一種風板自動控制裝置設計及測試
2017-01-12 02:44:47江興盟
石家莊鐵路職業技術學院學報 2016年4期
馮 笑 江興盟
(鄭州鐵路職業技術學院 河南鄭州 450052)
一種風板自動控制裝置設計及測試
馮 笑 江興盟
(鄭州鐵路職業技術學院 河南鄭州 450052)
本文提出了一種以單片機STC12C5A60S2為核心的風板自動控制裝置設計方案,結合PWM技術和PID控制器來調節風扇風力大小,從而實現對風板轉角的控制。在設定的功能模式下對風板轉角控制進行了測試,結果表明了該系統工作的可靠性和穩定性,系統具有設計合理、簡單、精度較高等特點。
PWM PID 直流風機 角位移傳感器
1 引言
隨著信息技術的不斷發展,角度測量與控制被廣泛應用于新能源利用、人工智能、機械加工及制造等領域,及時準確的獲取角度信息并對其進行實時控制,在自動化控制過程顯得尤為重要[1]。為此設計并制作了一種風板自動控制裝置,通過控制兩個風機的風量大小來自動控制風板旋轉到預置角度。
2 系統總體方案
直流電機選擇脈沖寬度調制(PWM)調速,利用微處理器的PWM輸出控制風機轉速、調節風力大小。如圖1所示,該系統的總體方案主要包括主控模塊、角度測量模塊、電機工作模塊、電源模塊等四部分,其中主控模塊有單片機、鍵盤輸入、液晶顯示及聲光報警等組成。
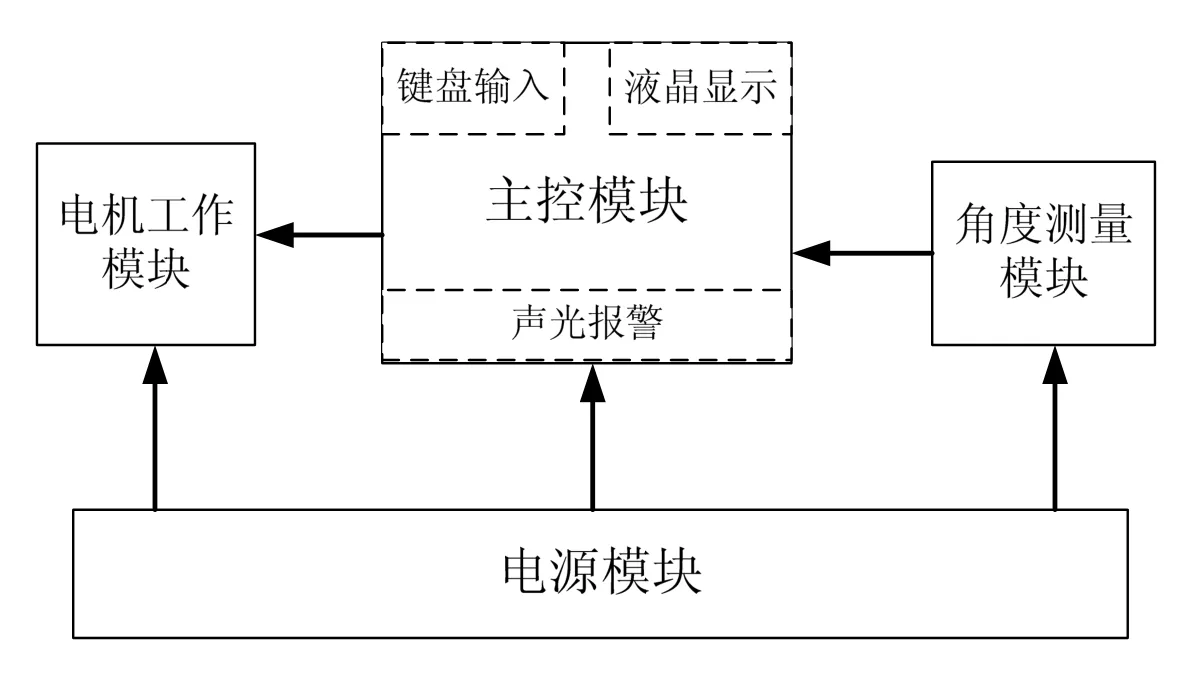
圖1 系統總體方案
3 理論計算與分析
3.1 直流電機的PWM調速原理
