氣壓式EPB試驗臺設(shè)計與實驗
2017-03-06 02:08:05龔建石賈天樂田達(dá)笠王洪亮
河北科技大學(xué)學(xué)報 2017年1期
龔建石,賈天樂,田達(dá)笠,王洪亮,黃 滌
(1.江蘇澳瑞思液壓潤滑設(shè)備有限公司,江蘇啟東 226200;2.南京理工大學(xué)機(jī)械工程學(xué)院,江蘇南京 210094;3中國汽車技術(shù)研究中心,天津 300300)
氣壓式EPB試驗臺設(shè)計與實驗
龔建石1,賈天樂2,田達(dá)笠3,王洪亮2,黃 滌2
(1.江蘇澳瑞思液壓潤滑設(shè)備有限公司,江蘇啟東 226200;2.南京理工大學(xué)機(jī)械工程學(xué)院,江蘇南京 210094;3中國汽車技術(shù)研究中心,天津 300300)
為了驗證氣壓式電子駐車制動系統(tǒng)(EPB)的功能及其控制策略的準(zhǔn)確性和可靠性,設(shè)計了氣壓式電子駐車制動系統(tǒng)試驗臺。介紹了氣壓式EPB試驗臺的工作原理,詳述了空氣壓縮存儲模塊、制動模塊、人機(jī)交互模塊、信號模擬模塊、數(shù)據(jù)采集模塊、故障診斷模塊,確定了試驗臺的結(jié)構(gòu)組成,最后對氣壓式電子駐車制動系統(tǒng)的快速充放氣功能進(jìn)行了測試。結(jié)果表明,與手控閥相比,氣壓式EPB制動過程更靈敏,同時也說明此試驗臺可以滿足氣壓式電子制動系統(tǒng)的測試需求。
車輛工程;電子駐車制動;氣壓式;試驗臺;設(shè)計
汽車駐車制動系統(tǒng)的作用是使已停駛的汽車可靠并且無時間限制地停駐在一定位置甚至斜坡上,而且具有坡道起步和緊急制動等功能[1-5]。為了提高其工作可靠性,傳統(tǒng)的駐車系統(tǒng)采用機(jī)械式驅(qū)動結(jié)構(gòu),而不是采用液壓式或者氣壓式系統(tǒng)[6-8]。但是,隨著電子控制技術(shù)的蓬勃發(fā)展,電子駐車制動系統(tǒng)(electricalparkingbrake,EPB)受到了越來越多的關(guān)注[9-11]。
傳統(tǒng)的機(jī)械式駐車制動系統(tǒng)是通過駕駛?cè)藛T操縱駐車手柄,帶動制動蹄片張開(鼓式制動器)或制動卡鉗活塞移動(盤式制動器)完成駐車。而EPB系統(tǒng)則是通過電機(jī)施加制動力,駕駛?cè)藛T只需要操作按鈕,然后由電子駐車制動系統(tǒng)的ECU控制部件,來完成駐車制動。相比較機(jī)械式系統(tǒng)而言,氣壓式EPB具備坡道起步、自動駐車、緊急制動等功能,極大改善了駕駛過程中的安全性和方便性[12-14]。
