高速機器人分揀系統機器視覺技術的應用
2017-01-09 08:21:21李麗麗熊倍華賈海龍
裝備制造技術 2016年11期
李麗麗,熊倍華,賈海龍
(1.順德職業技術學院,廣東順德528300;2.廣東省智能制造研究所廣東省現代控制與光機電技術公共實驗室,廣東廣州510070;3.華南智能機器人創新研究院,廣東佛山528315)
高速機器人分揀系統機器視覺技術的應用
李麗麗1,熊倍華2,賈海龍3
(1.順德職業技術學院,廣東順德528300;2.廣東省智能制造研究所廣東省現代控制與光機電技術公共實驗室,廣東廣州510070;3.華南智能機器人創新研究院,廣東佛山528315)
研究了機器視覺技術在高速機器人分揀系統中的應用。構建攝像機標定下的人機交互界面,針對有關圖像處理算法進行分析,提出結合多目標中心及角點結合輪廓特征識別的算法,從根本上解決當前分揀作業過程中存在的問題,提升機器人分揀系統的整體運行效果。
高速機器人;機器視覺技術;分揀系統
由于當前經濟不斷進步,人民生活水平不斷上升,傳統產業結構升級已經逐漸成為各個行業發展的共同方向。將機器人等想法與傳統食物產業融合,能夠確保食物在生產過程中的安全性,同時也能夠提高生產效率。當前機器視覺技術普遍存在可靠性高、非接觸測量以及柔性好等特征,并已經在虛擬現實、視覺導航以及工業自動化中有了廣泛應用。
1 高速機器人分揀系統的組成部分
文章基于六自由度機械臂,構建了以視覺、工件平臺及機器人控制為主要部分的機器視覺分揀系統。其中視覺單元由CCD攝像機、支架及軟件構成。在系統運作過程中,通過支架懸掛的單目攝像機,將試驗臺上的工件視圖像記錄下來,隨后將目標種類識別顯示出來,并計算設施的擺放方向與質心。最后基于物理或圖像坐標系間的關聯性,明確目標的方向及位置,并將計算參數傳輸至控制柜。工件平臺包括工件放置槽及放置臺。而工件放置平臺的顏色能夠幫助金屬工件出現顯著的顏色反差,便于進行計算,而工件放置槽的作用在于放置不同用途的工件。機器人控制單元主要包括六軸機械臂以及控制柜。該內容主要是用于參數的分析,并結合分析數據指導機器人實施相關操作,從而更好地完成分揀、放置等動作。如圖1所示。
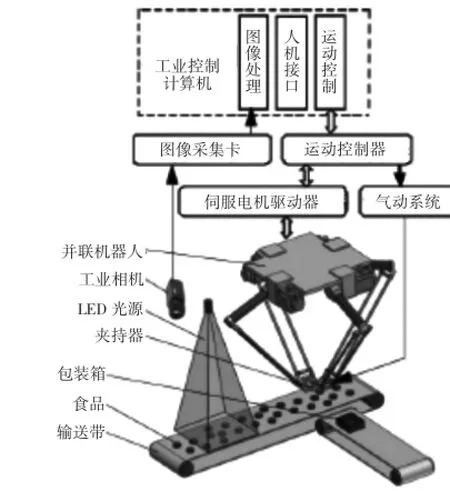
圖1 高速并聯機器人自動分裝系統
機器人分裝系統普遍分為上位機控制體系與下位機控制體系兩種。這里的上位機工控機通過工業相機將搜集到的運動食品圖像傳輸到皮帶上,隨后運用機器視覺算法的方式,針對運動食品展開跟蹤、定位與分級等工作;上述操作完成后,下位機就可以驅動并聯機器人,進而將食品分裝入包裝箱內。
2 高速機器人分揀系統機器視覺技術的應用
2.1 攝像機標定及圖像預處理
作為視覺系統技術開發的關鍵性步驟,攝像機標定存在的目的就是構建二維世界與三維世界間的對應性關聯。攝像機標定在實現過程中具備多種方式,如直接線性發、兩步攝像機標定法等。本文主要運用OpenCV算法庫實現針對性的攝像機標定算法。結合棋盤格構建標定需要的模板,同時從多個角度對其進行拍攝,從而獲取多個不同位置的目標圖像,根據圖像點間的對應性關聯將攝像機內外參數分別標注出來。通過這一方法實現空間坐標系向圖像坐標系的轉變。整個標注過程分別用到:圖像坐標系、世界坐標系與攝像機坐標系。
在實施圖像預處理時,其目標就是對圖像數據的信噪比進行提升,從而抑制背景噪聲。而圖像預處理結果將直接影響到對機械工作的角度、面積、邊緣、物體質心等特點的獲取。在進行邊緣檢測時,主要采用檢測算子包括Laplacian、Canny、Sobei等,其中Canny算子具備更為優質的信噪比,在噪聲環境下產生更優質的檢測成效,能夠適應更多環境下的邊緣檢測措施。本次研究基于Canny邊緣檢測算子[1]。基于Canny算子實施預處理之前,需要對二值圖像進行膨脹處理,讓其邊緣更具顯著性利于后期觀察。
2.2 角點檢測方式與Hough圓檢測方法
常規圖像識別方式包括模板匹配、SIFT匹配以及角點匹配。雖然運用完善后的SIFT圖像插值技術能夠大幅度提升降維處理的速率,精準地描述向量特征,不過目前幾何分揀系統表面存在的特征性向量,很多都無法使用SIFT算子完成特征識別行為。本文在完成圓形工件的檢測之后,運用角點檢測方式對多邊形工件特征進行數據信息提取。角點主要是水平與數值兩個不同方向具備極大變化性的點,目前具備成熟度的角點檢測方法包括Susan、Shi-Tomasi以及Harris算法。本次研究運用Harris算法進行角點檢測,促使圖像旋轉及灰度變化具備極高的穩定性。
