國(guó)產(chǎn)機(jī)載LiDAR平面精度檢查新方法
2017-02-27 02:44:01邢吉昌李志杰
浙江農(nóng)業(yè)科學(xué) 2017年2期
關(guān)鍵詞:標(biāo)的
邢吉昌,施 昆*,李志杰
(1.昆明理工大學(xué) 國(guó)土資源工程學(xué)院,云南 昆明 650093; 2.北京四維遠(yuǎn)見信息技術(shù)有限公司,北京 100039)
國(guó)產(chǎn)機(jī)載LiDAR平面精度檢查新方法
邢吉昌1,施 昆1*,李志杰2
(1.昆明理工大學(xué) 國(guó)土資源工程學(xué)院,云南 昆明 650093; 2.北京四維遠(yuǎn)見信息技術(shù)有限公司,北京 100039)
針對(duì)國(guó)產(chǎn)LiDAR點(diǎn)云精度相對(duì)較差,平面精度難以評(píng)價(jià),圓形地標(biāo)面積較大,攜帶不便且成本高推廣困難,十字形地標(biāo)在尺寸不夠大時(shí),實(shí)際中心與點(diǎn)云擬合中心重合性不好、精度較差的現(xiàn)狀,從國(guó)產(chǎn)機(jī)載LiDAR的平面精度檢校與實(shí)際應(yīng)用出發(fā),提出一種基于角錐形狀地標(biāo)的機(jī)載LiDAR平面精度檢查方法,綜合利用飛行向與掃描向的點(diǎn)云,所使用的地標(biāo)尺寸相對(duì)較小,攜帶方便且便于推廣。筆者利用該地標(biāo)進(jìn)行野外實(shí)地飛行試驗(yàn)證明,本文提出的方法可有效對(duì)LiDAR點(diǎn)云的水平精度進(jìn)行驗(yàn)證,具有一定的實(shí)用價(jià)值。
國(guó)產(chǎn)LiDAR; 角錐地標(biāo); 點(diǎn)云; 平面精度
機(jī)載激光雷達(dá)(LiDAR,Light Detection And Ranging)融合了三維激光掃描系統(tǒng)、全球定位系統(tǒng)和慣性導(dǎo)航系統(tǒng),是一種可直接快速獲取地面及地面目標(biāo)三維空間信息的新型主動(dòng)型航空對(duì)地觀測(cè)傳感器[1]。近幾年,隨著社會(huì)需求的不斷擴(kuò)大與相關(guān)技術(shù)的發(fā)展,機(jī)載激光雷達(dá)技術(shù)的發(fā)展日新月異,在測(cè)繪、災(zāi)害監(jiān)測(cè)、森林調(diào)查、資源監(jiān)測(cè)和軍事等方面的用處越來(lái)越廣泛。