在汽車電子駐車制動系統(tǒng)的開發(fā)過程中,需要對設(shè)計的電子駐車制動系統(tǒng)樣機(jī)進(jìn)行模擬試驗,在試驗過程中對其結(jié)構(gòu)與電子控制系統(tǒng)進(jìn)行優(yōu)化與改進(jìn),并對其性能指標(biāo)和可靠性進(jìn)行初步驗證。針對這種情況,非常有必要開發(fā)相應(yīng)的電子駐車制動系統(tǒng)試驗裝置。本文在介紹氣壓式電子駐車制動系統(tǒng)的組成及工作原理的基礎(chǔ)上,對EPB試驗臺的硬件設(shè)計進(jìn)行描述,介紹了該試驗臺的快速充放氣實驗,并且進(jìn)行了驗證。
1 氣壓式電子駐車制動系統(tǒng)簡介
氣壓式電子駐車制動系統(tǒng)是將壓縮空氣作為動力源,使車輪產(chǎn)生制動,駕駛員只需按不同的制動強(qiáng)度要求,控制踏板的行程,釋放出不同數(shù)量的壓縮空氣,便可控制制動氣壓的大小以獲得所需要的制動力。氣壓制動裝置的特點是踏板行程較短,操作比較輕便,制動力較大,但消耗發(fā)動機(jī)的動力,裝置結(jié)構(gòu)較為復(fù)雜,制動時不如液壓制動柔和平穩(wěn)。氣壓制動目前主要應(yīng)用于中、重型汽車上[15]。
氣壓式EPB結(jié)構(gòu)較緊湊,駐車制動力較大,執(zhí)行部件采用一體化的設(shè)計思想,控制部件依托于CAN總線網(wǎng)絡(luò),系統(tǒng)反應(yīng)更為迅速。氣壓式電子駐車制動系統(tǒng)結(jié)構(gòu)示意圖如圖1所示[16-20]。
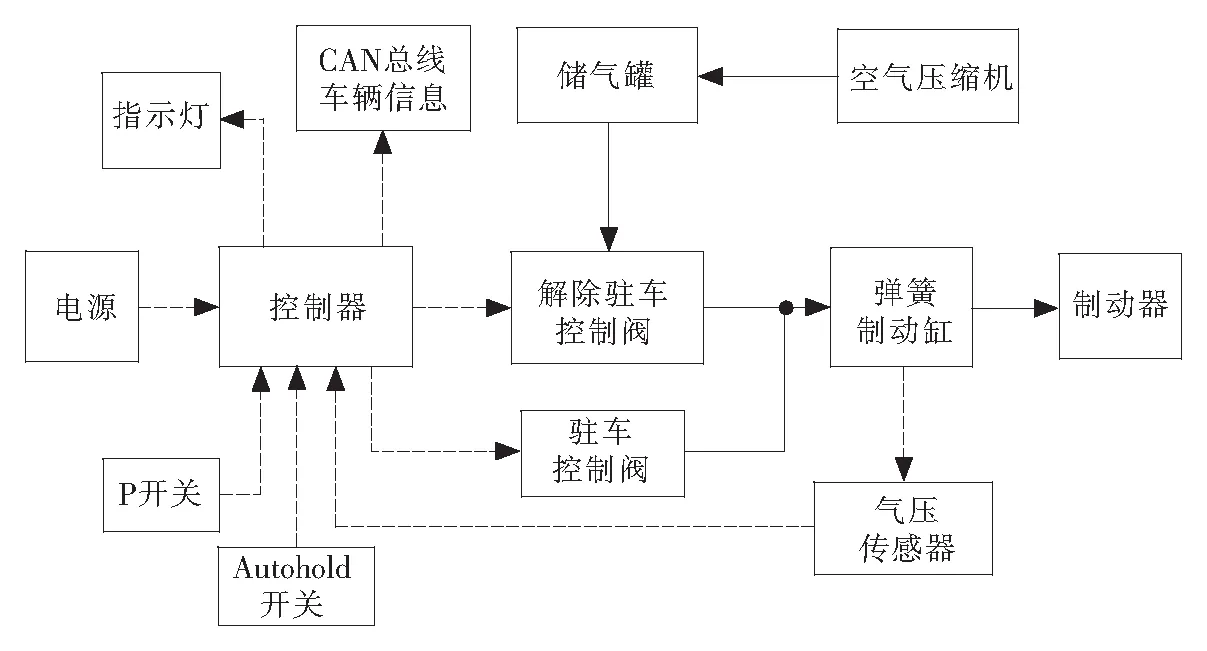
圖1 氣壓式電子駐車制動系統(tǒng)結(jié)構(gòu)示意圖Fig.1 Pneumatic electronic parking brake system structure
從圖1中可以看出,氣壓式電子駐車制動系統(tǒng)包含電路(虛線部分)和氣路(實線部分)兩個方面。電路主要是與EPB電控單元相連的電子線路,包括EPB控制電磁閥線路、接收氣壓信號線路和駐車信號顯示線路。EPB氣路線路主要是壓縮機(jī)壓縮空氣,儲存在儲氣瓶中。當(dāng)氣壓式EPB工作時,壓縮空氣通過單向閥及開關(guān)閥,然后通過繼動閥和電路控制的控制閥,最后到達(dá)彈簧制動缸,形成制動力。
從圖1中可以看出試驗臺需要以下基本功能,才能保證實現(xiàn)氣壓式電子制動系統(tǒng)的各項測試需求:1)壓縮及存儲空氣;2)氣壓實時測量;3)人機(jī)交互;4)電路實時控制檢測5)數(shù)據(jù)采集;6) 故障診斷。
2 氣壓式電子駐車制動系統(tǒng)試驗臺模塊設(shè)計