直流電機的PWM是通過控制直流電源通斷的頻率即改變直流電機電樞上的“占空比”,從而改變負載上平均電壓的大小,達到控制電機轉速的要求[2][3]。電動機的平均電壓Ud為:

式中:T為開關周期;ton為導通時間;ρ為占空比,Us為直流電源。
3.2 角度控制算法設計
由于對風板的角度控制采用閉環方式,會存在振蕩、超調和穩定性等問題,因此需要加入適當的調節算法使其達到準確控制目的。PID調節器具有原理簡單,適用面廣,參數選定比較簡單等優點,成為溫控系統、角度控制系統等常用的調節算法[3][4]。相比較于位置式PID控制算法,增量PID控制算法具有諸多優點,因此,本文采用數字增量式PID控制算法[5]。增量PID算法公式如下所示:

式(1)中:KP為比例系數;KI為積分系數; KD為微分系數。
最終可簡化為:

式中:

電機轉速是由單片機PWM輸出控制,而電壓的大小由PWM調節,因此,只要每隔一個采樣周期通過改變PWM占空比的方法改變電機電樞上的電壓,實現PID調節控制。基于PID的反饋控制策略需要根據系統動力特性和響應要求,適當調節PID參數,以確定最優參數值[6]。
4 硬件設計
4.1 主控模塊
系統以STC12C5A60S2單片機為控制核心,STC12C5A60S2是宏晶科技生產的一款高速、低功耗、強抗干擾的8051單片機,內部集成MAX810專用復位電路、2路PWM、8路高速10位AD轉換[7]。角度測量采用WDD35D4精密電阻式角度傳感器,它具有機械壽命長,分辨率高,轉動順滑,動態噪聲小的優良性能。顯示部分采用LCD1602液晶顯示器,聲光報警部分采用發光二極管與蜂鳴器。如圖2所示主控模塊硬件電路圖。