一般來(lái)說(shuō),LiDAR點(diǎn)云數(shù)據(jù)的誤差分為絕對(duì)誤差和相對(duì)誤差。相對(duì)誤差指LiDAR點(diǎn)云不同航帶間的相對(duì)偏差,一般可通過(guò)航帶平差或剖面手工檢校進(jìn)行誤差評(píng)定和消除[2-3]。絕對(duì)誤差指激光點(diǎn)坐標(biāo)與反射相應(yīng)激光點(diǎn)的實(shí)際地物的坐標(biāo)之間的差距,一般可以利用含有地面控制點(diǎn)和無(wú)地面控制點(diǎn)的方式進(jìn)行精度評(píng)定[4-5]。目前,機(jī)載LiDAR的常用掃描方式雖然分為Z字形線掃描、圓錐掃描和纖維光學(xué)陣列掃描3種[6]規(guī)則掃描方式,但由于飛行速度、風(fēng)速與飛行姿態(tài)的影響,點(diǎn)云的密度并不是特別均勻,外加激光點(diǎn)無(wú)法定點(diǎn)投射,難以在LiDAR點(diǎn)云中選取像高分辨率影像那樣精確選取影像特征點(diǎn)作為連接點(diǎn)或控制點(diǎn),故而LiDAR點(diǎn)云的絕對(duì)誤差需要通過(guò)點(diǎn)云擬合地表面后再與布設(shè)的檢查點(diǎn)比較評(píng)判[7-8]。就目前來(lái)說(shuō),LiDAR點(diǎn)云的高程精度評(píng)定相對(duì)簡(jiǎn)單,而水平精度的評(píng)定則需要設(shè)計(jì)特殊的地標(biāo)。美國(guó)人Csanyi和Toth設(shè)計(jì)了一種圓形地標(biāo)[9](圖1),通過(guò)測(cè)量圓形地標(biāo)的實(shí)際中心點(diǎn)與落在圓形地標(biāo)上的激光點(diǎn)的擬合中心點(diǎn)的距離,來(lái)檢查點(diǎn)云的平面精度。
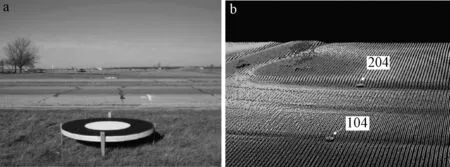
圖1 圓形地標(biāo)(a)及其在點(diǎn)云中的位置(b)
由于點(diǎn)云并不均勻,故此方法的實(shí)施需要有足夠多的點(diǎn)落在圓形地標(biāo)上,當(dāng)點(diǎn)間距一定時(shí),由于擬合精度的需要,就需要地標(biāo)足夠大。