基于手眼標(biāo)定方程AX=XB的精度影響因素研究*
2017-03-02 07:05:56尚忠義董明利李偉仙
傳感器與微系統(tǒng) 2017年3期
關(guān)鍵詞:實(shí)驗(yàn)
尚忠義, 董明利, 李偉仙, 李 巍
(1.北京信息科技大學(xué) 光電測試技術(shù)北京市重點(diǎn)實(shí)驗(yàn)室,北京 100192;2.北京郵電大學(xué) 信息光子學(xué)與光通信研究院,北京 100876)
基于手眼標(biāo)定方程AX=XB的精度影響因素研究*
尚忠義1, 董明利1, 李偉仙1, 李 巍2
(1.北京信息科技大學(xué) 光電測試技術(shù)北京市重點(diǎn)實(shí)驗(yàn)室,北京 100192;2.北京郵電大學(xué) 信息光子學(xué)與光通信研究院,北京 100876)
機(jī)器人手位姿數(shù)據(jù)對手眼標(biāo)定精度的影響不可忽略,將對基于手眼標(biāo)定方程AX=XB的精度影響因素進(jìn)行分析。通過手眼標(biāo)定仿真和實(shí)測實(shí)驗(yàn)驗(yàn)證上述兩個(gè)因素對手眼標(biāo)定精度的影響與理論分析的一致性。通過仿真與實(shí)測實(shí)驗(yàn),總結(jié)得出了減小攝像機(jī)與靶標(biāo)間距離、減小機(jī)器人手的運(yùn)動(dòng)前后到基坐標(biāo)空間距離的相差距離,可提高手眼標(biāo)定精度,通過四元數(shù)法和矩陣直積法驗(yàn)證了此規(guī)律在解AX=XB標(biāo)定方程時(shí)的通用性,并且在攝像機(jī)與靶標(biāo)間距約為230 mm以及機(jī)器人手的運(yùn)動(dòng)前后到基坐標(biāo)空間距離的相差距離為3.240 1 mm時(shí),手眼標(biāo)定平移向量相對誤差最高精度可達(dá)0.040 3 %。
手眼標(biāo)定; 機(jī)器人; 精度評價(jià); 標(biāo)定方程
0 引 言
手眼標(biāo)定是確定機(jī)器人末端執(zhí)行器坐標(biāo)系與固定在其上攝像機(jī)坐標(biāo)系之間的剛性變換矩陣的過程,是計(jì)算機(jī)視覺領(lǐng)域中一個(gè)熱點(diǎn)問題,廣泛應(yīng)用于主動(dòng)視覺、三維測量與重建領(lǐng)域。
手眼標(biāo)定是由Tsai R Y等人[1]首先提出,其將手眼標(biāo)定問題轉(zhuǎn)化為求解齊次矩陣方程AX=XB問題,并將手眼標(biāo)定矩陣分成兩步來求解,這種方法計(jì)算簡單,但是旋轉(zhuǎn)矩陣誤差會傳遞給平移向量。在求解矩陣方程時(shí),Chou J C K[2]基于四元數(shù)原理采用奇異值分解的方法分步線性求解手眼關(guān)系,此方法將旋轉(zhuǎn)矩陣和平移矩陣同時(shí)求解。文獻(xiàn)[1~8]主要利用數(shù)學(xué)工具求解手眼標(biāo)定方程來提高手眼標(biāo)定精度,至今該領(lǐng)域研究相對成熟,精度提升空間有限。
目前,通過約束機(jī)器人運(yùn)動(dòng)方法提高手眼標(biāo)定精度是手眼標(biāo)定中一個(gè)重要的研究方向。馬頌德[9]提出通過控制機(jī)器人做些典型運(yùn)動(dòng)約束來求解手眼關(guān)系。Schimidt J[10]指出標(biāo)定數(shù)據(jù)同樣會影響最終的手眼標(biāo)定精度。Shi F H[11]提出了一種運(yùn)動(dòng)機(jī)制進(jìn)而提高了手眼在線標(biāo)定精度。鄒勁松[12]采用定點(diǎn)變位姿的方法對手眼關(guān)系求解的精度進(jìn)行分析。Tsai R Y[1]根據(jù)公式理論推導(dǎo)出影響手眼標(biāo)定精度的四個(gè)原則,根據(jù)這四個(gè)原則篩選位姿數(shù)據(jù),可提高手眼標(biāo)定精度。但是Tsai文獻(xiàn)中只做了大量的仿真實(shí)驗(yàn),缺乏相應(yīng)測量環(huán)境下的實(shí)測實(shí)驗(yàn)。
