三相12/8極開關(guān)磁阻電機(jī)驅(qū)動(dòng)系統(tǒng)建模與仿真
2017-03-16 18:52:31王智杰蔡燕姜文濤
科技創(chuàng)新與應(yīng)用 2017年5期
王智杰 蔡燕 姜文濤
摘 要:開關(guān)磁阻電機(jī)(Switched Reluctance Motor,簡稱SRM)的特殊非線性結(jié)構(gòu)使其設(shè)計(jì)和分析十分困難,因此準(zhǔn)確的建模和仿真對開關(guān)磁阻電機(jī)的研究很有必要。文章利用MATLAB/Simulink仿真軟件,采用模塊化的思想對一臺三相12/8極開關(guān)磁阻電機(jī)驅(qū)動(dòng)系統(tǒng)(簡稱SRD)進(jìn)行了整體建模。仿真得到的波形驗(yàn)證了搭建的仿真模型的正確性,該模型為進(jìn)行開關(guān)磁阻電機(jī)的優(yōu)化控制研究創(chuàng)造了條件。
關(guān)鍵詞:開關(guān)磁阻電機(jī)驅(qū)動(dòng)系統(tǒng);MATLAB建模仿真;優(yōu)化控制
1 概述
開關(guān)磁阻電機(jī)(SRM)定子和轉(zhuǎn)子都是凸極形狀,且都是由高磁導(dǎo)率的硅鋼片堆疊而成,只在定子磁極上安裝有集中繞組,轉(zhuǎn)子上既沒有繞組也沒有永磁體[1]。與其他電機(jī)相比,其結(jié)構(gòu)簡單牢固、成本低、調(diào)速范圍寬、控制靈活等優(yōu)勢十分突出,因此在需要調(diào)速和高效率的場合得到了廣泛應(yīng)用[2]。但是雙凸極的結(jié)構(gòu)也帶來了磁路飽和、渦流、磁滯效應(yīng)等一系列的非線性特性,嚴(yán)重影響了開關(guān)磁阻電機(jī)的運(yùn)行性能,并且使開關(guān)磁阻電機(jī)的具體分析研究十分困難。為了準(zhǔn)確研究開關(guān)磁阻電機(jī)的特性,必須對開關(guān)磁阻電機(jī)進(jìn)行建模仿真。文章基于MATLAB/Simulink仿真系統(tǒng)對三相12/8極開關(guān)磁阻電機(jī)的驅(qū)動(dòng)系統(tǒng)進(jìn)行了整體建模仿真研究,將組成系統(tǒng)的開關(guān)磁阻電機(jī)(SRM)、功率變換器、控制器和位置檢測器四部分模塊化,對整個(gè)系統(tǒng)采用轉(zhuǎn)速、電流雙閉環(huán)控制方法。仿真結(jié)果驗(yàn)證了搭建模型的正確性。文章的模型具有參數(shù)修改方便,通用性強(qiáng),適用于開關(guān)磁阻電機(jī)各種運(yùn)行模式的特點(diǎn),為開關(guān)磁阻電機(jī)及其驅(qū)動(dòng)系統(tǒng)的優(yōu)化控制研究創(chuàng)造了條件。
