四象限傳感器用于激光跟蹤儀光斑偏移量測(cè)量
2017-03-14 05:20:20陳洪芳譚志石照耀宋輝旭
哈爾濱工程大學(xué)學(xué)報(bào) 2017年2期
陳洪芳, 譚志, 石照耀, 宋輝旭
(北京工業(yè)大學(xué) 北京市精密測(cè)控技術(shù)與儀器工程技術(shù)研究中心,北京 100124)
四象限傳感器用于激光跟蹤儀光斑偏移量測(cè)量
陳洪芳, 譚志, 石照耀, 宋輝旭
(北京工業(yè)大學(xué) 北京市精密測(cè)控技術(shù)與儀器工程技術(shù)研究中心,北京 100124)
為了保證激光跟蹤儀的跟蹤速度和跟蹤精度,要求發(fā)現(xiàn)目標(biāo)靶鏡運(yùn)動(dòng)和反映靶鏡位移的四象限傳感器信號(hào)的處理過(guò)程具有快速、準(zhǔn)確的動(dòng)態(tài)響應(yīng)。推導(dǎo)出四象限傳感器在對(duì)角線算法中的輸出信號(hào)與光斑偏移量之間的關(guān)系為超越函數(shù)關(guān)系。針對(duì)超越函數(shù)關(guān)系不易快速解算的難題,結(jié)合激光光斑的特性,采用了泰勒級(jí)數(shù)展開(kāi)算法。使用高精度直角坐標(biāo)測(cè)量機(jī)對(duì)光斑偏移量測(cè)量系統(tǒng)進(jìn)行了驗(yàn)證實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果表明:該測(cè)量系統(tǒng)實(shí)時(shí)性好,每秒測(cè)量次數(shù)達(dá)到1 050次;測(cè)量精度高,在±400 μm測(cè)量范圍內(nèi)測(cè)量精度可達(dá)6 μm。該系統(tǒng)可以廣泛應(yīng)用于需要微小位移測(cè)量的相關(guān)領(lǐng)域。
激光跟蹤儀;四象限傳感器;光斑偏移量;泰勒級(jí)數(shù)展開(kāi);測(cè)量系統(tǒng)
激光跟蹤儀是一種高精度的便攜式三維坐標(biāo)測(cè)量設(shè)備,用于超大空間幾何量精密測(cè)量和動(dòng)態(tài)軌跡測(cè)量[1]。激光跟蹤儀的工作原理是在目標(biāo)點(diǎn)上安置一個(gè)靶鏡,激光跟蹤儀發(fā)出的測(cè)量光入射到靶鏡上,又返回到跟蹤儀。當(dāng)測(cè)量光入射到靶鏡的中心位置,則激光原路返回照射在四象限傳感器的中心;當(dāng)靶鏡移動(dòng),激光偏離靶鏡中心時(shí),回到激光跟蹤儀的反射光會(huì)照射在四象限傳感器上偏離中心的位置,光斑偏離中心的距離即光斑偏移量。控制系統(tǒng)會(huì)根據(jù)光斑偏移量控制電機(jī)轉(zhuǎn)動(dòng)以調(diào)整光束方向直到光斑偏移量為零,實(shí)現(xiàn)對(duì)靶鏡的跟蹤[2-3]。光斑偏移量的高精度實(shí)時(shí)測(cè)量對(duì)于提高激光跟蹤儀的跟蹤精度具有重大的意義。根據(jù)四象限傳感器的工作原理,傳感器的輸出信號(hào)與光斑偏移量存在等量關(guān)系。