本文根據(jù)Tsai手眼標(biāo)定精度影響因素分析模型,結(jié)合搭建的測量系統(tǒng)并基于仿真和實(shí)測實(shí)驗(yàn)研究基于手眼標(biāo)定方程AX=XB的精度影響因素。
1 手眼標(biāo)定精度影響因素分析
Tsai R Y[1]在手眼標(biāo)定精度的影響因素方面做了理論分析,列出旋轉(zhuǎn)矩陣和平移向量的不確定度公式如下
(1)

(2)

通過式(1)和式(2)進(jìn)行分析,可以得到以下提高手眼標(biāo)定精度的因素:1)調(diào)整攝像機(jī)和靶標(biāo)間的距離(定義為因素①)使其最小;2)調(diào)整末端機(jī)器人手運(yùn)動(dòng)前后到基坐標(biāo)的距離(定義為因素②)相差最小;3)增大機(jī)器人手相對運(yùn)動(dòng)旋轉(zhuǎn)軸間的角度(定義為因素③);4)增大機(jī)器人手兩次相對運(yùn)動(dòng)的旋轉(zhuǎn)角度(定義為因素④);4個(gè)因素如圖1所示,圖1中①、②、③、④分別對應(yīng)上面4個(gè)因素。
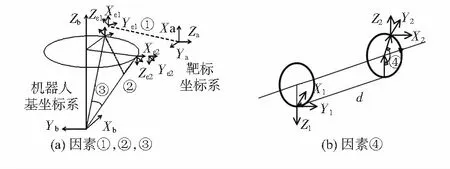
圖1 4個(gè)因素示意圖
Tsai R Y[1]中指出式(2)中|Te1|與|Th1-Th2|比∠(kh12,kh23)和θRe12產(chǎn)生較大的誤差,以Tsai R Y文章中結(jié)論為依據(jù)得出:因素①和②相對手眼標(biāo)定精度影響比③和④大。本文針對因素①和②進(jìn)行研究,將通過仿真和實(shí)測實(shí)驗(yàn)驗(yàn)證上述規(guī)律同樣也適用于四元數(shù)法和矩陣直積法。
2 實(shí)驗(yàn)結(jié)果與分析
2.1 精度評價(jià)方法
使用目前最常用的以目的為導(dǎo)向的精度評價(jià)方法進(jìn)行精度評估[4]。根據(jù)已標(biāo)定的手眼關(guān)系和機(jī)器手運(yùn)動(dòng)模型提供的變換矩陣,計(jì)算攝像機(jī)變換矩陣的估計(jì)值,將測量數(shù)據(jù)中的每個(gè)測量值與對應(yīng)的估計(jì)值相比較,定義旋轉(zhuǎn)和平移的誤差如下

(3)

2.2 仿真實(shí)驗(yàn)
本文對Tsai R Y[1]文章的仿真思想進(jìn)行改進(jìn),并在所搭建系統(tǒng)要求的基礎(chǔ)上做仿真,同時(shí)采用四元數(shù)法和矩陣直積法處理仿真數(shù)據(jù)。將仿真影響手眼標(biāo)定精度的因素表示如下:因素①:攝像機(jī)與靶標(biāo)間距|Te|。因素②:機(jī)器人手運(yùn)動(dòng)前后到基坐標(biāo)空間距離相差距離|Th1-Th2|。
2.2.1 因素①仿真實(shí)驗(yàn)
因素①仿真實(shí)驗(yàn)即仿真攝像機(jī)與靶標(biāo)間距對手眼標(biāo)定精度的影響。針對手眼標(biāo)定模型AX=XB,由于實(shí)際測量中攝像機(jī)到靶標(biāo)間距離(即為Ci的平移向量的模)變化范圍為300 %,仿真過程中將Ci的平移向量的模從0 %~320 %以80 %為步進(jìn)值放大,即將攝像機(jī)與靶標(biāo)的間距放大。仿真過程如下:設(shè)定手眼標(biāo)定真值X,給定一組滿足實(shí)際的測量要求數(shù)據(jù)Ci(i=1,2,…,n-1),計(jì)算Ai=Ci+1(Ci)-1(i=1,2…n-1),以及B=X-1AX。在Ci的旋轉(zhuǎn)軸上從0 %~6 %以0.5 %為步進(jìn)值加高斯噪聲,根據(jù)AX=XB分別用三種算法標(biāo)定X;最后增大Ci平移向量的模為原始量的80 %,計(jì)算得到Ai和Bi,依此類推增大Ci平移向量的模為160 %,240 %,320 %時(shí)按上述仿真過程進(jìn)行仿真。
