基于單目立體測量技術的放電銅球間距校準方法
2017-02-06 03:24:18王春雷嚴俊黃正宇陳天樂段艷濤楊波
環境技術 2017年6期
王春雷 ,嚴俊,黃正宇,陳天樂,段艷濤,楊波,3
( 1.海軍駐南京924廠軍事代表室,南京211100;2.電磁環境效應與電光工程國家級重點實驗室,陸軍工程大學,南京 210007;3.國防科技大學氣象海洋學院,南京 211101)
引言
8/20兼容10/350沖擊電流試驗裝置能夠獨立完成針對各種開關型、限壓型或組合型SPD的雷電沖擊殘壓試驗、雷電流耐受試驗和動作負載試驗,是開展雷擊損傷效應研究及雷擊防護方法研究的重要實驗裝置。但實驗裝置長時間的連續高負荷工作,會導致放電銅球之間的間距與系統理論值發生偏差,造成沖擊電流峰值不準確、提前放電等問題,嚴重影響系統整體的可靠性及實驗的有效性。圖1為沖擊電流試驗裝置側視示意圖。
計算機視覺技術是一門新型的學科,其在檢測領域的應用更是獲得了越來也越多的關注[1]。基于計算機視覺技術的檢測技術首先通過圖像傳感器獲取數據,然后通過圖像視覺檢測算法計算檢測空間物體三維坐標進而獲取物體精確幾何尺寸、運動狀態等信息,具有非接觸性、精度高、實時性強等優勢和特點。近幾十年,該技術在多樣化測量方法、檢測精度和模式應用的創新方面都取得了積極進展。逐步研發出了較多的視覺測量應用系統和設備,成為測量領域主流測量手段之一[2]。
單目立體視覺[3]作為視覺測量技術的一種基本形式,具有結構簡單、成本較低、測量范圍大等諸多優點,避免了雙目視覺測量中圖像點立體匹配困難的問題以及每次使用前對兩套成像系統相對位姿的繁瑣標定[4-6],因此更適合于工業現場測量。
本文首次將單目視覺技術與銅球定位相結合,提出了一種新的雷電流試驗裝置銅球間距測量方法。該方法利用一臺工業攝像機對待測銅球區域進行拍攝,對拍攝到的圖像進行分析并提取銅球外邊界,最后利用圖像亞像素分割原理,精細分割出銅球的的上下邊沿,計算出邊沿之間的圖像距離,最后通過標定數據進行三維坐標的轉化,實現銅球間距的實時測量和最終試驗裝置的系統標定。該方法原理簡單、直觀,且定位精度高,能夠很好地解決銅球間距高精度實時標定問題。可為下一步測試系統的自動化設計和建設提供基礎。