同樣,馬洪超等[10]設(shè)計(jì)的十字形地標(biāo)(圖2),當(dāng)?shù)貥?biāo)不是足夠大,且機(jī)載LiDAR的掃描方式為Z字形線掃描與纖維光學(xué)陣列掃描時(shí),點(diǎn)云在地標(biāo)上的所擬合的兩條直線交點(diǎn)不嚴(yán)格與實(shí)際的地標(biāo)中心點(diǎn)不重合(圖3)。相比國(guó)外先進(jìn)儀器,國(guó)產(chǎn)LiDAR點(diǎn)云的精度稍低,更加劇了這一情況。故無(wú)論是圓形地標(biāo)還是十字形地標(biāo),方法實(shí)現(xiàn)的前提都是有足夠的點(diǎn)云落到地標(biāo)上,也就是需要地標(biāo)足夠大,而十幾米長(zhǎng)的地標(biāo)不僅攜帶不便,且無(wú)形中增加了成本。

圖2 十字形地標(biāo)(a)及其在點(diǎn)云中的位置(b)

圖3 擬合直線交點(diǎn)與實(shí)測(cè)中心不重合
基于以上討論,本文根據(jù)國(guó)產(chǎn)LiDAR的實(shí)際特點(diǎn),從機(jī)載LiDAR點(diǎn)云的掃描方式和具體工程出發(fā),設(shè)計(jì)了一種基于角錐形(金字塔形)地標(biāo)的點(diǎn)云平面精度檢查方法,并最終在河南某地進(jìn)行野外試驗(yàn),以驗(yàn)證此方法的實(shí)際效果。
1 基于角錐形狀地標(biāo)的平面精度檢查
本文角錐形(金字塔形)地標(biāo)(圖4),利用4個(gè)面上的點(diǎn)擬合出4個(gè)平面,并求出4個(gè)面的交點(diǎn),然后和角錐形地標(biāo)的4個(gè)實(shí)測(cè)邊角點(diǎn)的解求中心點(diǎn)進(jìn)行對(duì)比,以評(píng)價(jià)LiDAR點(diǎn)云的平面精度。
圖4 角錐形地標(biāo)示意圖
1.1 角錐形地面標(biāo)志的設(shè)計(jì)
試驗(yàn)設(shè)備為國(guó)產(chǎn)LiDAR設(shè)備LC-3500(圖5),為了綜合使用飛行向與掃描向的點(diǎn)云,預(yù)先設(shè)計(jì)好飛行在試驗(yàn)場(chǎng)的相對(duì)飛行高度為500~600 m,激光發(fā)射頻率130 kHz,電機(jī)轉(zhuǎn)速1 000 r·min-1,飛行速度100~130 km·h-1,設(shè)飛行向點(diǎn)云間隔為D1,單位為m,根據(jù)點(diǎn)云間距計(jì)算公式:
其中,v為飛行器前進(jìn)速度(m·s-1),γ為電機(jī)轉(zhuǎn)速(轉(zhuǎn)·s-1)。

