,最多容納127個從節點。當主節點發送廣播命令時,節點編號為主節點編號;當主節點向特定從節點發送命令時,節點編號為此從節點的節點編號。某些操作中,擴展標識可用于發送一個數據。

表1 應用層通信規范
2.4 電磁兼容設計
大功率脈沖電流放電將會產生強大的電磁干擾,電磁干擾輕則影響實驗精度,重則損壞器件危及人身安全,因此電磁兼容設計是實驗成功的必要保障[16]。與采用計算機板卡的分布式電磁發射測控系統相比,基于CAN總線的PFN測控系統在電磁兼容性設計上與常規設計方法有所不同。
采用CAN總線的電磁發射測控系統在放電過程中受干擾的耦合回路有CAN總線電纜、交流220 V電纜、電壓檢測電纜和電流檢測電纜,而直流500 V電纜和充電電流在放電前被切斷不需要考慮,放電回路本身就是干擾源也不需要保護。為了減小耦合回路面積可以使用雙絞線或者同軸電纜,實際應用中同軸電纜存在一定程度的偏心,影響抑制效果,所以本試驗中選用帶屏蔽層的雙絞線實現電源、通訊網絡和傳感器的連接。總線連接方式如圖4所示。
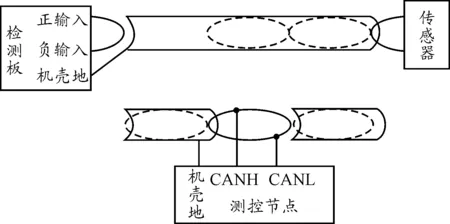
圖4 總線連接示意圖
屏蔽層與測控節點單端接地,用于消除節點自身產生的電場干擾,在組網連接中屏蔽層各段之間無連接,避免形成耦合路徑。
從整體上看,兩個節點模塊和任何兩個沒有隔離的電纜便可形成耦合回路,回路面積越大敏感程度越高。在實驗初期,由于缺少必要的隔離,形成了“節點A→CAN電纜→節點B→24 V電纜→節點A”的回路,放電的強磁脈沖直接擊毀測控節點模塊上的CAN收發器。設計中根據不同性質的連接采用了多種不同方式的隔離。如直流5 000 V采用繼電器隔離,交流220 V采用變壓器隔離,儲能狀態監測和觸發信號采用光電耦合器隔離,PFN放電電流傳感器采用羅氏線圈隔離,CAN總線收發器的電源與通信采用隔離模塊ADUM5241進行隔離,電壓測量模塊采用HCNR201線性光耦進行隔離等。
3 試驗驗證
進行試驗驗證的電磁發射系統有6組PFN,高壓充電電源通過星型拓撲結構與各節點相連。發射裝置整體電氣連接如圖5所示。