為實現(xiàn)對電子駐車制動系統(tǒng)功能的測試,本文所設(shè)計的氣壓式電子駐車系統(tǒng)試驗臺由圖2所示的模塊組成。
2.1 空氣壓縮存儲模塊
這里使用空氣壓縮機(jī)壓縮空氣,通過空氣濾清器過濾其中的水分、油污,儲存在存儲罐中。氣壓式EPB一般用于中、重型汽車,壓縮空氣作為動力源。一般根據(jù)制動強(qiáng)度的不同選用不同工作壓力、容積流量的空氣壓縮機(jī)。
在設(shè)計試驗臺時,綜合考慮經(jīng)濟(jì)及實用性等因素,選用功率較小的車用空氣壓縮機(jī),見圖3。在設(shè)計中選用工作壓力為0.8MPa、容積流量為110L/min的壓縮機(jī),同時選用容量為12L的存儲罐。
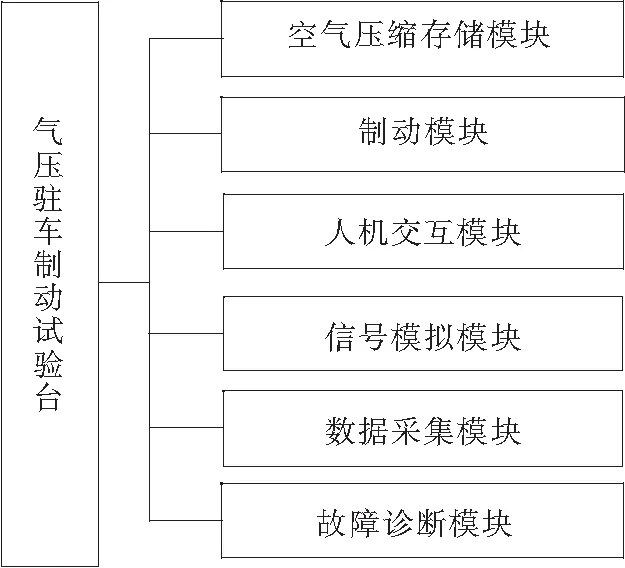
圖2 試驗臺組成模塊Fig.2 Test platform modules

圖3 空氣壓縮機(jī)
Fig.3 Air compressor
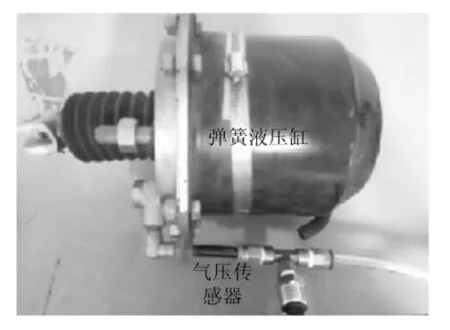
圖4 彈簧制動缸及氣壓傳感器
Fig.4 Spring brake cylinder and air pressure sensor

圖5 人機(jī)交互模塊
Fig.5 Human computer interaction module
2.2 制動模塊
氣壓式駐車制動系統(tǒng)的核心部件是彈簧制動缸。制動缸在汽車停車時就輸出了較大的壓力到制動蹄片,因此汽車如若要行駛,則需要一個較大的推力來壓縮彈簧,釋放其對制動蹄片的制動壓緊力。該推力由汽車上的汽車儲氣罐中的高壓氣體來實現(xiàn),即給彈簧制動缸充氣釋放駐車制動,給彈簧制動缸放氣施加駐車制動。由于是模擬氣壓式EPB,選用如圖4所示的小號制動缸(直徑為16mm)。
2.3 人機(jī)交互模塊
本文所設(shè)計的整體式電子駐車制動系統(tǒng)試驗臺的人機(jī)交互模塊整合在一個電子開關(guān)盒中。
如圖5所示,開關(guān)盒的交互元件包括手動開關(guān)、AUTOHOLD開關(guān)、電源指示燈、報警指示燈以及總開關(guān)。定義短扣/短按手動開關(guān)動作為駐車/解除駐車意愿;短按AUTOHOLD開關(guān),進(jìn)入AUTOHOLD模式;若駕駛員操作不當(dāng)或系統(tǒng)故障時,報警指示燈亮;整體式電子駐車制動系統(tǒng)試驗臺工作時,電源指示燈亮;右旋總開關(guān)能夠立即切斷試驗臺電源。
另外,該試驗臺需要提供24V電源,使用穩(wěn)壓電源代替,將電壓調(diào)整至24V。
2.4 信號模擬模塊