4.2 風機工作模塊
系統左右各有一個相同直流風機,風機驅動采用L298N橋式電機驅動芯片, L298N工作電壓高、輸出電流較大,內含兩個H橋的高電壓大電流全橋式驅動器,可以用來驅動直流電動機和步進電動機,具有信號指示、轉速可調、抗干擾能力強、具有過電壓和過電流保護、PWM脈寬平滑調速,而且能夠使用TTL電平進行控制。為保護控制器使系統工作穩定,在STC12C5A60S2單片機與L298驅動之間增加光耦隔離電路。
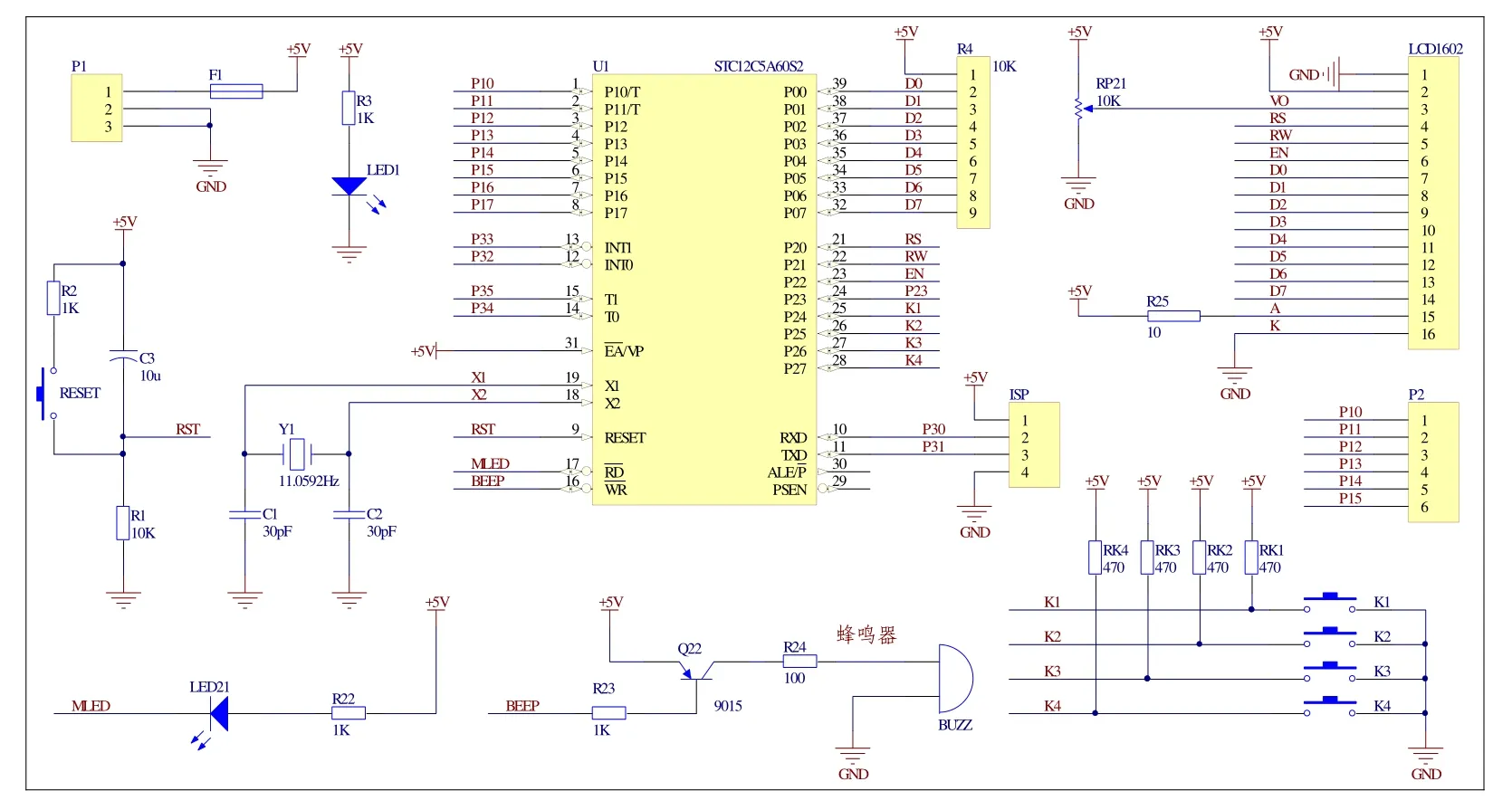
圖2 主控模塊硬件電路圖
5 軟件設計
系統軟件設計采用模塊化設計方式,如圖3(a)所示系統軟件的總體流程圖,其中功能1為預置風板控制角度,功能2為預置兩個控制角度,功能3與功能4為加了重物10g砝碼后的角度控制模式,分別于1、2控制要求相同。如圖3(b)中斷服務程序,用定時器中斷方式采集角度信息,通過PID算法控制單片機輸出的PWM“占空比”方法實現風板控制功能。
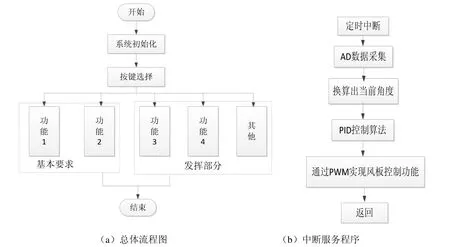
圖3 系統程序流程圖
6 系統測試
裝置制作實物如圖4所示,風板控制裝置包括滑道、直流風機(含底座)、支架、角度指示盤及角位移傳感器,其中傳感器固定于旋轉軸上,風板固定于旋轉軸上,實現同步旋轉。系統測試前首先進行系統調試,使得單片機通過角度傳感器采集并且實現顯示角度即風板當前的角度值,達到與角度盤中指示值一一對應關系的要求。
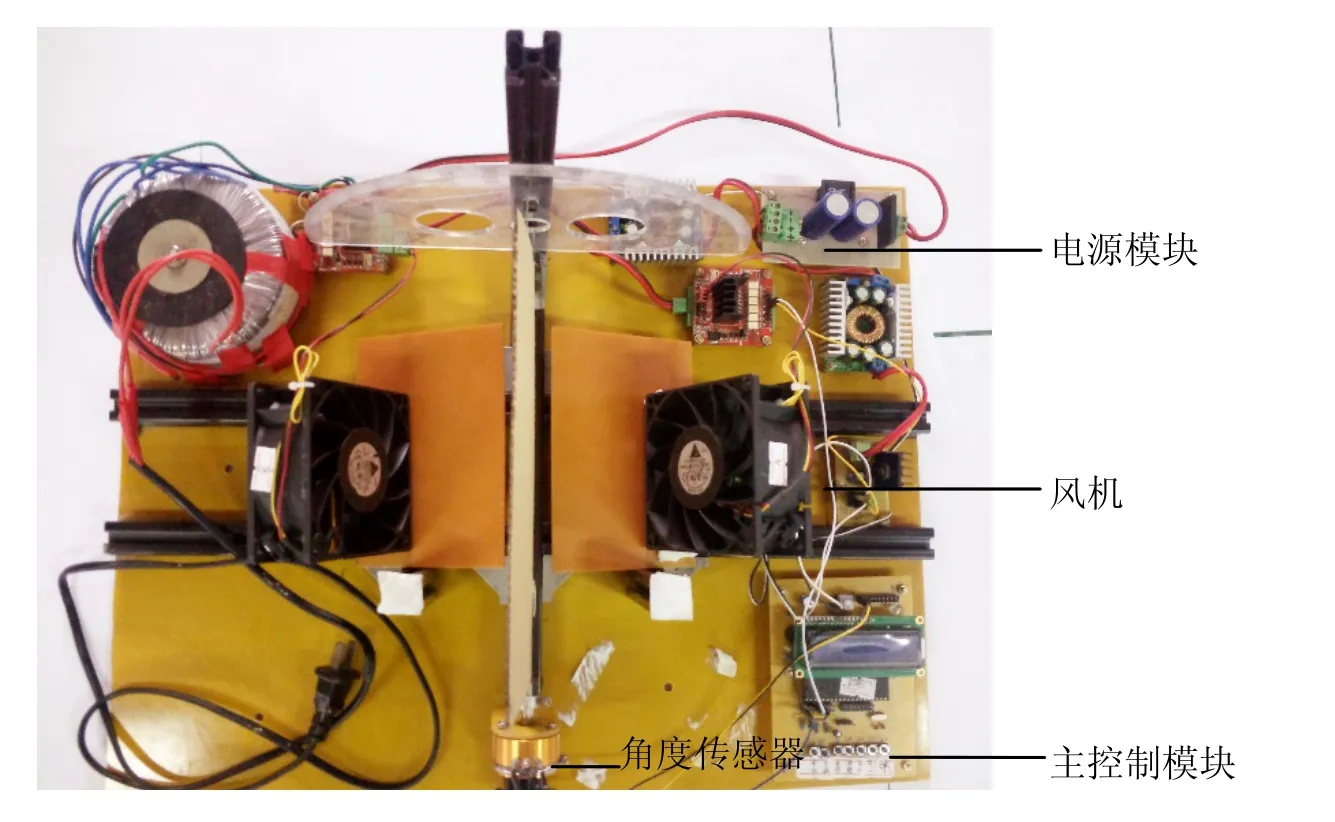