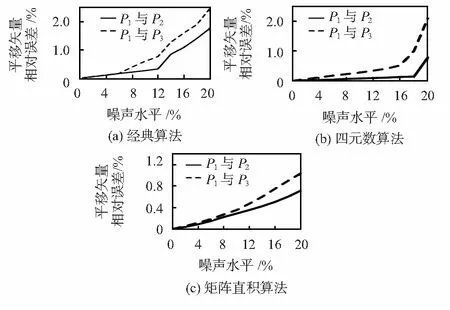
由圖2可知,三種方法中隨著Ci平移向量的模逐漸增大即攝像機(jī)與靶標(biāo)間距增大,平移向量相對誤差增大,因此,減小攝像機(jī)與靶標(biāo)的間距可使手眼標(biāo)定精度提高。

圖2 因素①對手眼標(biāo)定精度影響
2.2.2 因素②仿真實(shí)驗(yàn)
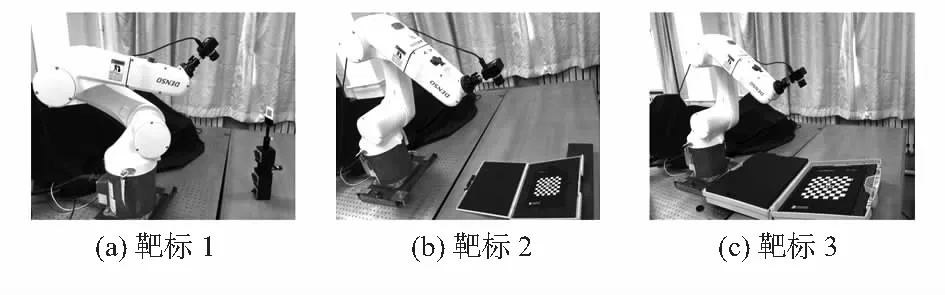
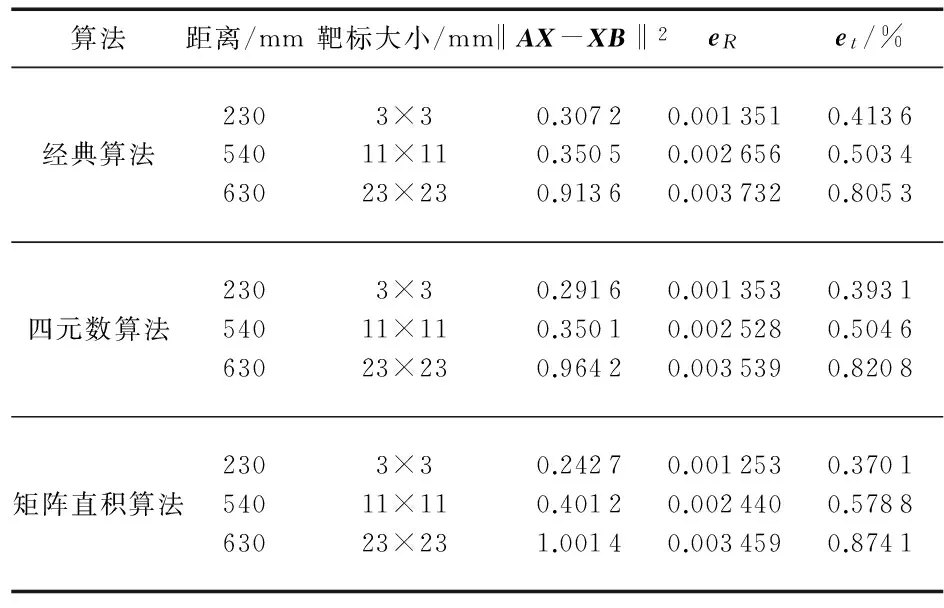
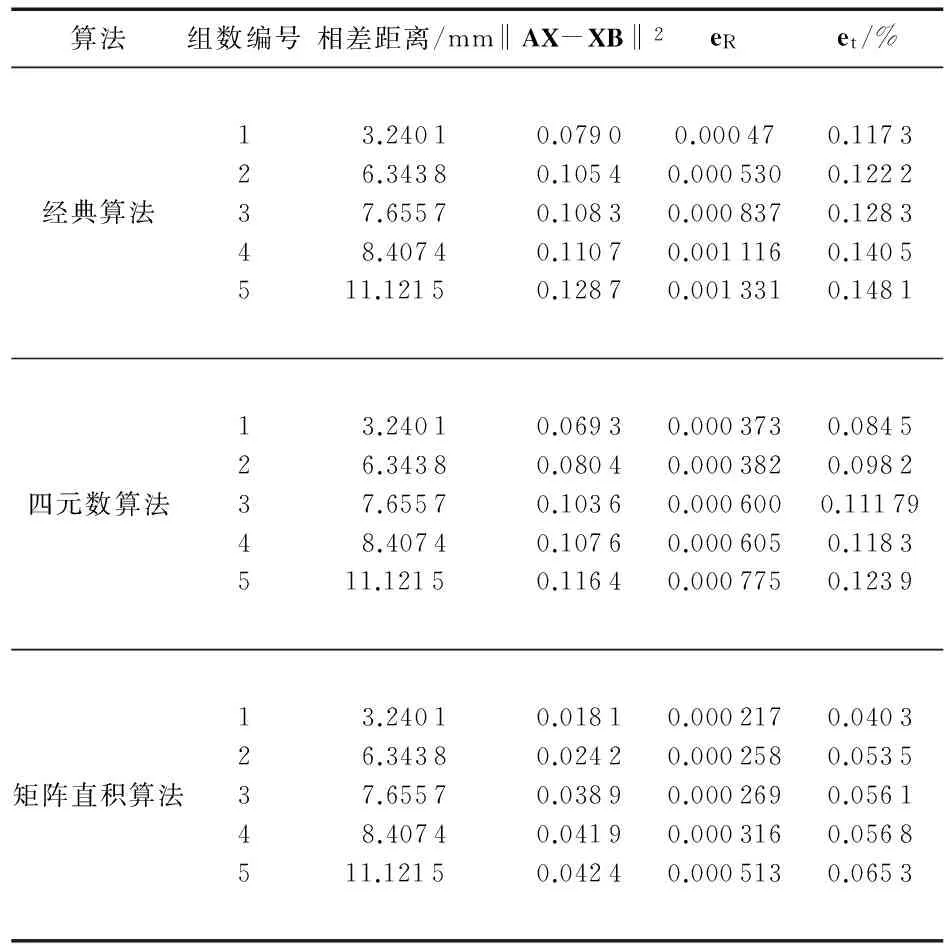
因素②仿真實(shí)驗(yàn)即為機(jī)器人手運(yùn)動(dòng)前后到基坐標(biāo)空間距離相差距離。針對因素②對手眼標(biāo)定精度影響做仿真實(shí)驗(yàn),根據(jù)位置到機(jī)器人基坐標(biāo)距離遠(yuǎn)近,將位置分為3個(gè)范圍,分別以半徑r1,r2,r3為約束(其中,r1 圖3 仿真位姿示意圖 圖4 因素②對手眼標(biāo)定精度影響 由圖4可知,三種算法從集合P1與P2篩選的位置比集合P1與P3篩選的位置的AX=XB標(biāo)定誤差小,因此,減小機(jī)器人手運(yùn)動(dòng)前后到基坐標(biāo)空間距離相差距離,可使手眼標(biāo)定精度提高,此規(guī)律適用于經(jīng)典算法,同時(shí)也適用于四元數(shù)方法和矩陣直積方法。 2.3 實(shí)測實(shí)驗(yàn) 為了驗(yàn)證仿真實(shí)驗(yàn)的結(jié)果,以DENSO的VS—6577GM型號的機(jī)器人為基礎(chǔ)平臺,在其機(jī)器人手末端安裝攝像機(jī),攝像機(jī)型號為凱視佳UD274M/C,其分辨率為1 628 pixel×1 236 pixel像元尺寸為4.4 μm,選用COMPUTAR 12 mm鏡頭。圖5(a)是在3 mm×3 mm棋盤格平面靶標(biāo),設(shè)其為靶標(biāo)1下的實(shí)測實(shí)驗(yàn)圖,圖5(b)在11 mm×11 mm棋盤格平面靶標(biāo),設(shè)其為靶標(biāo)2下的實(shí)測實(shí)驗(yàn)圖,圖5(c)是在23 mm×23 mm棋盤格平面靶標(biāo),設(shè)其為靶標(biāo)3下的實(shí)測實(shí)驗(yàn)圖。 圖5 棋盤格平面靶標(biāo)下實(shí)測實(shí)驗(yàn) 2.3.1 因素①實(shí)測實(shí)驗(yàn) 因素①實(shí)測實(shí)驗(yàn)中,根據(jù)現(xiàn)有的3個(gè)靶標(biāo),設(shè)計(jì)了3組實(shí)驗(yàn):攝像機(jī)坐標(biāo)系到靶標(biāo)坐標(biāo)系的距離約為230,540,630 mm時(shí),分別使用靶標(biāo)1、靶標(biāo)2、靶標(biāo)3。為比較在因素①對手眼標(biāo)定精度的影響,那么在三種靶標(biāo)情況下各做5組實(shí)驗(yàn)求各個(gè)誤差的平均值,以目的為導(dǎo)向的精度評價(jià)方式誤差比較結(jié)果如表1所示。 