移動傳感器網絡節點的運動行為控制算法研究
2017-01-12 08:46:17周曉玨
現代電子技術 2016年23期
周曉玨

摘 要: 針對目前移動無線傳感器網絡節點的運動行為控制算法復雜、能耗大的問題,提出了一種復雜程度低、能耗小、魯棒性強的控制算法。算法首先通過航跡推算與RSSI定位移動節點,然后在人工魚群思想的基礎上結合擁擠意愿模型的約束機制來控制節點的趨向目標行為、聚群行為、跟蹤行為和避障行為。最后在Matlab環境下進行節點的運行行為仿真,實驗結果表明所提出的算法能夠正確完成移動節點的聚集、跟隨及避障行為,證明了算法的正確性。
關鍵詞: 移動傳感器網絡; 節點定位; 約束機制; 節點運動
中圖分類號: TN911?34; TP202 文獻標識碼: A 文章編號: 1004?373X(2016)23?0034?05
Research on movement behavior control algorithm of mobile sensor network nodes
ZHOU Xiaojue
(Jiangsu Vocational College of Business, Nantong 226011, China)
Abstract: Since the current movement behavior control algorithm of the mobile wireless sensor network nodes is complex, and has high energy consumption, a control algorithm with low complexity, low energy consumption and good robust is proposed. With the algorithm, the mobile nodes are located by dead reckoning and RSSI. On the basis of the artificial fish thought, the constraint mechanism of crowded desire model is combined to control the nodes′ target trend behavior, cluster behavior, tracking behavior and obstacle avoidance behavior. The operation behavior of nodes is simulated in Matlab environment. The experimental results show that the proposed algorithm can correctly accomplish the cluster behavior, follow behavior and obstacle avoidance behavior of the mobile nodes, and the correctness of the algorithm was verified.
Keywords: mobile sensor network; node localization; constraint mechanism; node movement
0 引 言
近年來,移動傳感器網絡逐漸成為無線傳感器網絡領域研究的焦點。但由于其網絡規模大、能耗敏感且單個節點智能化程度低,在網絡節點的運動行為控制算法上制約因素較多[1?3],并沒有較為成熟的網絡節點運動行為控制算法。
針對上述問題,設計了一種復雜程度低、能耗小且魯棒性強的網絡節點運動行為控制算法。該算法首先通過航跡推算與RSSI定位傳感器節點,然后在人工魚群思想的基礎上結合擁擠意愿模型的約束機制控制節點的運動行為,對于移動傳感器網絡的進一步應用具有重要意義。