圖4 裝置制作實物
6.1 基本要求
(1)預置風板控制角度45°:系統運行后觀察裝置風板角度的實際值,并且秒表計時風板過渡時間t1和停留時間t2。如下表1所示測試數據反復測量5次,實際預置角度誤差不大于5°,過渡時間不大于10s,停留時間的誤差不大于1s,均滿足誤差要求。
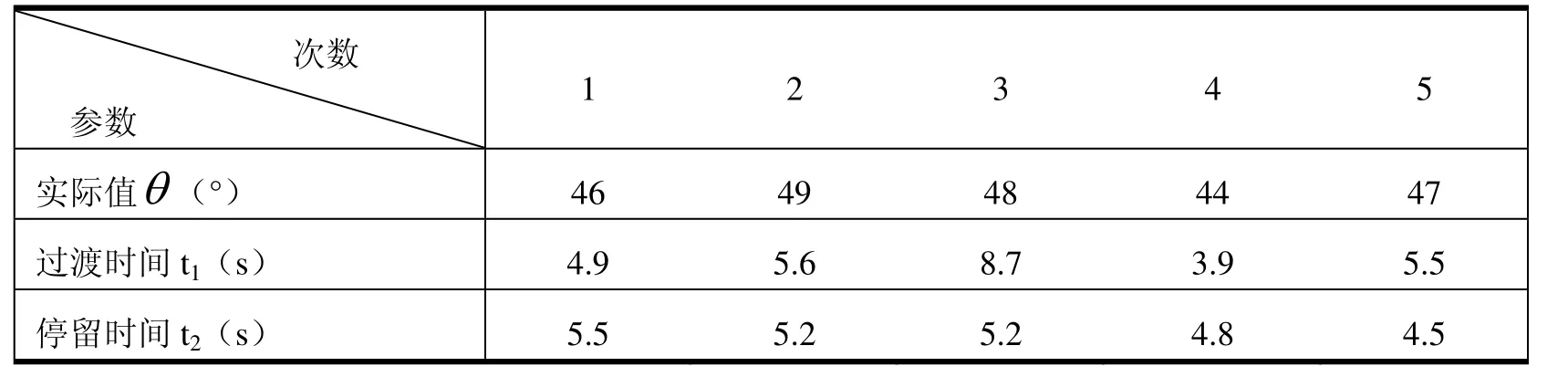
表1 測試數據
(2)預置風板控制角度50°與80°:如下表2所示測試數據,根據設計要求(第一次到達預置角度時間不大于10s,兩角度間擺動周期不大于5s,到達預置角度誤差不大于5°)可知,滿足系統設計誤差要求。
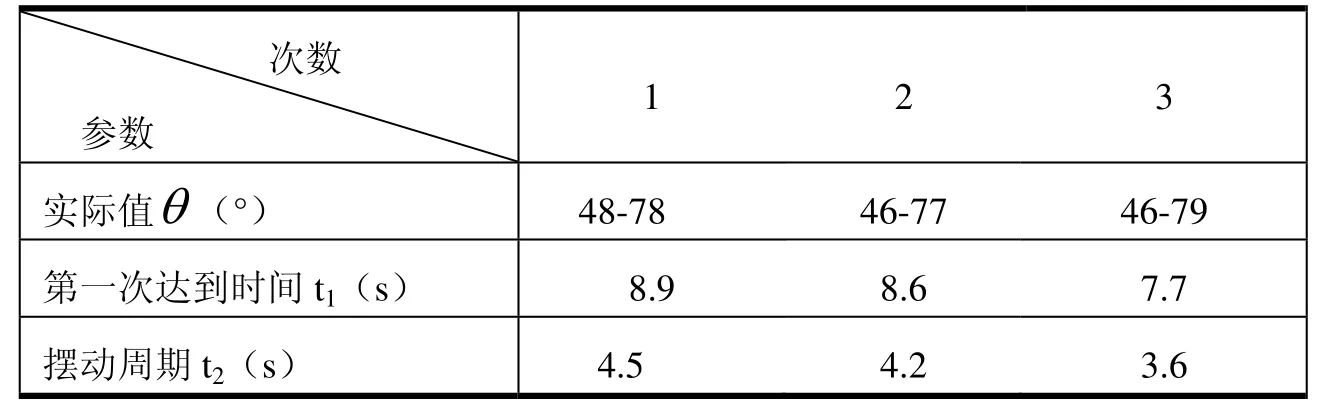
表2 測試數據
6.2 發揮部分
加入10g砝碼后系統工作的測量數據如下。
(1)預置風板控制角度70°:如下表3所示測試數據,測量誤差均達到設計要求。
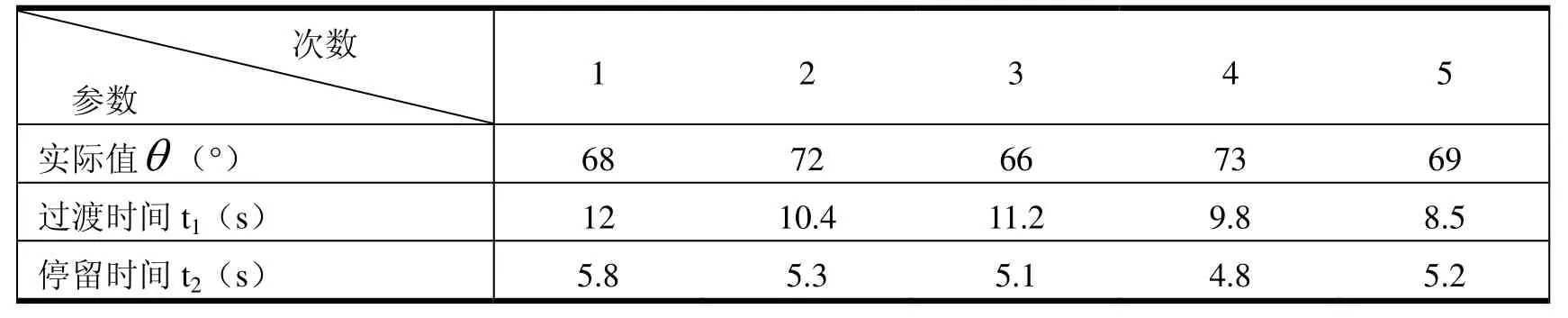
表3 測試數據
(2)預置風板控制角度50°與80°:如下表4所示測試數據,測量誤差基本達到設計要求。
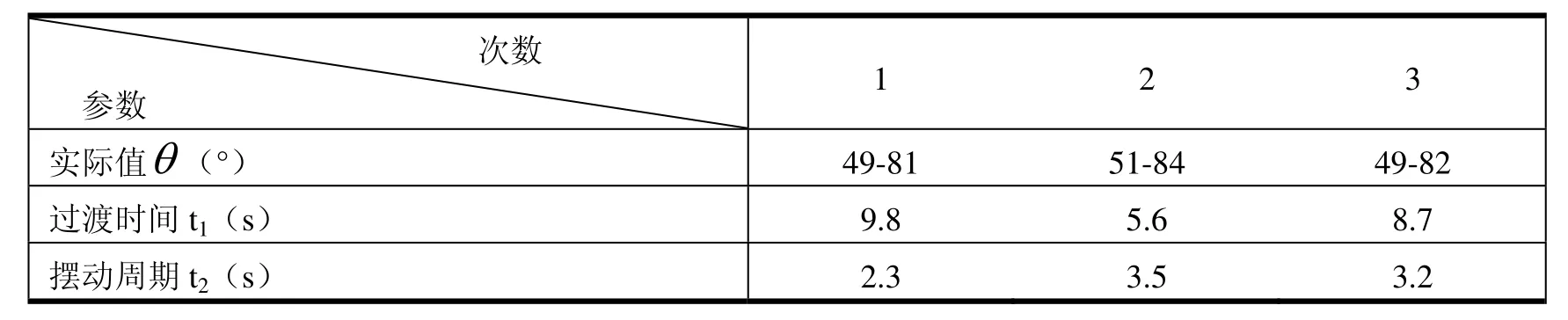
表4 測試數據
由測試結果可知風板控制系統滿足了系統設計的基本控制要求和發揮設計要求,但仍然存在較小誤差,主要干擾因素來自于兩風機的微小差異、電機轉速的非線性、電源的電磁干擾以及傳感器與橫軸同步誤差等。
7 結論