通過CAN網(wǎng)絡(luò)將發(fā)動機(jī)轉(zhuǎn)速、轉(zhuǎn)矩、油門信號等相關(guān)信息傳遞給電控單元,同時電控單元也可以自行采集和檢測相關(guān)的汽車信息,比如變速器檔位、換檔手柄、制動信號等,對汽車的行駛狀況進(jìn)行判斷,進(jìn)而形成控制邏輯,驅(qū)動電磁閥動作,實現(xiàn)對駐車制動的控制。
在設(shè)計過程中,通過VB界面的滾動條模擬發(fā)動機(jī)轉(zhuǎn)速,如圖6所示,由于只是大致模擬汽車的狀態(tài),分析汽車的靜態(tài)情況,故將轉(zhuǎn)速、轉(zhuǎn)矩及油門信號設(shè)置成比例變化,即轉(zhuǎn)速、轉(zhuǎn)矩及油門信號同時成線性變化。然后通過USB-CAN轉(zhuǎn)換器將這3個模擬信號轉(zhuǎn)化成CAN信號發(fā)送給下位機(jī),下位機(jī)對電磁閥操作進(jìn)行邏輯控制。
由于氣壓式駐車制動系統(tǒng)具有自動駐車功能,需要判斷駕駛員是否確實想要駐車。當(dāng)駕駛員按下AUTOHOLD鍵后,當(dāng)車速低于5km/h時,判定為駕駛員想要駐車,而不是誤操作。另外,由于該試驗臺不需要考慮汽車變速器處于哪種檔位,故將汽車檔位設(shè)為3種狀態(tài):前進(jìn)擋(D擋)、倒擋(R擋)和空擋(N擋)。其中R擋和N擋只能顯示其中一種狀態(tài),當(dāng)不是R擋和N擋時,默認(rèn)為D擋。
2.5 數(shù)據(jù)采集模塊
氣壓式駐車制動系統(tǒng)需要使用氣壓傳感器實時采集數(shù)據(jù),通過氣壓的大小判斷制動力的大小。也就是將制動力的大小反饋給控制單元,來實現(xiàn)更準(zhǔn)確的控制。所以將氣壓傳感器安裝在彈簧制動缸前端,另一側(cè)通過電路反饋給電控單元ECU(見圖4)。
試驗臺需要實時檢測氣壓、轉(zhuǎn)速、油門、轉(zhuǎn)矩等狀態(tài),就是通過將電控單元接收的信號通過CAN-USB適配器,將信號顯示在用VB設(shè)計的接收界面上,如圖7所示。同時,在給定的汽車狀態(tài)下,比如汽車質(zhì)量、軸距、傳動比等,實時監(jiān)測駐車制動氣壓值,同時對系統(tǒng)的控制包括駐車開關(guān)狀態(tài)、電磁閥開啟狀態(tài)等也進(jìn)行顯示。
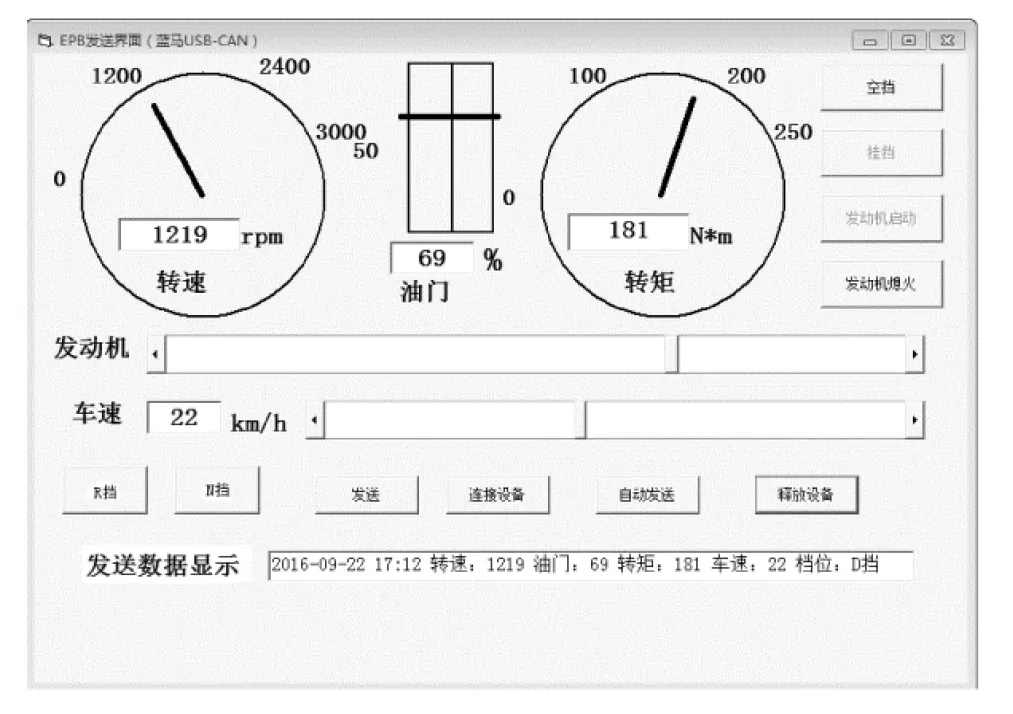
圖6 EPB發(fā)送界面
Fig.6 EPB sending interface
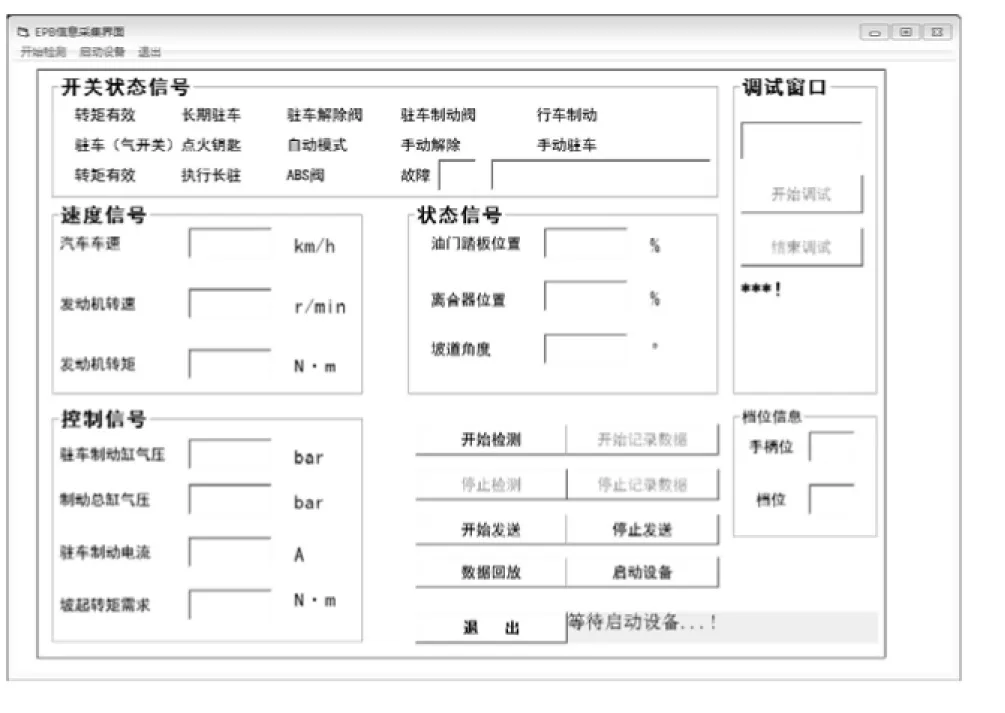
圖7 數(shù)據(jù)采集界面