表1 攝像機(jī)與靶標(biāo)間距對手眼標(biāo)定精度影響的誤差比較 由表1可知,三種算法都隨著攝像機(jī)與靶標(biāo)間距的增大,誤差逐漸增大。三種算法,在攝像機(jī)坐標(biāo)系到靶標(biāo)坐標(biāo)系的距離約為230 mm時(shí),平移向量相對誤差最高精度為0.370 1 %;在攝像機(jī)坐標(biāo)系到靶標(biāo)坐標(biāo)系的距離約為540 mm時(shí),平移向量相對誤差最高精度為0.503 4 %;在攝像機(jī)坐標(biāo)系到靶標(biāo)坐標(biāo)系的距離約為630 mm時(shí),平移向量相對誤差最高精度為0.805 3 %,因此,攝像機(jī)與靶標(biāo)間距離越小,手眼標(biāo)定精度越高。 2.3.2 因素②實(shí)測實(shí)驗(yàn) 使用靶標(biāo)1做因素②對手眼標(biāo)定精度影響的實(shí)測實(shí)驗(yàn),在攝像機(jī)與靶標(biāo)的間距約為230 mm,采集15次,即各組位姿示意圖如圖6所示,機(jī)器人手位姿任意三個(gè)位姿組合,因此有15×14×13/3×2=455組組合,將455組組合按誤差從小到大排序,篩選誤差較小的前5組數(shù)據(jù)比較機(jī)器人手運(yùn)動(dòng)前后到基坐標(biāo)空間距離相差距離對手眼標(biāo)定精度影響,如表2所示。 圖6 各組位姿示意圖 由表2可知,三種算法都隨著運(yùn)動(dòng)前后相差距離的增加,誤差逐漸增大。因此,機(jī)器人手運(yùn)動(dòng)前后到基坐標(biāo)空間距離相差距離較小時(shí)手眼標(biāo)定精度高,在機(jī)器人手眼標(biāo)定過程中減小機(jī)器人手運(yùn)動(dòng)前后到基坐標(biāo)空間距離相差距離,可提高手眼標(biāo)定精度。 表2 因素②對手眼標(biāo)定精度影響的誤差比較 本文針對機(jī)器人非接觸測量中的手眼標(biāo)定問題,在Tsai R Y[1]手眼標(biāo)定算法的基礎(chǔ)上通過仿真實(shí)驗(yàn)和實(shí)測實(shí)驗(yàn)分析影響手眼標(biāo)定的因素,總結(jié)得到影響手眼標(biāo)定精度兩個(gè)關(guān)鍵因素,即在手眼標(biāo)定過程中,減小攝像機(jī)與靶標(biāo)間距離、減小機(jī)器人手的運(yùn)動(dòng)前后到基坐標(biāo)空間距離相差距離可提高手眼標(biāo)定精度,同時(shí)通過四元數(shù)法和矩陣直積法驗(yàn)證了此規(guī)律在解AX=XB標(biāo)定方程時(shí)的通用性,并且在攝像機(jī)與靶標(biāo)間距約為230 mm以及機(jī)器人手的運(yùn)動(dòng)前后到基坐標(biāo)空間距離的相差距離為3.240 1 mm時(shí),手眼標(biāo)定平移向量相對誤差最高精度可達(dá)0.040 3 %。 [1] Tsai R Y,Lenz R K.A new technique for fully autonomous and efficient 3D robotics hand/eye calibration[J].IEEE Transactions on Robotics and Automation,1989,5(3):345-358. [2] Chou J C K,Kamel M.Finding the position and orientation of a sensor on a robot manipulator using quaternions[J].International Journal of Robotics Research,1991,10(3):240-254. [3] Li A,Wang L,Wu D.Simultaneous robot-world and hand-eye calibration using dual-quaternions and Kronecker product[J].Inter J Phys Sci,2010,5(10):1530-1536. [4] 王君臣,王田苗,楊 艷,等.