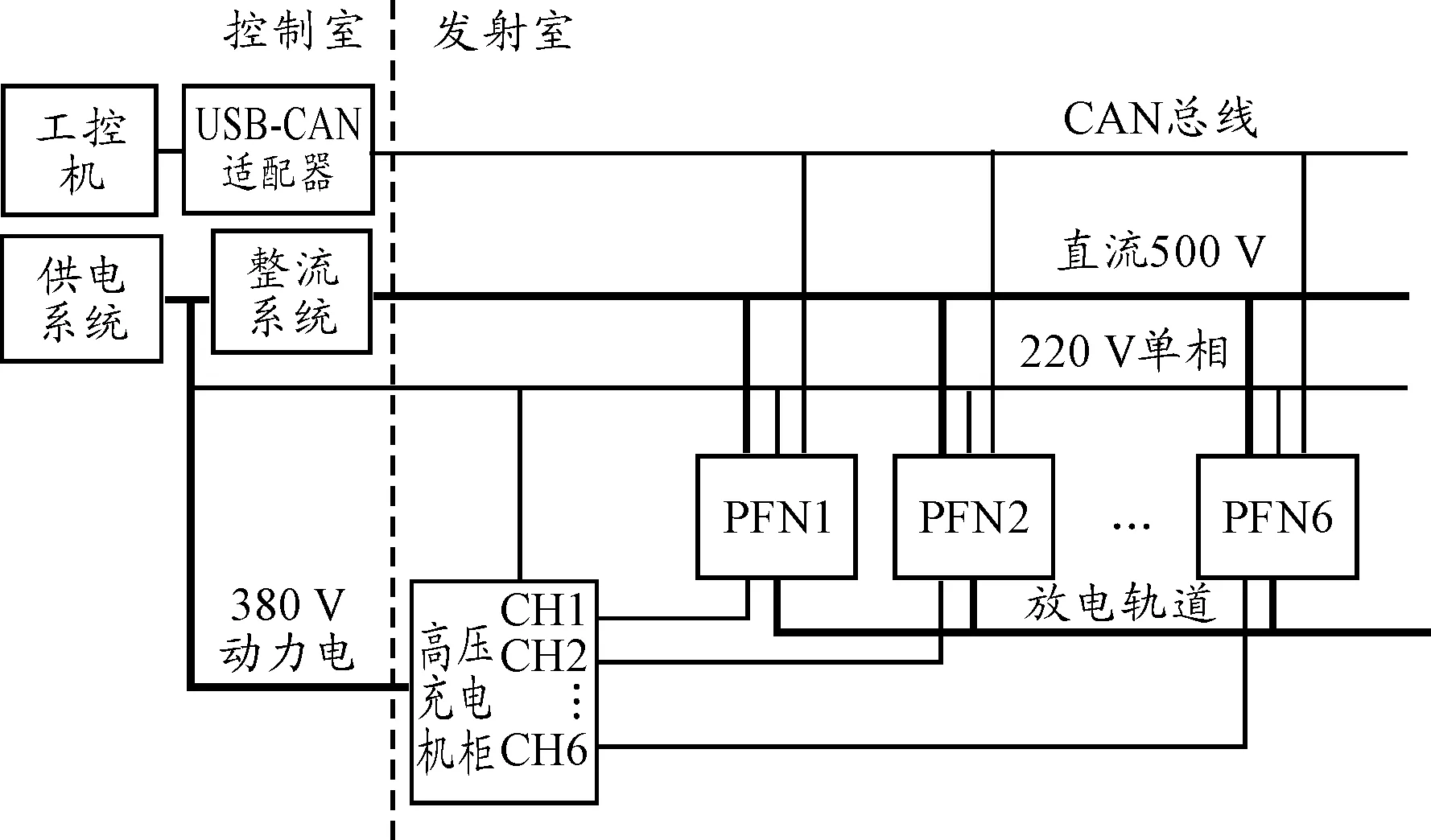
圖5 電磁發射試驗裝置電氣連接
每個PFN節點的測控單元采用電阻分壓器和羅氏線圈分別測量PFN儲能電容充電電壓和放電電流,并利用CAN總線實現組網通訊。主控板向PFN節點控制板發送充電和放電命令,并采集儲能電容狀態信息。儲能電容的狀態監測和觸發控制信號都有光電耦合器隔離。脈沖成形網絡工作時具有高電壓、大電流、強磁場等特點,為了保證總線監控系統工作的可靠性與安全性,對基于CAN總線的PFN測控系統的電磁兼容性設計是實際系統應用中需要解決的主要問題之一。
通過上位機設定6路PFN的充電電壓為3 kV,等間隔放電時序為5 μs,充電結束后,界面狀態如圖6所示,3 kV放電電流波形如圖7所示。

圖6 觸發準備界面狀態

圖7 3 kV放電電流波形
從試驗結果可以看出,基于CAN總線的PFN測控系統實現了電磁發射過程中對電容充電電壓和放電電流的實時監測,并可實現微秒級的時序觸發控制。通過多次試驗,驗證了該測控系統良好的電磁兼容性和安全可靠性。
4 結論
電磁發射試驗是一種高電壓、大電流放電的脈沖功率試驗,能量主要來源于脈沖成形網絡,試驗中脈沖成形網絡待測信號多、位置分散,試驗環境具有強電磁脈沖干擾。從電磁發射裝置容量的擴充及實驗的安全性、適用性、抗干擾等多方面考慮,用傳統的工控機板卡或獨立控制機箱很難實現電磁發射系統的模塊化集成增容及對脈沖成形網絡的長期穩定數據采集。基于CAN總線的數據采集系統由主控計算機和若干個現場數據采集節點組成,該系統具有網絡化、智能化、全分布等特點。本文通過對CAN總線節點固件程序的特殊設計及在高電壓、大電流及強磁場極端環境中的電磁兼容設計,滿足了電磁發射及其他脈沖功率試驗參數實時監控需求,可以實現系統擴容與監控。
[1] 王明東,王天祥.新概念武器的現狀與發展趨勢[J].四川兵工學報,2014(6):1-5.
[2] 李軍,嚴萍,袁偉群.電磁軌道炮發射技術的發展與現狀[J].高電壓技術,2014,40(4):1052-1064.