Fig.7 Data acquisition interface
2.6 故障診斷模塊
隨著汽車電子系統(tǒng)越來越復(fù)雜,診斷功能已經(jīng)成為電控系統(tǒng)設(shè)計的一個重要組成部分。診斷分為離線診斷和在線診斷兩種方式。由于氣壓式駐車制動系統(tǒng)需要具有坡道起步和自動駐車等功能,一旦發(fā)生故障可能會出現(xiàn)“后溜”等極具危險的事故,故該試驗臺采用在線診斷方式。這樣確保汽車在運行過程中,診斷系統(tǒng)實時監(jiān)測電子控制系統(tǒng)各組成部分的工作情況,如有異常,根據(jù)特定的算法判斷出具體的故障,以代碼的形式顯示并存儲下來,同時啟動相應(yīng)的容錯處理功能,使汽車能夠接近正常狀態(tài)運行而不至于造成更嚴(yán)重的后果。
故障診斷采用CAN總線傳輸方式,同樣顯示在圖7所示的接收界面上,由于有多組CAN數(shù)據(jù),這時需要通過ID的不同進(jìn)行甄別,同時在接收程序中添加判斷程序,對不同ID的數(shù)據(jù)進(jìn)行分別處理。根據(jù)氣壓式電子駐車制動系統(tǒng)的基本結(jié)構(gòu)特點,暫確定了20余種較為常見的故障,并定義了相應(yīng)的故障碼,主要有:ECU故障、AUTOHOLD開關(guān)故障、CAN故障、傳感器故障、氣壓信號故障等。
以CAN故障判斷策略為例,其判斷過程如下:判斷點火鑰匙是否存在,在此前提下檢測CAN是否有信號,若無CAN信號則產(chǎn)生故障碼;在CAN有信號的前提下若檢測到有信息錯誤標(biāo)志,亦產(chǎn)生CAN故障碼。此時發(fā)動機(jī)轉(zhuǎn)速、發(fā)動機(jī)轉(zhuǎn)矩、檔位、車速等無信號或有信號但無變化。
2.7 氣壓式EPB試驗臺
在對氣壓式駐車制動各模塊設(shè)計完后,最終定型的試驗臺連接原理圖如圖8所示,定型的試驗臺如圖9所示。
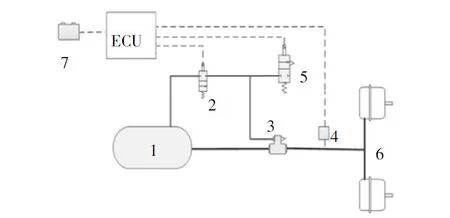
圖8 氣壓式EPB試驗臺原理圖
Fig.8 Schematic diagram of the air pressuretype EPB experimental platform
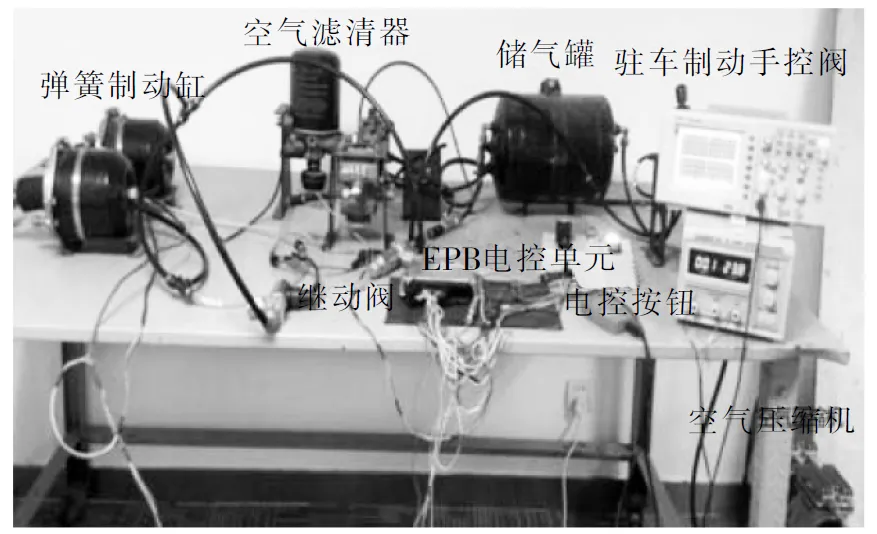
圖9 氣壓式EPB試驗臺
Fig.9 Air pressure type EPB experimental platform
3 快速充放氣實驗
在駐車制動時,當(dāng)電控單元接收到駐車信號后,開啟放氣閥將制動氣室內(nèi)的高壓氣體排出,并通過氣壓傳感器檢測制動氣室氣壓,駐車后關(guān)閉放氣電磁閥。在此過程中要求電磁閥能夠及時響應(yīng),以免因為車輛駐車不及時而造成事故。這要求控制管路上的電磁閥能夠有足夠的響應(yīng)速度以及足夠大的內(nèi)徑,從而滿足控制要求。