2 基于Matlab的SRD仿真模型的建立
文章在Matlab/Simulink環(huán)境中,利用軟件自帶的豐富模塊庫,在分析了開關(guān)磁阻電機(jī)非線性模型的基礎(chǔ)上,搭建出了SRD仿真模型。
系統(tǒng)采用轉(zhuǎn)速、電流雙閉環(huán)的控制方法,其中轉(zhuǎn)速外環(huán)采用PI調(diào)節(jié)控制,電流環(huán)內(nèi)環(huán)采用低速時(shí)的電流斬波和高速時(shí)的角度位置控制方式。整個(gè)SRD包括電機(jī)本體模塊、功率變換器模塊、控制器模塊和位置檢測器模塊四部分,通過各個(gè)模塊的協(xié)調(diào)配合,實(shí)現(xiàn)開關(guān)磁阻電機(jī)的穩(wěn)定運(yùn)行。
3 仿真結(jié)果
基于建立的開關(guān)磁阻電機(jī)驅(qū)動(dòng)系統(tǒng)模型進(jìn)行仿真,設(shè)定直流母線電壓為513V,最大電感為140mH,最小電感為20mH,每相繞組電阻為1.1Ω,轉(zhuǎn)動(dòng)慣量為0.02kg·m2,摩擦系數(shù)為0.001N.ms,將定子凸極和轉(zhuǎn)子凸極對齊的位置定義為0°。可以得到不同條件下電機(jī)運(yùn)轉(zhuǎn)時(shí)的電流、電壓、轉(zhuǎn)矩、轉(zhuǎn)速的仿真波形。
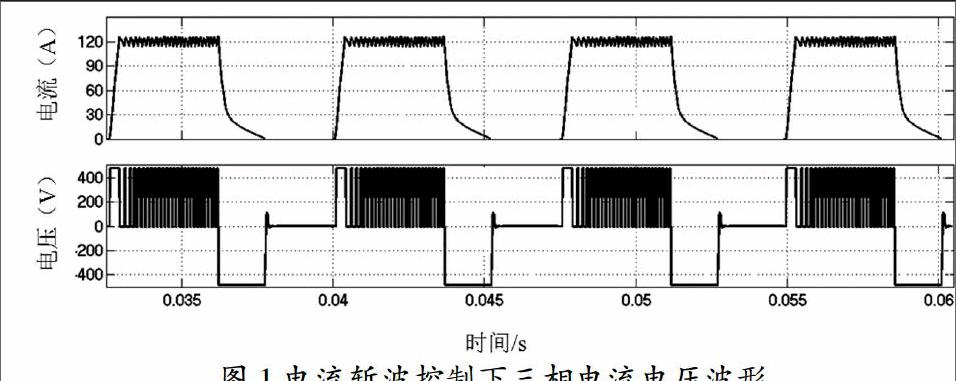
3.1 低速電流斬波控制
電機(jī)低速時(shí)采用電流斬波控制,圖1給出了轉(zhuǎn)速n=500r/min時(shí),采用電流斬波控制方式得到的一相電流和對應(yīng)的相電壓波形。從圖中可以看出加在導(dǎo)通相繞組兩端電壓為母線電壓513V或?yàn)榱恪夭〞r(shí)電流下降緩慢,電流維持在給定的限幅120A附近。
3.2 高速角度位置控制
電機(jī)高速運(yùn)行時(shí),導(dǎo)通周期短,電流的建立和續(xù)流會占很大比例,又由于存在運(yùn)動(dòng)電勢,因此電流峰值不大,不必采用電流斬波。通常采用控制開通角θon和關(guān)斷角θoff的角度位置控制。
