激光制導(dǎo)炸彈半實(shí)物仿真模型的校核與驗(yàn)證
2017-03-16 03:17:44張培忠鄭建福寧金貴蘇偉麗李仕華吳宏權(quán)
兵器裝備工程學(xué)報(bào) 2017年2期
關(guān)鍵詞:模型
張培忠,鄭建福,寧金貴,蘇偉麗,李仕華,吳宏權(quán)
(1.中國(guó)白城兵器試驗(yàn)中心, 吉林 白城 137001; 2.白城師范學(xué)院, 吉林 白城 137001)
【裝備理論與裝備技術(shù)】
激光制導(dǎo)炸彈半實(shí)物仿真模型的校核與驗(yàn)證
張培忠1,鄭建福1,寧金貴1,蘇偉麗2,李仕華1,吳宏權(quán)1
(1.中國(guó)白城兵器試驗(yàn)中心, 吉林 白城 137001; 2.白城師范學(xué)院, 吉林 白城 137001)
為了檢驗(yàn)激光制導(dǎo)炸彈半實(shí)物仿真模型的準(zhǔn)確性,建立了激光制導(dǎo)炸彈的飛行動(dòng)力學(xué)、運(yùn)動(dòng)學(xué)方程及其計(jì)算程序,將激光制導(dǎo)炸彈、激光目標(biāo)模擬器、五軸轉(zhuǎn)臺(tái)與仿真計(jì)算機(jī)聯(lián)接,構(gòu)建半實(shí)物仿真系統(tǒng),進(jìn)行半實(shí)物仿真實(shí)驗(yàn),獲得仿真數(shù)據(jù);運(yùn)用制導(dǎo)炸彈的概念和飛行力學(xué)理論校核仿真模型的正確性;利用無人機(jī)掛載激光制導(dǎo)炸彈實(shí)施投彈試驗(yàn),分析、對(duì)比試驗(yàn)數(shù)據(jù)與仿真數(shù)據(jù),驗(yàn)證仿真模型的準(zhǔn)確性。
