一種自動翻轉吊卡的研制
2017-02-09 06:24:44江連會周斌譚躍剛黃安貽王雄王龍渤
石油鉆采工藝 2017年6期
關鍵詞:作業
江連會 周斌 譚躍剛 黃安貽 王雄 王龍渤
1.武漢理工大學機電工程學院;2.荊州市明德科技有限公司;3.中國石化石油工程機械有限公司研究院;4.渤海鉆探工程有限公司管具技術服務分公司
隨著我國多數油田都已進入了原油開采的中、后期階段,修井作業也隨之越來越繁重。為降低工人的勞動強度,增加操作安全性,修井作業自動化研究成為目前研究的熱點[1-3]。起下管柱作業是修井作業中最常見的作業形式,吊卡是起下作業中最關鍵的裝置之一。目前修井作業吊卡的操作主要還是以人工為主,工人勞動強度高、安全性低。自動吊卡可以降低工人的勞動強度,增加操作安全性,成為了國內外研究開發的重點。目前國內外自動吊卡主要是液壓翻轉式吊卡[4-9]。根據我國修井作業裝備情況,為節省成本,在手動吊卡基礎上,研制了氣壓翻轉式自動吊卡。
1 自動吊卡結構和參數
Structure and parameters of automatic elevator
1.1 結構
Structure
自動吊卡主要由吊卡體、活頁、翻轉機構、活頁開關機構、上鎖舌開關機構和下鎖舌開關機構等組成,結構如圖1所示。活頁開關機構用于推動活頁關閉和打開,實現油管的卡住和釋放。上鎖舌開關機構和下鎖舌開關機構實現活頁與吊卡的鎖死和解鎖,保證起吊油管的安全性。翻轉機構實現吊卡的翻轉,方便吊卡卡住油管。支架用于保護和支撐上述機構。
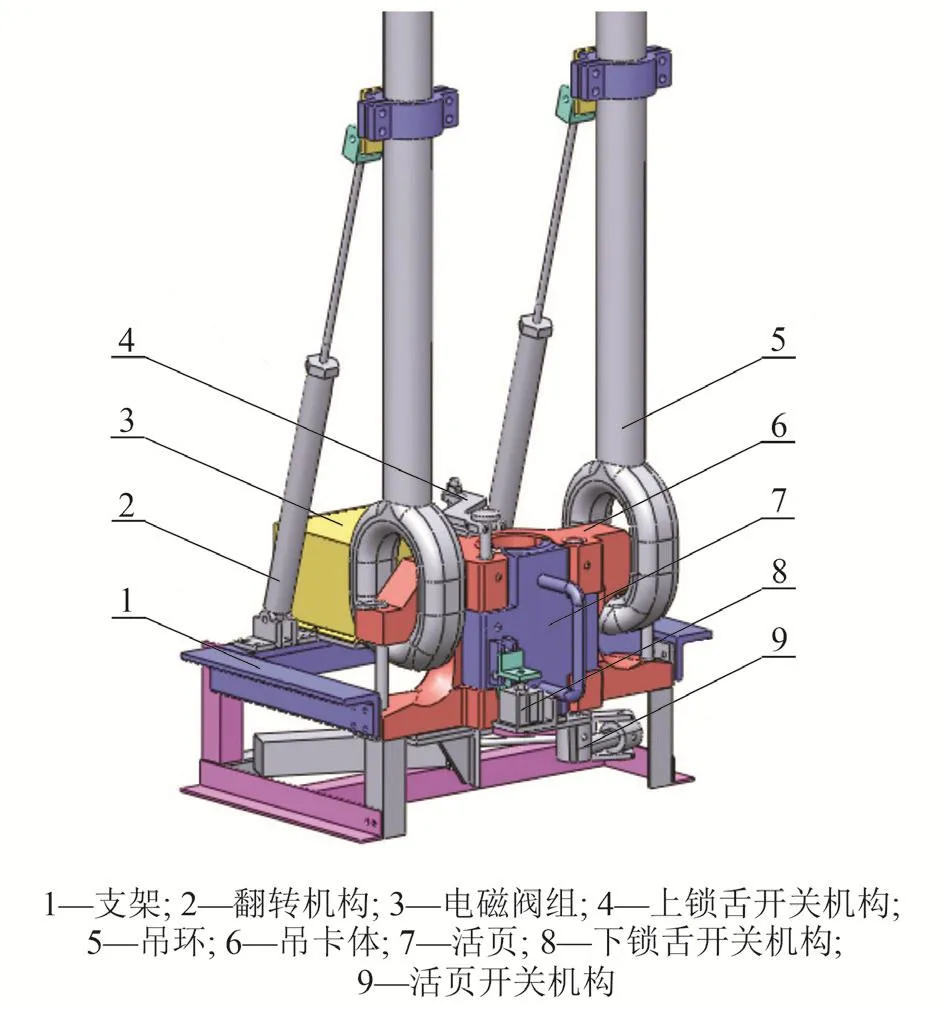
圖1 自動吊卡結構示意圖Fig. 1 Schematic structure of automatic elevator
1.2 主要設計參數
Main design parameters
自動吊卡的重量為77.5 kg,自動吊卡在圖1位置時的長寬高為660 mm×482 mm×1 180 mm,活頁最大旋轉角度為100°,吊卡最大翻轉角度為75°,額定載荷為4 000 kN,適用油管外徑73.02 mm。
2 翻轉機構
Turnover mechanism
翻轉機構是自動吊卡最主要的部件之一。當自動吊卡處于如圖1所示的垂直位置時,翻轉機構運動簡圖如圖2所示。在圖1位置時,翻轉機構的長寬高為660 mm×482 mm×950 mm。氣缸收縮時,帶動吊卡體翻轉;氣缸伸長時,帶動吊卡體返回,最終到垂直位置。根據自動吊卡的幾何空間布局,D、C點的位置是確定的,A點豎直方向的位置也是確定的,A點水平方向的位置可在一定范圍內變動,優化A點水平方向的位置讓翻轉機構的性能達到最優。

圖2 翻轉機構運動簡圖Fig. 2 Schematic movement of turnover mechanism
吊卡翻轉的目的是順利抓取從貓道等拉排管裝置送上的油管。在不同修井工況下,貓道等拉排管裝置送上油管的傾斜角度(油管與水平面的夾角)范圍一般為5~35°。當吊卡軸線與油管軸線平行且吊卡與油管貼合時,關閉吊卡活頁可以順利實現油管的抓取。由于貓道等拉排管裝置送來的油管傾斜角度不同,抓取油管時,調整吊卡軸線傾斜角度與油管軸線傾斜角度一致的方法有兩種。(1)通過檢測和控制系統調整吊卡的翻轉角度與油管的傾斜角度一致,這樣做對控制系統的要求高,相應的成本比手動吊卡也會增加很多。(2)根據觀察,井口操作人員在翻轉吊卡時,并沒有和貓道等拉排管裝置送上來的油管的傾斜角度完全一致,吊卡在重力的作用下自動和油管吻合,利用這一現象,根據貓道等拉排管裝置送上的油管傾斜角度的范圍,我們把吊卡的翻轉角度定為75°,當吊卡的前部和油管接觸后,釋放翻轉機構,吊卡在重力的作用下,完全和油管吻合,從而可以實現油管的抓取,這樣做既可以實現油管的抓取,控制系統也較簡單,相比手動吊卡成本增加不大。通過比較,選擇第2種方式實現油管的抓取。