但這種關(guān)系是非線性的超越函數(shù)關(guān)系,為解出光斑偏移量,常用的解算方法有查表法、迭代法和分段線性插值法等。查表法是非常直接、簡(jiǎn)單的方法,但對(duì)系統(tǒng)存儲(chǔ)空間要求較高。迭代法程序存儲(chǔ)量小,但迭代需要對(duì)反函數(shù)進(jìn)行多次計(jì)算,計(jì)算量較大,對(duì)于實(shí)時(shí)性要求較高的場(chǎng)合不適用,并且迭代次數(shù)越多計(jì)算結(jié)果的累積誤差越大[4]。分段線性插值法就是在小范圍內(nèi)用分段的直線去擬合曲線,并用直線段來(lái)代替曲線作近似處理的方法,這種方法在計(jì)算精度與分段范圍上很難平衡,而且分段越細(xì)運(yùn)算量越大[2]。
本文結(jié)合激光光斑的特性,提出了采用泰勒級(jí)數(shù)展開(kāi)算法解算光斑偏移量,并基于此設(shè)計(jì)了光斑偏移量測(cè)量系統(tǒng),進(jìn)行了相應(yīng)的驗(yàn)證實(shí)驗(yàn)。
1 光斑偏移量的測(cè)量原理
1.1 光斑偏移量的推導(dǎo)
四象限傳感器作為一種常用的位置敏感器件,當(dāng)入射光斑落在器件感光面的不同位置時(shí),四象限傳感器的每個(gè)象限輸出不同幅度的電流信號(hào),通過(guò)對(duì)這些信號(hào)的幅度進(jìn)行計(jì)算,可以確定入射光斑中心在感光面上的位置[5-6]。

圖1 四象限傳感器光斑幾何關(guān)系示意圖Fig.1 Quadrant photodiode geometry

(1)
根據(jù)極坐標(biāo)與直角坐標(biāo)的轉(zhuǎn)換公式:
(2)

(3)
由于四象限傳感器輸出光電流很小,要對(duì)每個(gè)象限的輸出信號(hào)進(jìn)行放大處理。設(shè)I1、I2、I3、I4表示按逆時(shí)針順序排列的4個(gè)象限的輸出光電流,U1、U2、U3、U4分別表示各路電流經(jīng)過(guò)放大后的輸出電壓值,則:
(4)
式中:β為4路放大電路的增益。
由四象限傳感器工作原理,四象限傳感器得到的電流信號(hào)與光斑投射在傳感器光敏面上的面積成正比,設(shè)比例系數(shù)為A,則式(4)表示為
(5)
式中:Sk是光斑在每個(gè)象限D(zhuǎn)k上的光照面積。
激光光斑沿系統(tǒng)坐標(biāo)系水平x方向的原始偏差信號(hào),也即光斑沿四象限傳感器坐標(biāo)系對(duì)角線m方向的原始偏差信號(hào)Em,可以由相對(duì)象限D(zhuǎn)1、D3上的光照面積求出:
(6)
同理,激光光斑沿豎直方向的原始偏差信號(hào),也即光斑沿四象限傳感器坐標(biāo)系對(duì)角線n方向的原始偏差信號(hào)En為
(7)
對(duì)兩個(gè)方向的原始偏差信號(hào)Em、En進(jìn)行歸一化處理得到KmEn:
(8)
每個(gè)象限的光照面積在極坐標(biāo)系下利用二重積分來(lái)計(jì)算,則第一象限D(zhuǎn)1的光照面積S1為