兵器科學(xué)與技術(shù);制導(dǎo)炸彈;仿真模型
在研究、設(shè)計(jì)、改進(jìn)、鑒定制導(dǎo)炸彈的過程中,需要進(jìn)行各類試驗(yàn)獲取數(shù)據(jù),依此不斷改進(jìn)設(shè)計(jì)。試驗(yàn)會(huì)造成炸彈樣機(jī)、飛機(jī)架次以及其他方面的大量消耗,為了減少消耗,通常采用半實(shí)物仿真試驗(yàn)。為了保證仿真試驗(yàn)結(jié)果的準(zhǔn)確性和可信度,需要對(duì)仿真模型進(jìn)行校核、驗(yàn)證與確認(rèn)。
制導(dǎo)炸彈一般由激光或電視導(dǎo)引頭、前過渡艙、侵徹戰(zhàn)斗部、引信、尾部控制艙等組成。為了進(jìn)行仿真試驗(yàn),需要用數(shù)學(xué)方程式建立仿真模型,制導(dǎo)炸彈仿真模型包括4個(gè)模塊:導(dǎo)引頭系統(tǒng)模塊、彈體運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)系統(tǒng)模塊、彈體與目標(biāo)相對(duì)運(yùn)動(dòng)模塊和制導(dǎo)控制系統(tǒng)模塊。在半實(shí)物仿真試驗(yàn)中,導(dǎo)引頭系統(tǒng)、制導(dǎo)控制系統(tǒng)都是利用了制導(dǎo)炸彈實(shí)物,而彈體運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)系統(tǒng)模塊、彈體與目標(biāo)相對(duì)運(yùn)動(dòng)模塊則利用計(jì)算機(jī)解算[1],半實(shí)物仿真原理如圖1所示。