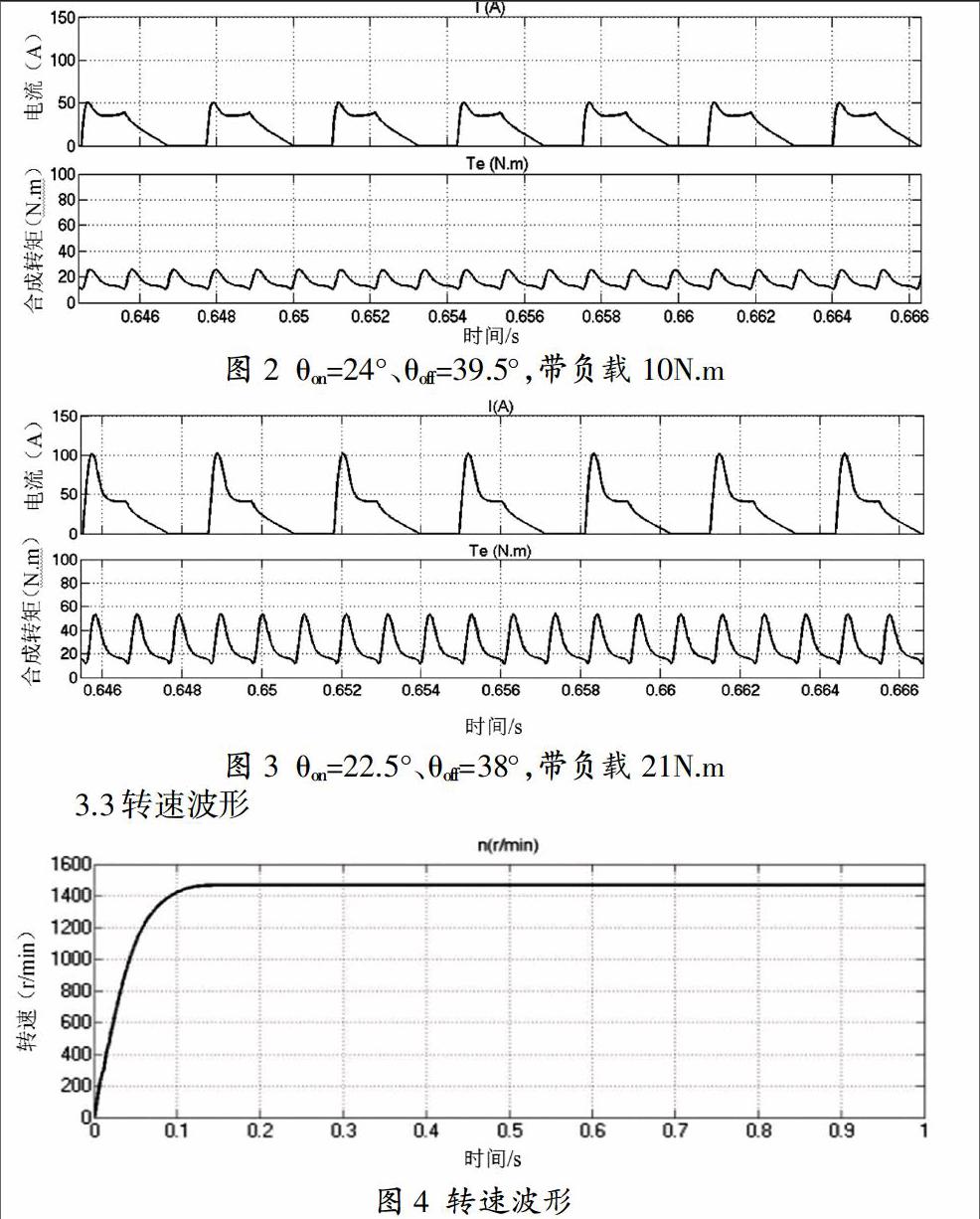
實(shí)際使用過程中,根據(jù)不同的系統(tǒng)要求,可以選取不同的優(yōu)化控制方法。圖2、圖3分別為給定轉(zhuǎn)速為2400r/min,電機(jī)高速穩(wěn)定運(yùn)行后,導(dǎo)通寬度相同,都為15.5°時(shí),不同開通角θon和關(guān)斷角θoff組合下的相電流波形和輸出轉(zhuǎn)矩波形。通過對比可知轉(zhuǎn)速一定時(shí),設(shè)定不同的開通角θon和關(guān)斷角θoff組合,其對應(yīng)的相電流大小、帶載能力不同,因此可以通過控制尋找最優(yōu)開通角和關(guān)斷角,來提高電機(jī)出力。
3.3轉(zhuǎn)速波形
轉(zhuǎn)速環(huán)采用PI控制器控制,圖4為控制器的PI參數(shù)分別為KP=0.5、KI=0.008,給定轉(zhuǎn)速為1500r/min時(shí)的轉(zhuǎn)速波形,通過PI調(diào)節(jié),電機(jī)轉(zhuǎn)速可以快速達(dá)到給定值并保持這一值不變。
4 結(jié)束語
文章利用MATLAB/Simulink仿真軟件搭建了SRD系統(tǒng)的仿真模型,該模型采用模塊化的思想,簡單靈活、易于修改,通用性強(qiáng)。仿真采用轉(zhuǎn)速電流雙閉環(huán)控制得到了電機(jī)運(yùn)行時(shí)的電流、電壓、轉(zhuǎn)矩、轉(zhuǎn)速波形,驗(yàn)證了搭建模型的正確性,表明了整個(gè)系統(tǒng)模型可以用于開關(guān)磁阻電機(jī)優(yōu)化控制的下一步研究。
參考文獻(xiàn)
[1]王宏華.開關(guān)磁阻電機(jī)調(diào)速控制技術(shù)[M].北京:機(jī)械工業(yè)出版社,2014.
[2]朱曰瑩,趙桂范,楊娜. 電動(dòng)汽車用開關(guān)磁阻電機(jī)驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)及優(yōu)化[J].電工技術(shù)學(xué)報(bào),2014,11:88-98.
[3]FeiPeng,JinYe,AliEmadi. A Digital PWM Current Controller for switched reluctance Motor Drives [J].KIEE Journals &Magazines,2016,31(10):7078-7096.