圖5 國(guó)產(chǎn)LiDAR設(shè)備LC-3500
設(shè)掃描向點(diǎn)云間隔為D2,單位為m,則
其中,f為激光發(fā)射頻率,H為相對(duì)航高。
從表1可以看出,飛行高度500m、飛行速度100km·h-1的1組參數(shù)中,掃描向間距與飛行向間距較為接近,便于試驗(yàn),故采取該組參數(shù)進(jìn)行飛行試驗(yàn)。
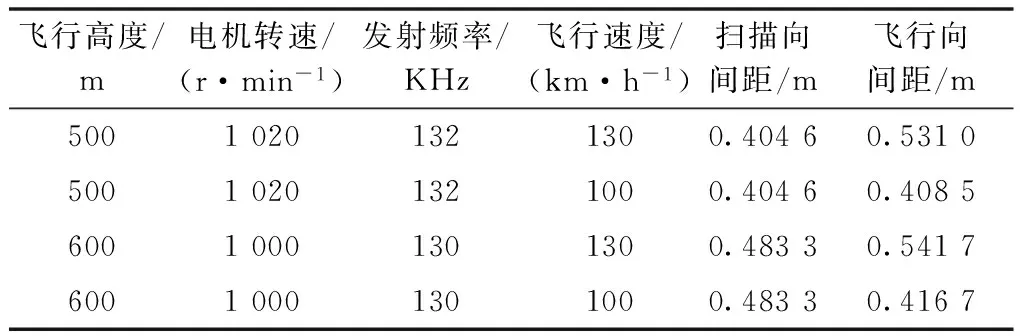
表1 激光雷達(dá)點(diǎn)云間隔計(jì)算
當(dāng)飛行高度為500 m,飛行速度為100 km·h-1時(shí),激光點(diǎn)云間隔0.4~0.5 m,按激光點(diǎn)云地面間隔0.5 m,每塊三角板在地面投影的長(zhǎng)度應(yīng)為3倍激光點(diǎn)云間隔,即1.5 m。圖6為地面靶標(biāo)單塊三角板在地面投影與激光點(diǎn)云關(guān)系示意圖。
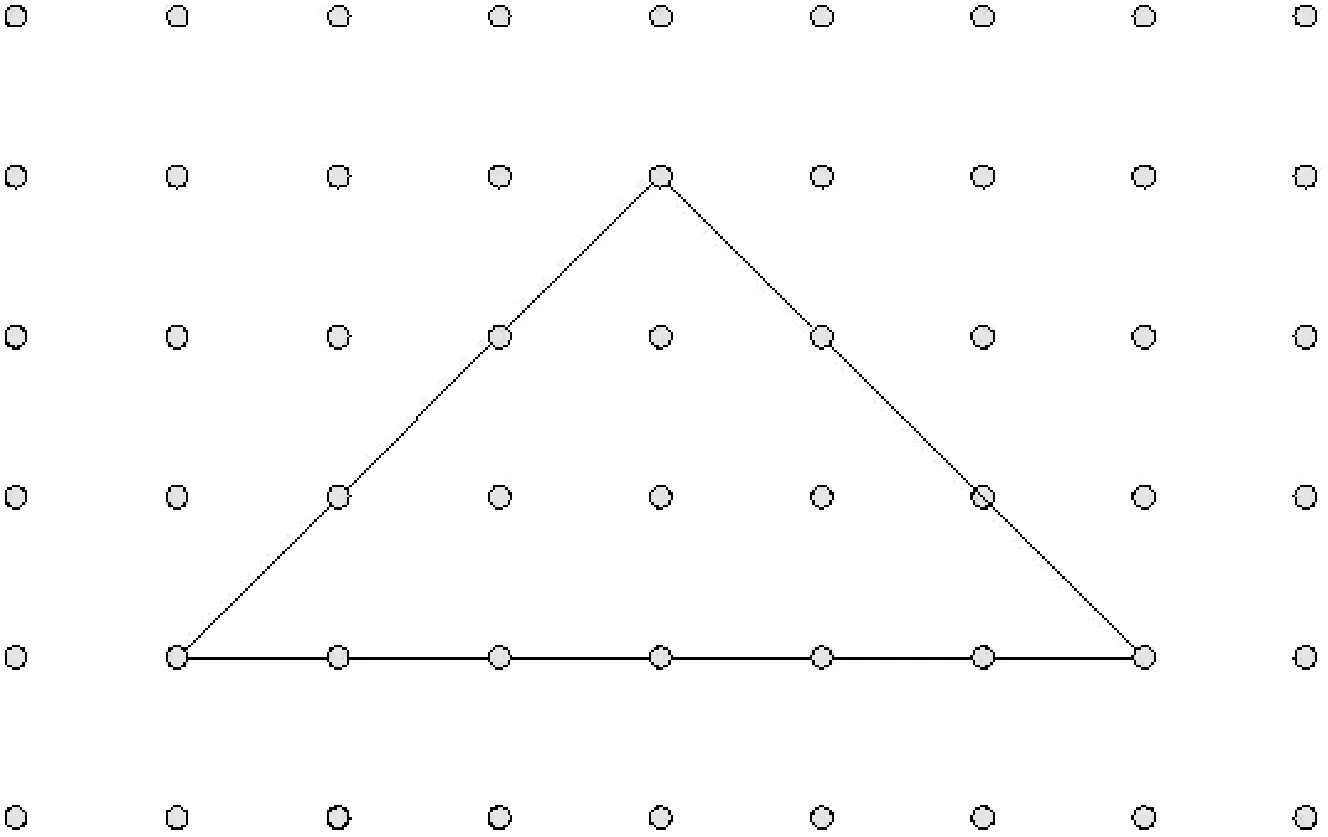
圖6 單個(gè)三角板地面投影與激光點(diǎn)云關(guān)系
地標(biāo)單塊三角板在地面投影長(zhǎng)度1.5 m,相向2塊三角板高度在地面投影長(zhǎng)度3.0 m,所以靶標(biāo)的平面尺寸為3.0 m×3.0 m。考慮到激光光斑落在靶標(biāo)上的能量回收,三角板高度設(shè)計(jì)為1.8 m(圖7),則三角板與地面的夾角成30°,既保證了激光能量的有效回收,又兼顧靶標(biāo)上的激光點(diǎn)云高于周圍地面的激光點(diǎn)云,利于靶標(biāo)的識(shí)別和點(diǎn)云提取。同時(shí),為了利用點(diǎn)云強(qiáng)度將地標(biāo)與周圍地面區(qū)分開來(lái),將制作角錐形地標(biāo)的木板表面涂上一層黑漆(圖8)。
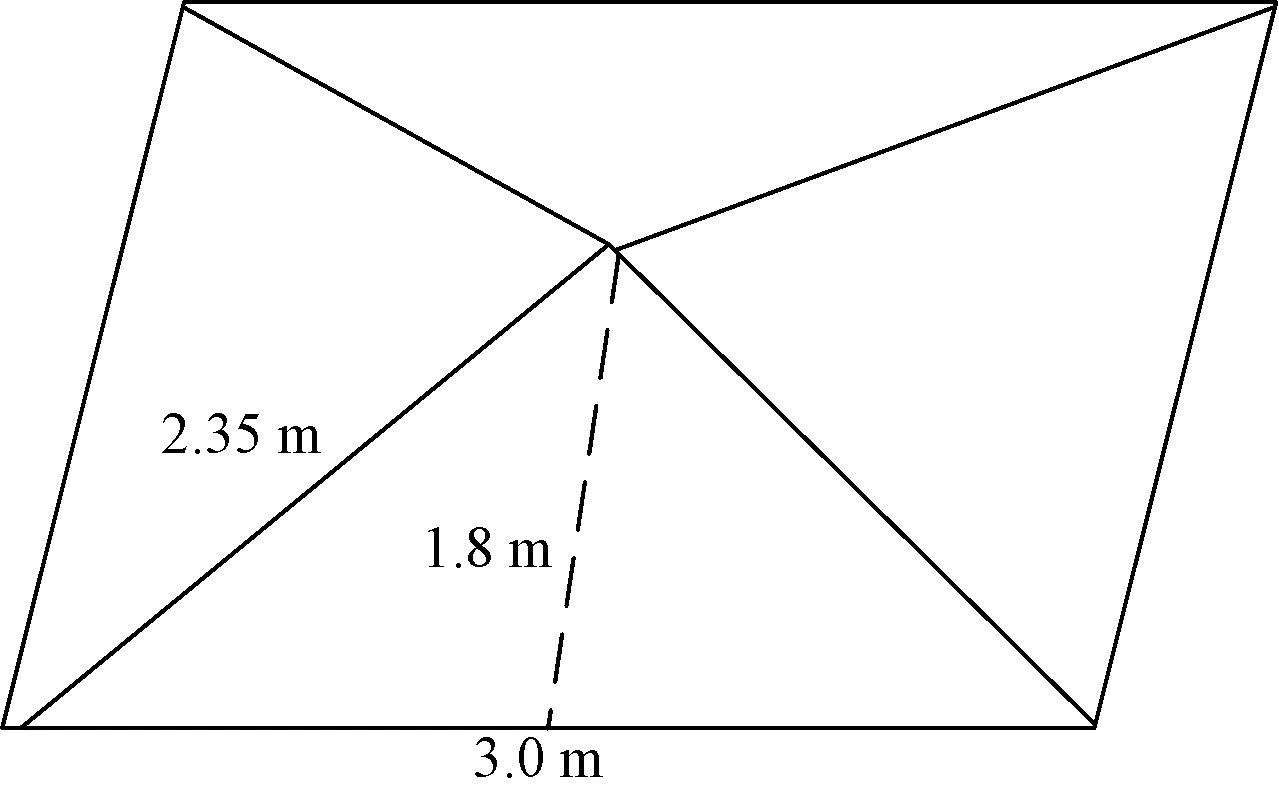
圖7 靶標(biāo)尺寸示意圖
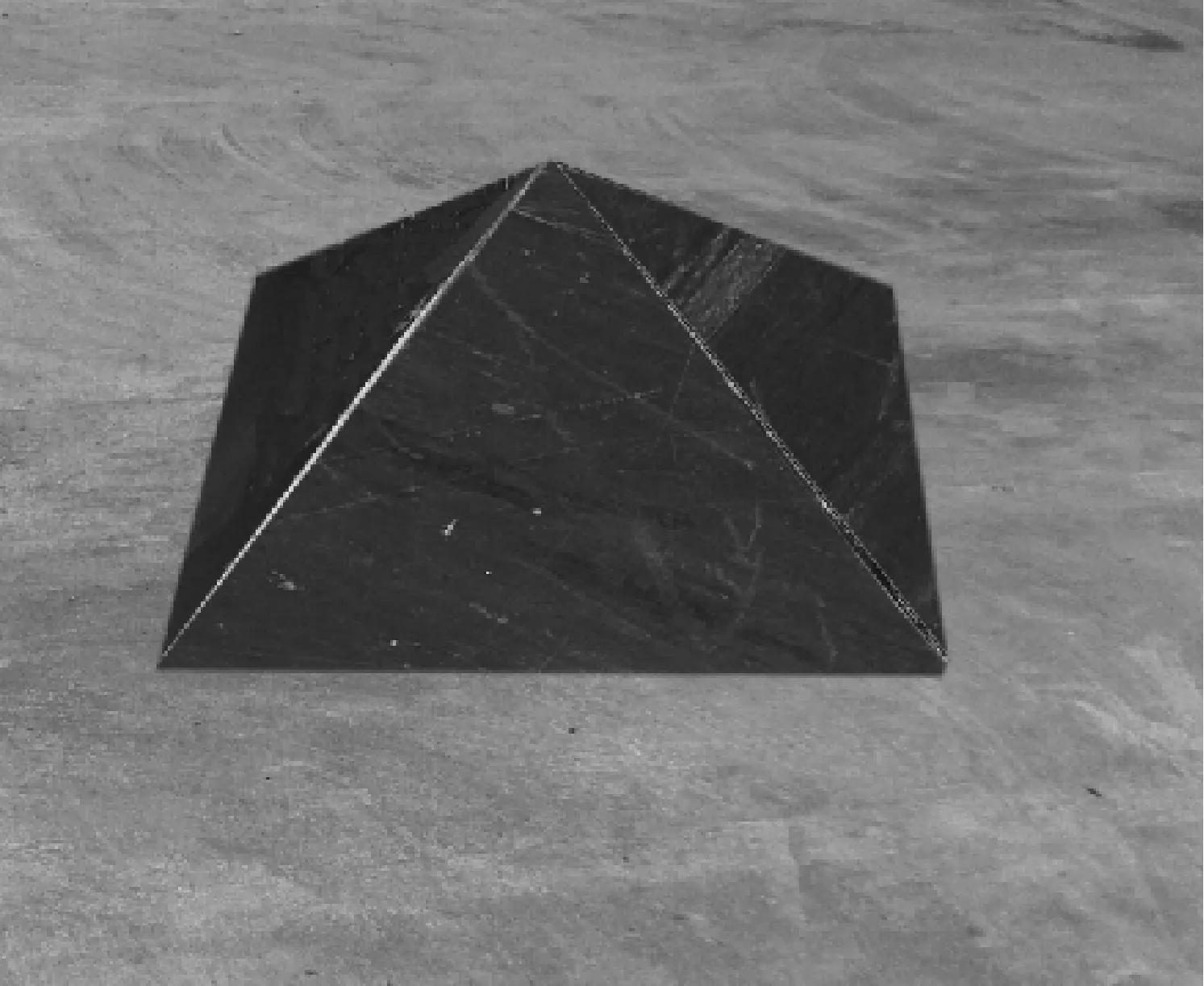
圖8 角錐形地標(biāo)
1.2 角錐形地面標(biāo)志的布設(shè)
飛行試驗(yàn)靶標(biāo)共10塊,分別布設(shè)在激光雷達(dá)2條掃描線方向(圖9),分布在掃描角度-30°~30°之間(設(shè)備掃描視場(chǎng)角為70°),地標(biāo)的底邊盡可能平行于飛行航跡且周圍無(wú)樹木房屋的遮擋。