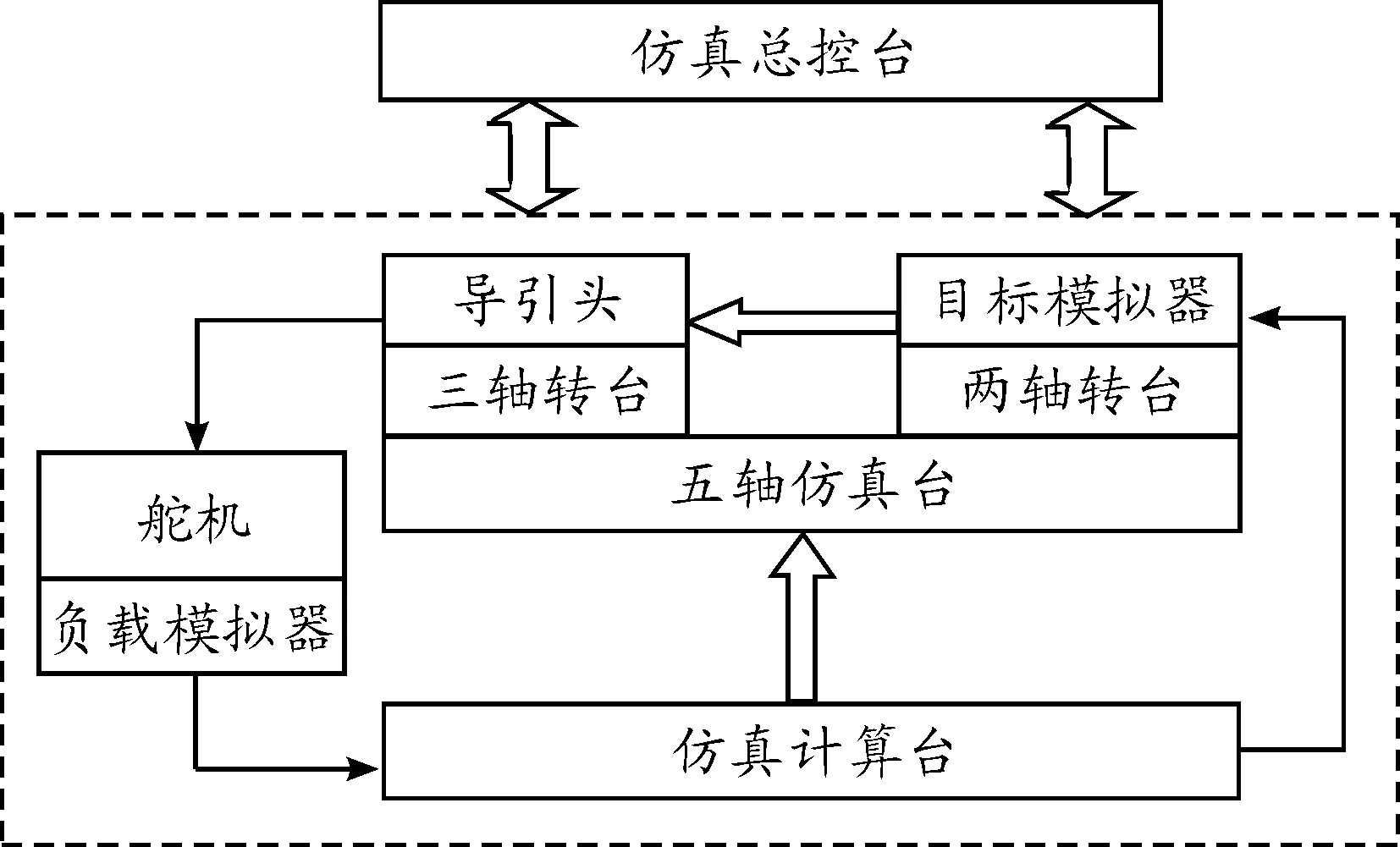
圖1 制導(dǎo)炸彈半實(shí)物仿真原理
1 仿真建模
1.1 坐標(biāo)系定義
利用4種經(jīng)典坐標(biāo)系建模:彈體坐標(biāo)系Ox1y1z1、地面坐標(biāo)系A(chǔ)xyz、彈道坐標(biāo)系Ox2y2z2、速度坐標(biāo)系Ox3y3z3(文中符號(hào)均采用彈箭飛行動(dòng)力學(xué)的通用符號(hào),下文同)。各個(gè)坐標(biāo)系之間的轉(zhuǎn)換關(guān)系也是經(jīng)典的[2]。
1.2 制導(dǎo)炸彈受的力和力矩

1.3 制導(dǎo)炸彈飛行動(dòng)力學(xué)、運(yùn)動(dòng)學(xué)方程
彈體質(zhì)心動(dòng)力學(xué)方程[4]
(1)
彈體繞質(zhì)心轉(zhuǎn)動(dòng)的動(dòng)力學(xué)方程[4]
(2)
彈體質(zhì)心的運(yùn)動(dòng)學(xué)方程[5-6]
(3)
彈體繞質(zhì)心轉(zhuǎn)動(dòng)的運(yùn)動(dòng)學(xué)方程
(4)
角度換算關(guān)系
sinβ=cosθ(cosγsin(ψ-ψv)+ sin?sinγcos(ψ-ψv))-cos?sinγsinθ