(9)
由式(3)得到極坐標(biāo)系下的l(t)為
(10)

(11)
(12)
進(jìn)行和差變換,得到四象限傳感器輸出信號(hào)與四象限傳感器坐標(biāo)系中的光斑偏移量的方程為
(13)
1.2 光斑偏移量的解算
由等式(13)可以看出,光斑偏移量的解算方程是超越函數(shù)方程,直接求解異常繁鎖,采用下述方式給予解決:
在激光跟蹤儀工作過(guò)程中,由于光斑中心離開(kāi)坐標(biāo)原點(diǎn)的距離X、Y均遠(yuǎn)小于光斑的半徑r,對(duì)式(13)取一級(jí)近似得到:
(14)
(15)
式(15)是兩個(gè)關(guān)于ΔX、ΔY的一元二次方程,利用求根公式求出光斑中心坐標(biāo)的修正值(ΔX、ΔY)。把光斑中心坐標(biāo)的近似值(X0,Y0)與修正值(ΔX、ΔY)相加,得到光斑中心在當(dāng)前位置四象限傳感器坐標(biāo)系中的準(zhǔn)確坐標(biāo)(X,Y)。
轉(zhuǎn)換四象限傳感器坐標(biāo)系xoy下的光斑中心坐標(biāo)到系統(tǒng)坐標(biāo)系mon下,如圖1所示,兩個(gè)坐標(biāo)系間的夾角是45°,根據(jù)坐標(biāo)變換公式,光斑中心在系統(tǒng)坐標(biāo)系mon中的坐標(biāo)表達(dá)式為
(16)
最后,根據(jù)式(16)得到光斑在當(dāng)前位置系統(tǒng)坐標(biāo)系中水平和垂直方向上準(zhǔn)確的偏移量M和N,進(jìn)而控制偏擺和俯仰方向的電機(jī)準(zhǔn)確進(jìn)行跟蹤。
2 光斑偏移量測(cè)量系統(tǒng)設(shè)計(jì)
激光跟蹤儀的工作過(guò)程是一個(gè)隨動(dòng)過(guò)程,目標(biāo)靶鏡運(yùn)動(dòng)不規(guī)則,速度變化范圍較大,尤其是在靶鏡運(yùn)動(dòng)的加速和減速階段及靶鏡高速運(yùn)動(dòng)時(shí),對(duì)跟蹤控制機(jī)構(gòu)的動(dòng)態(tài)性能要求較高[9]。這就要求發(fā)現(xiàn)靶鏡運(yùn)動(dòng)和反映靶鏡位移的四象限傳感器的信號(hào)處理電路具有快速、準(zhǔn)確的動(dòng)態(tài)響應(yīng)[10]。因此,設(shè)計(jì)了以STC15F2K60S2芯片為核心的抗干擾性能優(yōu)越的數(shù)字信號(hào)處理電路。整個(gè)系統(tǒng)的硬件結(jié)構(gòu)框圖如圖2所示。
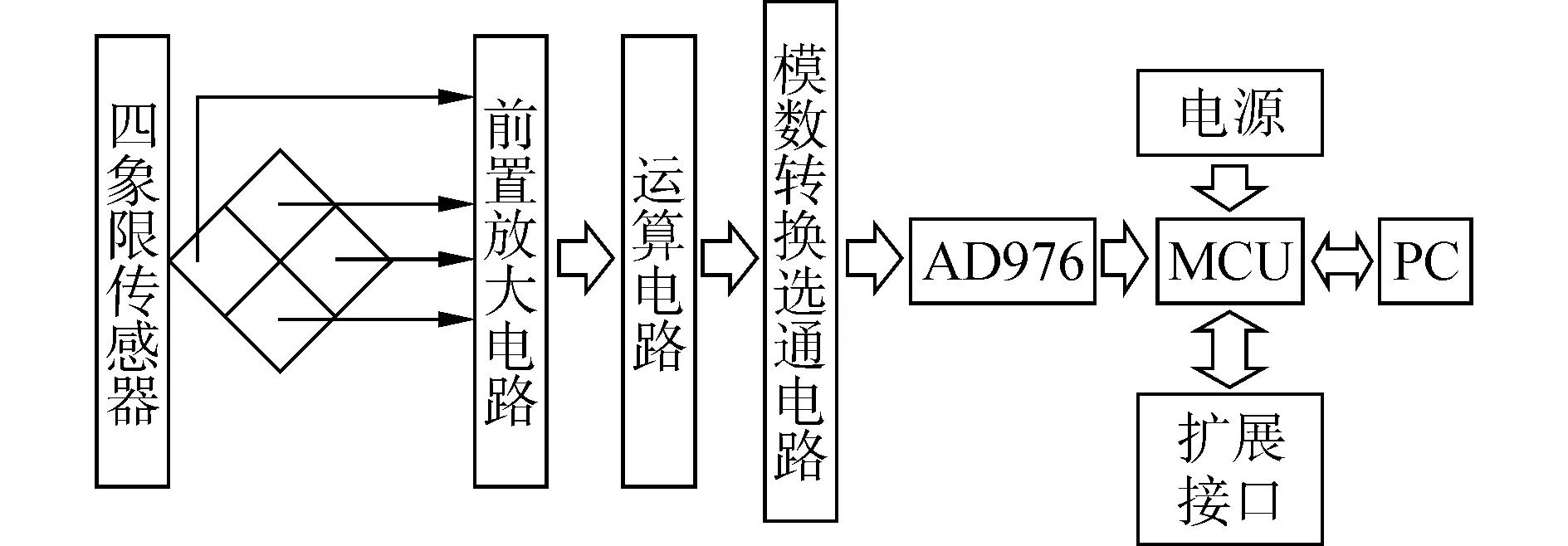
圖2 光斑偏移量測(cè)量系統(tǒng)框圖Fig.2 Block diagram of spot offset measurement system