1 網絡節點定位算法
航跡推算無需外部信息完成節點的定位,當距離較近時定位精度很高,但隨著節點定位誤差的疊加,根據航跡推算獲得的節點實時位置誤差會發散且無法消除[4?5];而RSSI定位算法能夠確定節點的相對初始位置,消除位置累積誤差且成本較低[6?7]。所以可將航跡推算算法與RSSI定位算法結合起來,就可以實時獲得節點的位置信息。
4 仿真實驗
在基于趨向目標運動行為的基礎上,進行動態聚群行為、跟隨行為和有隊形避障行為仿真,仿真結果如下:
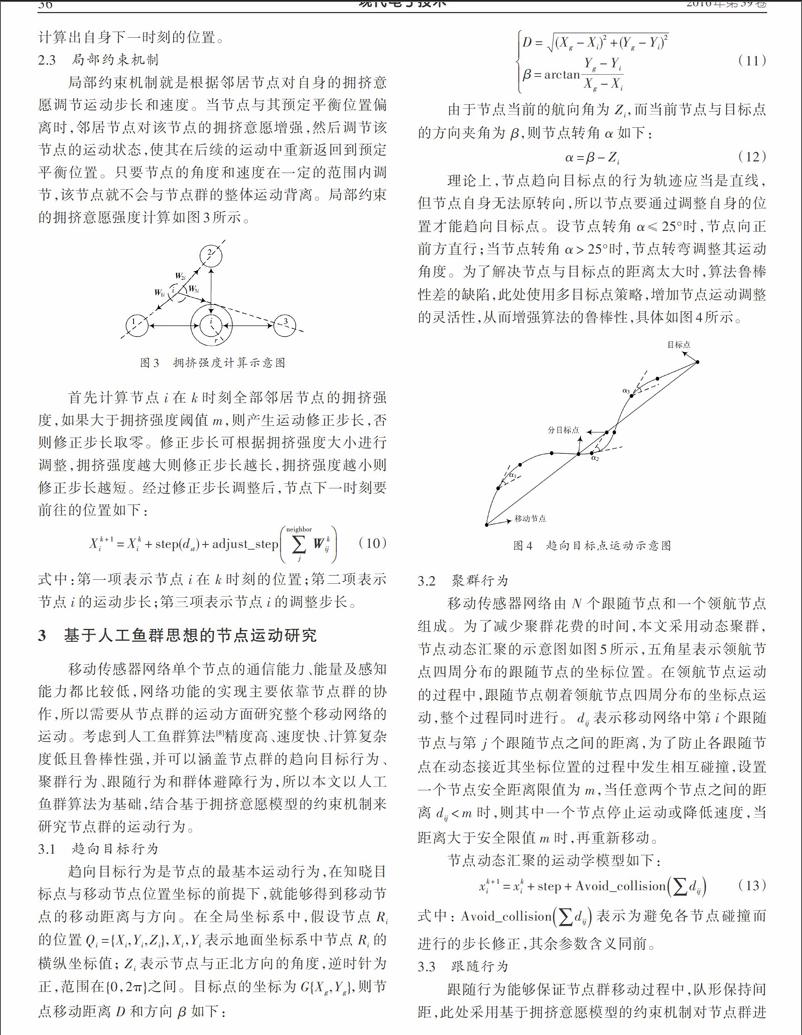
4.1 動態聚群行為仿真
10個實心圓代表10個移動點,領航節點在向目標點移動的同時,跟隨節點依據領航節點為其分配位置坐標進行動態聚群,這里跟隨節點的隊形為三行三列的方陣,各節點初始位置及最終位置分別如圖7,圖8所示。
4.2 移動跟隨行為仿真
10個實心圓代表10個移動點,六角星表示目標位置,跟隨行為仿真的節點初始位置和最終位置分別如圖9, 圖10所示。
4.3 有隊形群體避障行為仿真
10個實心圓代表10個移動點,方框代表墻障礙物,群體避障行為仿真的節點初始位置和最終位置如圖11,圖12所示。
通過上述實驗可以看出,基于擁擠意愿模型的約束機制能夠完成節點聚集、跟隨及避障行為,又能夠提高整個系統的運行效率。
5 結 論
本文以移動傳感器網絡為背景,通過航跡推算與RSSI結合實現了移動節點的精確定位且能耗較低;然后將基于擁擠意愿模型的約束機制與人工魚群思想共同用于節點的運動行為控制,完成了節點的匯聚、跟隨及避障等復雜任務。但后續還需進一步降低算法的能耗與計算量,提高其在移動傳感器網絡中應用的可靠性。
參考文獻
[1] ZHU J, PAPAVASSILIOU S, XU S. Modeling and analyzing the dynamics of mobile wireless sensor networking infrastructures [C]// Proceedings of 2002 IEEE 56th Vehicular Technology Conference. Newark: IEEE, 2002: 1550?1554.
[2] HAENGGI M. Mobile sensor?actuator networks: opportunities and challenges [C]// Proceedings of 7th IEEE International Workshop. Frankfurt: IEEE, 2002: 283?290.
[3] 孫波,陳衛東,席裕庚.基于粒子群優化算法的移動機器人全局路徑規劃[J].控制與決策,2005(9):1052?1055.
[4] 唐宏,鐘璐.基于移動信標節點的無線傳感器網絡定位算法研究[J].信息通信技術,2012(3):51?56.
[5] LUO Y, ZHANG J T, LI X X. The optimization of PID controller parameters based on artificial fish swarm algorithm [C]// Proceedings of 2007 IEEE International Conference on Automation and Logistics. Jinan, China: IEEE, 2007: 1058?1062.
[6] 周林,張厚望.無線傳感器網絡中基于RSSI的質心定位算法研究[J].現代電子技術,2015,38(1):30?34.
[7] 張錚,饒志訓,黃志峰.無線傳感器網絡中RSSI濾波的若干處理方法[J].現代電子技術,2013,36(20):4?6.
[8] 班曉娟,寧淑榮,涂序彥.人工魚群高級自組織行為研究[J].自動化學報,2008,34(10):1327?1332.