一般情況下,在進行圖像預處理之后,將實施圖像特征識別及提取。若檢測過程中發現目標工件形狀為圓形,說明該工件不存在角點,則不能使用角點檢測方法,所以此時需要使用Hough圓檢測方法對其進針對性、有效的識別。Hough變化原則就是運用參數及圖像空間間存在的對應性關聯,結合參數空間實施簡易的統計累加行為從而完成檢測任務。同時連接部分邊界不連續的邊緣,具備一定的抗噪音干擾能力。
2.3 幾何中心計算、輪廓的找尋與逼近
在實現機器人分揀操作過程中,首先需要實現已經識別分揀工件的定位,常規使用質心坐標對工件位置信息進行描述。不過在進行多目標質心計算之前,需要明確群目標集合中心的計算方法,確保其簡單性。
Canny邊緣檢測算法能夠基于像素的差異性對圖像輪廓的邊界像素進行檢測,不過檢測過程中并非將輪廓視為一個整體,而是分開檢測[2]。在Canny算子檢測方法下獲取的圖像目標輪廓,隨之通過二值圖像實現輪廓的整體研究,將其歸納成為一個明確的系列點,也就是將其轉化為圖像目標工件中的一個外圍曲線。在OpenCV之中通過二叉樹將輪廓表示出來,便于輪廓實現二次恢復。當系統繪制出多邊形并實施相應的形狀分析行為的過程中,需要對留存在來的輪廓進行精準的多邊形去下逼近措施。而實現逼近的目的就是獲取逼近角點或是目標輪廓。最后通過坐標公式等多種計算方式,對目標角點進行分類,明確其數量。
3 結束語
通過本次研究發現,基于多種幾何工件目標,視覺系統具備極高的穩定性。而該部分識別圖像以黑色為背景,借助反差這一作用對金屬工件進行預處理。在多種技術的支持下,促使機器人分揀系統更加優質、完善。
[1]蔣書賢,李春茂,楊潤芝,周欣.基于機器視覺的平面規則幾何工件分揀方法[J].工業控制計算機,2015(05):34-35.
[2]鄒騰躍,唐小琦,宋寶,陳吉紅.基于形狀內容分析的機器人物料分揀系統[J].組合機床與自動化加工技術,2015(05):67-69.
Application of High-Speed Sorting Systems Robot Machine Vision Technology
LI Li-li1,XIONG Bei-hua2,JIA Hai-long3
(1.Shunde Polytechnic,Shunde Guangdong 528300,China;2.Guangdong Institute of Intelligent Manufacturing,Guangzhou Guangdong 510070,China;3.South China Robotics Innovation Research Institute,Foshan Guangdong 528315,China)
In this paper,the application of machine vision technology in high speed robot sorting system is studied in this paper.Construction of camera calibration under the man-machine interface,according to the analysis of the image processing algorithm,combining with the multi target center and corner based on contour feature recognition algorithm to solve the existing problems in the process of sorting operations fundamentally.The overall operation effect of the robot sorting system.
high-speed robot;machine vision technology;sorting systems;application
B
2016-08-07
廣東省科技計劃項目(2015B010917001);廣東省應用型科技研發專項資金項目(2015B090922008);廣東省粵港共性技術招標項目(2013B010134009);佛山市機電專業群開放課題(2015-KJZX133)
李麗麗(1981-),女,吉林磐石人,碩士,工程師,研究方向:機器視覺、人工智能、圖像處理,大數據;熊倍華(1974-),男,江西南昌人,本科,工程師,研究方向:機器人,結構設計;賈海龍(1990-),男,河南鄭州人,研究生,碩士,研究方向:機器人,控制與視覺。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