激光照射在四象限傳感器表面,傳感器會(huì)輸出四路與光能大小相關(guān)的弱電流信號(hào),經(jīng)I/V轉(zhuǎn)換、放大濾波后,將信號(hào)調(diào)理為-10~+10 V的標(biāo)準(zhǔn)信號(hào),送入16位模數(shù)轉(zhuǎn)換器AD976進(jìn)行模數(shù)轉(zhuǎn)換。處理器通過(guò)對(duì)數(shù)字量的分析計(jì)算得到光斑偏移量信息,并將偏移量數(shù)據(jù)發(fā)送至上位機(jī)進(jìn)行實(shí)時(shí)顯示。
為提高程序的可讀性和可維護(hù)性,軟件設(shè)計(jì)采用自頂向下、模塊化設(shè)計(jì)的思想。程序主要包括AD976采集模塊、定時(shí)器延時(shí)模塊、平均濾波模塊、光斑偏移量計(jì)算模塊以及串口發(fā)送模塊等。
在Keil uVision4中對(duì)光斑偏移量測(cè)量進(jìn)行仿真,完成一次光斑偏移量的測(cè)量需要0.000 951 56 s,即一秒鐘可以測(cè)量1 050次光斑偏移量,達(dá)到了對(duì)光斑偏移量的實(shí)時(shí)測(cè)量。軟件設(shè)計(jì)主程序流程圖如圖3所示。
3 驗(yàn)證實(shí)驗(yàn)及數(shù)據(jù)分析
為了測(cè)試基于文中所提出算法的光斑偏移量測(cè)量系統(tǒng),在FormFree300上完成了相關(guān)實(shí)驗(yàn),并對(duì)實(shí)驗(yàn)數(shù)據(jù)進(jìn)行了分析[11-12]。實(shí)驗(yàn)所用的光源為德國(guó)SIOS Me?technik GmbH公司的激光干涉儀,其經(jīng)過(guò)耦合的輸出功率大約800 μW左右,激光光斑直徑為2 mm。FormFree300是一臺(tái)高精度的柱式直角坐標(biāo)測(cè)量機(jī),它的測(cè)量工作平臺(tái)通過(guò)氣浮裝置安裝在基座平面上,并通過(guò)H型機(jī)構(gòu)導(dǎo)向?qū)崿F(xiàn)X方向和Y方向的直線運(yùn)動(dòng),其中X軸的定位精度經(jīng)過(guò)調(diào)試達(dá)到0.717 μm,Y軸的定位精度為2.451 μm。四象限傳感器采用的是日本濱松公司的S5980。實(shí)驗(yàn)裝置如圖4所示。
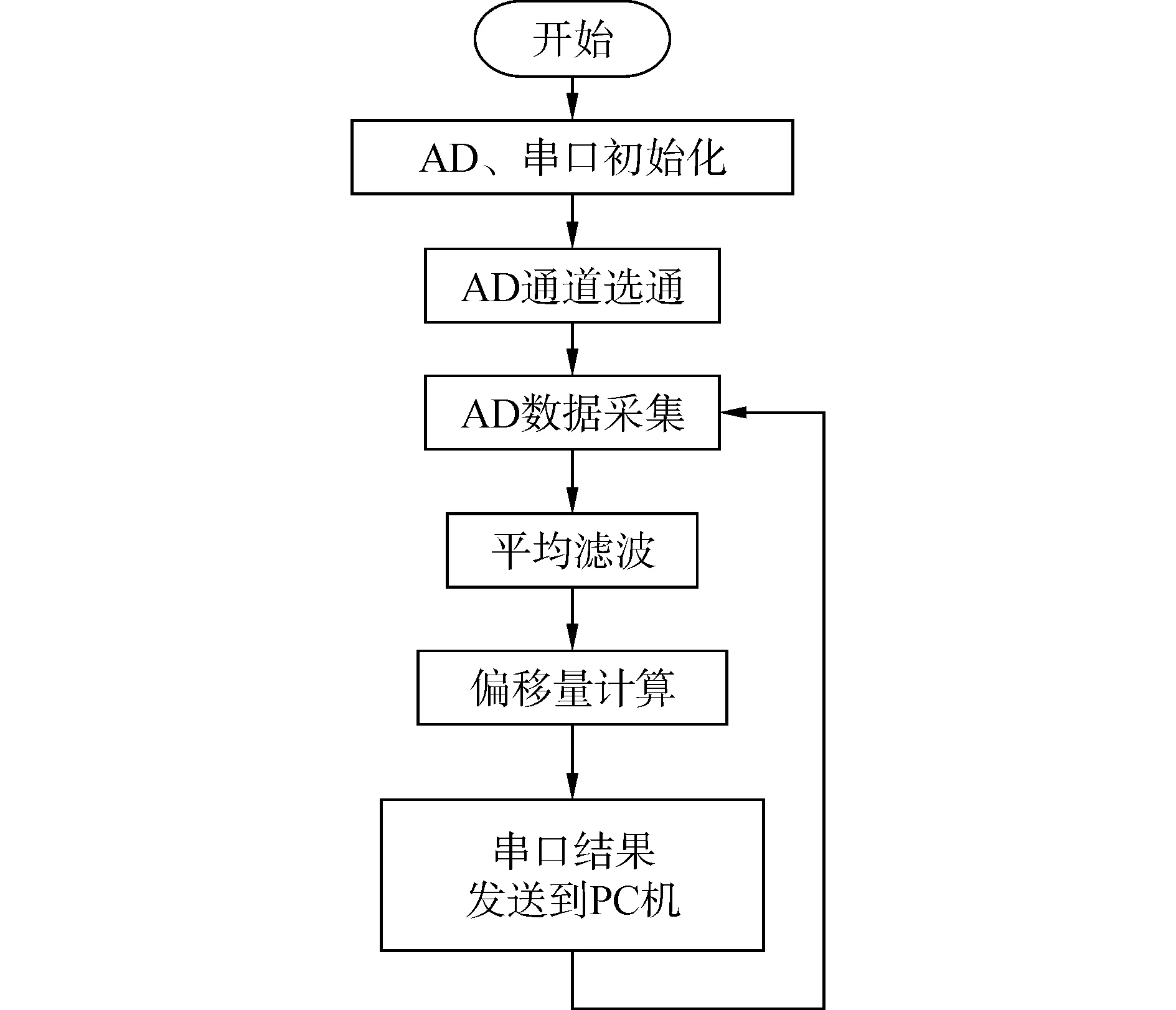
圖3 主程序流程圖Fig.3 Flow chart of main program
把SIOS激光干涉儀固定在三角架上,四象限傳感器固定在Formfree300的測(cè)量工作臺(tái)上。然后垂直方向上調(diào)節(jié)三角架,水平方向上調(diào)節(jié)氣浮平臺(tái),讓四象限傳感器輸出的偏差信號(hào)為零,此時(shí)激光光斑位于四象限傳感器中心。保持SIOS激光干涉儀不動(dòng),控制Formfree300X軸上的氣浮平臺(tái)從中心位置向兩邊以50 μm為步距各移動(dòng)10次,同時(shí)上位機(jī)接收處理器輸出的傳感器信號(hào)和光斑偏移量數(shù)據(jù)。每個(gè)位置下四象限傳感器輸出偏差信號(hào)Km、Kn,及根據(jù)偏差信號(hào)求出的光斑偏移量如表1所示。