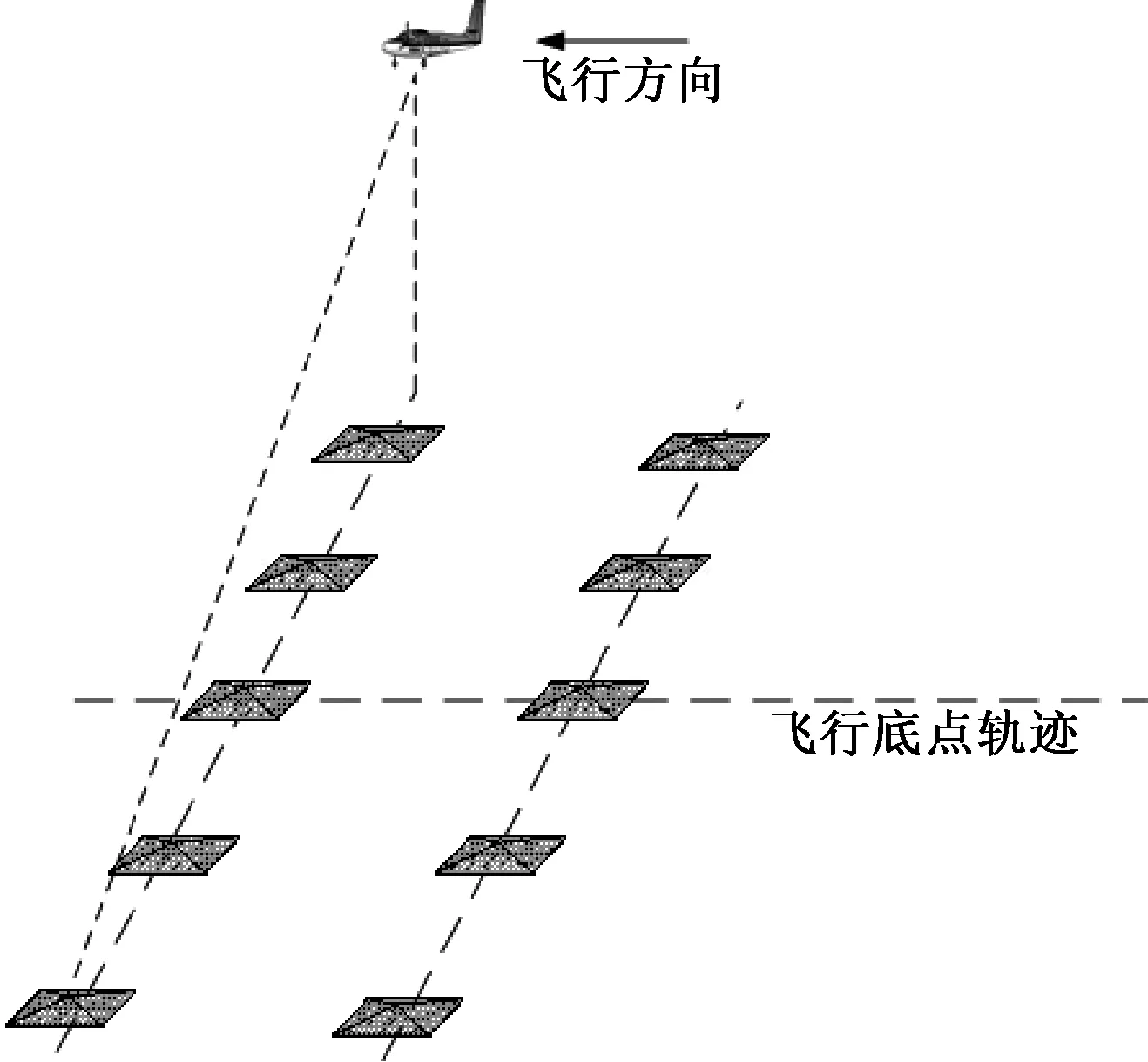
圖9 靶標(biāo)布設(shè)示意圖
1.3 野外飛行試驗(yàn)
根據(jù)要求按照預(yù)先設(shè)計(jì)的參數(shù)及航線進(jìn)行飛行,用LiDAR對(duì)布設(shè)了角錐形地標(biāo)的地面進(jìn)行掃描,獲取目標(biāo)區(qū)域的離散點(diǎn)云,用于后續(xù)的數(shù)據(jù)處理。
1.4 角錐形地標(biāo)的邊角點(diǎn)量測(cè)
飛行結(jié)束后,利用GPS RTK采集每個(gè)角錐形地標(biāo)的4個(gè)邊角點(diǎn),并利用求均值方式計(jì)算出每個(gè)地標(biāo)的中心頂點(diǎn)的平面坐標(biāo)。目前,由于RTK采集地面點(diǎn)的水平精度為厘米級(jí),而LiDAR點(diǎn)云的水平精度為分米級(jí),因此,該量測(cè)方法完全可以滿足水平精度檢查的需求。
1.5 基于點(diǎn)云數(shù)據(jù)解求各地標(biāo)中心點(diǎn)
解求中心點(diǎn)按以下3個(gè)步驟進(jìn)行:在TerraSolid軟件內(nèi)根據(jù)航線及地物找到地標(biāo)所在的大致位置,然后在軟件內(nèi)按強(qiáng)度信息顯示點(diǎn)云,根據(jù)點(diǎn)云與周圍地物強(qiáng)度信息的不同尋找地標(biāo)的準(zhǔn)確位置;提取地標(biāo)每個(gè)面上點(diǎn)云的坐標(biāo);使用MATLAB軟件基于每個(gè)地標(biāo)單塊三角板上的點(diǎn)擬合平面,并求出每個(gè)地標(biāo)四個(gè)擬合平面的交點(diǎn),即地標(biāo)的中心頂點(diǎn)。
1.6 基于角錐形地標(biāo)的平面精度檢查和質(zhì)量評(píng)定
假定利用均值方式算出的地標(biāo)中心頂點(diǎn)為真值,其坐標(biāo)為(xi,yi),利用擬合方式求出的中心頂點(diǎn)坐標(biāo)為(xj,yj),則每個(gè)點(diǎn)的誤差為

按該種方法求出每個(gè)點(diǎn)的水平誤差,并同時(shí)統(tǒng)計(jì)LiDAR點(diǎn)云的中誤差、平均誤差等參數(shù)。
2 外業(yè)試驗(yàn)與結(jié)果分析
