常模盲均衡算法在物聯網無線通信中的應用
2017-01-24 07:41:52馬雪芬孫敏鄧鵬
山東工業技術 2017年1期
關鍵詞:物聯網
馬雪芬 孫敏 鄧鵬
摘 要:通信技術是物聯網的關鍵技術之一,在物聯網系統中的每個部分都涉及到無線通信,在傳統均衡器的基礎上進行了改進,引入常模盲均衡算法,并利用了變步長動量因子提高無線通信的性能,并對算法進行了仿真。
關鍵詞:物聯網;變步長;盲均衡算法
DOI:10.16640/j.cnki.37-1222/t.2017.01.135
物聯網(Internet of Things, IoT)被稱為繼計算機、互聯網之后全球信息產業的又一次科技與經濟發展的焦點,在工業、農業、醫療衛生和教育等領域都有著廣闊的應用前景。2005年國際電信聯盟(ITU-T)發布的物聯網報告[1]中提出:通過傳感器、RFID、通信技術、機器人技術,用互聯網將世界上的物體都連接在一起,使世界萬物都可以上網。集成短距離ZigBee、藍牙、蜂窩移動、衛星通信等各種無線通信技術和互聯網技術實現了信息的多尺度傳輸[2]。優良的無線通信是物聯網能實現的關鍵技術之一。
通信系統中,實際信道的傳遞函數往往是非理想的,且是時變的、未知的,在接收端抽樣時刻總是存在碼間干擾,導致系統誤碼性能下降,信道的自適應均衡是有效克服碼間干擾、增強數據通信可靠性的有效手段之一[3],為此,提出了盲均衡算法。盲均衡不需要訓練序列來維持正常工作,僅依據接收信號本身的統計信息調整均衡器特征。盲均衡算法種類較多,其中以Godard族盲均衡算法中的常模盲均衡算法(CMA)應用最為廣泛。但是常模算法的收斂速度慢,且僅能有效處理單半徑星座的信號,對QAM調制信號性能較差。針對具體問題,常模算法出現了許多改進方法,如變步長算法[4]、多模算法等。
1 常模盲均衡算法
在常模盲均衡器設計過程中,以CMA(2,2)為常模模型。設盲均衡算法代價函數為Jp,目的是為了使Jp達到最小值。輸入信號序列{an},在傳輸速率為1/T Hz的通信系統中傳輸,引入盲均衡器,則輸出信號為根據梯度算法,均衡器抽頭系數的更新方式為可見步長在算法收斂過程中起著非常重要的作用,采用合適的步長因子η,經過若干次迭代,會使得誤差收斂到較小的值,均衡器的系數也趨于穩定。
2 變步長動量常模盲均衡算法
在CMA算法中,若采用固定步長,則不能兼顧收斂速度和剩余誤差的大小。步長較大時,算法收斂速度和跟蹤速度快,當均衡器抽頭系數接近最優值時,其在最優值附近一個較大的范圍內來回抖動而無法進一步收斂,因而會有較大的穩態剩余誤差;反之,采用小步長,算法收斂速度和跟蹤速度慢,但當均衡器抽頭系數接近最優值時,抽頭系數變化范圍較小,因而穩態剩余誤差較小。若將前一次抽頭系數的變化量依次加入到當前抽頭系數的更新中,則前一次抽頭系數的變化項為動量項α,可用于平衡均衡器的抽頭系數的變化量。得到抽頭系數的修正公式:
結合變化的步長因子, ,若變動量因子為,則為變步長變動量因子盲均衡算法(VSVM-CMA),算法中引入了變步長技術與動量項技術,可以提高均衡器的收斂速度,降低均衡器均方誤差抖動程度及剩余誤差。若動量因子α取統計量的形式,則為變步長統計動量因子算法(VSSM-CMA)。
3 算法性能仿真
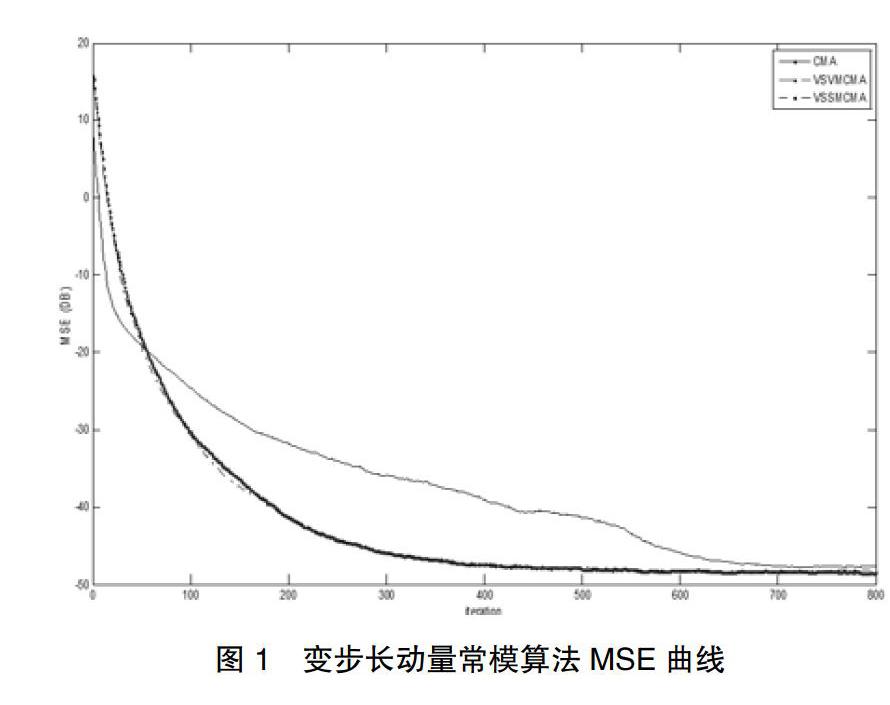
采用4QAM仿真信號,對變步長變動量因子常算法盲均衡算法(VSVM-CMA)和變步長統計動量因子常模盲均衡算法(VSSM-CMA)進行仿真。結果如圖1所示。固定步長CMA均衡算法步長=0.002。;VSVM-CMA中,采用基于箕舌線函數控制的變步長算法,其中=0.002,=30,初始動量因子=0.7,系數=0.999, =0.9;VSSM-CMA中,變步長系數同VSVM-CMA
算法,統計動量因子系數 =0.9。三種算法相比,采用變步長變動量因子常模盲均衡算法(VSVM-CMA)收斂速度最快,且均方誤碼曲線最為平滑,性能最好。經過均衡器以后的輸出信號聚集程度較高,相位偏移量較小,符合通信要求。高噪聲環境中,固定步長常模盲均衡算法的誤碼率較高,變步長統計動量因子常模盲均衡算法的誤碼性能較好,三種算法相比,變步長變動量因子常模盲均衡算法的誤碼性能最好。
變步長變動量因子常模盲均衡算法基于誤差控制和誤差反饋控制技術對常模盲均衡器系數進行修正,提高了通信的準確度,勢必在物聯網無線通信領域具有較好的發展前景。
參考文獻:
[1]International Telecommunication Union UIT.ITU Internet Reports 2005: The Internet of Things[R].2005.
[2]趙麗.淺議物聯網在農業領域的應用及關鍵技術要求[J].電信科學,2011,10(S1):71-74
[3]周新力,張其善.海軍航空工程學院學報.VS-CMA盲均衡算法在短波數據通信中的應用研究,2009,24(02):195-198
[4]Xuefen Ma.Study of Blind Equalization Techniques Based on the Variable Step-size CMA.The 2nd CECNet 2012.2012(04).
項目來源:1、湖北省荊門市引導科研項目,編號:YDKY2016027, 項目名稱:基于物聯網技術的智能農業灌溉系統研究
2、荊楚理工學院科研項目,項目編號:QN201604,項目名稱:電磁感應加熱蒸汽發生器控制系統研究
作者簡介:馬雪芬(1979-),女,碩士,講師,研究方向:通信與信息系統。
猜你喜歡
軟件導刊(2016年9期)2016-11-07 21:56:29
軟件導刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06
