基于探測空間的輔助泊車系統檢測方法
2017-03-09 02:45:14崔曉川劉文營鄒博維
中國測試 2017年2期
崔曉川,劉文營,鄒博維
(中國汽車技術研究中心,天津 300300)
基于探測空間的輔助泊車系統檢測方法
崔曉川,劉文營,鄒博維
(中國汽車技術研究中心,天津 300300)
該文提出一種基于探測靜止車輛之間空隙作為目標停車位的輔助泊車系統的檢測方法,旨在為評價該類型輔助泊車系統打下基礎。輔助泊車系統檢測方法的提出,有助于汽車檢測領域能力的完善,規范系統生產商的設計,為消費者在購買汽車時提供技術支持。通過設計目標樣車充氣模型、搭建典型的垂直停車位和平行停車位作為實驗目標場景,采用高精度慣性導航系統對試驗中車輛的相互位置關系進行實時測量,最終利用實車系統驗證該方法的可行性。經過大量實驗驗證及數據處理,結果表明:該方法能夠對基于探測靜止車輛之間空隙作為目標停車位的輔助泊車系統進行檢測驗證試驗,適用于所有乘用車車型的檢測,操作方便可行,結果便于評價。
汽車智能化;輔助泊車系統;探測空間;檢測方法
0 引 言
隨著科技的進步,汽車傳感技術逐漸成熟,汽車消費者對汽車智能化也提出了更多的要求。輔助泊車系統是由非接觸式傳感器和相應的轉向控制單元組成,系統激活后通過非接觸傳感器獲取車輛周圍的環境信息,實時規劃停車路徑并對車輛進行相應的側向控制,輔助駕駛員泊車入位[1]。針對目前城市停車難、停車位狹小、新駕駛員數量增多的現實狀況[2],輔助泊車系統的價值逐漸顯現出來。隨著輔助泊車系統性能的不斷提升,新駕駛員停車入位的難度將不斷降低,停車事故率降低,進而不斷提升汽車的自動化與智能化,為智能汽車的實現打下基礎[3-9]。
目前,中國汽車安全技術主要來源于世界著名品牌企業與各大零部件商所帶來的成果。作為汽車安全技術的一個具體產物,輔助泊車系統的成熟產品也大部分是由博士、奧托立夫、德爾福等企業所研制開發。國內在該領域的研究起步較晚,但目前國內各大高校和高科技企業對輔助泊車系統的研究也取得了豐厚的成果[10]。至今輔助泊車技術已經基本成熟,產品的性能和穩定性已經達到了民用的程度,今后配有輔助泊車系統的商品車型將越來越多。但是,目前國內尚沒有一個明確的檢測方法對輔助泊車系統進行系統檢定和評價,本文意在提出一種檢測輔助泊車系統的方法,填補國內該領域檢測方法的空白。
輔助泊車系統按探測原理可以分為兩種:1)以探測靜止車輛之間空隙作為目標停車位識別方式的系統;2)以探測噴涂在地面上的停車位線為識別目標的系統。針對識別停車位線的系統而言,系統只要輔助駕駛員將車輛停入規定停車位內即可,故系統可靠性比較容易判斷。而針對探測靜止車輛之間空隙作為目標停車位識別方式的系統,檢測系統可靠性時容易造成車輛碰撞的危險,故本文提出一種基于探測空間的輔助泊車系統的檢測方法,并通過實驗驗證該方法的可行性。該方法的提出有助于今后對該類系統進行直觀有效的評價,對消費者起到相關的指導作用,同時也為今后的CNCAP擴充新領域新技術打下基礎。
1 輔助泊車系統
1.1 輔助泊車系統原理
輔助泊車系統是一種能夠快速、安全地使車輛自動駛入泊車位置的智能系統,它通過超聲波雷達以及圖像傳感器識別停車位,生成相應的行車軌跡后控制車輛的方向盤轉向進而實現泊車功能。其系統工作原理遵循下述車輛運動學模型[11-12]:

式中:θ——車軸與水平方向的夾角;
V——車輛的運動速度;
L——軸距;
ω——車輛前輪與車軸的夾角;
x——后軸中心點橫坐標;
y——后軸中心點縱坐標。
1.2 基于探測空間的輔助泊車系統工作流程
基于探測空間的輔助泊車系統工作前需要駕駛員手動選擇停車位的方式:平行停車位或者垂直停車位。輔助泊車系統激活以后車輛以較低的速度直線行駛,此時非接觸式測距傳感器探測車輛周圍的環境信息,系統通過探測到的位置信息判斷是否有合適的空間能夠作為停車位進行泊車入位,在探測出停車位后,系統提示駕駛員找到合適的停車位,駕駛員將車輛停下并按交互界面提示的檔位進行換擋操作,輔助泊車系統根據車輛與靜止車輛的位置關系以及探測出來的空間停車位的大小自動規劃泊車路徑軌跡,在泊車入位過程中,系統控制車輛的轉向機構并在必要時給駕駛員提示信息,停車操作完成后,系統將提示駕駛員泊車操作已結束。此類輔助泊車系統在工作的過程中,駕駛員需要對車輛的速度以及檔位的選擇進行控制,當車速超過系統設定閾值或者車輛與靜止車輛或障礙物距離小于系統設定閾值時,輔助泊車功能自動退出,將駕駛權轉交給駕駛員。系統的工作示意圖如圖1所示。
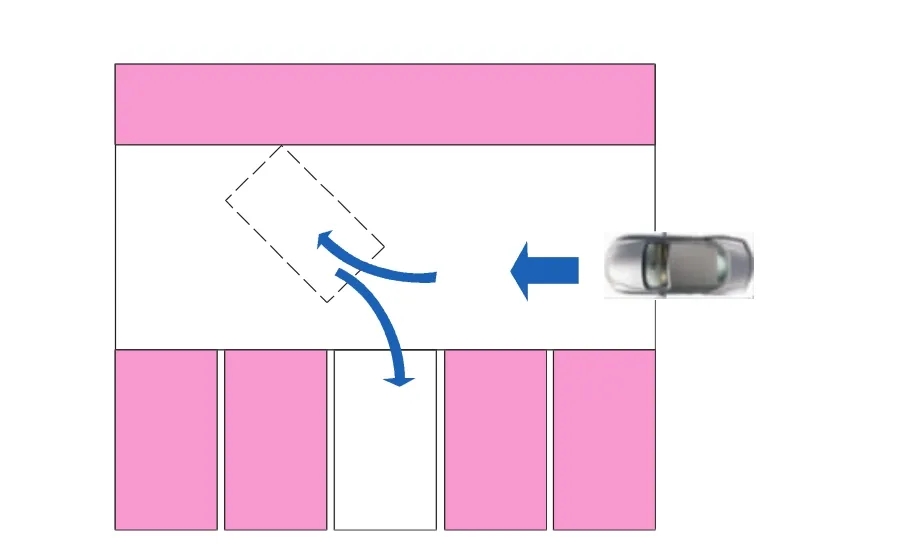
圖1 基于探測空間的輔助泊車系統工作示意圖
1.3 基于探測空間的輔助泊車系統提示信息要求
基于上述系統工作原理及工作流程可知探測空間的輔助泊車系統屬于人機交互的智能系統,故檢測該類型系統時,需要查看系統是否給駕駛員必要的操作提示,此提示可以是聲信號也可以是光信號。本文提出的基于探測空間的輔助泊車系統檢測方法中作為最低的要求,系統在釋放自動轉向、完成輔助泊車或者輔助泊車過程中系統中斷泊車操作時,應該向駕駛員發出必要的聲信號。其次在發現合適空間可以作為停車位、提示駕駛員換擋或者在泊車過程中發現障礙物時可以給駕駛員必要的聲或者光信號。
2 實驗場景搭建
目前標準的停車位有兩種:平行停車位、垂直停車位。基于探測空間的輔助泊車系統應該能夠探測上述兩種類型停車位。由于基于探測空間的輔助泊車系統需要探測靜止車輛之間的空隙作為停車位,一旦系統失效,擺放實車搭建實驗場景會造成碰撞的危險。故需要設計假車模型代替實車搭建平行停車位和垂直停車位實驗場景。
設計兩輛充氣假車模型,分別模擬三廂乘用車和兩廂乘用車。三廂乘用車模型尺寸:4.2m×1.5m× 1.11m;兩廂乘用車模型尺寸:3.905m×1.6m×1.27m。兩輛假車模型內部用充氣柱做支撐,外部車衣采用堅固結實的蒙皮制成,其雷達反射特性與真實車輛基本一致。充氣假車模型實物圖如圖2所示。實驗前需利用氣泵將其充氣,實驗完畢后放氣,折疊整理后便于搬運,易于多次反復實驗。