圖4 實(shí)驗(yàn)裝置圖Fig.4 Experimental equipment

平臺(tái)位移/μmKmKn光斑偏移量/μm平臺(tái)位移/μmKmKn光斑偏移量/μm-500-0.5631-0.0113-493.6190500.0659-0.001252.7490-450-0.5246-0.0130-441.54101000.13210.005799.6080-400-0.4751-0.0080-392.89401500.19730.0085149.4320-350-0.4248-0.0070-344.62802000.25050.0072193.6450-300-0.3736-0.0064-298.58702500.31300.0063246.3410-250-0.3167-0.0047-250.82803000.37450.0048300.8030-200-0.2590-0.0049-202.51003500.42520.0050346.8860-150-0.1969-0.0056-151.44304000.47560.0056395.8840-100-0.1330-0.0030-102.46604500.52300.0030451.5820-50-0.0656-0.0013-50.54405000.56590.0013513.161000.0007-0.00232.3560
同時(shí)把計(jì)算過(guò)程中的系統(tǒng)坐標(biāo)系下偏移量近似值與偏移量修正值繪制如圖5所示的曲線圖。把平臺(tái)位移量與系統(tǒng)坐標(biāo)系下光斑偏移量間的誤差繪制如圖6所示曲線圖。在圖5中,通過(guò)泰勒級(jí)數(shù)展開(kāi)求出的光斑偏移量修正值對(duì)根據(jù)光斑特性求出的偏移量估計(jì)值有修正作用,使其能很快接近真實(shí)的光斑偏移量。結(jié)合誤差曲線圖6,距離傳感器的中心的距離越近,測(cè)量誤差越小;距離傳感器中心的距離越遠(yuǎn),測(cè)量誤差越大。在±400 μm的范圍內(nèi),測(cè)量誤差在6 μm;在±500 μm的范圍內(nèi),測(cè)量誤差在13.2 μm以內(nèi)。
在通常情況下,隨著背景光所占比例的增大,四象限傳感器的檢測(cè)范圍有所降低,檢測(cè)靈敏度也有一定程度的降低[13]。根據(jù)式(8),背景光的存在,使得分母上的S1+S2+S3+S4在很大程度上增加了,但是對(duì)于分子上的S1-S3和S2-S4幾乎沒(méi)有影響,這就使得Km和Kn在一定程度上減小,從而降低了量程范圍。在±400μm以外的范圍,測(cè)量誤差突然增大是因?yàn)檫@一區(qū)域在四象限傳感器線性區(qū)域的邊緣[14],超出了傳感器測(cè)量范圍。

圖5 計(jì)算出的偏移量、偏移量近似值、偏移量修正值Fig.5 Curve of offset calculated, approximate value of offset and correction value of offset