為了對(duì)本文提出的水平精度檢查方法進(jìn)行驗(yàn)證,筆者于2015年9月在河南某地進(jìn)行野外飛行試驗(yàn),利用國(guó)產(chǎn)設(shè)備LC-3500同時(shí)獲取點(diǎn)云與影像數(shù)據(jù)(圖10)。
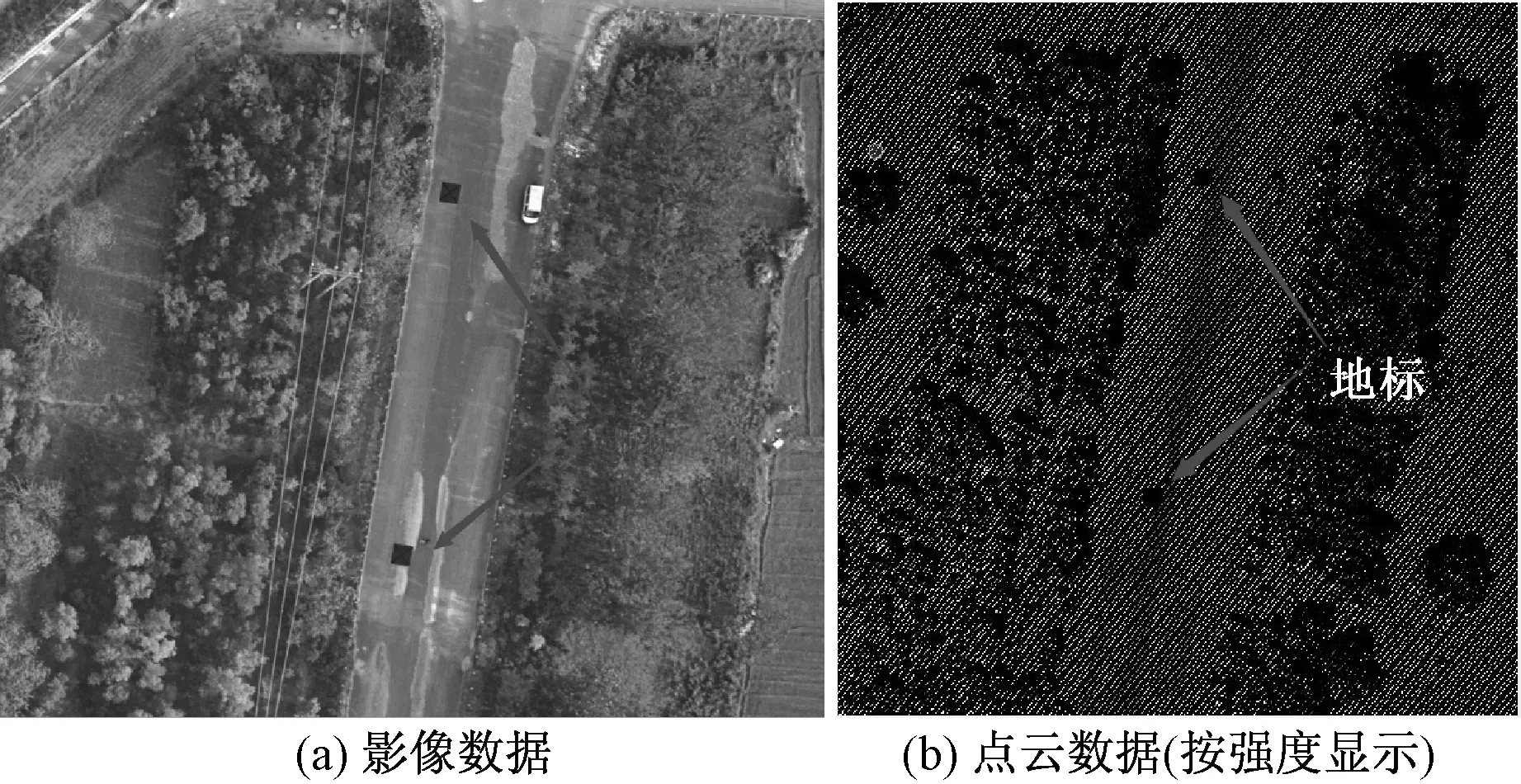
圖10 試驗(yàn)數(shù)據(jù)(局部)
試驗(yàn)時(shí),采用預(yù)定參數(shù),即飛行高度500 m,電機(jī)轉(zhuǎn)速1 020 r·min-1,發(fā)射頻率132 kmz,飛行速度100 km·h-1。飛行后,利用前面所敘述的方法進(jìn)行地面點(diǎn)云水平精度的檢查及地標(biāo)中心點(diǎn)擬合精度的估計(jì)。根據(jù)GPS RTK方式量測(cè)板角點(diǎn),水平精度都達(dá)到了毫米級(jí),完全滿足用于LiDAR水平精度評(píng)價(jià)的要求。
由表2可知,在按預(yù)定參數(shù)飛行的情況下,點(diǎn)云的中心點(diǎn)擬合精度為3.74 cm,為統(tǒng)計(jì)的點(diǎn)云誤差的34.4%,擬合誤差稍微偏大,但仍基本滿足點(diǎn)云水平精度評(píng)測(cè)的要求。根據(jù)試驗(yàn)所統(tǒng)計(jì)的10個(gè)地標(biāo)情況來(lái)看,X方向的平均誤差為2.66 cm,Y方向的平均誤差為2.09 cm,各項(xiàng)誤差沒(méi)有明顯偏差,近似成正態(tài)分布,可認(rèn)為為有效數(shù)據(jù)。最后統(tǒng)計(jì)出的點(diǎn)云水平方向上的平均偏差為10.86 cm,可認(rèn)為點(diǎn)云在相應(yīng)航高下的水平精度。
3 小結(jié)
通過(guò)上述試驗(yàn)及分析可知,用角錐形地標(biāo)能夠有效地評(píng)價(jià)LiDAR點(diǎn)云的平面精度。國(guó)產(chǎn)LiDAR
設(shè)備LC-3500的精度與國(guó)外的先進(jìn)設(shè)備相比較精度與穩(wěn)定性都有一定的差距,用圓形地標(biāo)與十字形地標(biāo)均需要地標(biāo)足夠大,而不需要過(guò)大的角錐形地標(biāo)綜合利用飛行向與掃描向的點(diǎn)云就能夠較好的檢查出點(diǎn)云的平面精度,而且試驗(yàn)數(shù)據(jù)可用于進(jìn)一步提高激光雷達(dá)的安置精度,優(yōu)化激光雷達(dá)的測(cè)量精度,且角錐形地標(biāo)容易拼接,拆卸后容易攜帶,成本低廉,可重復(fù)性使用,具有一定的推廣性。