1 基于單目立體視覺的雷電沖擊電流試驗裝置銅球間距測量
1.1 系統組成及原理簡介
利基于單目立體視覺測量技術,我們設計了基于雷電沖擊電流試驗裝置銅球間距實時測量系統,以實現對試驗裝置的實時標定,搭建的測試系統如圖2所示。
該測試系統包括一臺焦距25 mm的大恒水星CCD高分辨率攝像機、支撐架、通信數據線及處理機。攝像機與銅球間隙大致具有相同水平高度,距離約3 m。在使用之前,需要對攝像機檢測系統進行標定,計算攝像機的內外參數,方便后面的在線測量。單目攝像機標定是該測試系統使用過程中的重要步驟,對系統的整體測量精度有較大的影響。下面我們著重進行介紹。
1.2 基于HALCON的單目標定與測量
單目視覺測量是以小孔成像原理和透視投影原理等為理論基礎,僅使用一臺攝像機來完成對物體的幾何尺寸、位置、姿態等進行測量的技術[3]。檢測系統的硬件配置比較簡單,一臺攝像機,一個單通道圖像采集卡和一臺計算機。此外,標定過程也比較簡單。程序搭建平臺為機器視覺軟件HALCON[7],該軟件平臺具有較快的形狀匹配速度,有較全面的算子工具集合,且標定手段比較簡單。
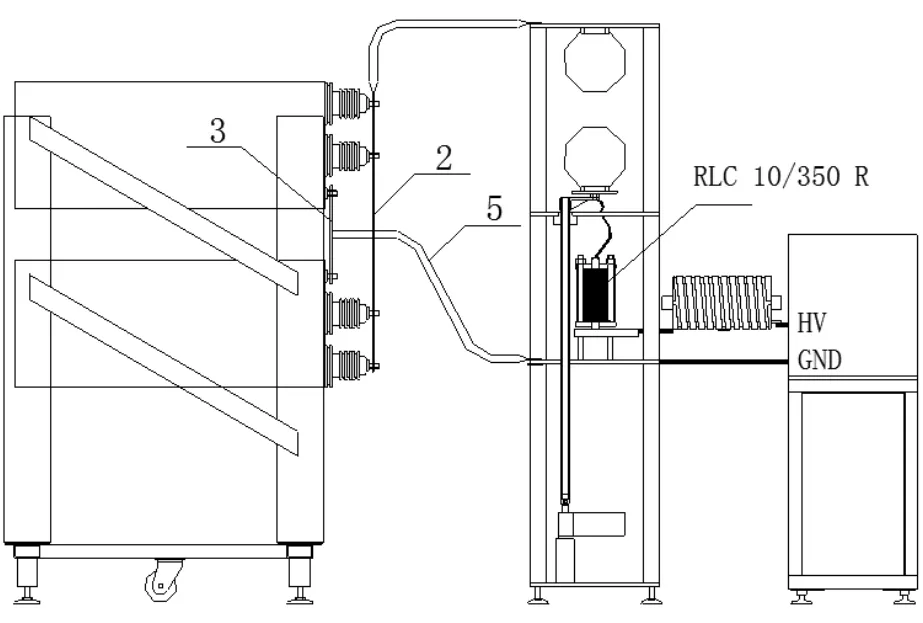
圖1 沖擊電流試驗裝置側視示意圖

圖2 基于單目的沖擊電流試驗裝置標定系統
HALCON 是德國 MVTec Software GmbH 公司開發的一套完善的機器視覺算法包,內含眾多的圖像處理算子和交互式的開發工具。開發算子具有較單一的功能,從簡單的讀取圖像到復雜的 Kalman 濾波等,但正是這些單一功能的算子,像一個一個積木一樣,最終能堆積成功能強大的的應用設計。該軟件提供的集成開發環境HDevelop 為編程者提供了一個可視化的圖像界面,可以使用戶在程序調試中,通過參數窗口監測到數據變量和圖像變量的變化,進而高效的進行程序開發。