sinα=(cosθ(sin?cosγcos(ψ-ψv)- sinγsin(ψ-ψv))-sinθcos?cosγ)/cosβ
sinγv=(cosαsinβsin?-sinαsinβcosγcos?+ cosβsinγcos?)/cosθ
彈體—目標(biāo)相對(duì)運(yùn)動(dòng)方程組
2 仿真模型校核
運(yùn)用理論檢查和確定仿真模型是否正確表達(dá)了概念模型也就是仿真計(jì)算程序是否符合概念模型的數(shù)理理論、邏輯理論,實(shí)現(xiàn)仿真模型校核[7,8]。以某外貿(mào)型激光制導(dǎo)炸彈進(jìn)行半實(shí)物仿真試驗(yàn)。在半實(shí)物仿真實(shí)驗(yàn)室中,將激光制導(dǎo)炸彈的導(dǎo)引頭、彈控計(jì)算機(jī)、GPS制導(dǎo)、慣性導(dǎo)航、舵機(jī)等所有部件接入半實(shí)物仿真回路,如圖2所示。調(diào)試彈道計(jì)算程序、仿真控制程序。依據(jù)仿真試驗(yàn)大綱進(jìn)行半實(shí)物仿真試驗(yàn),獲得炸彈的速度、角速度、炸彈的坐標(biāo)、彈道角、姿態(tài)角、攻角、側(cè)滑角、速度傾角等仿真數(shù)據(jù),如圖3~圖6所示。
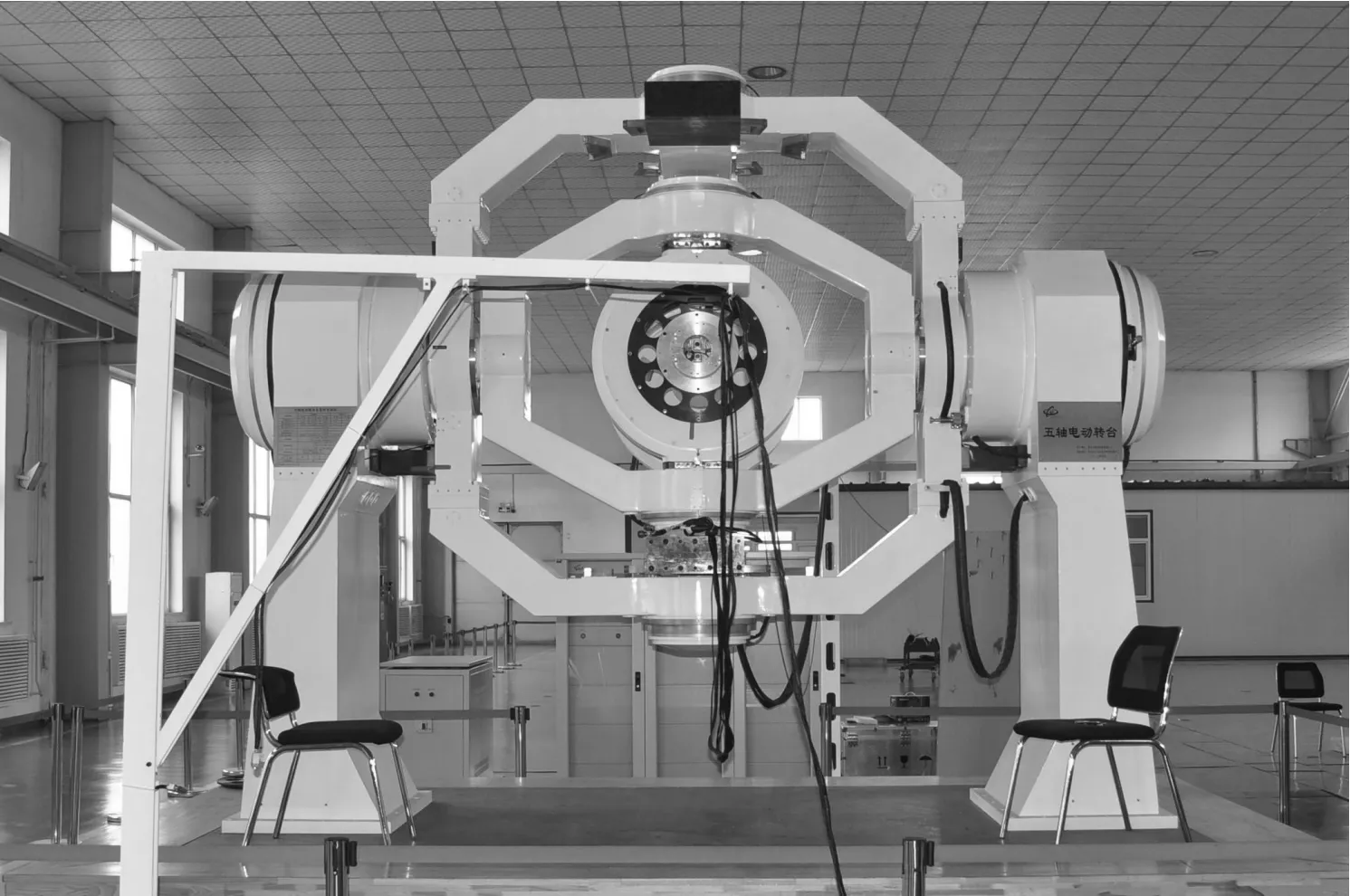
圖2 半實(shí)物仿真實(shí)驗(yàn)室

圖3 激光制導(dǎo)炸彈速度仿真數(shù)據(jù)
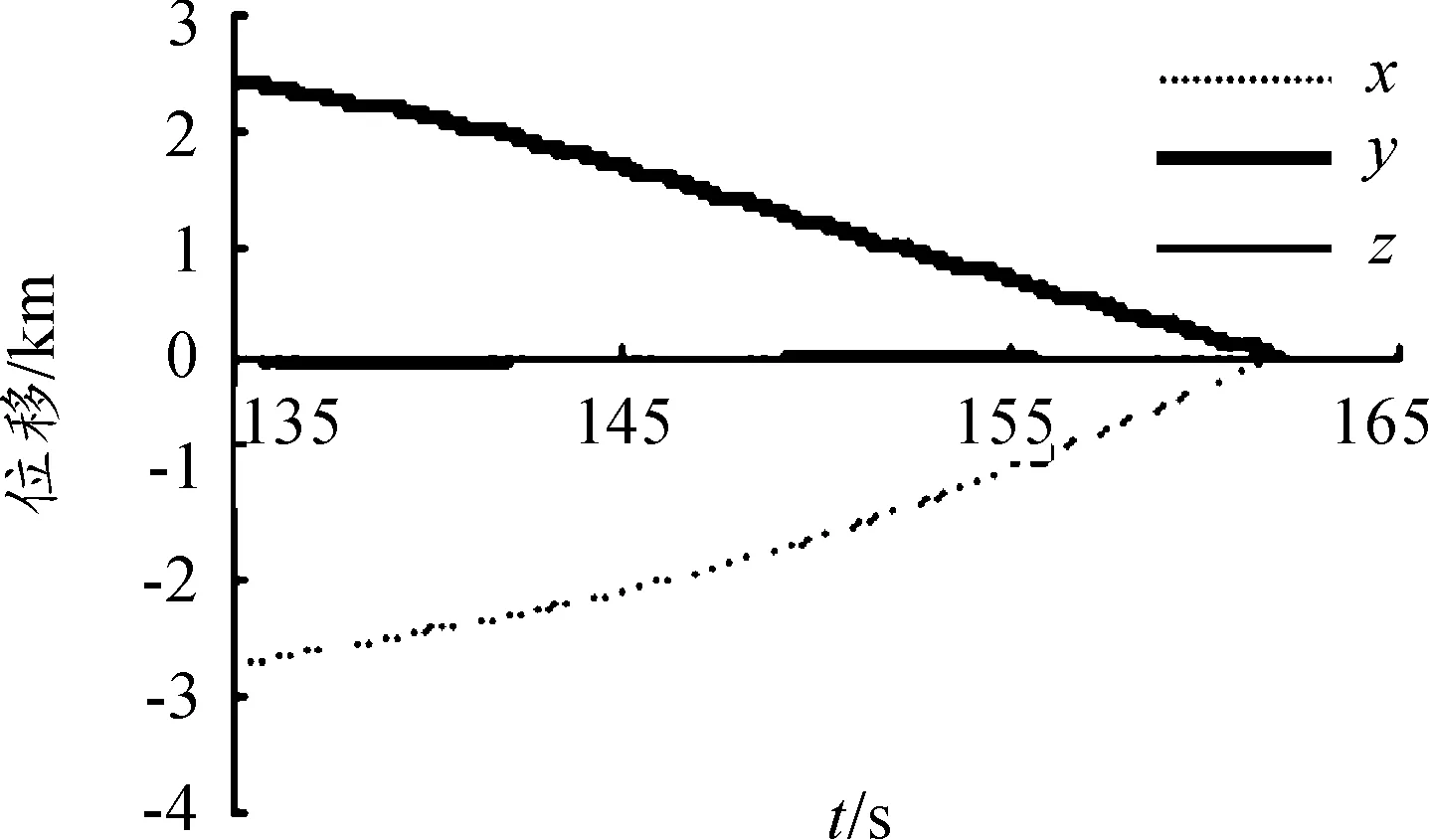
圖4 激光制導(dǎo)炸彈彈道仿真數(shù)據(jù)