在駐車系統(tǒng)中,首先使用手動閥進(jìn)行控制,隨后在同一系統(tǒng)中使用電磁閥替代手動閥進(jìn)行快速充放氣試驗,將2次試驗過程中采集的數(shù)據(jù)況進(jìn)行比較,見圖10。
由圖10可以看出,在打開控制氣路充氣時,駐車制動缸氣壓上升過程中,電磁閥控制下的充氣速率較手動閥更快,因而可以采用該電磁閥代替手動閥,將其應(yīng)用于電子駐車系統(tǒng)可以使駐車系統(tǒng)響應(yīng)更靈敏。
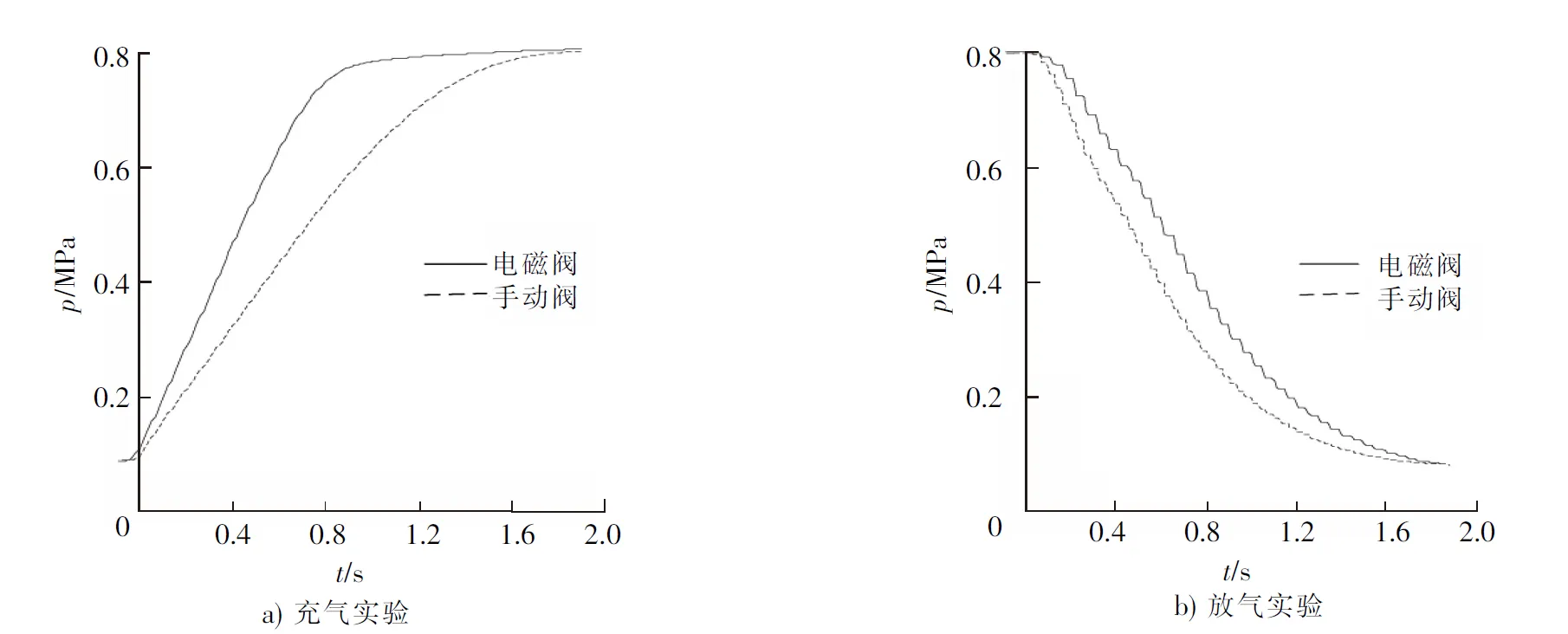
圖10 手控閥與電控閥快速充放氣特性
Fig.10 Rapid air inflation and deflation characteristics of hand control valve and electric control valve
4 結(jié) 語
為實現(xiàn)對氣壓式電子駐車制動系統(tǒng)功能的測試,設(shè)計出了一種氣壓式電子駐車制動試驗臺。由電子駐車制動系統(tǒng)的原理圖確定了試驗臺的各功能模塊及其結(jié)構(gòu)。在搭建出來的試驗臺上進(jìn)行了電子駐車制動系統(tǒng)和傳統(tǒng)制動系統(tǒng)的充放氣實驗。測試結(jié)果表明,本文所設(shè)計的氣壓式電子駐車制動系統(tǒng)試驗臺是合理的,一定程度上可以代替實車,用于對氣壓式電子駐車制動系統(tǒng)的坡道起步、自動駐車、故障診斷等功能進(jìn)行模擬測試。這樣在優(yōu)化和改進(jìn)電子控制系統(tǒng)時,就不必一直進(jìn)行實車試驗,節(jié)約了大量的時間和精力,極大地改善了試驗環(huán)境。但是,本試驗臺采用的車輛信號是人為的模擬信號,與實車相比具有一定的失真,因此,還需要進(jìn)一步完善。
/
:
[1] 王洪亮,趙熙俊,劉海鷗.重型汽車AMT電控氣動坡起輔助控制[J].山東大學(xué)學(xué)報(工學(xué)版),2009,39(5):79-83.WANGHongliang,ZHAOXijun,LIUHaiou.Theelectronic-pneumatichill-startingassistcontrolforheavy-dutyvehiclewithAMT[J].JournalofShandongUniversity(EngineeringScience),2009,39(5):79-83.