在單目視覺技術測量方面,HALCON提供了比較全面的標定助手工具和測試示例,可快速地進行在線視覺系統開發與集成。因此,本文選取它作為視覺測量系統開發的軟件平臺。
一般情來說,在進行立體視覺測量之前首先需要進行相機的標定[8-10],得到攝像機的內參數(攝像機固有參數)和外參數(相對位姿),然后在運用相機的標定參數進行在線的測量。而后期的在線測量,實際是將測量所得的圖像坐標系數據轉化到實際三維空間數據的過程。而此時的相機的標定對最終的測試結果的精度的影響時十分關鍵的。
相機的標定可以借助標準標定物和標定算法來開發實現。本文采用標準的100 mm - 49 黑色圓點HALCON標定板,如圖 4所示。首先,讀取圖像并對圖像進行平滑,然后,利用閾值分割算法提取標定區域,再提取各圓形標記點的邊緣,計算出各標記點的中心坐標,確定標定點與圖像投影間的對應關系,最終得到相機的內外參數。
通過標定后的單目相機,相對位置不變的情況下,能實現標定板范圍內的在線測量。由于本系統需要測量的銅球之間的間距范圍不大,間距變化范圍一般為0-50 mm,在圖像視場范圍內變化較小,因此,單目測量技術是能滿足要求的,精度也是有保障的。最終,通過單目的測量,銅球間距能夠實時地傳輸到處理機終端上,方便遠距離在線標定與調試。
1.3 銅球間距測量與標定過程
下面介紹基于單目單目視覺的銅球距離整體測量流程。
首先,靜態預先標定。將攝像機固定在距離銅球大約3 m的支撐架上,利用標定板進行像機標定,將標定板放置在銅球附近并微調不同姿態,同時對焦使得標定板圖像最清晰,以提高邊沿輪廓提取的精度。利用HALCON中的標定助手(如圖5所示)先后采集共15張圖片進行標定。
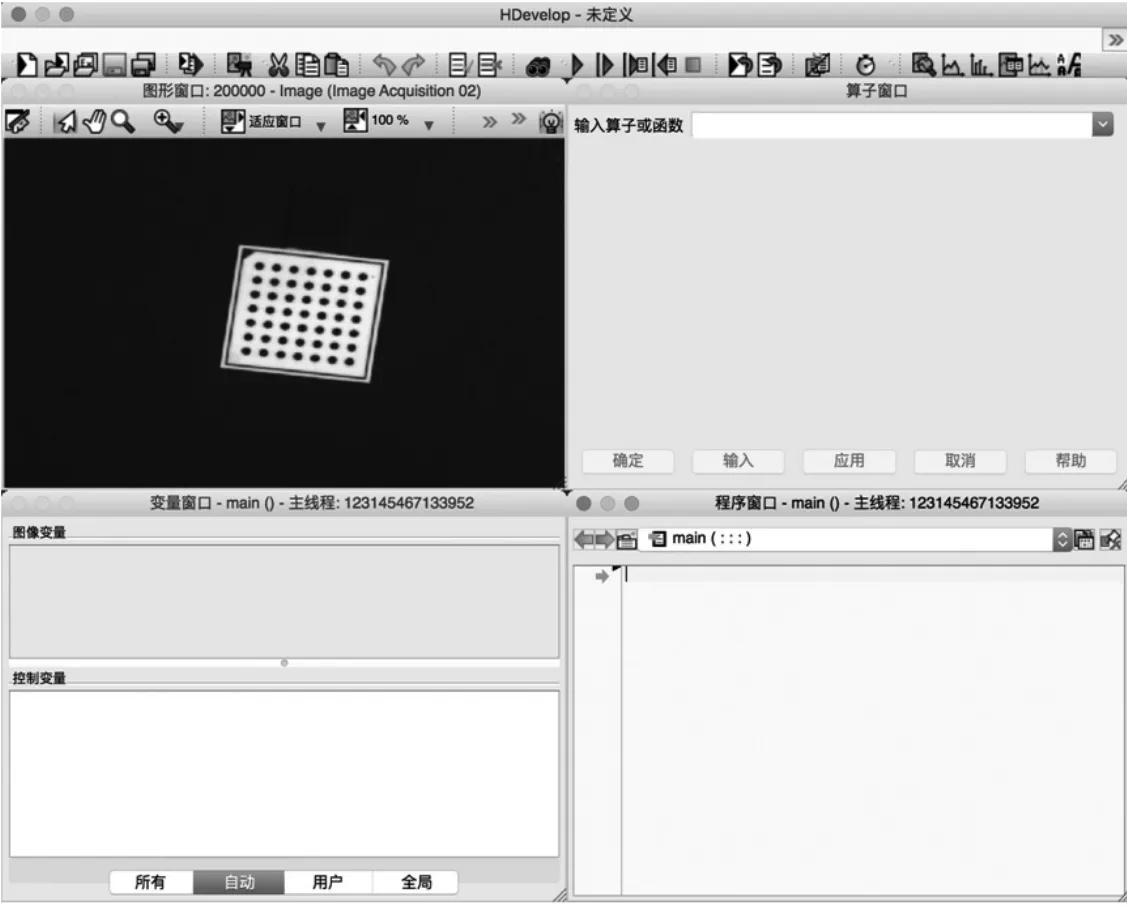
圖3 HALCON開發界面