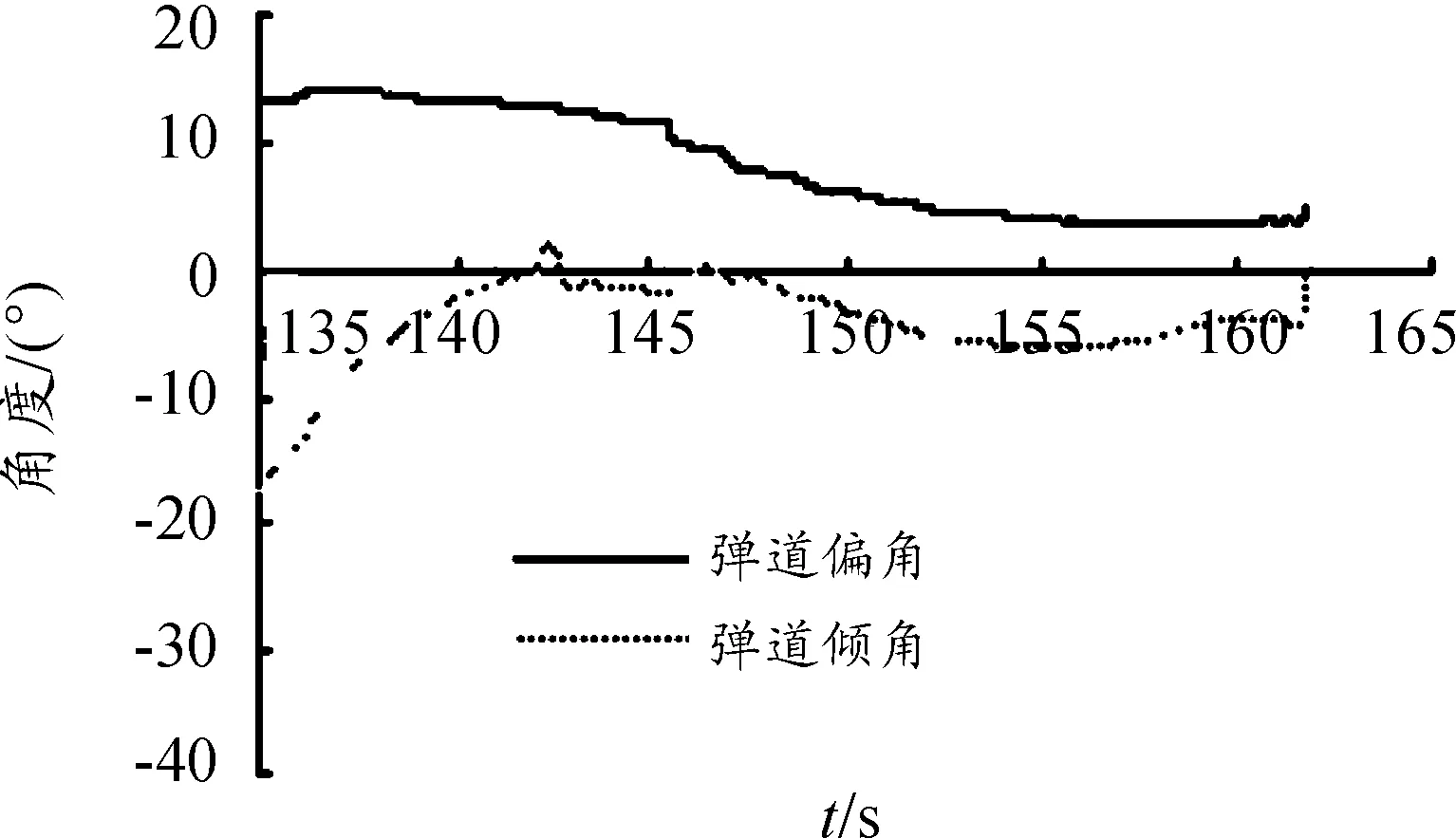
圖5 激光制導(dǎo)炸彈彈道角仿真數(shù)據(jù)
圖6 激光制導(dǎo)炸彈姿態(tài)角仿真數(shù)據(jù)
制導(dǎo)炸彈借助于飛機(jī)、無人機(jī)投放,當(dāng)它離開飛機(jī)、無人機(jī)以后,靠自身慣性、重力飛行,沒有火箭推力,也不作旋轉(zhuǎn)運(yùn)動(dòng),因此在無側(cè)風(fēng)作用時(shí),其運(yùn)動(dòng)過程中只有向前飛、向下降落的速度,仿真計(jì)算的制導(dǎo)炸彈的位移、速度、姿態(tài)角也與制導(dǎo)炸彈的動(dòng)力學(xué)、運(yùn)動(dòng)學(xué)理論相符合。當(dāng)導(dǎo)引頭控制舵片偏轉(zhuǎn)以修正視線角時(shí),炸彈有較小的偏航速度,沒有滾轉(zhuǎn)角速度,相應(yīng)地偏航位移、偏航角、滾轉(zhuǎn)角就很小,甚至為0,表明姿態(tài)角收斂,保證了目標(biāo)始終處在激光導(dǎo)引頭視場(chǎng)內(nèi),激光導(dǎo)引頭一直在跟蹤由模擬器產(chǎn)生的目標(biāo)。圖3~圖6的結(jié)果說明仿真程序正確表達(dá)了制導(dǎo)炸彈概念模型,仿真程序通過了模型校核[9-11]。
3 仿真模型驗(yàn)證