圖2 充氣假車模型實物圖
2.1 平行停車位實驗場景
平行停車位區域是受兩輛靜止車輛和一個可選擇的側向路邊作為主要限制,兩輛靜止車輛在同一方向平行于正常行駛路線整齊擺放而形成的停車位空間。此類停車位區域長度x設定為被測車輛長度加上Δx(被測車輛長度小于4m時,Δx取1m;被測車輛長度大于6m時,Δx取1.5m;被測車輛長度介于4m和6m之間時,Δx取被測車輛長度×0.25),寬度設定為被測車輛寬度加上0.2m。有側向路邊的場景下,靜止車輛以一個固定的距離平行于路邊擺放;沒有側向路邊的場景下,兩輛靜止車輛側向外邊界的連接線在地面上的投影作為實際的參考線。平行停車位實驗場景示意圖如圖3所示。

圖3 平行停車位實驗場景示意圖
2.2 垂直停車位實驗場景
垂直停車位區域是受兩輛靜止車輛在同一方向垂直于正常行駛路線整齊擺放而形成的停車位空間。此類停車位區域寬度設定為被測車輛寬度加上1.2m,深度設定為被測車輛的長度。垂直停車位實驗場景示意圖如圖4所示。

圖4 垂直停車位實驗場景示意圖
3 系統性能要求及檢測方法
3.1 系統性能要求
不同零部件生產商針對基于探測空間的輔助泊車系統的設計參數均不同,但是應該設定一個最低的系統性能要求,便于汽車消費者對該輔助泊車系統有一個共性的認識。本文介紹的檢測方法對此類輔助泊車系統提出一個最低的性能要求,用以檢驗測量時的一般性檢查。系統說明書中應明確說明車輛搜索停車位時的速度閾值(針對平行停車位此速度閾值設定為不大于30km/h,針對垂直停車位此速度閾值設定為不大于20 km/h),搜索停車位時應該以直線行駛路徑進行搜索,被測車輛與靜止車輛的橫向凈距離(不考慮后視鏡)設定為0.5~1.5m,被測車輛中分面與靜止車輛邊界線的最大角度設定為5°。停車過程中車速應小于設定的速度閾值(該閾值應設為5~12km/h),一旦速度超過該速度閾值后,輔助泊車功能將自動終止退出。
3.2 平行停車位系統檢測方法
利用設計的充氣假車模型,搭建平行停車位場景,按照被測車輛附帶的系統說明書操作被測的輔助泊車系統,選擇平行停車位模式進行輔助泊車系統檢測。在搜索車位、發現車位、輔助泊車過程及輔助泊車結束或者遇到錯誤終止各個階段應該有相應的提示信息,至少滿足本文1.3所述的最低要求。在輔助泊車整個過程中對輔助泊車系統進行一般檢查,系統應該滿足本文3.1所述的系統性能的最低要求。
輔助泊車結束后,應對車輛位置進行測量。被測車輛前輪和后輪最外側分別與側向路邊的距離應該在0.05~0.3m之間;對于沒有側向路邊的場景,被測車輛前輪和后輪最外側分別與兩輛靜止車輛側向外邊界的連接線在地面上的投影的距離應該在±0.3m之間(負值代表靜止車輛內側方向,正值代表靜止車輛外側方向);被測車輛中分面與側向路邊或者兩輛靜止車輛側向外邊界的連接線在地面上的投影所成的夾角應該在±3°之間(正值代表逆時針夾角,負值代表順時針夾角)。實驗場景圖如圖5所示。