圖6 平臺(tái)位移與計(jì)算出光斑偏移量間的誤差曲線圖Fig.6 Error curve between displacement of platform and spot offset
4 結(jié)論
1)采用泰勒級(jí)數(shù)展開(kāi)算法可以解算四象限傳感器輸出信號(hào)與光斑偏移量之間準(zhǔn)確的等量關(guān)系;
2)通過(guò)搭建用于激光跟蹤的光斑偏移量測(cè)量系統(tǒng)進(jìn)行實(shí)驗(yàn),表明該測(cè)量系統(tǒng)測(cè)量速度快、測(cè)量精度高。
[1]ZHOU Guofeng, LI Xiaoxing, LI Dongsheng, et al. Large-scale compact range on-site alignment based on laser tracker measurement network[J]. Measurement, 2015, 68: 143-154.
[2]周培松, 盧榮勝, 周維虎, 等. 四象限探測(cè)器用于激光跟蹤儀目標(biāo)脫靶量測(cè)量[J]. 光電技術(shù)應(yīng)用, 2014, 29(1): 75-79.
ZHOU Peisong, LU Rongsheng, ZHOU Weihu, et al. Measurement system for laser tracker′s target-missing quantity based on four-quadrant detector[J]. Electro-optic technology application, 2014, 29(1): 75-79.
[3]ACERO R, BRAU A, SANTOLARIA J, et al. Verification of an articulated arm coordinate measuring machine using a laser tracker as reference equipment and an indexed metrology platform[J]. Measurement, 2015, 69: 52-63.
[4]郭紹忠, 許瑾晨, 陳建勛. 一種改進(jìn)的超越函數(shù)通用算法[J]. 計(jì)算機(jī)工程, 2012, 38(15): 31-34. GUO Shaozhong, XU Jinchen, CHEN Jianxun. Improved transcendental function general algorithm[J]. Computer engineering, 2012, 38(15): 31-34.
[6]LU Chao, ZHAI Yusheng, WANG Xinjie, et al. A novel method to improve detecting sensitivity of quadrant detector[J]. Optik-international journal for light and electron optics, 2014, 125(14): 3519-3523.