模型驗(yàn)證是在仿真模型通過校核以后,進(jìn)一步檢驗(yàn)仿真模型是否準(zhǔn)確地反映了實(shí)物系統(tǒng)構(gòu)思、假設(shè)、情景、現(xiàn)象,尤其要通過實(shí)驗(yàn)、試驗(yàn)手段檢查仿真模型的輸出是否與實(shí)物系統(tǒng)、構(gòu)思、假設(shè)、情景、現(xiàn)象的輸出一致[7,8]。利用某型無人機(jī)掛載某外貿(mào)型激光制導(dǎo)炸彈進(jìn)行驗(yàn)證,見圖7。利用經(jīng)緯儀測(cè)試制導(dǎo)炸彈飛行軌跡,在激光制導(dǎo)炸彈上安裝遙測(cè)裝置,并由遙測(cè)車收集制導(dǎo)炸彈速度、姿態(tài)角數(shù)據(jù)。依據(jù)飛行試驗(yàn)大綱,進(jìn)行激光制導(dǎo)炸彈的投彈試驗(yàn),獲得了炸彈的飛行速度(見圖8)、飛行軌跡(見圖9)和飛行姿態(tài)角(見圖10),測(cè)試脫靶量。依此數(shù)據(jù)與仿真數(shù)據(jù)對(duì)比,驗(yàn)證仿真模型。

圖7 某型無人機(jī)掛載激光制導(dǎo)炸彈
圖8 激光制導(dǎo)炸彈速度實(shí)測(cè)數(shù)據(jù)
圖9 激光制導(dǎo)炸彈彈道實(shí)測(cè)數(shù)據(jù)

圖10 激光制導(dǎo)炸彈姿態(tài)角實(shí)測(cè)數(shù)據(jù)
從圖11(a)、圖11(b)可以看出,不同投彈高度、速度、拋射角的條件下,各條仿真彈道均無脫靶,實(shí)際試驗(yàn)結(jié)果也是炸彈命中了目標(biāo)。從圖6、圖10顯示的制導(dǎo)炸彈姿態(tài)角仿真與測(cè)試結(jié)果表明,制導(dǎo)炸彈的姿態(tài)角處于收斂狀態(tài),激光導(dǎo)引頭始終跟蹤目標(biāo)、炸彈擊中目標(biāo)。圖12顯示的制導(dǎo)炸彈飛行速度仿真與測(cè)試結(jié)果基本一致。試驗(yàn)結(jié)果驗(yàn)證了仿真模型[12-13]。