圖5 平行停車位系統檢測方法實驗場景圖
進行10次實驗有9次滿足上述所有條件的輔助泊車系統可以判定為針對平行停車位場景而言合格的基于探測空間的輔助泊車系統。
3.3 垂直停車位系統檢測方法
利用設計的充氣假車模型,搭建垂直停車位場景,按照被測車輛附帶的系統說明書操作被測的輔助泊車系統,選擇垂直停車位模式進行輔助泊車系統檢測。在搜索車位、發現車位、輔助泊車過程及輔助泊車結束或者遇到錯誤終止各個階段應該有相應的提示信息,至少滿足本文1.3所述的最低要求。在輔助泊車整個過程中對輔助泊車系統進行一般檢查,系統應該滿足本文3.1所述的系統性能的最低要求。
輔助泊車結束后,應對車輛位置進行測量。定義一個符合的泊車停止區域,其形狀為一個矩形,具體定義如下:直線1為平行于左側靜止車輛右邊界線(不包括后視鏡)距離0.3m的一條直線;直線2為平行于右側靜止車輛左邊界線(不包括后視鏡)距離0.3m;直線3和直線4分別平行于兩靜止車輛前后邊界線距離0.4m。上述4條直線所圍成的區域即為定義的符合輔助泊車系統完成泊車后的停止區域,示意圖如圖6所示。輔助泊車結束后,被測車輛應停在上述區域內,并且被測車輛中分面與該區域所成的夾角應在±3°之間。

圖6 垂直停車位場景下輔助泊車停止區域示意圖
進行10次實驗有9次滿足上述所有條件的輔助泊車系統可以判定為針對垂直停車位場景而言合格的基于探測空間的輔助泊車系統。
4 實驗驗證
按照本文所述的兩種實驗場景(平行停車位和垂直停車位)分別進行實車實驗,記錄每次實驗后被測車輛前輪和后輪與基準線的距離以及被測車輛中分面與規定區域的夾角。共進行3種場景的實驗:1)有側向路邊的平行停車位場景;2)沒有側向路邊的平行停車位場景;3)垂直停車位場景。實驗數據如表1~表3所示。
通過表1結果可以看出,除了第7次實驗中車輛右前輪距離側向路邊0.35 m,超出0.30 m的合格范圍外,其余所有實驗中車輪距側向路邊的距離均在0.05~0.30m之間,車身中線與側向路邊的夾角也均在±3°之間。10次實驗其中9次符合要求,可判定為滿足要求。

表1 有側向路邊的平行停車位場景實驗結果1)

表2 沒有側向路邊的平行停車位場景實驗結果1)