由于LiDAR點(diǎn)云的水平精度受設(shè)備本身的工藝限制及系統(tǒng)檢校等多重因素的影響,因此難以確定點(diǎn)云的定位誤差源。另外,此種針對(duì)國(guó)產(chǎn)Z字形線掃描的LiDAR掃描方式能否適用于圓錐形及纖維光學(xué)陣列形掃描方式,則需要進(jìn)一步的研究。
[1] AXELSSON P. Processing of laser scanner data algorithms and applications[J]. ISPRS Journal of Photogrammetry and Remote Sensing,1999,54(2/3):138-147.
[2] 陳剛,田玉剛,程新文,等. 山區(qū)LiDAR高程精度野外檢驗(yàn)的一種新方法[J]. 測(cè)繪通報(bào),2008(2):41-43.
[3] 鄔建偉,馬洪超. 機(jī)載LiDAR激光束與掃描鏡對(duì)準(zhǔn)誤差影響分析[J]. 紅外與激光工程,2008,37(2):243-246.
[4] FILIN S,VOSSELMAN G. Adjustment of airborne laser altimetry strips[J]. The International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2004,35(B3):285-289.
[5] 黃先鋒,李卉,江萬(wàn)壽,等. 機(jī)載激光掃描數(shù)據(jù)誤差分析與精度改善研究進(jìn)展[J]. 遙感信息,2007(3):91-95.
[6] 張小紅. 機(jī)載激光雷達(dá)測(cè)量技術(shù)理論與方法[M]. 武漢:武漢大學(xué)出版社,2007.
[7] WOTRUBA L,MORSDORFF,MEIER E,et al. Assessment of sensor characteristics of an airborne laser scanner using geometric reference targets[C]//Proceedings of ISPRS Working Group Ⅲ/3Workshop Laser Scanning.Enschede: [S.N.] 2005: 1-6.
[8] 朱會(huì)平. 機(jī)載激光雷達(dá)測(cè)量系統(tǒng)檢校與精度評(píng)價(jià)[D]. 焦作:河南理工大學(xué),2011.