非線性最優(yōu)機(jī)器人手眼標(biāo)定[J].西安交通大學(xué)學(xué)報(bào),2011(9):15-20. [5] Shah Mili.Solving the robot-world/hand-eye calibration problem using the kronecker product[J].Journal of Mechanisms and Robotics,2013,5(3):031007. [6] 戚 芳,席 鋒.簡便高精度的機(jī)器人手眼視覺標(biāo)定方法[J].傳感器與微系統(tǒng),2006,25(1):27-29. [7] Heller J,Henrion D,Pajdla T.Hand-eye and robot-world calibration by global polynomial optimization[C]∥2014 IEEE International Conference on Robotics and Automation(ICRA),IEEE,2014:3157-3164. [8] Ruland T,Pajdla T,Kruger L.Globally optimal hand-eye calibration[C]∥2012 IEEE Conference on Computer Vision and Pattern Recognition(CVPR),IEEE,2012:1035-1042. [9] Ma Songde.A self-calibration technique for active vision system-s[J].IEEE Transactions on Robotics and Automation,1996,12(1):114-120. [10] Schmidt J,Niemann Heinrich.Data selection for hand-eye calibration:A vector quantization approach[J].International Journal of Robotic Res,2008,27(9):1027-1053. [11] Shi F H,Wang J H,Liu Y C.An approach to improve online hand-eye calibration[J].Lecture Notes in Computer Science,2005,3522:647-655. [12] 鄒勁松,黃凱鋒.一種新的三維測量機(jī)器人手眼標(biāo)定方法[J].計(jì)算機(jī)測量與控制,2015(7):2270-2273. Research on precision influence factors based on hand-eye calibration equationsAX=XB* SHANG Zhong-yi1, DONG Ming-li1, LI Wei-xian1, LI Wei2 (1.Beijing Key Laboratory for Optoelectronic Measurement Technology,Beijing Information Science and Technology University,Beijing 100192,China; 2.Institute of Information Photonics and Optical