[2] 李玉林.汽車電子駐車制動系統(tǒng)的研究[D].哈爾濱:哈爾濱理工大學(xué),2013.LIYulin.ResearchofAnElectronicParkingBrakeSystemforAutomobile[D].Harbin:HarbinUniversityofScienceandTechnology,2013.
[3] 鄭婷,王洪亮,王顯會,等.電子駐車制動系統(tǒng)控制電路設(shè)計[J].機(jī)械工程與自動化,2014,185(4):164-165.ZHENGTing,WANGHongliang,WANGXianhui,etal.Controlcircuitdesignforelectronicparkingbrakesystem[J].MechanicalEngineering&Automation,2014,185(4):164-165.
[4] 谷文豪,王洪亮,皮大偉,等.基于傾角傳感器的坡道角度識別研究[J].河北科技大學(xué)學(xué)報,2015,36(6):566-572.GUWenhao,WANGHongliang,PIDawei,etal.Researchonrecognitionoframpanglebasedontransducer[J].JournalofHebeiUniversityofScienceandTechnology, 2015,36(6):566-572.
[5] 王洪亮,董巍,李楠,等.中/重型汽車電子駐車系統(tǒng)設(shè)計及控制研究[J].河北科技大學(xué)學(xué)報,2015,36(2):118-125.WANGHongliang,DONGWei,LINan,etal.Designandresearchontheelectronicparkingbrakesystemofthemediumandheavydutyvehicles[J].JournalofHebeiUniversityofScienceandTechnology, 2015,36(2):118-125.
[6] 魏巍.機(jī)械式電子駐車制動系統(tǒng)容錯控制方法研究[D].南京:南京理工大學(xué),2015.
[7] 郭立書,施正堂,張正兵,等.電子駐車制動系統(tǒng)[J].農(nóng)業(yè)機(jī)械學(xué)報,2008(12):31-33.GUOLishu,SHIZhengtang,ZHANGZhengbing,etal.Electricparkingbrakesystem[J].TransactionoftheChinesesocietyforagriculturemachinery, 2008(12):31-33.