[3] 翟利鵬,馮俊文,王華亭,等.電磁軌道發射系統總體情景規劃研究[J].中國工程科學,2008,10(8):45-50.
[4] 秦實宏,鄒積巖,何俊焦,等.電磁軌道炮信號控制處理系統的研究[J].華中理工大學學報.1998,26(9):75-77.
[5] 劉福才,王世國,王振春,等.電磁發射測量系統的設計與實現[J].兵工學報,2008,29(10):1256-1261.
[6] GARD M.Institute for Advanced Technology’s Small-Caliber Launcher Automated Control System[J].IEEE Transactions on Magnetics,2008,45(1):1-5.
[7] 黃海,高俊山,李文龍.電磁發射器DSP控制系統的設計[J].自動化技術與應用,2007,26(3):92-95.
[8] 張柯,鐘和清,林福昌,等.基于DSP和FIFO的多路高速數據采集系統在PFN中的應用[J].電測與儀表,2006,43(12):37-41.
[9] 李治源,胡金鎖,段效軍,等.CAN總線在電磁炮試驗數據采集系統中的應用[C]//第二屆中國測試學術會議論文集.出版地不詳:出版單位不詳,2002:209-214.
[10]支彬安,雷彬,李治源.基于CAN總線的脈沖電源控制與測試系統研究[J].電子測量技術,2007,30(8):167-169.
[11]WANG Z C,LI H G,WEN Y T, et al.Analysis of a Series Augmented Railgun Launching Process[C]//Electrical Machines(ICEM),2010 XIX International Conference on.IEEE,2010:1-4.
[12]LI J,LI S,LIU P,et al.Design and Testing of a 10-MJ Electromagnetic Launch Facility[J].IEEE Transactions on Plasma Science,2011,39(4):1187-1191.
[13]WANG Z C,LI H G,ZHAN Z J.Simulation and Analysis of an Augmented Railgun Launching Process[J].Journal of Harbin Institute of Technology,2012,19(2):53-58.
[14]支彬安,雷彬,李治源,等.電磁線圈驅動中 CAN 通信及其實現技術[J].電子工程師,2007,33(11):58-61.
[15]王邦繼,劉慶想,李相強,等.CAN總線應用層協議的研究與實現[J].計算機工程與應用,2011,47(20):14-16.
[16]劉福才,李強,康衛.一種高壓真空觸發開關脈沖變壓器的設計[J].四川兵工學報,2010,31(3):75-82.
(責任編輯周江川)
Design and Implementation of PFN Measurement and Control System Based on CAN Bus
QIN Li1,2, ZHANG Jia-yu1, ZHANG Xiao-lin1, WANG Da-zheng1, LIU Fu-cai1
(1.Key Laboratory of Industrial Computer Control Engineering of Hebei Province, West Campus, Yanshan University, Qinhuangdao 066004, China; 2.Key Laboratory of Power Electronic Energy Saving and Transmission Control of Hebei Province, West Campus, Yanshan University, Qinhuangdao 066004, China)
In order to realize integrated modular of the Pulse Forming Network (PFN) and make the Electro Magnetic Launch (EML) system extend and maintain easily, a solution based on CAN bus for electromagnetic emission measurement and control system was proposed. Firstly, according to the specific requirements of electromagnetic launchers and the characteristics of CAN bus communication protocol, the application layer protocol of CAN bus and a software based on Visual C# as the system man-machine interface were developed, which implemented remote monitoring. And then, through special design on the CAN bus node firmware and electromagnetic compatibility design for extreme environment of high voltage, large current and strong magnetic field, the reliability and security of the bus control system was guaranteed. The experimental results show that this measurement and control system has advantages of network, modularization, intelligence, which provides a new way for modular integration design of electromagnetic launch system.
electro magnetic launch; pulse forming network; measurement and control system; controller area network
2016-08-12;
國家高技術研究發展計劃(863計劃) (2012AA)
秦利(1984—),女,博士,主要從事新概念武器控制技術、數據采集監控系統與管控一體化研究。
10.11809/scbgxb2016.12.005
秦利,張佳宇,張曉林,等.基于CAN總線的PFN測控系統設計與實現[J].兵器裝備工程學報,2016(12):22-26.
format:QIN Li, ZHANG Jia-yu, ZHANG Xiao-lin,et al.Design and Implementation of PFN Measurement and Control System Based on CAN Bus [J].Journal of Ordnance Equipment Engineering,2016(12):22-26.
TB21
A
修回日期:2016-09-10
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