[9] CASELLA V,SPALLA A. Estimation of planimetric accuracy of laser scanning data: proposal of a method exploiting ramps [J]. International Archives of Photogrammetry and Remote Sensing,2000,33(B3):157-163.
[10] 馬洪超,張良,高廣,等. 一種檢查機(jī)載LiDAR平面精度的新方法[J]. 測(cè)繪通報(bào),2014(7):14-17.
(責(zé)任編輯:張瑞麟)
2016-09-30
邢吉昌(1990—),男,碩士研究生,研究方向?yàn)閲?guó)產(chǎn)機(jī)載LiDAR影像與數(shù)據(jù)融合處理,E-mail:443153371@qq.com。
施 昆,教授,研究方向?yàn)镚PS導(dǎo)航與定位,E-mail:phttxjc@126.com。
10.16178/j.issn.0528-9017.20170242
S23
A
0528-9017(2017)02-0326-04
文獻(xiàn)著錄格式:邢吉昌,施昆,李志杰. 國(guó)產(chǎn)機(jī)載LiDAR平面精度檢查新方法[J].浙江農(nóng)業(yè)科學(xué),2017,58(2):326-329.
猜你喜歡
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
制造技術(shù)與機(jī)床(2019年11期)2019-12-04 05:50:42
證券市場(chǎng)紅周刊(2018年38期)2018-05-14 23:41:07
證券市場(chǎng)紅周刊(2018年41期)2018-05-14 18:45:56
證券市場(chǎng)紅周刊(2018年33期)2018-05-14 16:47:08
證券市場(chǎng)紅周刊(2018年26期)2018-05-14 16:47:04
證券市場(chǎng)紅周刊(2018年11期)2018-05-14 16:39:55
證券市場(chǎng)紅周刊(2018年10期)2018-05-14 15:42:33
證券市場(chǎng)紅周刊(2018年5期)2018-05-14 14:45:46
證券市場(chǎng)紅周刊(2018年4期)2018-05-14 14:02:24