3 翻轉機構運動學與動力學仿真
Kinematics and dynamics simulation of turnover mechanism
利用CAD軟件建立自動吊卡的虛擬設計模型,如圖1所示,然后把該模型導入到ADMAS軟件中,將摩擦系數設置為0.3,氣缸的拉力和推力設置為994 N,分別對A點在水平方向的五個位置對翻轉機構進行運動學和動力學仿真分析。

圖3 氣缸收縮距離與吊卡翻轉角度關系曲線Fig. 3 Relationship between the shrinkage distance of cylinder and the turnover angle of elevator
圖3為A點在水平方向不同位置時,氣缸收縮距離和吊卡翻轉角度的關系曲線。水平位置1時(如圖中曲線1所示),初始條件下,氣缸最大收縮250 mm,對應吊卡的最大翻轉角度為60°,達不到最大翻轉角度為75°的要求。位置2~5都可以達到吊卡翻轉75°的要求。位置2吊卡的最大翻轉角度為77°左右,考慮擾動的影響,也予以排除,位置3~5都能夠實現吊卡穩定翻轉75°的要求。
圖4為吊卡翻轉角度、角速度和角加速度曲線圖。從圖中曲線可以看出,位置3(對應圖中曲線3)的翻轉速度較快,翻轉較穩定。因此確定位置3(如圖2)為A點的最終水平位置。位置3的最大翻轉角度為82.2°,在0.21秒時達到最大翻轉角度,氣缸收縮的距離為299.9 mm。
4 實驗
Experiment
依據優化結果,設計制作了自動吊卡裝置。在994N氣缸力的作用下,吊卡最大翻轉角度為79.6°,在0.22秒時達到最大翻轉角度,最大翻轉角度時,氣缸收縮的距離為295.6 mm。吊卡最大翻轉角度誤差為3.16%,仿真結果與實驗結果誤差較小,在允許范圍內。
在現場環境進行了實驗:翻轉機構翻轉平穩、快速;吊卡門開關機構開閉穩定、迅速;可以順利抓取與水平面夾角為0°~50°、直徑為73.02系列的油管;鎖舍啟閉靈活,保證了吊卡的安全。操作人員遠離吊卡遙控操作,保證了操作人員的安全。實驗數月,運行一直平穩。
5 結論
Conclusions
在手動吊卡的基礎上,加裝自動執行機構,實現了手動吊卡到自動吊卡的升級。應用Admas軟件,對自動吊卡的翻轉機構進行了優化設計。依據優化結果,制作了自動吊卡裝置,并進行了翻轉實驗,仿真結果與實驗結果非常接近。應用Admas軟件對設計模型進行仿真并優化,可以減少實驗裝置的制作,節約成本。

圖4 吊卡翻轉運動學曲線Fig. 4 Kinematics curve of the turnover of elevator
[1]耿玉廣,谷全福,王樹義,曾良軍,孫連會,李寶軍. 修井作業井口無人操作起下油管裝置[J]. 石油鉆采工藝,2014,36(6):116-121.
GENG Yuguang, GU Quanfu, WANG Shuyi, ZENG Liangjun, SUN Lianhui, LI Baojun. A device of pulling and running tubing string for workover with unmanned wellhead operation[J]. Oil Drilling & Production Technology, 2014, 36(6): 116-121.
[2]高廣啟. 升降式油管枕的研制與應用[J]. 石油鉆采工藝,2014,36(6):122-124.GAO Guangqi. Development and application of jack-up tubing stand[J]. Oil Drilling & Production Technology,2014, 36(6): 122-124.