[7]HAO Xiang, KUANG Cuifang, KU Yulong, et al. A quadrant detector based laser alignment method with higher sensitivity[J]. Optik-international journal for light and electron optics, 2012, 123(24): 2238-2240.
[8]余峰, 何燁, 李松, 等. 四象限光電檢測(cè)系統(tǒng)的定位算法研究及改進(jìn)[J]. 應(yīng)用光學(xué), 2008, 29(4): 493-497. YU Feng, HE Ye, LI Song, et al. Improvement of positioning algorithm for four-quadrant optoelectronic detection system[J]. Journal of applied optics, 2008, 29(4): 493-497.
[9]王為農(nóng), 蘇永昌, 任國(guó)營(yíng). 激光跟蹤儀的動(dòng)態(tài)特性研究[J]. 計(jì)量學(xué)報(bào), 2007, 28(1): 34-36, 92. WANG Weinong, SU Yongchang, REN Guoying. A study on dynamic character of laser tracker[J]. Acta metrologica sinica, 2007, 28(1): 34-36, 92.
[10]YAN Z S, LIN Wenhan, LIU C H. Measurement of the thermal elongation of high speed spindles in real time using a cat's eye reflector based optical sensor[J]. Sensors and actuators a: physical, 2015, 221: 154-160.
[11]LEE H W, CHEN C L, LIU C H. Development of an optical three-dimensional laser tracker using dual modulated laser diodes and a signal detector[J]. Review of scientific instruments, 2011, 82(3): 035101.
[12]MISSOFFE A, CHASSAGNE L, TOP?U S, et al. New simple optical sensor: From nanometer resolution to centimeter displacement range[J]. Sensors and actuators A: physical, 2012, 176: 46-52.
[13]陳琳. 影響四象限探測(cè)器探測(cè)結(jié)果的若干因素的研究[J]. 儀器儀表用戶, 2010, 17(4): 56-57. CHEN Lin. Studies processes in the result of QD detection[J]. Electronic instrumentation customers, 2010, 17(4): 56-57.
[14]ZHANG Leihong, YANG Yan, XIA Wenbing, et al. Linearity of quadrant avalanche photodiode in laser tracking system[J]. Chinese optics letters, 2009, 7(8): 728-731.
Use of a quadrant photodiode to measure spot offset of a laser tracker
CHEN Hongfang, TAN Zhi, SHI Zhaoyao, SONG Huixu
(Beijing Engineering Research Center of Precision Measurement Technology and Instruments, Beijing University of Technology,Beijing 100124,China)
Signal processing in a quadrant photodiode used to track target movement velocity and reflect target displacement must provide rapid and accurate dynamic response for a laser tracker . According to the operation principle of a quadrant photodiode, we derived the relationship between the output signal and the spot offset using a diagonal algorithm for the transcendental function. Considering that it is not easy to solve the transcendental function, in combination with the laser spot characteristics, a Taylor series expansion algorithm was adopted. A verification experiment for the spot offset measurement system was performed using a high-precision rectangular coordinate measuring machine. The results show that the system possesses a fast measurement speed and high measurement accuracy. The measurement can reach 1 050 times per second, and the accuracy is 6 μm within a measurement range of ±400 μm. The system can be widely applied in related fields in which a microdisplacement measurement is necessary.
laser tracker; quadrant photodiode; spot offset; Taylor series expansion; measurement system
2015-10-13.
日期:2015-11-14.
國(guó)家重大科學(xué)儀器設(shè)備開(kāi)發(fā)專項(xiàng)(2013YQ17053904).
陳洪芳(1980-),女,副教授.
陳洪芳,E-mail:hfchen@bjut.edu.cn.
10.11990/jheu.201510024
http://www.cnki.net/kcms/detail/23.1390.u.20161114.1036.004.html
TH702
A
1006-7043(2017)02-0258-05
陳洪芳, 譚志, 石照耀, 等. 四象限傳感器用于激光跟蹤儀光斑偏移量測(cè)量[J]. 哈爾濱工程大學(xué)學(xué)報(bào), 2017, 38(2): 258-262. CHEN Hongfang, TAN Zhi, SHI Zhaoyao, et al. Use of a quadrant photodiode to measure spot offset of a laser tracker [J]. Journal of Harbin Engineering University, 2017, 38(2): 258-262.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