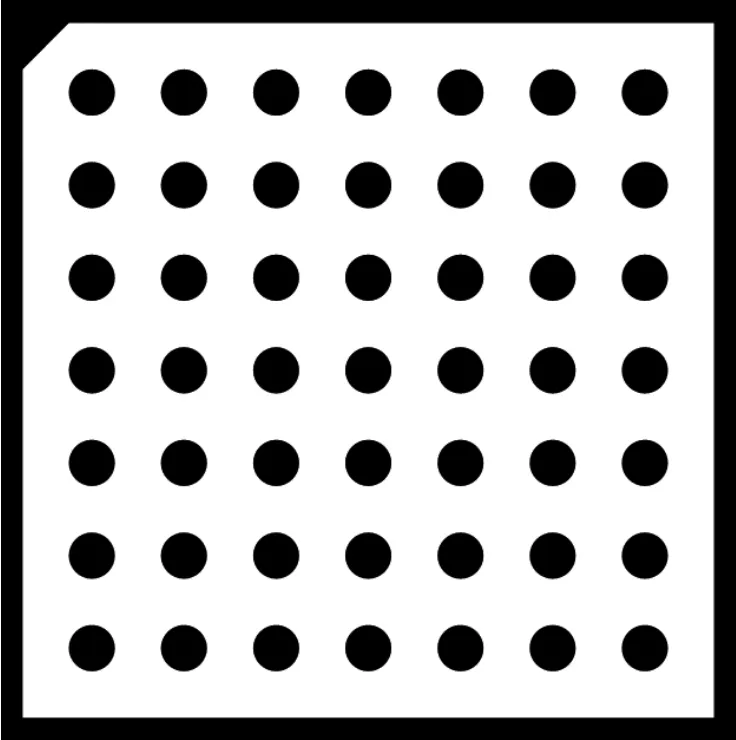
圖4 基于HALCON的單目視覺標定板
其次,實時在線測量。在開展帶負載實驗過程中,對銅球間距進行在線測量與實時校正。本文選用CFRP的雷擊致損實驗進行在線測量。實驗時,先對銅球區域進行連續拍攝,每拍攝一幀進行一次在線測量。最后,將測量結果實時傳輸到處理機進行顯示,方便操作人員及時查看和校準。銅球測量的關鍵一步為如何準確提取上下銅球的邊沿,即如圖6所示的測量線的提取。由于測量過程中攝像機位置和銅球位置不發生明顯的變化,因此,在測量時先要劃定如圖6所示的長條形的測量區域。然后在這個區域進行雙線性插值,之后再計算出灰度值輪廓。再通過計算灰度值輪廓一階導數的局部極值得到一維邊界,然后對邊緣進行自動配對。最后將配對的兩點的距離進行基于標定參數的實際三維空間坐標的變換,得到真實的測量距離。
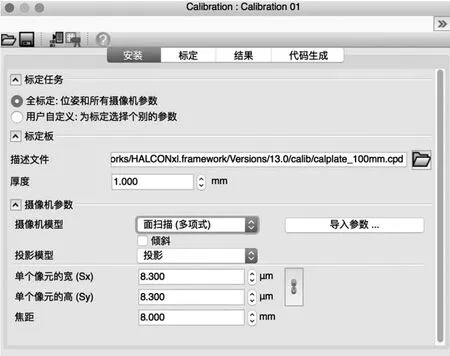
圖5 HALCON標定助手界面
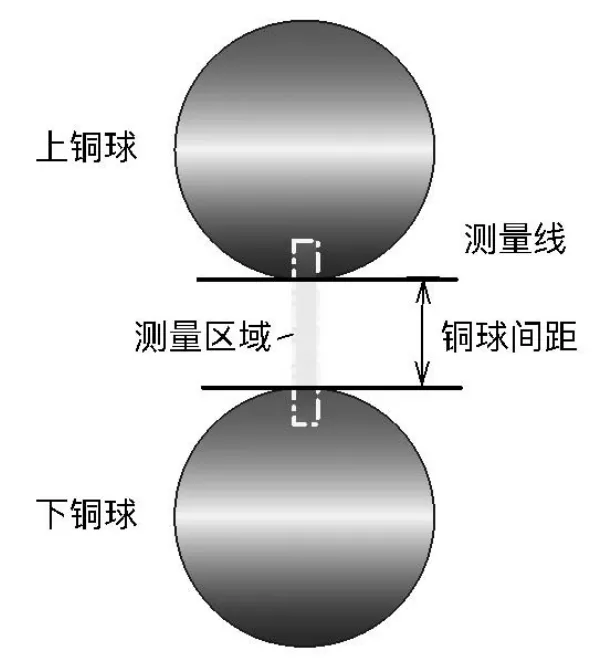
圖6 銅球間距測量示意圖
圖7為某一次測量結果。可以發現,測量界面同時給出了兩根綠色的短線,這各自代表了銅球的兩個邊沿,并且測量數據也在短線旁邊實時顯示。
最后,結果顯示和誤差分析。為了驗證本文基于單目視覺的沖擊電流裝置標定系統的精度及有效性,我們在銅球之間放置了20 mm的標準物件,然后控制好銅球間距,將多次測量結果與之對比。測量結果如表1所示。
通過5次的測量和對比發現,每次測量的結果和標準值之間的誤差均控制在1 mm內,最終的平均誤差僅為-0.033。這一精度滿足測試系統的整體測試要求。
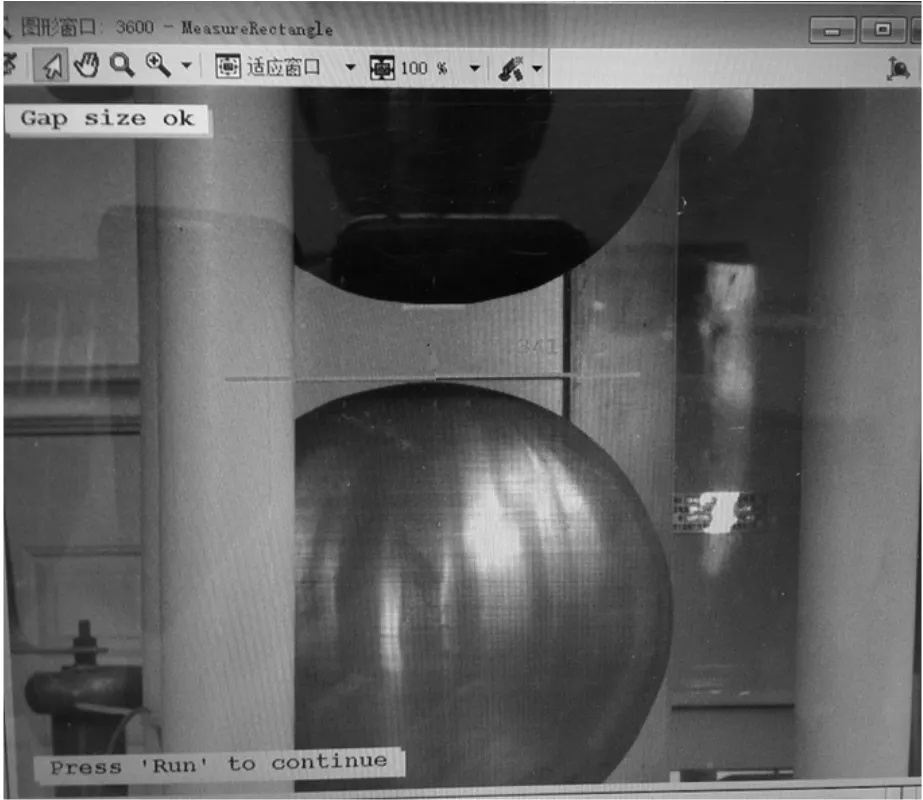
圖7 測量界面和結果(37.341 mm)

表1 測量誤差分析 單位:mm
2 結論