表3 垂直停車位場景實驗結果1)
通過表2結果可以看出,所有實驗中車輪距兩輛靜止車輛側向外邊界的連接線在地面上的投影的距離均在±0.30m之間,車身中線與兩輛靜止車輛側向外邊界的連接線在地面上的投影的夾角也均在±3°之間。10次實驗均符合要求,可判定為滿足要求。
通過表3結果可以看出,除了第6次實驗中車輛中分面與規定停車區域的夾角>3°,超出范圍外,其余所有實驗中前車輪距兩側靜止車輛均>0.3 m,后車輪距兩側靜止車輛均>0.4m,車輛中分面與規定停車區域的夾角均在±3°之間。10次實驗其中9次符合要求,可判定為滿足要求。
5 結束語
本文在研究輔助泊車系統的工作原理的基礎上提出了一種基于探測空間的輔助泊車系統的檢測方法。通過設計充氣假車模型建立平行停車位和垂直停車位兩種典型的實驗停車位場景,利用高精度慣性導航測量系統對試驗中車輛的位置信息進行實時測量,最終采集車輛停止后與目標的距離信息及角度信息。經過大量的實車驗證實驗表明:該檢測方法方便可行,便于評價,對不同供應商提供的輔助泊車系統均可適用。本文提出的基于探測空間的輔助泊車系統的檢測方法填補了目前國內對輔助泊車系統檢測方法的空白,為今后智能汽車的檢測檢驗標準的提出打下基礎。
[1]劇季,陳淑榮,孟飛.自動平行泊車技術綜述[J].湖北工程學院學報,2016,36(3):46-50.
[2]王芳成.自動平行泊車系統的研究[D].合肥:中國科學技術大學,2010.
[3]吳鍇.智能自動泊車系統研究[D].南京:南京理工大學,2008.
[4]奚碧清.汽車安全綜合評價模型研究[D].成都:西南交通大學,2014.
[5]祿盛,黃顯杭,蘇嶺,等.自動泊車系統模型研究與實車驗證[J].重慶郵電大學學報(自然科學版),2014,26(4):522-529.
[6]宋健,王偉瑋,李亮,等.汽車安全技術的研究現狀和展望[J].汽車安全與節能學報,2010,1(2):98-106.
[7]華一丁,江浩斌,馬世典,等.基于語音提示的輔助泊車系統控制器設計與試驗[J].汽車技術,2014(4):38-42.
[8]劉廣君.智能后視輔助泊車系統研究與設計[J].科技創新導報,2013(8):15-17.
[9]畢雁冰,唐婷婷.基于多傳感器信息融合的輔助泊車系統[J].四川兵工學報,2011,32(1):110-140.
[10]趙福全,吳成明,潘之杰,等.中國汽車安全技術的現狀與展望[J].汽車安全與節能學報,2011,2(2):111-121.
[11]孟繁微.車輛垂直泊車轉向控制算法研究[D].長春:吉林大學,2011.
[12]熊劍,余恭敏,郭杭,等.四輪車輛導航中的慣性/運動學模型組合方法[J].計算機仿真,2014,31(3):188-192.
(編輯:劉楊)
Detection method for auxiliary parking system based on detecting space
CUI Xiaochuan,LIU Wenying,ZOU Bowei
(China Automotive Technology&Research Center,Tianjin 300300,China)
Currently,there is no inspection and test method for auxiliary parking system in China. In this paper,a detection method of auxiliary parking system is proposed to detect the space between the stationary vehicles with the aim to lay a foundation for this type of auxiliary parking system.The proposed method will improve the test ability in automobile detection field,specify the design of the system manufacturers and provide technical support for consumers when purchasing vehicles.By designing inflatable model for sample vehicle and build classic vertical parking space and parallel parking space as the test target scene,real-time measurement can be carried out for the mutual position relation of testing vehicles based on high-precision inertial navigation system. Finally,the feasibility of the method is verified via real vehicle system.Based on extensive test verification and data processing,this method is capable of detecting,verifying and measuring the space between stationary vehicles for auxiliary parking system of target parking space.The test results show that the method is suitable for the detection of all passenger vehicle models,and the test is feasible and convenient for operation.Test results are easy to be evaluated.
automobile intellectualization;auxiliary parking system;detecting space;detecting method
A
:1674-5124(2017)02-0029-05
10.11857/j.issn.1674-5124.2017.02.006
2016-07-29;
:2016-09-03
崔曉川(1987-),男,天津市人,工程師,研究方向為整車性能、道路試驗、車輛主動安全與被動安全。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52