基于單片機的風板控制裝置設計以STC12C5A60S2單片機為控制核心,通過PWM調壓和PID轉速調節方法來控制風機轉速,實現了風板準確旋轉到設定角度的自動控制。系統設計簡單,響應速度快,測量誤差較小,具有工作的可靠性和穩定性等特點。該風板控制系統可以應用于角度測量及控制等技術領域。
[1]陳素芹,賈冕茜,余紅英,陶玉貴.基于MKL26Z256VLL4的風板控制系統設計[J].西昌學院學報(自然科學版),2015,29(4):32-34.
[2]王效華,牛思先.基于單片機PWM控制技術的實現[J].武漢理工大學學報,2010,31(1):94-98.
[3]崔鳴,尚麗,顏廷秦.基于ARM的帆板控制系統設計與實驗分析[J].實驗室研究與探索,2012,31(9):57-62.
[4]王寶剛,李東潔.基于STC89C52的水溫自動控制系統設計[J].制造業自動化,2012,34(9):111-113.
[5]吳強,韓震宇,李程.基于增量式PID 算法的無刷直流電機PWM 調速研究[J]. 機電工程技術,2013,42(3):63-65.
[6]李先允.自動控制系統[M].北京:高等教育出版社,2005.
[7]智海素,李英輝,曲昀卿.基于單片機控制的帆板系統的設計與測試[J].制造業自動化,2012,34(9):133-135.
Design and Test of the Wind Board Control Device
FENG Xiao JIANG Xing-meng
(Zhengzhou Railway Vocational and Technical College Zhengzhou Henan 450052 China)
A design scheme of the wind board automatic control device based on microcomputer STC12C5A60S2 is proposed in this paper, and the device is combined by the technology of PWM and PID controller to adjust the fan’s wind, so as to realize the control of the wind board’s turn angle. In the setting of the function pattern the control for turn angle is tested, and the results show that the system work is reliable and stable. And the system has the reasonable design, simple structure, high precision and so on.
PWM PID DC fan angular displacement sensor
A
1673-1816(2016)04-0075-05
2016-03-15
馮笑(1987-),男,河南南陽人,助教,碩士學位,研究方向電子與通信技術。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