本文研究了一種基于單目視覺技術的雷電沖擊電流放電裝置銅球間距測試方法,并搭建了整個測試系統。通過將基于HALCON的單目視覺測量技術與沖擊電流放電裝置間距標定需求相結合,開發并實現了快速、準確地間距在線測量和傳輸。此外,整個測試系統搭建簡單、操作簡易,非常適合于下一步的試驗裝置系統的自動化集成。這也為電磁兼容領域實現測試自動化提供了新的借鑒和參考。
[1]張廣軍.視覺測量[M].北京:科學出版社,2008.
[2]賈乃斌.基于計算機視覺的汽車整車尺寸測量系統的研究[D].吉林:吉林大學, 2007.
[3]張春波.單目高精度標記點三維數字化測量原理研究[D].天津:天津工業大學, 2011.
[4]高宏偉.計算機雙目立體視覺[M].北京:電子工業出版社,2012,06.
[5]李迎燕.基于雙目視覺的河道測量技術研究[D].沈陽:東北大學,2009.
[6]張少輝 , 沈曉蓉,范耀祖,等 . 一種基于圖像特征點提取及匹配的方法 [J]. 北京航空航天大學學報.2008,34(5):516-519.
[7]李哲,項輝宇,韓寶安,等.基于 HALCON 的雙目視覺系統標定[J].機電產品開發與創新,2013(3):95-97.
[8]Meng X Q, L H,Hu Z Y.A new camera technique for camera calibration[J].IEEE Transaction on Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
[9]楊雪榮,張湘偉等.視覺測量中的相機標定方法進展研究[J].機械設計與制造,2009(3):259-261.
[10]毛亮 , 薛月菊 . 基于 Moore-Penrose 廣義逆修正三的攝像機標定方法 [J]. 計算機工程與應用,2011(20):194-196+248.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45