Comunication,Beijing University of Posts and Telecommunications,Beijing 100876,China ) Hand pose data of robot affect hand-eye calibration precision can not be ignored.Influence factor based on hand-eye calibration equationAX=XBwhich affect on precision is analyzed.Calibration simulation and real experiments verify that influence of the above two factors on eye-hand calibration precision is consistent with theoretical analysis.Through simulation and actual experiments,the results are summarized that reducing distance between camera and target, reducing the difference between distance between the front and rear movement of the hand to the base coordinate space distances of robot,can improve hand-eye calibration precision,and by quaternion and matrix direct product method,verify that this rule of law in the solutionAX=XBuniversal calibration equations, when distance between camera and target is about 230 mm and distance from movement of robot hand to based coordinate space is 3.240 1 mm,precision of relative error of hand-eye calibration translation vector is up to 0.040 3 %. hand-eye calibration; robot; precision evaluation; calibration equation 10.13873/J.1000—9787(2017)03—0036—04 2016—04—15 國家重大科學(xué)儀器設(shè)備開發(fā)專項(xiàng)項(xiàng)目(2013YQ22089304);教育部“長江學(xué)者與創(chuàng)新團(tuán)隊(duì)”發(fā)展計(jì)劃資助項(xiàng)目(IRT1212);北京市組織部青年骨干個(gè)人項(xiàng)目 TP 242 A 1000—9787(2017)03—0036—04 尚忠義(1988-),男,碩士研究生,主要研究方向?yàn)橐曈X精密測量。 董明利,女,通訊作者,教授,碩士生導(dǎo)師,主要從事視覺精密測量研究工作,E-mail:dongml@sina.com。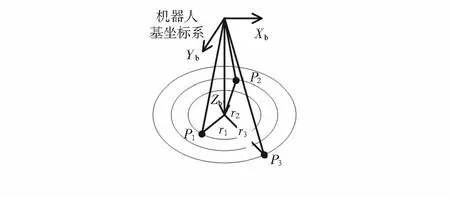

3 結(jié) 論
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(bào)(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