圖11 彈道仿真與實(shí)測(cè)數(shù)據(jù)
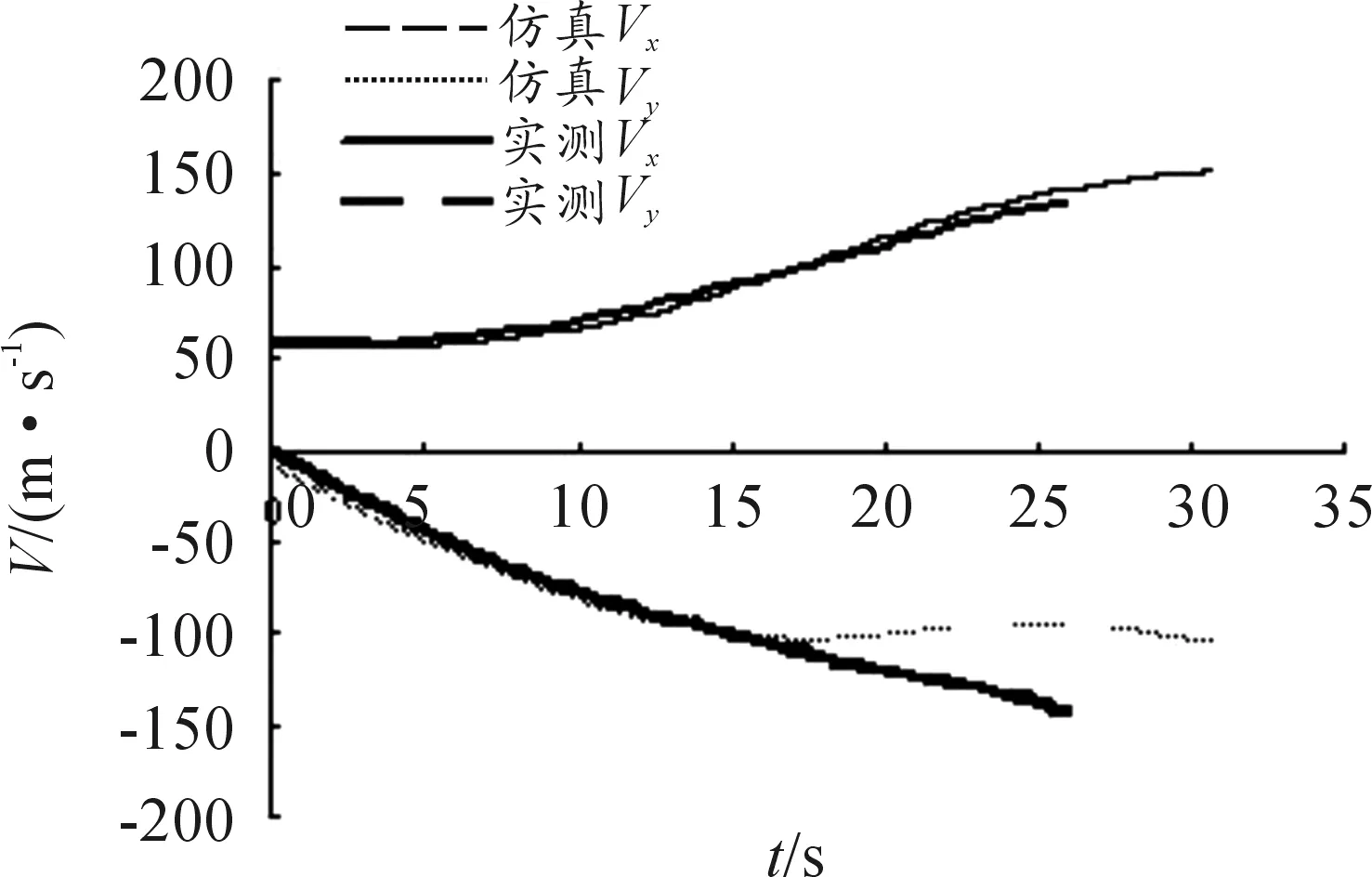
圖12 速度仿真與實(shí)測(cè)數(shù)據(jù)
4 結(jié)論
建立了激光制導(dǎo)炸彈仿真模型,對(duì)某外貿(mào)型激光制導(dǎo)炸彈進(jìn)行了半實(shí)物仿真試驗(yàn),獲得仿真數(shù)據(jù)校核模型,利用無人機(jī)掛載激光制導(dǎo)炸彈進(jìn)行投彈試驗(yàn),獲得飛行實(shí)測(cè)數(shù)據(jù),驗(yàn)證了仿真模型。通過研究得出以下結(jié)論:
1) 利用半實(shí)物仿真試驗(yàn)獲得制導(dǎo)炸彈的位移、速度、姿態(tài)角仿真數(shù)據(jù),可以從概念上、理論上檢查仿真程序,校核仿真模型概念、理論的正確性;
2) 利用制導(dǎo)炸彈飛行試驗(yàn)獲得炸彈的位移、速度、姿態(tài)角實(shí)測(cè)數(shù)據(jù),可與仿真數(shù)據(jù)比較、分析,檢查仿真程序計(jì)算結(jié)果的準(zhǔn)確性;
3) 通過制導(dǎo)炸彈投彈試驗(yàn)獲得脫靶量,與仿真計(jì)算的脫靶量一致,驗(yàn)證了仿真模型。
[1] 單家元.半實(shí)物仿真[M].北京:國(guó)防工業(yè)出版社,2008.
