電極修復系統機械結構設計
2017-01-24 09:41:18夏鵬李書環劉源
山東工業技術 2017年1期
關鍵詞:結構設計
夏鵬 李書環 劉源
摘 要:隨著電極使用的頻率越來越大,其誤差也逐漸加大。為使電極恢復其精度,設計了電極修復系統。系統機械結構由兩部分組成,一部分實現電極的上下移動,另一部分實現轉盤的轉動以使轉盤上的容器變換至電極位置,進行電極的清洗或修復,移動和轉動這兩種運動形式互不干涉,從而實現任意時間設置下電極清洗與修復。
關鍵詞:電極修復;結構設計;移動;轉動
DOI:10.16640/j.cnki.37-1222/t.2017.01.251
1 前言
敏感梯度、響應速度、讀數重復性等是電極重要的性能指標,電極的重復使用會導致電極表面發生氧化還原反應或表面退化,從而給測量數據帶來很大誤差,影響測試結果。目前,電極修復即使用某種方法使其能恢復到原樣是解決這一問題的主要方法。
通過對國內外電極修復的研究發現,人們一般采用化學法、物理法或交變電場方法進行修復。比如在電極表面涂上一層物質,以自發愈合電池工作過程中產生的細微裂紋,但這一方案成本較高;有的是簡單地用修復液修復,但卻沒有完成電極清洗這一過程。基于以上分析,提出了電極自動修復系統,其機械結構的設計能夠滿足電極的清洗、修復和測試等過程,以恢復電極的精度,使在實驗時能夠保持統一的基準[1]。
2 電極修復系統結構方案設計
2.1 系統的功能分析
系統應該能在單片機控制下完成三個功能即清洗、修復和復位測試。用于清洗、修復和復位測試的溶液分別裝在三個容器中。這樣,電極需要完成的動作就包括這樣幾部分:(1)進入清洗液容器進行清洗然后移出并轉換至修復液容器位置;(2)進入修復液容器進行修復然后移出并轉換至測試液容器位置;(3)進入測試液容器進行測試然后移出并轉換至清洗液容器位置;如此反復。總結電極的運動可歸納為:水平面內的自由位置變換和豎直平面內的自由位置變換,而且這兩種位置變換互不干涉。這樣,即可達到在單片機控制下的自動電極清洗和修復過程。
2.2 系統的方案分析與設計
運動的形式有兩種,一是移動,一是轉動。位置的變換可通過移動、轉動或者移動與轉動的復合運動來實現。本設計中,水平面內的位置變換通過繞一中心的轉動來實現,即將三個容器分布在同一圓周上;豎直平面內的自由位置變換通過直線移動來實現。由于這兩種運動各自獨立,因此,可將這兩種運動安置于不同的物體上。
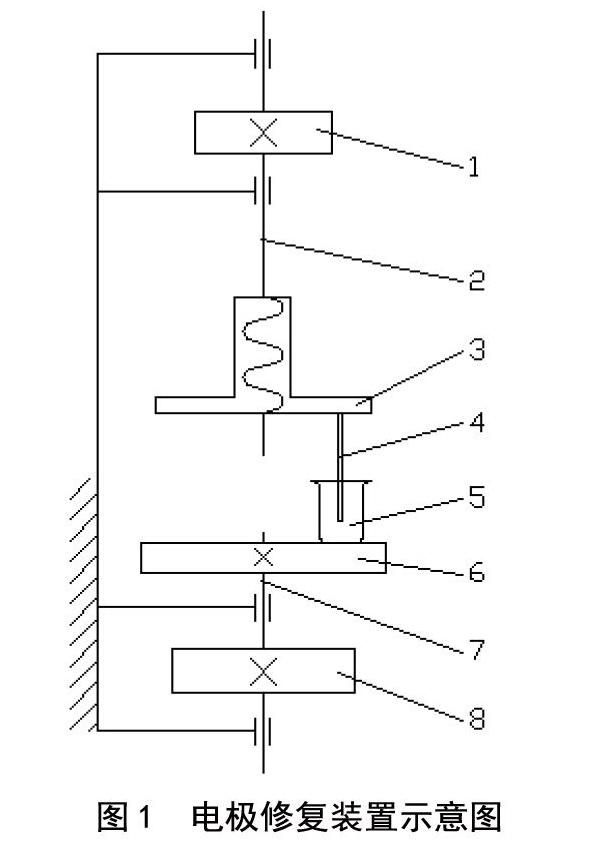
在常用機構中,螺桿傳動不僅能實現電極的移動,而且節省空間,故本設計采用螺桿傳動。轉盤的轉動則有齒輪實現。最終確定的方案如圖1所示[2]。
電機帶動齒輪1轉動,齒輪1與螺桿2固聯,螺桿2轉動,實現螺母3的移動,螺母3上安裝有實驗用的電極4,從而實現電極4的上下移動。螺母下面有轉盤6,上面安裝有三個可拆卸盛裝溶液的容器5,通過另一電機的帶動,可使齒輪8轉動,從而實現與齒輪8同軸的轉盤6轉動。工作時,在單片機控制的電機作用下,電極向下移動進入清洗液容器進行清洗,然后向上移動,退出容器;接著,另一個電機帶動轉盤轉過120°,使修復液容器處于電極下,電極重復向下以及向上的過程,完成修復;轉盤再轉過120°,測試液容器轉至電極下,電極完成測試過程;接著,轉盤再轉過120°,一個循環結束,另一個循環開始。如此反復。
3 機械結構參數設計
按照電極清洗裝置工作要求,電極完成一次向下、向上時間分別為3s,根據電極高度確定的螺母行程為60mm,選擇電機轉速為1500r/m,傳動比為5,傳動螺旋螺距為4mm。如果選擇直流減速電機比如日本TAKANAWA 7字型金屬齒輪直流減速電機,其轉速可控制在160r/m,轉速比較低,可直接使其與螺桿聯接。根據工作要求,轉盤每轉動120°需要2s,齒輪8的取舍也可以根據所選擇電機來定[3]。
4 總結
根據需求對電極修復系統的機械結構進行了設計,該結構由兩部分組成,分別完成電極的上下移動和容器的繞圓周轉動,兩種運動互不干涉,因而可以實現清洗、修復及間隔時間的任意設置,而且設計結構簡單,易于操作,不足的是,結構的相關參數有待在實驗中給予優化。
參考文獻:
[1]周友泉.甘汞參比電極的修復方法[J].臨床檢驗雜志,1994(02):1-2.
[2]李秀珍.機械設計基礎[M].第四版.北京:機械工業出版社,2004:59-256.
[3]邱懷宣.機械設計[M].第四版.北京:高等教育出版社,2002.
作者簡介:夏鵬(1996-),男,安徽蕪湖人,本科在讀,主要從事農業機械方面的學習與研究。
*為通訊作者。
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23