[3]中國石油天然氣股份有限公司. 起下油管井口無人操作系統的推拉機械手:中國,201120558063. 0 [P].2012-08-15.
PetroChina Company Limited. Push-and-pull machine hand for pulling and running tubing string of workover with unmanned wellhead operation: China, 201120558063. 0[P]. 2012-08-15.
[4]高勝,孫冠,常玉連,任福深,陳玉. 動力開合吊卡的平衡分析與研究[J]. 石油機械,2011,39(6): 29-32.
GAO Sheng, SUN Guan, CHANG Yulian, REN Fushen,CHEN Yu. Balance analysis and research for power elevator[J] . China Petroleum Machinery, 2011, 39(6):29-32.
[5]孫冠. 動力吊卡設計與運動仿真[D]. 大慶:東北石油大學,2011:4-8.
SUN Guan. Design and motion simulation of power elevator[D]. Daqing: Northeast Petroleum University,2011: 4-8.
[6]魏凱. 新型筒式自動吊卡設計及理論分析[D]. 大慶:東北石油大學,2012: 6-9.WEN Kai. New cylinder automatic elevator design and theoretical analysis [D]. Daqing: Northeast Petroleum University, 2012: 6-9.
[7]何鴻,閆永宏,王德貴,祝賀. 液壓自動吊卡技術現狀及發展建議[J]. 石油機械,2012,40(8):29-34.
HE Hong, YAN Yonghong, WANG Degui, ZHU He.Current situation of the hydraulic automatic elevator thechnology and suggestions on development [J]. China Petroleum Machinery, 2012, 40(8): 29-34.
[8]祝賀,欒蘇,楊艷,閻永宏,董毅軍,王德貴. 液壓翻轉式吊卡的研制[J]. 石油機械,2014,42(11):35-37.
ZHU He, LUAN Su, YANG Yan, YAN Yonghong, DONG Yijun, WANG Degui. Development of the hydraulic rotary elevator [J]. China Petroleum Machinery, 2014, 42(11):35-37.
[9]山東勝利石油裝備產業技術研究院. 一種全自動吊卡:中國,201510363529. 4 [P]. 2015-09-23.
Shandong shengli petroleum equipment industry technology research institute. A kind of automatic elevator: China, 201510363529. 4 [P]. 2015-09-23.
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