[2] 袁子懷.有控飛行力學(xué)與計(jì)算機(jī)仿真[M].北京:國(guó)防工業(yè)出版社,2001:67-73.
[3] 韓子鵬.彈箭外彈道學(xué)[M].北京:北京理工大學(xué)出版社,2008:127-143.
[4] 錢杏芳.導(dǎo)彈飛行力學(xué)[M].北京:北京理工大學(xué)出版社,2008:28-48.
[5] 吳宏權(quán).基于預(yù)報(bào)誤差的模型參數(shù)辨識(shí)仿真研究[J].系統(tǒng)仿真學(xué)報(bào),2013(4):920-936.
[6] WU Hongquan.Error modeling and simulation foe directional testing of block[Z].SIMUL TECH,2015:461-468.
[7] 焦鵬.炸彈制導(dǎo)仿真系統(tǒng)VV-A理論和方法研究[D].長(zhǎng)沙:國(guó)防科技大學(xué),2010.
[8] 劉藻珍.系統(tǒng)仿真[M].北京:北京理工大學(xué)出版社,1998:193-203.
[9] 郭師虹,楊寶民.仿真可信性分析新方法研究[J].西安建筑科技大學(xué)學(xué)報(bào)(自然科學(xué)版),2001,33(3):271-273.
[10]李鵬波,張金槐,LiPengbo,等.仿真可信性的研究綜述[J].計(jì)算機(jī)仿真,2000,17(4):12-14.
[11]金振中,向楊蕊.武器系統(tǒng)仿真結(jié)果可信性分析及其應(yīng)用[J].系統(tǒng)仿真學(xué)報(bào),2009,21(12):3599-3602.
[12]HE Chi.Design of firing impulse simulation and analysis of its key technology.SIMUL TECH,2015:453-460.
[13]李鵬波.仿真可信性及其在炸彈系統(tǒng)一體化研究中的應(yīng)用[D].長(zhǎng)沙:國(guó)防科學(xué)技術(shù)大學(xué),1999.
(責(zé)任編輯 周江川)
Verifying and Validating Hardware-in-the-Loop Simulation Model of Laser Guided Aerial Jamming
ZHANG Pei-zhong1, ZHENG Jian-fu1, NING Jin-gui1,SU Wei-li2, LI Shi-hua1, WU Hong-quan1
(1.Ordnance Test Center of Baicheng China, Baicheng 137001, China;2.Baicheng Normal University, Baicheng 137001, China)
In order to check the accuracy of the hardware-in-the-loop simulation model of laser guided aerial jamming, the flying dynamics equations, kinematics equations and computing program of laser guided aerial jamming were established. The laser guided aerial jamming, laser target simulator, five-axis were conjunct in the simulating loop. The flying dynamics equations and kinematics equations computing software were input in simulating computer. By the hardware-in-the-loop simulation, the simulating results were gotten. Beyond the concept of guided aerial jamming and the theory of flying dynamic, the simulation model was verified. In the flying projecting test, a laser guided aerial jamming was projected from pilot-less aircraft. Comparing the test results with simulating results, the accuracy of the hardware-in-the-loop simulation model was validated.
ordnance science and technology; guided aerial jamming; simulation model
2016-09-30;
2016-10-25
張培忠(1966—),男,博士,研究員,主要從事火炮、自能動(dòng)武器與彈藥工程研究,E-mail:zhangpeizhong9966@163.com。
10.11809/scbgxb2017.02.003
張培忠,鄭建福,寧金貴,等.激光制導(dǎo)炸彈半實(shí)物仿真模型的校核與驗(yàn)證[J].兵器裝備工程學(xué)報(bào),2017(2):9-12.
format:ZHANG Pei-zhong, ZHENG Jian-fu, NING Jin-gui,et al.Verifying and Validating Hardware-in-the-Loop Simulation Model of Laser Guided Aerial Jamming[J].Journal of Ordnance Equipment Engineering,2017(2):9-12.
O303;TJ413+.2
A
2096-2304(2017)02-0009-04
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