[8]LEECH,CHUNGB,LEEYO,etal.Faultdetectionmethodforelectricparkingbrakesystemswithsensorlessestimationusingcurrentripples[J].InternationalJournalofAutomotiveTechnology,2010(11):387-394.
[9]DEPREZP,DEVAUDE,PLANCHONP.Methodanddeviceforautomaticallyreleasingtheautomaticparkingbrakewhenstarting[P].US: 20060049691A1, 2006-03-09.
[10]MONTIA,POTHINR.SyatemandMethodfoeControllingtheReleaseofanAutomaticParkingBrakeDeviceOnboardanAutomobile[P].US: 20100262329A1,2010-10-14.
[11]JANGM,LEEY,LEEW,etal.Novelclampingforcecontrolforelectronicparkingbrakesystem[C]//Proceedingsofthe7thAsianControlConference.HongKong:[s.n.], 2009: 1588-1593.
[12]BRAEUERT.HillholderAssistantanceSystemHavingaVariableConditionforReleasingtheBrake[P].US: 20100262349A1, 2010-10-14.
[13] 王洪亮,苑慶澤,鐘煥祥,等.基于EPB的汽車坡道起步自動控制技術(shù)[J].北京理工大學(xué)學(xué)報, 2014, 34(4): 344-348.WANGHongliang,YUANQingze,ZHONGHuanxiang,etal.Researchonthehill-startautocontrolforthevehicleswithEPB[J].TransactionsofBeijingInstituteofTechnology, 2014, 34(4): 344-348.
[14]FANTAZIA.HEMERYF.SpringBrakeAccumulatorCylinder[P].US:7866765B2, 2011-01-11.
[15]GEYERA.LinearElectromechanicalScrewActuatorforaParkingBrake[P].US:7337883, 2008-03-04.
[16] 王超勇.車輛電子駐車制動系統(tǒng)(EPB)的硬件設(shè)計研究[D].南京:南京理工大學(xué),2009.WANGChaoyong.DesignandResearchofEPBSystem[D].Nanjing:NanjingUniversityofScienceandTechnology,2009.
[17]SUNAOH,TOMOAKIF,MASAHIRON.BrakeControlApparatusandMethod[P].US:7000998B2,2006-02-21.
[18]HARALDK,LARRYR.Miller.ElectromechanicalParkingBrake[P].US: 6561321B1, 2003-05-13.
[19]CHENGFei,GUOXuexun.Theapplicationanddevelopmenttrendofcarslinecontroltechnique[J].ShanghaiCar,2007(3):37-40.
[20]CRONJEPH,ELSPS.Improvingoff-roadvehiclehandlingusinganactiveanti-rollbar[J].Terramechanics,2010,10(47):179-189.
Design and experiment of pneumatic EPB test platform
GONGJianshi1,JIATianle2,TIANDali3,WANGHongliang2,HUANGDi2
(1.JiangsuHonestHydraulic&LubricateEquipmentCompanyLimited,Qidong,Jiangsu226200,China;2.SchoolofMechanicalEngineering,NanjingUniversityofScienceandTechnology,Nanjing,Jiangsu, 210094,China;3.ChinaAutomotiveTechnologyResearchCenter,Tianjin300300,China)
Inordertoverifytheaccuracyandreliabilityofthefunctionandcontrolstrategyofthepneumaticelectronicparkingbrake(EPB)system,atestplatformofthepneumaticEPBsystemisdesigned.TheworkingprincipleoftheairpressuretypeEPBtestplatformisintroduced,thecompositionoftheplatformisconfirmed,includingairpressstoragemodule,brakingmodule,man-machineinteractionmodule,signalimitationmodule,datacollectionmodule,andfaultdiagnosismodule,andthefunctionofrapidcharginganddischargingofthepneumaticEPBsystemiscarriedout.Theresultsshowthat,comparedwithmanualcontrolvalve,theairpressureEPBbrakingprocessismoresensitive,andthetestplatformcanmeetthetestrequirementsofthepneumaticelectronicbrakesystem.
vehicleengineering;electricalparkingbrake(EPB);pneumatic;testplatform;design
1008-1542(2017)01-0013-06
10.7535/hbkd.2017yx01003
2016-09-02;
2016-09-27;責(zé)任編輯:馮 民
國家自然科學(xué)基金(51205209,51205204);中國博士后科學(xué)基金(2013M531360)
龔建石(1966—),男,江蘇南通人,工程師,主要從事機(jī)械設(shè)計及制造方面的研究。
王洪亮副教授。E-mail:whl@njust.edu.cn
U463.52+
A
龔建石,賈天樂,田達(dá)笠,等.氣壓式EPB試驗臺設(shè)計與實驗[J].河北科技大學(xué)學(xué)報,2017,38(1):13-18.GONGJianshi,JIATianle,TIANDali,etal.DesignandexperimentofpneumaticEPBtestplatform[J].JournalofHebeiUniversityofScienceandTechnology,2017,38(1):13-18.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
